Perancangan Dan Analisa Performansi Tanggapan Tegangan
Sistem Kendali Automatic Voltage Regulator (AVR) Dalam
Domain Waktu Dengan Pendekatan Tanggapan Frekuensi
Heru Dibyo Laksono
1, Mazues
1, Fitrilina
1, Wayu Diafredho
21Jurusan Teknik Elektro, Fakultas Teknik Universitas Andalas [email protected]
ABSTRACT
This journal discusses the design and performance analysis of the voltage respond control system of AVR are in type of direct current in the time domain with Proportional controller (P), Proportional Differential controller (PD), Proportional Integral controller (PI), Proportional Integral Differential controller (PID). The controllers were designed with a frequency response approach with specific design criteria and the help of Matlab software. For the performance analysis in the time domain consists of error and transition analysis. For the parameters were observed in errors analysis including the type of system, positioning errors constants, velocity error constants, error acceleration constants, steady state error to steps input unit, steady state error to unit steps input, steady state error to rate input and steady state error to parabolic input. For transition analysis, the parameters observed rise time, peak time, settling time, peak value and maximum overshoot value. The Results of the analysis showed that the voltage respond of the control system of AVR in direct current type with Proportional Integral Differential controller (PID) that fulfill design criteria in the parameter values are 0.0000 in steady state error to steps input unit,0.1307 second in rise time, 0.2793 seconds in peak, 2.2162 seconds time settling time, 1.1475 in peak value and 14.7500% in maximum overshoot.
Keywords: Automatic Voltage Regulator (AVR),
performance, error analysis, transition analysis
1. PENDAHULUAN
Energi listrik telah menjadi kebutuhan utama bagi industri hingga kebutuhan rumah tangga. Oleh karena itu diperlukan suatu pembangkit tenaga listrik yang kontinu pelayanannya sehingga dapat memenuhi kebutuhan konsumen. Pusat - pusat pembangkit listrik yang ada harus dapat selalu memenuhi kebutuhan beban yang berubah - ubah serta daya yang tersedia dalam sistem tenaga listrik haruslah cukup untuk memenuhi kebutuhan tenaga listrik dan pelanggan. permasalah yang terjadi dalam pengoperasi sistem tenaga listrik adalah daya yang dibangkitkan tidak sama dengan daya yang dikonsumsi oleh pemakai tenaga listrik karena daya yang tersedia
tergantung kepada daya yang terpasang pada unit - unit pembangkit dalam sistem dan dan juga tergantung dari kesiapan operasi unit tersebut.
Dalam pembangkitan tenaga listrik untuk di salurkan dan didistribusikan ke para konsumen, dibutuhkan sebuah generator sebagai peralatan utamanya. Hal yang sangat penting dalam proses pembangkitan tenaga listrik yaitu pada kestabilan kinerja generator dalam menyuplai daya ke sistem (beban). Proses pembangkitan tenaga listrik tersebut dipengaruhi oleh perubahan kebutuhan daya reaktif pada beban. Adanya perubahan daya reaktif yang terjadi sangat mempengaruhi kestabilan dari tegangan keluaran terminal yang dihasilkan oleh generator. Tegangan keluaran tersebut harus diubah-ubah agar generator tetap dalam keadaan stabil dalam mengkompensasi kebutuhan daya reaktif dari beban. Untuk Mengantisipasi hal tersebut digunakan sebuah peralatan yang dapat mengatur tegangan keluaran dari generator, yaitu dengan cara mengatur arus eksitasi pada generator secara otomatis, menggunakan sistem eksitasi generator. Pengaturan arus eksitasi secara otomatis tersebut dilakukan menggunakan AVR. AVR adalah suatu sistem yang digunakan untuk menjaga kestabilan tegangan keluaran dari generator yang bergantung pada eksitasi.
Ada beberapa tipe AVR diantaranya AVR tipe Arus Searah, AVR tipe Arus Searah dengan rate output
feedback, AVR tipe Arus Searah dengan transient gain reduction dan AVR tipe Arus statik [1]. Tipe – tipe AVR
ini mempuyai performansi dalam domain waktu dan domain frekuensi yang berbeda – beda. Untuk performansi dalam domain waktu terdiri dari analisa kesalahan dan analisa peralihan sedangkan untuk performansi dalam domain frekuensi terdiri dari performansi lingkar terbuka dalam domain frekuensi dan performansi lingkar tertutup dalam domain frekuensi. Untuk analisa kesalahan, sistem AVR tipe arus searah dengan Rate Output Feedback dan sistem AVR tipe statik memiliki nilai kesalahan yang terkecil [1]. Untuk analisa peralihan, untuk waktu naik, waktu puncak dan waktu keadaan mantap, model sistem AVR tipe statik memiliki nilai yang paling kecil dan untuk lewatan maksimum dan nilai puncak, model sistem AVRtipe arus searah dengan Transient Gain Reduction memiliki nilai
24
yang paling kecil [1]. Hasil analisa juga memperlihatkan bahwa sistem AVR tipe arus searah memiliki performansi dalam domain waktu dan domain frekuensi yang kurang memuaskan. Untuk itu dalam penelitian akan difokuskan pada perancangan dan analisa performansi dalam domain waktu dan domain frekuensi sistem AVR tipe arus searah.
Adapun beberapa penelitian yang sudah dilakukan berkaitan dengan penelitian ini diantaranya [2], membahas tentang analisa peralihan, analisa performansi dalam domain frekuensi dan analisa kekokohan dari sistem AVR tipe arus searah. Pengendali yang digunakan yaitu Proporsional Integral Diferensial (PID), Proporsional Integral Diferensial plus pengendali Diferensial orde 2 (PIDD2), Proporsional Integral Diferensial (PID) dengan algoritma Particle Swarm
Optimization (PSO) dan First Order Proporsional Integral
Diferensial (FOPID). Hasil dari penelitian dimana performansi dan kestabilan sistem AVR tipe arus searah dengan pengendali Proporsional Integral Diferensial plus pengendali Diferensial orde 2 (PIDD2) lebih stabil dan kokoh serta mempuyai performansi yang lebih baik. [3], membahas tentang perancangan pengendali Proporsional Integral Diferensial (PID) dengan algoritma Particle
Swarm Optimization (PSO). Analisa yang dilakukan
meliputi analisa peralihan dan analisa performansi dalam domain frekuensi untuk sistem lingkar terbuka. Berdasarkan penjelasan diatas maka dalam penelitian ini dilakukan perancangan dan analisa performansi sistem AVRtipe arus searah dengan pengendali berdasarkan pendekatan tanggapan frekuensi. Pengendali yang dirancang terdiri dari pengendali Proporsional (P), pengendali Proporsional Integral (PI), pengendali Proporsional Diferensial (PD) dan pengendali Proporsional Integral Diferensial (PID). Untuk analisa performansi meliputi analisa kesalahan dan analisa peralihan.
Tujuan dari penelitian ini untuk memperoleh informasi kesalahan dan peralihan dari tanggapan tegangan AVR tipe arus searah tanpa dan dengan pengendali berdasarkan pendekatan tanggapan frekuensi. Hasil dari penelitian ini diperolehnya informasi kesalahan dan peralihan serta nilai – nilai parameter pengendali yang digunakan untuk mengendalikan tanggapan tegangan AVR tipe arus searah berdasarkan tanggapan frekuensi. Untuk batasan masalah dalam penelitian ini adalah
1. Pada penelitian ini tidak membahas hubungan dengan pembebanan pada saluran.
2. Model sistem AVR yang dibahas adalah model sistemAVR tipe arus searah.
3. Sistem AVRdirepresentasikan dalam bentuk fungsi alih.
4. Perancangan dan analisa dilakukan dalam tahap simulasi dengan bantuan perangkat lunak Matlab. Adapun versi perangkat lunak Matlab yang digunakan adalah Matlab versi 12.
5. Komputer yang digunakan adalah komputer laptop merk Asus dengan spesifikasi prosesor Intel Core I5 5200 CPU 2.20 GHZ dan memori 4 GB.
2. TINJAUAN PUSTAKA
Pada bagian ini menjelaskan tentang pemodelan sistem AVR tipe arus searah, perancangan pengendalli, analisa kesalahan, analisa peralihan dan perancangan pengendali dengan pendekatan tanggapapan frekuensi. Untuk pemodelan matematis sistem AVR tipe arus searah meliputi pemodelan amplifier, pemodelan eksiter, pemodelan generator dan pemodelan sensor. Untuk pemodelan matematis amplifier dinyatakan dalam bentuk persamaan (1) berikut [4]
a A A G s=
K
1+ τ s
(1)Hasil pemodelan matematis amplifier berupa fungsi alih orde satu dengan 2 parameter yaitu konstanta penguatan amplifier dan konstanta waktu amplifier. Nilai konstanta penguatan amplifier memiliki rentang nilai dari 10.0000 sampai 40.000 sedangkan nilai konstanta waktu amplifier memiliki rentang nilai dari 0.0200 detik sampai 0.1000 detik [2]. Untuk pemodelan matematis eksiter dinyatakan dalam bentuk persamaan (2) berikut [4]
eE
E
G s
=
1+ τ s
K
(2) Hasil pemodelan matematis eksiter ini berupa fungsi alih orde satu dengan 2 parameter yaitu konstanta penguatan eksiter dan konstanta waktu eksiter. Nilai konstanta penguatan eksiter ini memiliki rentang nilai dari 1.0000 sampai 10.0000 dan nilai konstanta waktu eksiter memiliki rentang nilai dari 0.4000 sampai 1.0000 [2]. Untuk pemodelan matematis generator dinyatakan dalam bentuk persamaan (3) berikut [4]
GG
G
G s
=
1+ τ s
K
(3) Hasil pemodelan matematis generator ini berupa fungsi alih orde satu dengan 2 parameter yaitu konstanta penguatan generator dan konstanta waktu generator. Nilai konstanta penguatan generator memiliki rentang nilai dari 0.7000 sampai 1.0000 sedangkan nilai konstanta waktu generator memiliki nilai rentang nilai dari 1.0000 detik sampai 2.0000 detik pada keadaan beban nol sampai keadaan beban penuh [2]. Untuk pemodelan matematis sensor dinyatakan dalam bentuk persamaan (4) berikut [4]
s s sK
H s =
T s + 1
(4)25
GA GE GG S H ref V (s) V (s)e s V (s) t V (s)-Amplifier Eksiter Generator
Sensor
Gambar 1. Diagram Blok Sistem Automatic Voltage Regulator Tipe Arus Searah [4]
Hasil pemodelan matematis sensor ini berupa fungsi alih orde satu dengan 2 parameter yaitu konstanta penguatan sensor dan konstanta waktu sensor. Adapun nilai konstanta penguatan sensor memiliki rentang nilai dari 0.9000 sampai 1.1000 sedangkan nilai konstanta waktu sensor memiliki rentang nilai dari 0.0010 detik sampai 0.0600 detik [4].
Selanjutnya komponen – komponen sistem AVR tipe arus searah ini digabungkan dan terbentuk diagram blok dari sistem AVR tipe arus searah yang diperlihatkan pada Gambar 1. Berdasarkan diagram blok pada Gambar 1. kemudian diperoleh fungsi alih lingkar terbuka dan fungsi alih lingkar tertutup dari sistem AVR tipe arus searah.
Untuk fungsi alih lingkar terbuka diperlihatkan pada persamaan (5) dan fungsi alih lingkar tertutup diperlihatkan pada persamaan (6) berikut
a
e G
G s H s = G s G s G s H s (5)
a e G t ref a e G G s G s G s V (s) = V (s) 1 + G s G s G s H s (6) Untuk diagram blok sistem AVR tipe arus searah dengan pengendali diperlihatkan pada Gambar 2. Berdasarkan diagram blok pada Gambar 2. kemudian diperoleh fungsi alih lingkar terbuka dan fungsi alih lingkar tertutup dari sistem AVR tipe arus searah dengan pengendali. Untuk fungsi alih lingkar terbuka diperlihatkan pada persamaan (7) dan fungsi alih lingkar tertutup diperlihatkan pada persamaan (8) berikut
a e G
G s H s = C s G s G s G s H s (7)
a e G t ref a e G C s G s G s G s V (s) = V (s) 1 + C s G s G s G s H s (8) Pengendali yang digunakan diantaranya pengendali Proporsional (P), pengendali Proporsional Integral (PI), pengendali Proporsional Diferensial (PD) dan pengendali Proporsional Integral Diferensial (PID). Pengendali - pengendali tersebut dirancang dengan metoda tanggapan A G (s) G (s)E G (s)G S H (s) ref V (s) V (s)e s V (s) t V (s)
-Amplifier Eksiter Generator
Sensor
C(s)
Pengendali
Gambar 2. Diagram Blok Sistem Automatic Voltage Regulator Tipe Arus Searah Dengan Pengendali[4]
frekuensi. Untuk fungsi alih pengendali Proporsional (P) diperlihatkan pada
persamaan (9) berikut [5]
pC s = K (9)
Untuk fungsi alih pengendali Proporsional Integral (PI) diperlihatkan pada persamaan (10) berikut [5]
i p K C s = K s (10)Fungsi alih pengendali Proporsional Diferensial (PD) diperlihatkan pada persamaan (11) berikut [5]
p DC s = K
Ks
(11) Fungsi alih pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada persamaan (12) berikut [5]
D i p K C s = K K s s (12)dimana Kp adalah konstanta Proporsional, Ki adalah konstanta integral dan Kd adalah konstanta diferensial. Untuk analisa kesalahan parameter yang diamati adalah tipe sistem, konstanta kesalahan posisi, konstanta kesalahan kecepatan, konstanta kesalahan posisi, kesalahan keadaan mantap terhadap masukan undak satuan, kesalahan keadaan mantap terhadap masukan laju satuan dan kesalahan keadaan mantap terhadap masukan parabola satuan [6]. Untuk menentukan tipe sistem dilakukan dengan menggunakan persamaan (13) berikut
1 2 m N 1 2 k K(s z )(s z ) (s z ) G(s)H(s) s (s p )(s p ) (s p ) (13) Fungsi alih pada persamaan (11) melibatkan bentuk pada penyebutnya dimana menyatakan pole rangkap N di titik asal. Pola klasifikasi
n
26
-+ R(s) E(s) G(s) C(s) H(s) B(s)Gambar 3. Diagram Blok Sistem Kendali[5]
yang sekarang ini didasarkan pada banyaknya integrasi yang ditunjukkan oleh fungsi alih lingkar terbuka. Sistem disebut tipe 0, tipe 1, tipe 2…..masing-masing jika
N = 0
,N = 1
,N = 2
…… Jika angka tipe diperbesar maka ketelitian menjadi semakin baik akan tetapi membesarnya angka tipe akan memperburuk persoalan kestabilan. Kompromi antara ketelitian keadaan mantap dan kestabilan relatif selalu diperlukan. Untuk konstanta kesalahan posisi, konstantan kesalahan kecepatan dan konstanta kesalahan percepatan diperlihatkan pada persamaan (14) s/d (16) berikutp s 0 K lim G(s)H(s) G(0)H(0) (14) v s 0 K = lim G(s)H(s) sG(0)H(0)
s
(15) a s 0 2 2 K = lim G(s)H(s)s
s
G(0)H(0) (16)Untuk kesalahan keadaan mantap terhadap masukan undak satuan diperlihatkan pada persamaan (17) berikut ss p 1 e 1 + K (17)
Untuk kesalahan keadaan mantap terhadap masukan laju satuan diperlihatkan pada persamaan (18) berikut V ss 1 e K (18)
Untuk kesalahan keadaan mantap terhadap masukan laju satuan diperlihatkan pada persamaan (19) berikut ss a 1 e K (19)
Konstanta kesalahan posisi, konstanta kesalahan kecepatan dan konstanta kesalahan percepatan menggambarkan kemampuan sistem untuk memperkecil atau menghilangkan kesalahan keadaan mantap. Untuk itu, koefesien-koefesien tersebut merupakan indikasi performansi kesalahan keadaan mantap. Biasanya diinginkan untuk memperbesar koefesien kesalahan dengan menjaga tanggapanperalihan dalam daerah yang
masih dapat diterima. Selain itu untuk memperbaiki performansi keadaan mantap,dapat dilakukan dengan menaikkan tipe sistem dengan menambah satu integrator atau lebih pada lintasan umpan maju.
Untuk analisa peralihan, parameter yang diamati adalah waktu naik, waktu puncak, waktu keadaan mantap, nilai puncak dan lewatan maksimum [6]. Untuk penentuan parameter – parameter tanggapan peralihan ini ditinjau sistem yang diperlihatkan pada Gambar 3.
Berdasarkan diagram blok pada Gambar 3. Diperoleh persamaan (20) berikut
C s G s = R s 1 + G s H s (20) Pada umumnyaG s
danH s
diberikan sebagai rasio polinomial dalam s yang diperlihatkan pada persamaan (21) dan (22) berikut
p s G s q s (21)
n s H s = d s (22)dimana
p s
,q s
,n s
dand s
adalah polinomial dalam s. Fungsi alih lingkar tertutup yang diberikan oleh persamaan (20) selanjutnya dapat dinyatakan dalam bentuk persamaan (23) dan (24).
C s p s d s = R s q s d s + p s n s (23)
m m-1 o 1 m-1 m n n-1 o 1 n-1 n C s b s + b s +…+ b s + b = R s a s + a s +…+ a s + a (24)Untuk menentukan tanggapan peralihan sistem pada persamaan (23) atau persamaan (24)terhadap setiap masukan yang diberikan perlu diuraikan persamaan polinomial tersebut atas faktor-faktornya. Setelah persamaan polinomial diuraikan atas faktor-faktornya maka persamaan (23) atau (24) dapat ditulis dalam bentuk persamaan (25) berikut
1 2 m 1 2 n k s + z s + z s + z C s = R s s + p s + p s + p (25) Selanjutnya akan diuji perilaku tanggapan sistem ini terhadap masukan undak satuan. Diasumsikan bahwa pole-pole lingkar tertutup berbeda satu sama lain. Untuk27
masukan undak satuan persamaan (25) dapat dinyatakandalam bentuk persamaan (26) berikut
n i i=1 i a a C s s s + p
(26)dimana
a
i adalah residu dari pole dis = -p
i. Jika semua pole lingkar tertutup terletak disebelah kiri sumbu khayal bidang s maka besar relatif dari residu menentukan kepentingan relatif dari komponen-komponenC s
dalam bentuk uraian tersebut. Jika ada suatu zero lingkar tertutup mempuyai harga yang hampir sama dengan suatu pole lingkar tertutup maka residu pada pole ini adalah kecil dan koefesien suku tanggapan peralihan yang berkaitan dengan pole ini menjadi kecil. Sepasang pole dan zero yang letaknya berdekatan secara efektif akan saling menghilangkan. Jika suatu pole terletak sangat jauh dari titik asal maka residu pada pole ini mungkin kecil. Tanggapan peralihan yang ditimbulkan oleh pole yang jauh ini adalah kecil dan berlangsung dalam waktu yang singkat. Suku-sukuC s
dalam bentuk uraian yang mempuyai residu sangat kecil memberikan kontribusi yang kecil pada tanggapan peralihan sehingga suku-suku ini dapat diabaikan. Jika ini dilakukan maka sistem orde tinggi dapat didekati dengan sistem berorde rendah. Pole-pole dariC s
terdiri dari pole-pole nyata dan pasangan-pasangan pole konjugasi kompleks. Sepasang pole konjugasi kompleks menghasilkan bentuk orde kedua dalam s. Bentuk uraian faktor dari persamaan karakteristik orde tinggi terdiri dari bentuk orde pertama dan orde kedua diperlihatkan pada persamaan (27) berikut
m i i=1 q r 2 2 j k k k j=1 k=1 K s + z C s = R s s s + p s + 2ς ω s + ω
(27)Dimana q + 2r = n. Jika pole-pole lingkar tertutup mempuyai harga yang berbeda-beda satu sama lain maka persamaan (27) dapat diuraikan menjadi pecahan parsial yang dinyatakan dalam bentuk persamaan (28) berikut
n j r k
k k
k k 2k 2 2 j=1 j k=1 k k k a b s + ς ω c ω 1 ς a C s = s s + p s + 2ς ω s + ω
(28) Berdasarkan persamaan (28) dapat dilihat bahwa tanggapan sistem orde tinggi tersusun dari beberapabentuk yang melibatkan fungsi-fungsi sederhana yang dijumpai pada tanggapan sistem orde pertama dan kedua. Selanjutya tanggapan sistem terhadap undak satuan c (t) didapatkan dengan menggunakan transformasi Laplace balik dari c(s) dalam bentuk persamaan (29) berikut
j k k k k n r r -p t -ς ω t 2 -ς ω t 2 j k k k k k k j=1 k=1 k=1c t = a
a e
b e cos ω 1 ς t
b e sin ω 1 ς t
untukt 0
(29)Jika semua pole-pole lingkar tertutup berada disebelah kiri sumbu khayal bidang s maka suku-suku ekspoensial dansuku-suku eksponensial teredam pada persamaan (29) mendekati nol dengan membesarnya waktu t. Selanjutnya keluaran keadaan mantapnya adalah
c
= a
3. METODE PENELITIAN
Bagian ini menjelaskan data – data parameter sistem AVR tipe arus searah, kriteria perancangan dan prosedur analisa performansi tanggapan tegangan sistem AVR tipe arus searah dalam domain waktu dengan pendekatan tanggapan frekuensi.
A. Data-Data Parameter Sistem AVR Tipe Arus Searah
Parameter-parameter sistem AVR tipe arus searah yang digunakan dalam penelitian ini diperlihatkan pada Tabel 1 [2].
Data – data pada Tabel 1 kemudian disubstitusikan ke persamaan (3) s/d (8) dan diperoleh fungsi alih lingkar terbuka dan lingkar tertutup sistem AVR tipe arus searah tanpa pengendali yang dinyatakan dalam bentuk persamaan (30) dan (31) berikut
4 3 10.00002 G s H s = 0.0004s + 0.0454s + 0.5550s + 1.5100s + 1.0000 (30)
t ref V 10.0000(1+0.0100s) = V (1+0.1000s)(1+0.4000s)(1+1.0000s)(1+0.0100s)+10.0000s
s
(31) B. Kriteria PerancanganAdapun kriteria perancangan yang digunakan untuk perancangan pengendali sebagai berikut
1. Nilai kesalahan keadaan mantap kurang dari 0.0500.
2. Waktu naik kurang dari 0.2500 detik. 3. Waktu puncak 0.5000 detik.
4. Waktu keadaan mantap kurang dari 2.5000 detik 5. Lewatan maksimum kurang dari 20.0000 %. C. Prosedur Analisa Performansi dalam Domain
28
Penelitian ini dimulai dengan pemodelan matematis sistem AVR tipe arus searah. Pemodelan matematis untuk sistem sistem AVR tipe arus searah ini terdiri dari beberapa komponen diantaranya pemodelan amplifier, pemodelan eksiter, pemodelan generator dan pemodelan sensor. Pemodelan matematis AVR tipe arus searah ini menggunakan persamaan linear diferensial dan transformasi Laplace. Hasil pemodelan masing – masing komponen ini berupa fungsi alih orde satu. Fungsi alih dari masing-masing komponen ini kemudian digabungkan dan diperoleh fungsi alih lingkar terbuka dan fungsi alih lingkar tertutup. Adapun keluaran yang diamati adalah tanggapan tegangan sistem AVR tipe arus searah dan masukan adalah tanggapan tegangan referensi. Setelah diperoleh fungsi alih lingkar terbuka dan fungsi alih lingkar tertutup dari tanggapan tegangan sistem AVR tipe arus searah kemudian dilakukan substitusi nilai – nilai parameter setiap komponen. Adapun nilai – nilai parameter dari sistem AVR tipe arus searah diperlihatkan pada Tabel 1 sehingga diperoleh fungsi alih lingkar terbuka dan fungsi alih lingkar tertutup. Untuk fungsi alih lingkar terbuka secara lengkap diperlihatkan pada persamaan (30) dan untuk fungsi alih lingkar tertutup diperlihatkan pada persamaan (31). kriteria perancangan pengendali. Adapun kriteria perancangan pengendali diperlihatkan pada bagian b dari bagian 3 ini. Setelah diperolehnya fungsi alih lingkar terbuka dan fungsi alih lingkar tertutup dari sistem AVR tipe arus searah secara lengkap kemudian dilakukan dilakukan analisa performansi tanggapan tegangan sistem AVR tipe arus searah tanpa pengendali dalam domain waktu. Analisa yang dilakukan meliputi analisa kesalahan dan analisa peralihan. Analisa kesalahan dilakukan dengan menggunakan persamaan (30) dengan parameter yang diamati meliputi tipe sistem, konstanta kesalahan posisi, konstanta kesalahan kecepatan, konstanta kesalahan percepatan, kesalahan keadaan mantap untuk masukan undak satuan, kesalahan keadaan mantap untuk masukan laju satuan, kesalahan keadaan mantap untuk masukan parabolik. Untuk analisa peralihan parameter dilakukan dengan menggunakan persamaan (31) dengan parameter yang diamati meliputi waktu naik, waktu puncak, waktu keadaan mantap, nilai puncak dan lewatan maksimum. Berdasarkan hasil analisa kesalahan dan analisa peralihan tanpa pengendali ini kemudian ditentukan kriteria perancangan pengendali.
Adapun kriteria perancangan pengendali diperlihatkan pada bagian b dari bagian 3 ini Selanjutnya dilakukan perancangan pengendali tanggapan tegangan sistem AVR tipe arus searah dengan pendekatan tanggapan frekuensi berdasarkan kriteria perancangan. Pengendali yang dirancang terdiri dari pengendali Proporsional (P),
TABEL 1
NILAI PARAMETER AVR TIPE ARUS SEARAH
Parameter Nilai a
K
10.0000 aT
0.1000 eK
1.0000 eT
0.4000 gK
1.0000 gT
1.0000 sK
1.0000 sT
0.0100pengendali Proporsional Integral (PI), pengendali Proporsional Diferensial (PD) dan pengendali Proporsional Integral Diferensial (PID). Perancangan pengendali ini dilakukan dengan menggunakan persamaan fungsi alih lingkar terbuka yang diperlihatkan pada persamaan (30) dan mengubah - ubah masukan nilai margin fasa.
Hasil dari perancangan diperolehnya fungsi alih untuk masing – masing pengendali., fungsi alih lingkar terbuka dengan pengendali dan fungsi alih lingkar tertutup dengan pengendali. Untuk fungsi alih pengendali Proporsional (P) diperlihatkan pada persamaan (32), fungsi alih lingkar terbuka dengan pengendali Proporsional (P) diperlihatkan pada persamaan (33) dan fungsi alih lingkar tertutup dengan pengendali Proporsional (P) diperlihatkan pada persamaan (34).
Untuk fungsi alih pengendali Proporsional Diferensial (PD) diperlihatkan pada persamaan (35), fungsi alih lingkar terbuka dengan pengendali Proporsional Diferensial (PD) diperlihatkan pada persamaan (36) dan fungsi alih lingkar tertutup dengan pengendali Proporsional Diferensial (PD) diperlihatkan pada persamaan (37).
Untuk fungsi alih pengendali Proporsional Integral (PI) diperlihatkan pada persamaan (38), fungsi alih lingkar terbuka dengan pengendali Proporsional Integral (PI) diperlihatkan pada persamaan (39) dan fungsi alih lingkar tertutup dengan pengendali Proporsional Integral (PI) diperlihatkan pada persamaan (40). Untuk fungsi alih pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada persamaan (41), fungsi alih lingkar terbuka dengan pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada persamaan (42) dan fungsi alih lingkar tertutup dengan pengendali
29
TABEL 2
HASIL ANALISA KESALAHAN
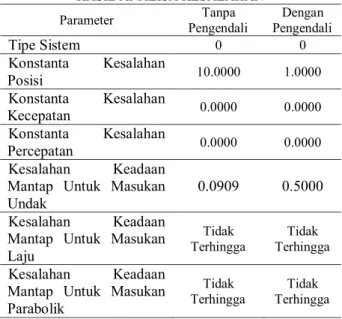
Parameter Pengendali Tanpa Pengendali Dengan
Tipe Sistem 0 0 Konstanta Kesalahan Posisi 10.0000 0.8000 Konstanta Kesalahan Kecepatan 0.0000 0.0000 Konstanta Kesalahan Percepatan 0.0000 0.0000 Kesalahan Keadaan Mantap Untuk Masukan
Undak 0.0909 0.5556
Kesalahan Keadaan Mantap Untuk Masukan Laju
Tidak
Terhingga Terhingga Tidak
Kesalahan Keadaan Mantap Untuk Masukan Parabolik
Tidak Terhingga
Tidak Terhingga
Proporsional Integral Diferensial (PID) diperlihatkan pada persamaan (43).
Setelah diperolehnya fungsi alih pengendali, fungsi alih lingkar terbuka dengan pengendali dan fungsi alih lingkar tertutup dengan pengendali maka dilakukan analisa performansi tanggapan tegangan sistem AVR tipe arus searah dengan pengendali dalam domain waktu. Analisa yang dilakukan sama dengan analisa performansi tanggapan tegangan sistem AVR tipe arus searah tanpa pengendali dalam domain waktu yang terdiri dari analisa kesalahan dan analisa peralihan. Hasil analisa performansi tanggapan tegangan sistem AVR tipe arus searah dengan pengendali dalam domain waktu ini kemudian dibandingkan dengan hasil analisa performansi tanggapan tegangan sistem AVR tipe arus searah tanpa pengendali dalam domain waktu dengan menggunakan kriteria perancangan. Hasil dari perbandingan ini diperoleh pengendali yang memenuhi kriteria perancangan untuk meningkatkan performansi tanggapan tegangan sistem AVR tipe arus searah dalam domain waktu.
4. HASIL DAN PEMBAHASAN
Pada bagian ini dilakukan analisa performansi tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali dalam domain waktu. Analisa performansi yang dilakukan terdiri dari analisa kesalahan dan analisa peralihan. Untuk pengendali terdiri dari pengendali Proporsional (P), pengendali Proporsional Integral (PI), pengendali Proporsional Diferensial (PD) dan pengendali Proporsional Integral Diferensial (PID).
Untuk fungsi alih pengendali Proporsional (P) diperlihatkan pada persamaan (32) berikut
C s = 0.4000 (32) Untuk fungsi alih lingkar terbuka dan tertutup tanggapan tegangan sistem AVR tipe arus searah dengan pengendali Proporsional (P) diperlihatkan pada persamaan (33) dan (34). Hasil analisa kesalahan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali
s H s = 4 3 4.0000 2 0.0004s + 0.0454s + 0.5550s + 1.5100s + 1.0000G
(33)
t 4 3 2 ref V 4.0000 = V 0.0004s + 0.0454s + 0.5550s + 1.5100s + 5.0000s
s
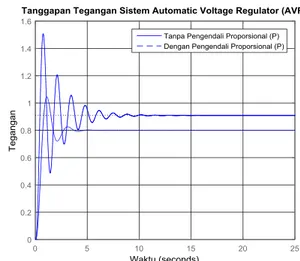
(34) Proporsional (P) diperlihatkan pada Tabel 2. Untuk hasil analisa peralihan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional (P) diperlihatkan pada Tabel 3. Tanggapan peralihan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional (P) diperlihatkan pada Gambar 4.Untuk fungsi alih pengendali Proporsional Diferensial (PD) diperlihatkan pada persamaan (35).
C s = 1.0094 + 0.2449s
(35)Dengan nilai margin fasa sebesar 54.0000 derjat pada frekuensi 5.8500 rad/detik. Untuk fungsi alih lingkar terbuka dan tertutup tanggapan tegangan sistem AVR tipe arus searah dengan pengendali Proporsional Diferensial (PD) diperlihatkan pada persamaan (36) dan (37) berikut
s H s = 4 2.4490s 10.09003 2 0.0004s + 0.0454s + 0.5550s + 1.5100s + 1.0000G
(36)
t 4 3 2 ref V 2.4490s +10.0900 = V 0.0004s + 0.0454s + 0.5550s + 3.9590s + 11.0900s
s
(37) Hasil analisa kesalahan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Diferensial (PD) diperlihatkan pada Tabel 4.Untuk hasil analisa peralihan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Diferensial (PD) diperlihatkan pada Tabel 5. Tanggapan peralihan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Diferensial (PD) diperlihatkan pada
30
Gambar 5. Untuk fungsi alih pengendali Proporsional Integral (PI) diperlihatkan pada persamaan (38) berikut
0.0952
C s = 0.3557 +
s (38)
Dengan nilai margin fasa sebesar 49.0000 derjat pada frekuensi 2.3400 rad/detik. Untuk fungsi alih lingkar terbuka dan tertutup tanggapan tegangan sistem AVR tipe arus searah dengan pengendali Proporsional Integral (PI) diperlihatkan pada persamaan (39) dan (40) berikut
s H s = 5 3.5570s 0.95174 3 2 0.0004s + 0.0454s + 0.5550s + 1.5100s + sG
(39)
t 5 4 3 2 ref V 3.5570s 0.9517 = V 0.0004s + 0.0454s + 0.5550s + 1.5100s + 4.5570s + 0.9517s
s
(40) Hasil analisa kesalahan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Integral (PI) diperlihatkan pada Tabel 6.Untuk hasil analisa peralihan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Integral (PI) diperlihatkan pada Tabel 7. Tanggapan peralihan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Integral (PI) diperlihatkan pada Gambar 6.
Untuk fungsi alih pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada persamaan (41) berikut Dengan nilai margin fasa sebesar 50.0000 derjat pada frekuensi 10.0000 rad/detik.
2.0000
C s = 0.9249 +
0.6016s
s
(41)Untuk fungsi alih lingkar terbuka dan tertutup tanggapan tegangan sistem AVR tipe arus searah dengan pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada persamaan (42) dan (43) berikut
s H s = 5 2 4 3 2 G6.0160s 9.2500s 20.0000
0.0004s + 0.0454s + 0.5550s + 1.5100s + s
(42)
2 t 5 4 3 2 ref V = V s 6.0160s 9.2500s 20.0000 s 0.0004s + 0.0454s + 0.5550s + 7.5260s +10.2500s + 20.0000 (43) TABEL 3HASIL ANALISA PERALIHAN
Parameter Pengendali Tanpa Pengendali Dengan
Waktu naik 0.2607 detik 0.4398 detik Waktu puncak 0.7522 detik 1.1021 detik Nilai puncak 1.5066 1.0460 Lewatan maksimum 65.7226 % 30.7530 % Waktu keadaan
mantap 6.9865 detik 3.4128 detik
Gambar 4. Tanggapan Peralihan Tegangan Sistem AVR Tipe Arus Searah
TABEL 4
HASIL ANALISA KESALAHAN
Parameter Pengendali Tanpa Pengendali Dengan
Tipe Sistem 0 0 Konstanta Kesalahan Posisi 10.0000 0.8000 Konstanta Kesalahan Kecepatan 0.0000 10.9000 Konstanta Kesalahan Percepatan 0.0000 0.0000 Kesalahan Keadaan Mantap Untuk Masukan
Undak 0.0909 0.0902
Kesalahan Keadaan Mantap Untuk Masukan Laju Tidak Terhingga Tidak Terhingga Kesalahan Keadaan Mantap Untuk Masukan Parabolik Tidak Terhingga Tidak Terhingga TABEL 5
HASIL ANALISA PERALIHAN
Parameter Tanpa Pengenda
li
Dengan Pengend
ali
Waktu naik 0.2607 detik 0.2012 detik Waktu puncak 0.7522 detik 0.4726 detik Nilai puncak 1.5066 1.0918 Lewatan maksimum 65.7226 % 19.9968 % Waktu keadaan
31
Gambar 5. Tanggapan Peralihan Tegangan Sistem AVR Tipe Arus Searah
TABEL 6
HASIL ANALISA KESALAHAN
Parameter Pengendali Tanpa Pengendali Dengan
Tipe Sistem 0 0 Konstanta Kesalahan Posisi 10.0000 1.0000 Konstanta Kesalahan Kecepatan 0.0000 0.0000 Konstanta Kesalahan Percepatan 0.0000 0.0000 Kesalahan Keadaan Mantap Untuk Masukan Undak
0.0909 0.5000 Kesalahan Keadaan
Mantap Untuk Masukan Laju Tidak Terhingga Tidak Terhingga Kesalahan Keadaan Mantap Untuk Masukan Parabolik
Tidak
Terhingga Terhingga Tidak
TABEL 7
HASIL ANALISA PERALIHAN
Parameter Pengendali Tanpa Pengendali Dengan
Waktu naik 0.2607 detik 0.5710 detik Waktu puncak 0.7522 detik 1.1903 detik Nilai puncak 1.5066 1.1121 Lewatan maksimum 65.7226 % 11.2098 % Waktu keadaan
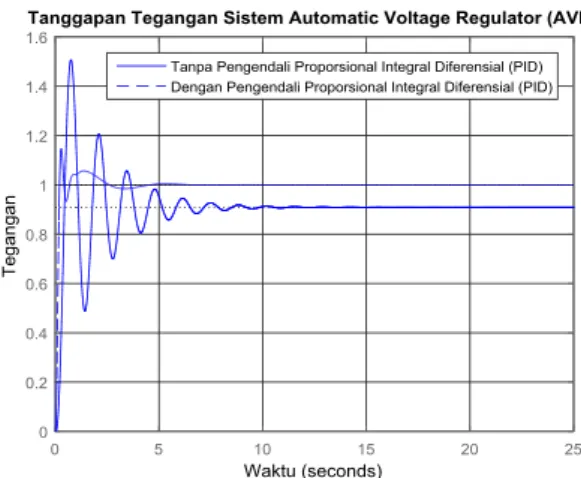
mantap 6.9865 detik 9.6465 detik Hasil analisa kesalahan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada Tabel 8.Untuk hasil analisa peralihan tanggapan tegangan sistem AVR tipe arus searah tanpa dan dengan pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada Tabel 9. Tanggapan peralihan tegangan sistem AVR tipe arus searah tanpa dan dengan
Gambar 6. Tanggapan Peralihan Tegangan Sistem AVR Tipe Arus Searah
TABEL 8
HASIL ANALISA KESALAHAN
Parameter Pengendali Tanpa Pengendali Dengan
Tipe Sistem 0 1
Konstanta Kesalahan
Posisi 10.0000 Terhingga Tidak Konstanta Kesalahan
Kecepatan 0.0000 20.0000 Konstanta Kesalahan
Percepatan 0.0000 0.0000
Kesalahan Keadaan Mantap Untuk Masukan
Undak 0.0909 0.0000
Kesalahan Keadaan Mantap Untuk Masukan Laju
Tidak
Terhingga 0.0500 Kesalahan Keadaan
Mantap Untuk Masukan Parabolik Tidak Terhingga Tidak Terhingga TABEL 9
HASIL ANALISA PERALIHAN
Parameter Pengendali Tanpa Pengendali Dengan Waktu naik 0.2607 detik 0.1307 detik Waktu puncak 0.7522 detik 0.2793 detik Nilai puncak 1.5066 1.1475 Lewatan maksimum 65.7226 % 14.7500 % Waktu keadaan
mantap 6.9865 detik 2.2162 detik pengendali Proporsional Integral Diferensial (PID) diperlihatkan pada Gambar 7. Tanggapan tegangan sistem AVR tipe arus searah dengan pengendali Proporsional (P) dan pengendali Proporsional Integral (PI) belum memenuhi kriteria perancangan terutama untuk nilai kesalahan keadaan mantap, nilai waktu naik, nilai waktu puncak, nilai waktu keadaan mantap, nilai puncak dan nilai lewatan masimum. Untuk pengendali
32
Gambar 7. Tanggapan Peralihan Tegangan Sistem AVR Tipe Arus Searah
Proporsional Diferensial (PD), tanggapan tegangan sistem AVR tipe arus searah juga tidak memenuhi kriteria perancangan terutama untuk kesalahan keadaan mantap. Untuk pengendali Proporsional Integral Diferensial (PID), tanggapan tegangan sistem AVR tipe arus searah sudah memenuhi kriteria perancangan.
5. KESIMPULAN
A. Kesimpulan
Adapun kesimpulan dari penelitian ini sebagai berikut
1. Tanggapan tegangan sistem AVR tipe arus searah dengan pengendali Proporsional Integral Diferensial (PID) memiliki performansi dalam domain waktu yang lebih baik dan memenuhi kriteria perancangan yang diinginkan dibandingkan dengan pengendali lainnya. Adapun parameter PID yang digunakan adalah Kpsebesar 0.9249, Ki sebesar 2.0000 dan Kd sebesar 0.6016.
2. Adapun parameter yang dipenuhi sesuai dengan kriteria perancangan sebagai berikut kesalahan keadaan mantap terhadap masukan undak satuan sebesar 0.0000, nilai waktu naik sebesar 0.1307 detik,
nilai waktu puncak sebesar 0.2793 detik, nilai waktu keadaan mantap sebesar 2.2162 detik, nilai puncak sebesar 1.1475 dan lewatan maksimum sebesar 14.7500 %.
B. Saran
Beberapa saran yang dapat dilakukan dalam penelitian selanjutnya adalah
1. Selain analisa performansi dalam domain waktu, hendaknya juga dilakukan analisa performansi dalam domain frekuensi, analisa kestabilan, analisa kekokohan, analisa sensitivitas dan analisa waktu tunda.
2. Pada analisa kekokohan, pengaruh ketidakpastian hendaknya juga dimasukkan sehinga nantinya tanggapan tegangan sistem tipe arus searah memiliki performansi nominal, kestabilan nominal, performansi kokoh dan kestabilan kokoh yang lebih yang baik.
UCAPAN TERIMA KASIH
Ucapan terima kasih kami sampaikan kepada Ketua Jurusan Teknik Elektro dan Dekan Fakultas Teknik Universitas Andalas yang telah menfasilitasi penelitian ini.
REFERENSI
[1] Graham, R, “Power System Oscillations”, Kluwer Academic Publisher, Massachusetts, 1999
[2] Sahib, M, “A Novel Optimal PID Plus Second Oder
Drivative Cntroller for AVR system”,Engineering Science and Technology, 18(2), 194 – 206, 2015
[3] Bhatt, V. K., & Bhongade, S, “Design of PID
Controller In Automatic Voltage Regulator (AVR) Using PSO Technique”,International Journal of Engineering Research and Applications, 1480 –
1485, 2013
[4] Saadat, H, “Power System Analysis”, McGraw Hill, New York, 1999
[5] Franklin, G., Powell , J., & Naeini , A. E., “Feedback
Control of Dynamics Systems”, Wesley Publishing
Company, New York, 1986
[6] Ogata, K., “Modern Control Engineering” ,Prentice – Hall, New York, 1992
![Gambar 2. Diagram Blok Sistem Automatic Voltage Regulator Tipe Arus Searah Dengan Pengendali[4]](https://thumb-ap.123doks.com/thumbv2/123dok/4209147.2858877/3.893.95.412.108.244/gambar-diagram-sistem-automatic-voltage-regulator-searah-pengendali.webp)
![Gambar 3. Diagram Blok Sistem Kendali[5]](https://thumb-ap.123doks.com/thumbv2/123dok/4209147.2858877/4.893.106.409.120.224/gambar-diagram-blok-sistem-kendali.webp)