MODUL 2 SISTEM KENDALI KECEPATAN
Muhammad Aldo Aditiya Nugroho (13213108)
Asisten: Jedidiah Wahana(13212141) Tanggal Percobaan: 12/03/16 EL3215 Praktikum Sistem Kendali
Laboratorium Sistem Kendali dan Komputer - Sekolah Teknik Elektro
dan Informatika ITB
Abstrak
Pada praktikum kali ini akan dilakukan pengendalian terhadap kecepatan motor DC. Praktikum kali ini dilakukan menggunakan Modular Servo System MS-150, multimeter, osiloskop, dan jumper. Percobaan-percobaan yang akan dilakukan pada praktikum ini yaitu mengamati pengendalian kecepatan menggunakan sistem lingkar terbuka dan mengamati pengendalian kecepatan menggunakan sistem lingkar tertutup.
Kata kunci: motor, MS-150, kecepatan, PID.
1. PENDAHULUAN
Praktikum kali ini diadakan dengan tujuan agar praktikan memahami konsep sistem pegendalian kecepatan motor DC secara umum, baik menggunakan sistem loop terbuka maupun loop tertutup, memahami sistem PID dalam pengendalian kecepatan motor DC, dan mampu melakukan analisis kinerja terhadap suatu sistem kontrol. Pada praktikum kali ini, kami melakukan 2 buah percobaan, yaitu mengamati pengendalian kecepatan dengan menggunakan sistem loop terbuka dan mengamati pengendalian kecepatan dengan sistem loop tertutup.
Pada laporan ini akan dipaparkan tata cara secara singkat untuk melakukan percobaan-percobaan pada praktikum kali ini dan juga hasil yang kami dapat beserta analisisnya.
2. STUDI PUSTAKA
2.1 JENIS SISTEM PENGENDALIAN Pada dasarnya ada dua jenis sistem pengendalian, yaitu pengendalian loop terbuka dan pengendalian loop tertutup. Pada pengendalian loop terbuka output dari sistem tidak di umpan balikkan untuk dibandingkan dengan sinyal referensi. Sistem pengendalian loop terbuka rentan
terhadap error dan noise karena tidak adanya pembandingan terhadap referensi.
Gambar 2-1 Diagram Blok Sistem Loop Terbuka
Pada pengendalian loop tertutup output dari sistem diumpan balikkan untuk dibandingkan dengan sinyal referensi. Sistem pengendalian loop tertutup lebih tahan terhadap error dibandingkan dengan sistem loop terbuka
Gambar 2-2 Diagram Blok Sistem Loop Tertutup
2.2 PENGENDALI PID
Sistem pengendali PID adalah sistem yang digunakan secara luas pada berbagai bidang industri. Pengendali PID terdiri dari 3 komponen, yaitu proporsional, integral, dan derivatif.
2.2.1 PROPORSIONAL
Hubungan antara sinyal error e dengan sinyal kontrol u adalah sebagai berikut:
u (t)=Kpe (t)
Komponen proporsional digunakan untuk meningkatkan penguatan dan mempercepat respon transien.
2.2.2 INTEGRAL
Hubungan antara sinyal error e dengan sinyal kontrol u adalah sebagai berikut:
u (t)=Ki
∫
0t
e (t )dt
Komponen integral digunakan untuk menghilangkan steady state error, walaupun menghasilkan overshoot sehingga keadaan steady state lebih lama dicapai
2.2.3 DERIVATIF
Hubungan antara sinyal error e dengan sinyal kontrol u adalah sebagai berikut:
u (t)=Kd
de(t )
dt
Komponen derivatif digunakan untuk mempercepat respon transien, walaupun komponen ini akan meningkatkan derau pada sistem.
3. HASIL DAN ANALISIS
Berikut adalah percobaan beserta langkah-langkah yang praktikan lakukan ketika praktikum
3.1 SISTEM PENGENDALIKECEPATAN : PENGENDALIAN LINGKAR TERBUKA Pada percobaan ini akan dilakukan pengamatan pada pengendalian lingkar terbuka, yaitu hubungan umpan balik dari tegangan tachogen ke unit op-amp tidak disambungkan. Pertama- tama diamati nilai tegangan deadband, yaitu tegangan dimana motor tepat berputar. Didapatkan tegangan deadband = 4.48V.
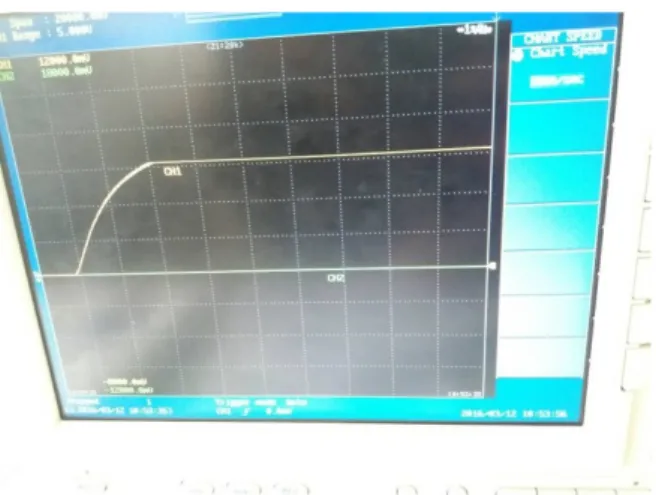
Setelah didapatkan data tegangan deadband, saklar dibuka dan tegangan pada AU diatur sehingga berada pada 6 – 7V. Tegangan yang praktikan gunakan adalah 6.5 V. Tegangan keluaran tachogen dihubungkan pada osiloskop dan saklar-1 ditutup. Didapatkan hasil sebagai berikut:
Gambar 3-1 Grafik Tegangan Tachogen Lingkar Terbuka,
Bisa dilihat bahwa diperlukan waktu untuk motor mencapai keadaan steady state, dimana nilai tegangannya dan kecepatannya akan tetap (kecuali diberikan gaya eksternal).
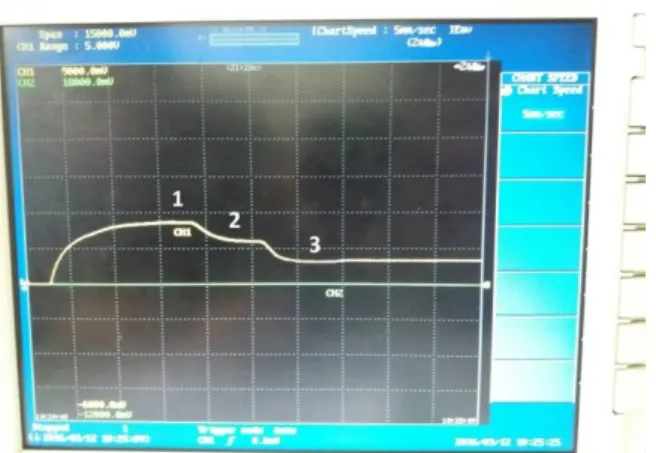
Gambar 3-2 Grafik Tegangan Tachogen Lingkar Terbuka, untuk Variasi Posisi Rem Pada grafik tersebut ada 3 level tegangan, yaitu level 1 dimana posisi rem magnetik pada skala 3, level 2 dimana posisi rem magnetik pada skala 6, dan level 3 dimana posisi rem magnetik pada skala 9. Perlu dicatat bahwa posisi-posisi yang sama akan digunakan untuk percobaan –percobaan berikutnya.
Apabila kita perhatikan pada gambar grafik di atas, bisa dilihat bahwa semakin besar skala yang digunakan pada rem magnetik, semakin kecil tegangan yang terbaca pada tachogenerator. Untuk menjelaskan mengapa hal ini terjadi, kita harus mengetahuiprinsip kerja motor DC terlebih dahulu. Motor DC dapat berputar karena dialiri arus listrik pada sautu konduktor, dimana konduktor tersebut berada pada daerah yang memiliki medan magnet dari magnet permanen. Berdasarkan hukum Lorentz, apabila ada suatu arus yang melewati medan magnet maka akan terjadi gaya lorentz, sehingga motor DC akan memutar. Apabila kita memberikan rem magnetik, akan timbul suatu arus yang disebut eddy current, yang dihasilkan karena suatu konduktor bergerak melewati sebuah medan magnet. Berdasarkan hukum Lenz, arus tersebut akan menghasilkan medan magnet sendiri yang melawan arah medan magnet rem. Tegangan pada tachogenerator berkurang karena sebagian energinya digunakan untuk melawan tegangan hasil ggl induksi. Hasilnya tegangan pada tachogen akan semakin kecil dan gerakan motor
yang didapatkan sesuai.
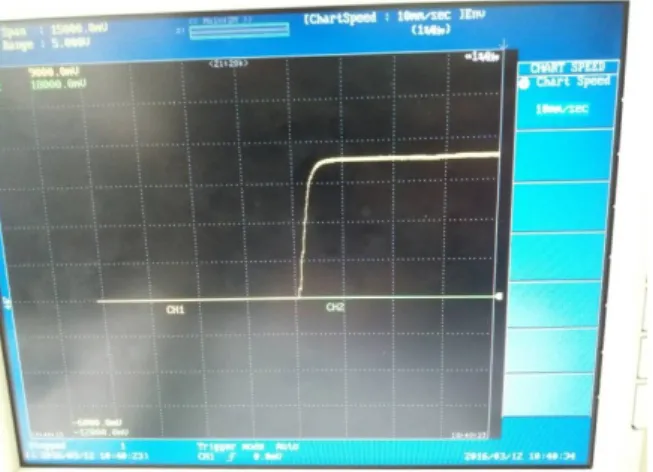
3.2 SISTEM PENGENDALIKECEPATAN : PENGENDALIAN LINGKAR TERTUTUP Pada percobaan ini akan dilakukan pengamatan pada pengendalian lingakr tertutup, yaitu hubungan umpan balik dari tegangan tachogen ke unit op-amp disambungkan. Umpan balik yang digunakan adalah umpan balik negatif. Tegangan pada AU di set sehingga bernilai sama seperti percobaan sebelumnya, yaitu 6.5 V. Grafik yang pertama kali diamati adalah ketika nilai Kp = 1 dan komponen integrator serta derivatif tidak aktif. Hal pertama yang diperhatikan adalah grafik setting motor, yaitu dari keadaan mati hingga keadaan steady state (tunak). Grafik tersebut dapat dilihat pada gambar di bawah ini:
Gambar 3-3 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 1.
Apabila kita membandingkan grafik di atas dengan grafik pada saat lingkar terbuka, bisa dilihat bahwa pada kondisi loop tertutup waktu untuk mencapai steady state lebih cepat dibandingkan dengan pada kondisi loop terbuka.
Berikutnya diamati tegangan apabila posisi rem diubah-ubah. Hasil yang didapatkan adalah sebagai berikut:
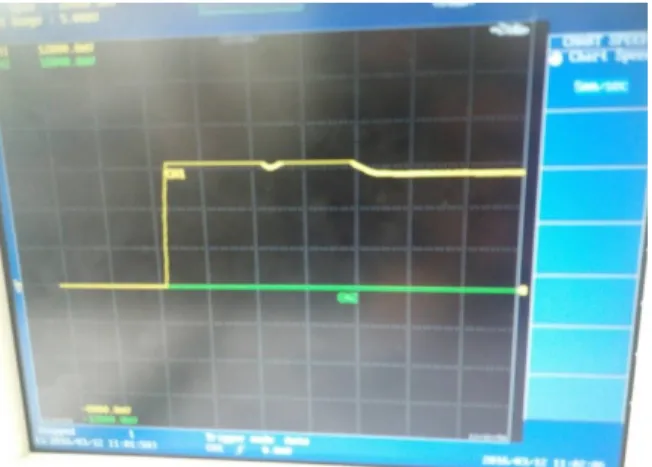
Gambar 3-4 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 1, Variasi Posisi Rem.
Grafik yang dihasilkan serupa dengan grafik 3-2, dimana semakin besarnya rem
pada tachogenerator akan semakin kecil, dan gerakan motor akan semakin lambat. Perbedaannya terletak pada fungsi transfer. Persamaan sistem loop tertutup dengan feedback negatif adalah sebagai berikut:
ω
m(
s)
V
m(
s)
=
K
1+K K
tcgτ
1+ K K
tcgs+ 1
3.2.1 VARIASI NILAI KPUntuk percobaan berikutnya akan dilakukan hal yang sama, dengan mengubah nilai Kp menjadi 2, 4, dan 6.
Kp = 2
Percobaan yang dilakukan sama seperti sebelumnya, tetapi dengan nilai Kp yang berbeda, yaitu Kp = 2. Grafik yang didapatkan adalah sebagai berikut:
Gambar 3-5 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 2.
Kemudian dilakukan pengamatan pada beberapa nilai posisi rem yang berbeda-beda. Hasil yang didapatkan adalah sebagai berikut:
Gambar 3-6 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 2 Variasi Posisi Rem.
Kp = 4
Percobaan yang dilakukan sama seperti sebelumnya, tetapi dengan nilai Kp yang berbeda, yaitu Kp = 4. Grafik yang didapatkan adalah sebagai berikut:
Gambar 3-7 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 4.
Kemudian dilakukan pengamatan pada beberapa nilai posisi rem yang berbeda-beda. Hasil yang didapatkan adalah sebagai berikut:
Gambar 3-8 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 4 Variasi Posisi Rem.
Kp = 6
Percobaan yang dilakukan sama seperti sebelumnya, tetapi dengan nilai Kp yang berbeda, yaitu Kp = 2. Grafik yang didapatkan adalah sebagai berikut:
Gambar 3-9 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 6.
Kemudian dilakukan pengamatan pada beberapa nilai posisi rem yang berbeda-beda. Hasil yang didapatkan adalah sebagai berikut:
Gambar 3-10 Grafik Tegangan Tachogen Lingkar Tertutup, Kp = 6 Variasi Posisi Rem.
Bila kita membandingkan grafik-grafik yang didapatkan, dapat disimpulkan bahwa semakin besar nilai Kp, semakin besar tegangan yang terbaca pada tachogen. hal ini dikarenakan sinyal dikalikan sebesar Kp, jadi semakin besar Kp maka nilai tegangan sinyalakan semakin besar. Selain itu, efek pembebanan dapat terlihat berapapun nilai Kp yang digunakan.
Apabila kita bandingkan grafik-grafik hasil keluaran di atas dengan grafik hasil percobaan dengan loop terbuka, bisa dilihat bahwa dengan menambahkan komponen proporsional kita bisa mempercepat respon transiennya. Hal ini dikarenakan tegangan steady state akan semakin tinggi dengan dinaikkannya nilai Kp. Sehingga bisa disimpulkan bahwa komponen proporsional dapat digunakan utnuk mempercepat respon transien.
pada grafik dengan komponen Kp dan grafik pada keadaan open loop, bisa dilihat bahwa pada grafik berkomponen Kp grafik steady statenya lurus (bernilai tetap). Sedangkan pada grafik keadaan open loop, nilai steady statenya tidak lurus, sehingga nilainya akan menyimpang dari harapan. Hal ini dikarenakan pada sistem open loop tidak ada cara untuk memperbaiki error dari output sistem, sedangkan pada sistem closed loop output dari sistem akan digunakan untuk memperbaiki sinyal masukan, sehingga sinyal output dapat diperbaiki.
3.2.2 VARIASI NILAI ΤI
Pada percobaan ini akan dilakukan pengamatan yang sama seperti percobaan-percobaan sebelumnya, tetapi dengan mengeset niali Kp = 1 dan memvariasikan nilai τi. Nilai-nilai τi yang digunakan adalah 0.2, 0.4, dan 0.6.
τi = 0.2
Berikut ini adalah gambar grafik tegangan tachogenerator untuk τi = 0.2 s.
Gambar 3-11 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.2
Sedangkan berikut ini adalah gambar tegangan tachogenerator τi = 0.2 s untuk posisi rem yang diubah-ubah.
Lingkar Tertutup, τi = 0.2, Variasi Posisi Rem.
τi = 0.4
Berikut ini adalah gambar grafik tegangan tachogenerator untuk τi = 0.4 s.
Gambar 3-13 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.4
Sedangkan berikut ini adalah gambar tegangan tachogenerator τi = 0.4 s untuk posisi rem yang diubah-ubah.
Gambar 3-14 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.4, Variasi Posisi Rem.
τi = 0.6
Berikut ini adalah gambar grafik tegangan tachogenerator untuk τi = 0.6 s.
Gambar 3-15 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.6
Sedangkan berikut ini adalah gambar tegangan tachogenerator τi = 0.2 s untuk posisi rem yang diubah-ubah.
Gambar 3-16 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.6, Variasi Posisi Rem.
Pada gambar grafik di atas, tidak terlihat efek overshoot. Hal ini tidak sesuai dengan karakteristik komponen integrator pada umumnya, dimana sinyal akan naik turun sebelum pada akhirnya sampai ke steady state. Apabila overshoot dapat terlihat, hasil yang diharapkan yaitu semakin tinggi integral time τi, semakin kecil overshoot yang dihasilkan, sehingga sistem mencapai steady state lebih cepat.
Bila kita lihat pada grafik di atas, bisa didapatkan bahwa apabila kita menaikkan posisi rem, tegangan akan berkurang untuk sementara, lalu naik lagi (kecuali untuk rem pada posisi 9). Hal ini dikarenakan komponen integrator, yang berfungsi untuk memperbaiki error steady state.
3.2.3 NILAI ΤD = 0.2 S
Pada percobaan ini akan dilakukan pengamatan yang sama seperti percobaan-percobaan sebelumnya, tetapi dengan
mengeset Kp = 1 dan τd = 0.2 s. Grafik yang didapatkan adalah sebagai berikut:
Gambar 3-17 Grafik Tegangan Tachogen Lingkar Tertutup, τd = 0.2.
Sedangkan grafik yang didapatkan dengan memvariasikan posisi rem adalah sebagai berikut:
Gambar 3-18 Grafik Tegangan Tachogen Lingkar Tertutup, τd = 0.2, Variasi Posisi Rem.
Efek dari penggunaan komponen drivatif tidak terlihat begitu jelas pada gambar di atas, karena nilai Kp yang kurang besar untuk dapat melihat dengan jelas drau pada grafik. Penggunaan komponen derivatif akan mempercepat respon transien dari suatu sistem, tetapi akan meningkatkan derau dari sistem tersebut. 3.2.4 VARIASI NILAIΤI DAN KP Pada percobaan ini akan dilakukan pengamatan pada sistem dengan memvariasikan niali τi dan Kp. Pasangan nilai τi dan Kp yang digunakan adalah τi = 0.2 dan Kp = 2, τi = 0.4 dan Kp = 4, serta τi = 0.6 dan Kp = 6.
τi = 0.2 dan Kp = 2
Grafik yang didapatkan untuk nilai τi dan Kp yang bersangkutan adalah sebagai berikut:
Gambar 3-19 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.2, Kp = 2.
Sedangkan grafik yang didapatkan dengan memvariasikan posisi rem adalah sebagai berikut:
Gambar 3-20 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.2, Kp = 2, Variasi Posisi Rem
τi = 0.4 dan Kp = 2
Grafik yang didapatkan untuk nilai τi dan Kp yang bersangkutan adalah sebagai berikut:
Lingkar Tertutup, τi = 0.4, Kp = 4.
Sedangkan grafik yang didapatkan dengan memvariasikan posisi rem adalah sebagai berikut:
Gambar 3-22 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.4 Kp = 4, Variasi Posisi Rem
τi = 0.6 dan Kp = 6
Grafik yang didapatkan untuk nilai τi dan Kp yang bersangkutan adalah sebagai berikut:
Gambar 3-23 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.6, Kp = 6.
Sedangkan grafik yang didapatkan dengan memvariasikan posisi rem adalah sebagai berikut:
Gambar 3-24 Grafik Tegangan Tachogen Lingkar Tertutup, τi = 0.6, Kp = 6, Variasi Posisi Rem
Dengan membandingkan grafik tegangan tachogen pada percobaan ini dengan percobaan yang hanya menggunakan komponen proporsional, terlihat bahwa dengan menambahkan komponen integrator kita bisa mempercepat transient responsenya. Semakin tinggi nilai Kp dan nilai integral time yang digunakan, semakin cepat transient response yang dihasilkan. Apabila kita bandingkan dengan grafik pada sistem dengan hanya komponen integrator, dapat terlihat bahwa dengan menambahkan komponen proporsional error pada steady state dapat diperbaiki dengan lebih cepat dibandingkan tanpa komponen proporsional. Dengan menaikkan nilai Kp dan integral time, pembetulan error steady state akan semakin cepat.
pada grafik ini tidak terlihat adanya overshoot. tetapi apabila overshoot dapat diamati, hasil yang didapatkan seharusnya overshoot akan semakin berkurang seiring dengan naiknya nilai Kp dan integral time. Sehingga bisa disimpulkan, bahwa untuk mendapatkan transient response yang cepat serta mengurangi overshoot, kita bisa menggunakan komponen proporsional dan integrator.
4. KESIMPULAN
Kesimpulan yang saya dapatkan setelah melewati modul 2 ini adalah sebagai berikut:
Dengan mengerem motor, tegangan yang dihasilkan pada tachogenerato motor akan berkurang
Sistem loop terbuka lebih rentan terhadap noise dan error steady state dibandingkan dengan sistem loop tertutup
Komponen P (Proportional) bisa kita gunakan untuk menaikkan besar kecepatan motor serta kecepatan transient responsenya
Komponen I (Integrator) bisa kita gunakan untuk menekan error steady state, dengan tradeoff adanya overshoot
Untuk memperbaiki overshoot dari komponen Integrator kita bisa menggunakan komponen proporsional, sehingga steady state lebih cepat dicapai
Daftar Pustaka
[1] Modul Praktikum Sistem Kendali EL3215, Laboratorium Sistem Kendali dan Komputer, ITB, 2016.