Abstrak— Penelitian ini menggunakan prototipe mesin CNC yang belum memiliki kontroler apapun yang tertanam di dalamnya, sehingga gerakan tool pada prototipe ini hanya dapat bergerak dalam lingkup yang terbatas dan tidak sempurna jika terjadi perubahan beban. Adanya perbedaan torsi dan perubahan kecepatan pada spindle ketika pertama kali menyentuh benda kerja baik menyebabkan permukaan benda menjadi tidak rata. Hal ini mengakibatkan hasil pembentukan benda kerja tidak sesuai dengan yang diharapkan. Oleh karena itu, digunakanlah kontroler adaptif Self Tunning Regulator (STR) yang mampu menyesuaikan parameter kontroler terhadap perubahan parameter plant. Berdasarkan hasil pengujian kontroler, respon kontroler mampu mengikuti referensi dimana sudah tidak terdapat error steady state namun pada respon kontroler memiliki nilai tr yang lebih lambat daripada referensi yaitu sebesar 5,7 detik. Kemudian pada pengujian terhadap gangguan sebesar 0,0001 dengan waktu sampel 0,5 detik juga didapatkan bahwa respon kontroler dapat beradaptasi terhadap gangguan sesuai dengan referensi yang diberikan. Dimana nilai τ pada kondisi minimal, nominal, dan maksimal sebesar 152,4 detik, 152,7 detik, dan 153,3 detik memiliki respon yang lebih cepat daripada respon kontroler saat tidak diberi gangguan. Pada tahap implementasi, tidak bisa menggunakan kontroler PID-STR dikarenakan program Real-Time Windows Target pada MATLAB tidak bisa menjalankan program dalam bentuk m-file. Sehingga pada tahap implementasi hanya menggunakan kontroler PID biasa.
Kata Kunci—Mesin CNC, CNC Milling, Spindle, Self Tunning Regulator
I. PENDAHULUAN
ESIN CNC (Computer Numerical Control) merupakan mesin perkakas otomatis yang dilengkapi dengan sistem mekanik dan kontrol yang dilakukan oleh komputer melalui sebuah program. Komputer tersebut memberi instruksi ke mesin CNC agar bekerja sesuai dengan program sehingga dapat menghasilkan pola atau bentuk material sesuai dengan yang diinginkan.
Permasalahan yang sering terjadi pada proses face
milling yaitu ketika spindle mengenai benda kerja pertama kali.
Adanya perbedaan torsi dan perubahan kecepatan pada spindle
ketika pertama kali menyentuh benda kerja baik dari arah atas maupun samping benda kerja menyebabkan permukaan benda menjadi tidak rata. Hal ini mengakibatkan hasil pembentukan benda kerja tidak sesuai dengan yang diharapkan.
Oleh karena itu, digunakanlah kontroler Self Tunning
Regulator. Dimana fungsi penghantar dari nilai hasil
pembacaan tachogenerator dibandingkan dengan kecepatan referensi menjadi sinyal error (e(t)) untuk diolah oleh kontroler STR. Pada kontroler Self Tunning Regulator
menggunakan kontroler PID untuk menghindari adanya osilasi pada sinyal respon sistem. Kontroler ini memberikan sinyal kontrol ke aktuator sesuai dengan hasil pengolahan dengan sinyal error (e(t)). Sinyal kontrol juga diperlukan untuk mencari estimasi parameter plant dengan menggunakan metode Recursive Least Square. Hasil dari estimasi ini digunakan sebagai mekanisme pencarian parameter kontroler PID. Estimasi parameter kontroler ini diperlukan agar plant
dapat menyesuaikan dengan efek pembebanan yang diberikan. II. DASARTEORI
A. Mesin computer numerical controller (cnc)
Mesin CNC yang digunakan ditunjukkan pada Gambar 2.1 yaitu mesin buatan Feedback tipe CNC Mill 35-005-C. Mesin ini menggunakan 3 motor stepper dan 2 motor DC yang masing-masing menggerakkan spindle dan vice, 3 motor
stepper yang masing-masing menggerakkan sumbu X, Y, dan
Z, mata pahat (tool), dan meja kerja [1].
Mesin ini tidak memiliki sensor pengukuran sehingga dalam proses pengambilan data digunakan sensor tambahan yaitu sensor arus yang dipasang seri dengan motor dan sensor tachogenerator yang dikopel dengan motor spindle. Mesin ini sudah dilengkapi dengan sistem keamanan yaitu tombol
emergency stop yang berfungsi untuk keamanan.
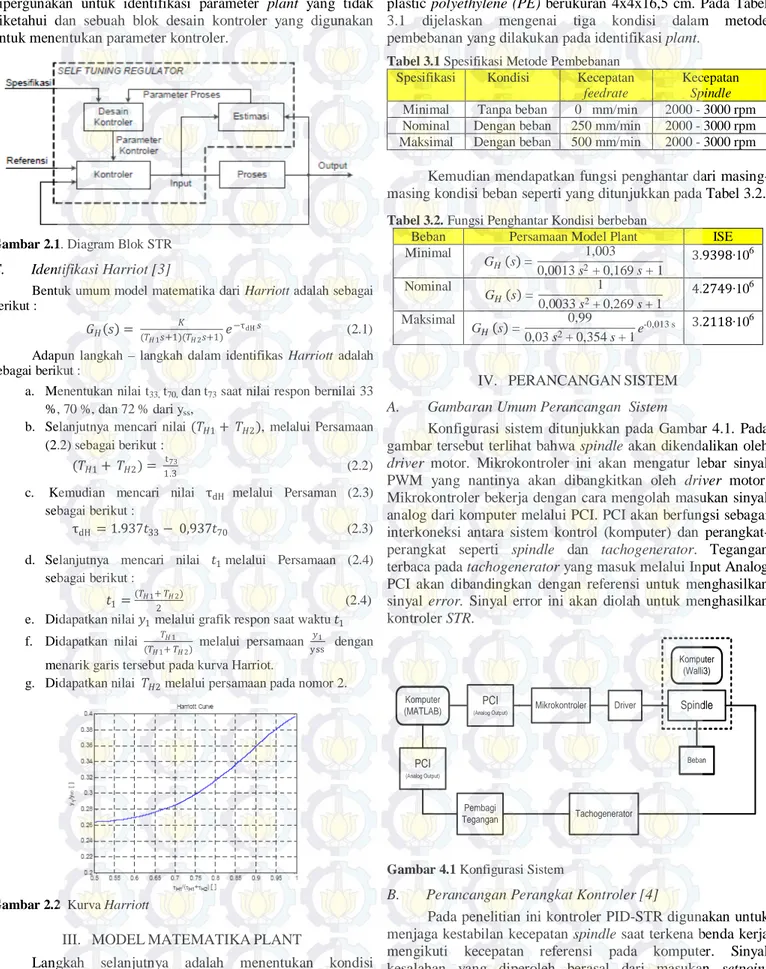
B. Self Tunning Regulator (STR)[2]
Self Tunning Regulator (STR) merupakan salah satu dari
mekanisme kontroler adaptif. Dimana parameter kontroler beradaptasi mengikuti perubahan parameter plant sehingga spesifikasi respon sistem total tetap sesuai dengan keinginan desain. Diagram blok sistem STR ditunjukkan pada Gambar 2.1.Dapat dilihat bahwa diagram blok STR terdiri dari dua
loop. loop yang pertama adalah loop umpan balik pada umumnya. Sedangkan loop yang kedua adalah loop yang menuju pada blok estimator parameter rekursif yang
Perancangan Kontroler
Self Tunning Regulator
Untuk Mempertahankan Kecepatan
Spindle
Saat
Proses
Face Milling
Pada Mesin Berbasis CNC
(Computer Numerical Control)
Eka Meidhasani S., Ir. Josaphat Pramudijanto, M.Eng, Eka Iskandar, ST., MT. Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]
dipergunakan untuk identifikasi parameter plant yang tidak diketahui dan sebuah blok desain kontroler yang digunakan untuk menentukan parameter kontroler.
Gambar 2.1. Diagram Blok STR
C. Identifikasi Harriot [3]
Bentuk umum model matematika dari Harriott adalah sebagai berikut :
𝐺𝐺𝐻𝐻(𝑠𝑠) = (𝑇𝑇𝐻𝐻1𝑠𝑠+1)(𝐾𝐾𝑇𝑇𝐻𝐻2𝑠𝑠+1)𝑒𝑒−τdH𝑠𝑠 (2.1)
Adapun langkah – langkah dalam identifikas Harriott adalah sebagai berikut :
a. Menentukan nilai t33, t70, dant73 saat nilai respon bernilai 33
%, 70 %, dan 72 % dari yss,
b. Selanjutnya mencari nilai (𝑇𝑇𝐻𝐻1+ 𝑇𝑇𝐻𝐻2), melalui Persamaan (2.2) sebagai berikut :
(𝑇𝑇𝐻𝐻1+ 𝑇𝑇𝐻𝐻2) = t1.373 (2.2)
c. Kemudian mencari nilai τdH melalui Persaman (2.3) sebagai berikut :
τdH= 1.937𝑡𝑡33− 0,937𝑡𝑡70 (2.3)
d. Selanjutnya mencari nilai 𝑡𝑡1melalui Persamaan (2.4) sebagai berikut :
𝑡𝑡1=(𝑇𝑇𝐻𝐻1+ 2𝑇𝑇𝐻𝐻2) (2.4)
e. Didapatkan nilai 𝑦𝑦1 melalui grafik respon saat waktu 𝑡𝑡1 f. Didapatkan nilai 𝑇𝑇𝐻𝐻1
(𝑇𝑇𝐻𝐻1+ 𝑇𝑇𝐻𝐻2) melalui persamaan 𝑦𝑦1
yss dengan
menarik garis tersebut pada kurva Harriot.
g. Didapatkan nilai 𝑇𝑇𝐻𝐻2 melalui persamaan pada nomor 2.
Gambar 2.2 Kurva Harriott
III. MODELMATEMATIKAPLANT
Langkah selanjutnya adalah menentukan kondisi berbeban pada spindle. Beban akan dipengaruhi oleh tiga faktor, diantaranya jenis benda, kecepatan feedrate dan kontur pahatan. Beban yang digunakan pada penelitian ini berupa
plastic polyethylene (PE) berukuran 4x4x16,5 cm. Pada Tabel 3.1 dijelaskan mengenai tiga kondisi dalam metode pembebanan yang dilakukan pada identifikasi plant.
Tabel 3.1 Spesifikasi Metode Pembebanan Spesifikasi Kondisi Kecepatan
feedrate
Kecepatan
Spindle
Minimal Tanpa beban 0 mm/min 2000 - 3000 rpm Nominal Dengan beban 250 mm/min 2000 - 3000 rpm Maksimal Dengan beban 500 mm/min 2000 - 3000 rpm Kemudian mendapatkan fungsi penghantar dari masing-masing kondisi beban seperti yang ditunjukkan pada Tabel 3.2. Tabel 3.2. Fungsi Penghantar Kondisi berbeban
Beban Persamaan Model Plant ISE Minimal GH (s) = 1,003 0,0013 s2 + 0,169 s + 1 3.9398∙10 6 Nominal GH (s) = 1 0,0033 s2+0,269 s+1 4.2749 ∙106 Maksimal GH (s) = 0,99 0,03 s2+0,354 s+1e -0,013 s 3.2118∙106
IV. PERANCANGANSISTEM
A. Gambaran Umum Perancangan Sistem
Konfigurasi sistem ditunjukkan pada Gambar 4.1. Pada gambar tersebut terlihat bahwa spindle akan dikendalikan oleh
driver motor. Mikrokontroler ini akan mengatur lebar sinyal
PWM yang nantinya akan dibangkitkan oleh driver motor. Mikrokontroler bekerja dengan cara mengolah masukan sinyal analog dari komputer melalui PCI. PCI akan berfungsi sebagai interkoneksi antara sistem kontrol (komputer) dan perangkat-perangkat seperti spindle dan tachogenerator. Tegangan terbaca pada tachogenerator yang masuk melalui Input Analog PCI akan dibandingkan dengan referensi untuk menghasilkan sinyal error. Sinyal error ini akan diolah untuk menghasilkan kontroler STR. Tachogenerator PCI (Analog Output) Mikrokontroler Driver Komputer (MATLAB) Pembagi Tegangan Spindle Beban Komputer (Walli3) PCI (Analog Output)
Gambar 4.1 Konfigurasi Sistem
B. Perancangan Perangkat Kontroler [4]
Pada penelitian ini kontroler PID-STR digunakan untuk menjaga kestabilan kecepatan spindle saat terkena benda kerja mengikuti kecepatan referensi pada komputer. Sinyal kesalahan yang diperoleh berasal dari masukan setpoint
tegangan (volt) dengan sinyal yang terbaca pada sensor arus dan tachogenerator. Dengan demikian kecepatan spindle
ditentukan. Sinyal keluaran kontroler akan dikonversikan ke dalam sinyal PWM untuk menggerakkan rangkaian driver
sebagai penggerak utama motor spindle .
Pada diagram blok terdapat 3 blok (komponen) utama yang membangun diagram PID Self Tunning regulator, yakni:
1. Perancangan Plant
2. Estimasi Parameter Plant
3. Perancangan Kontroler PID Diskrit
Prosedur desain kontroler Self Tunning Regulator
dilakukan melalui beberapa tahapan, yaitu : 1. Perancangan Plant
Plant yang digunakan pada Tugas Akhir ini adalah
Spindle. Karena yang dikendalikan adalah kecepatan,
respon plant terhadap kecepatan memiliki respon orde kedua. Dengan pendekatan ARX dengan na=1, nb=0 dengan factor delay d=1, sehingga menjadi Persamaan (4.1):
𝑍𝑍(𝑧𝑧) 𝑈𝑈(𝑧𝑧) =
𝑏𝑏0𝑧𝑧−1+𝑏𝑏1𝑧𝑧−2
1+𝑎𝑎1𝑧𝑧−1+ 𝑎𝑎2𝑧𝑧−2 (4.1)
Dari Persamaan (4.1) terlihat ada 4 parameter yang harus dicari nilainya (diestimasi) agar persamaan tersebut memberikan respon yang sama dengan respon plant. Keempat parameter plant tersebut ditampilkan dalam bentuk vektor yang disebut parameter 𝜃𝜃= [𝑎𝑎1 𝑎𝑎2 𝑏𝑏0 𝑏𝑏1]. 2. Estimasi Parameter Plant
Untuk mencari nilai parameter dari plant diperlukan sebuah metode/algoritma tertentu. Pada Tugas Akhir ini dipilih algoritma Recursive Least Square [3]. Metode ini dipilih karena mampu mengestimasi secara online untuk jumlah iterasi yang tak terhingga yaitu dengan memodifikasi nilai matrik gain yang dapat dihitung dengan Persamaan (4.2). Dalam tugas akhir ini digunakan metode Extended Least Square (ELS).
𝐹𝐹(𝑘𝑘+ 1) =𝛼𝛼1
1�𝐹𝐹(𝑘𝑘)−
𝐹𝐹(𝑘𝑘) 𝜑𝜑(𝑘𝑘−1)𝜑𝜑𝑇𝑇(𝑘𝑘−1) 𝐹𝐹(𝑘𝑘) 𝛼𝛼2+𝜑𝜑𝑇𝑇(𝑘𝑘−1) 𝐹𝐹(𝑘𝑘) 𝜑𝜑(𝑘𝑘−1) � (4.2)
Pada Persamaan diatas 𝛼𝛼1 dan 𝛼𝛼2 disebut forgetting
factor, dimana nilai tersebut adalah:
a. Jika 𝛼𝛼1=𝛼𝛼2= 1 maka merupakan bentuk Standart
Least Square (SLS).
b. Jika 0 <𝛼𝛼1< 1 (biasanya bernilai 0.85−0.9) dan 𝛼𝛼2= 1 atau 𝛼𝛼1= 1, 𝛼𝛼2> 1 yang disebut sebagai
constant forgetting factor. Nilai 𝛼𝛼1 dan 𝛼𝛼2 dipilih
secara eksperimental.
c. Jika 𝛼𝛼1=𝑓𝑓1(𝑘𝑘), (0≤ 𝑓𝑓(𝑘𝑘)≤1) dan 𝛼𝛼2= 1 atau 𝛼𝛼1= 1 dan 𝛼𝛼2=𝑓𝑓2(𝑘𝑘)(𝑓𝑓2(𝑘𝑘) > 1) disebut sebagai
variable forgetting factor.
3. Perancangan Kontroler PID Diskrit
Perancangan kontroler PID dilakukan secara analitik. Pencarian parameter kontroler Kp, τi, dan τd
disesuaikan dengan model plant. Pada penelitian ini pencarian parameter kontroler PID dilakukan pada model tiap-tiap kondisi beban. Parameter kontroler PID yang telah didapatkan dipergunakan sebagai batasan dalam perancangan mekanisme penalaan parameter PID. Respon
sistem yang diinginkan pada tiap kondisi beban adalah respon orde satu dengan time constant ( ) = 1 detik. Pada perancangan Tugas Akhir ini digunakan PID yang secara umum dapat dituliskan pada Persamaan (4.3):
𝑈𝑈(𝑠𝑠) 𝐸𝐸(𝑠𝑠)=𝐻𝐻𝑃𝑃𝑃𝑃𝑃𝑃(𝑠𝑠) =𝐾𝐾 �1 + 1 𝜏𝜏𝑖𝑖𝑠𝑠+ 𝜏𝜏𝑑𝑑𝑠𝑠 1+𝜏𝜏𝑑𝑑𝑠𝑠𝑁𝑁� (4.3) Dimana: 𝐾𝐾=𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑡𝑡𝑖𝑖𝑃𝑃𝑃𝑃𝑎𝑎𝑃𝑃 𝐺𝐺𝑎𝑎𝑖𝑖𝑃𝑃 𝜏𝜏𝑖𝑖 =𝑎𝑎𝑘𝑘𝑠𝑠𝑖𝑖 𝑖𝑖𝑃𝑃𝑡𝑡𝑒𝑒𝑖𝑖𝑃𝑃𝑎𝑎𝑃𝑃 𝜏𝜏𝑑𝑑 =𝑎𝑎𝑘𝑘𝑠𝑠𝑖𝑖 𝑑𝑑𝑒𝑒𝑃𝑃𝑖𝑖𝑑𝑑𝑎𝑎𝑡𝑡𝑖𝑖𝑑𝑑𝑒𝑒 𝜏𝜏𝑑𝑑⁄𝑁𝑁=𝐹𝐹𝑖𝑖𝑃𝑃𝑡𝑡𝑒𝑒𝑃𝑃𝑖𝑖𝑃𝑃𝑖𝑖 𝑑𝑑𝑎𝑎𝑃𝑃𝑖𝑖 𝑎𝑎𝑘𝑘𝑠𝑠𝑖𝑖 𝑑𝑑𝑒𝑒𝑃𝑃𝑖𝑖𝑑𝑑𝑎𝑎𝑡𝑡𝑖𝑖𝑑𝑑𝑒𝑒
Beberapa metode untuk mendiskritkan persamaan kontinyu banyak digunakan untuk memperoleh bentuk PID diskrit. Tetapi secara umum bentuk digital kontroler akan sama. Untuk kasus ini diperoleh metode Backward
Difference Approximation di mana factors (derivative)
akan didekati dengan pendekatan 1−𝑞𝑞−1
𝑇𝑇𝑠𝑠 , dan 1/s (integral)
akan didekati dengan 1−𝑞𝑞𝑇𝑇𝑠𝑠−1, dari Persamaan (4.3) akan diperoleh Persamaan (4.4) - (4.6): 1 𝜏𝜏𝑖𝑖𝑠𝑠= 𝑇𝑇𝑠𝑠 𝜏𝜏𝑖𝑖� 1 1−𝑞𝑞−1� (4.4) 𝜏𝜏𝑑𝑑𝑠𝑠=𝜏𝜏𝑇𝑇𝑑𝑑𝑠𝑠[1− 𝑞𝑞−1] (4.5) 1 1+𝜏𝜏𝑑𝑑𝑠𝑠𝑁𝑁 = 1 1+𝑇𝑇𝑠𝑠𝜏𝜏𝑑𝑑𝑁𝑁(1−𝑞𝑞−1) (4.6)
Dengan mengaplikasikan Persamaan (4.4), Persamaan (4.5), dan Persamaan (4.6), maka akan diperoleh transfer function dari digital PID menjadi Persamaan (4.7). 𝐻𝐻𝑃𝑃𝑃𝑃𝑃𝑃(𝑞𝑞−1) =𝑅𝑅(𝑞𝑞 −1) 𝑆𝑆(𝑞𝑞−1)=𝐾𝐾 �1 + 𝑇𝑇𝑠𝑠 𝜏𝜏𝑖𝑖𝑠𝑠 1 1−𝑞𝑞−1+ 𝑁𝑁𝑇𝑇𝑑𝑑 𝜏𝜏𝑑𝑑+𝑁𝑁𝑇𝑇𝑠𝑠(1−𝑞𝑞−1) 1−𝜏𝜏𝑑𝑑+𝜏𝜏𝑑𝑑𝑁𝑁𝑇𝑇𝑠𝑠𝑞𝑞−1�
Dengan menyelesaikan Persamaan (4.7), akan diperoleh bentuk perbandingan polynomial menjadi Persamaan (4.8), dan Persamaan (4.9) :
𝑅𝑅(𝑞𝑞−1) =𝑘𝑘
1+𝑘𝑘2𝑞𝑞−1+𝑘𝑘3𝑞𝑞−2 (4.8)
𝑆𝑆(𝑞𝑞−1) = (1− 𝑞𝑞−1)(1 +𝑘𝑘
0𝑞𝑞−1) (4.9)
Atau dalam bentuk tanformasi z:
𝑈𝑈(𝑧𝑧) 𝐸𝐸(𝑧𝑧)=
𝑘𝑘1+𝑘𝑘2𝑧𝑧−1+𝑘𝑘3𝑧𝑧−2
(1−𝑧𝑧−1)(1+𝑘𝑘0𝑧𝑧−1) (4.10)
Setelah kita mengetahui persamaan diskrit dari PID kontroler, maka didapatkan persamaan close loop transfer
function yang dapat disederhanakan pada Persamaan
(4.11): 𝑌𝑌𝑃𝑃(𝑧𝑧) 𝑈𝑈𝑐𝑐(𝑧𝑧)= �(1𝑘𝑘1+−𝑧𝑧−𝑘𝑘21)(1+𝑧𝑧−1+𝑘𝑘𝑘𝑘3𝑧𝑧−2 0𝑧𝑧−1)�� 𝑏𝑏0 𝑧𝑧−1+𝑏𝑏1 𝑧𝑧− 2 1+𝑎𝑎1 𝑧𝑧−1+ 𝑎𝑎2 𝑧𝑧−2� 1+��(1𝑘𝑘1+−𝑧𝑧−𝑘𝑘21)(1+𝑧𝑧−1+𝑘𝑘𝑘𝑘3𝑧𝑧−2 0𝑧𝑧−1)�� 𝑏𝑏0 𝑧𝑧−1+𝑏𝑏1 𝑧𝑧−2 1+𝑎𝑎1 𝑧𝑧−1+ 𝑎𝑎2 𝑧𝑧−2�� (4.11) τ (4.7)
Jika dipilih 𝑎𝑎1=𝑘𝑘2 𝑘𝑘1 dan 𝑎𝑎2= 𝑘𝑘3 𝑘𝑘1 akan diperoleh Persamaan (4.12) : 𝑌𝑌𝑃𝑃(𝑧𝑧) 𝑈𝑈𝑐𝑐(𝑧𝑧)= �(1𝑘𝑘1+−𝑧𝑧−𝑘𝑘21)(1+𝑧𝑧−1+𝑘𝑘𝑘𝑘3𝑧𝑧−2 0𝑧𝑧−1)�� 𝑏𝑏0 𝑧𝑧−1+𝑏𝑏1 𝑧𝑧−2 1 𝑘𝑘1�𝑘𝑘1+𝑘𝑘2 𝑧𝑧−1+ 𝑘𝑘3 𝑧𝑧−2� � 1+��𝑘𝑘1+𝑘𝑘2𝑧𝑧−1+𝑘𝑘3𝑧𝑧−2 (1−𝑧𝑧−1)(1+𝑘𝑘0𝑧𝑧−1)�� 𝑏𝑏0 𝑧𝑧−1+𝑏𝑏1 𝑧𝑧−2 1 𝑘𝑘1�𝑘𝑘1+𝑘𝑘2 𝑧𝑧−1+ 𝑘𝑘3 𝑧𝑧−2� �� (4.12)
Jika kemudian dipilih lagi, 𝑘𝑘0=𝑏𝑏1
𝑏𝑏0 akan diperoleh Persamaan (4.13): 𝑌𝑌𝑃𝑃(𝑧𝑧) 𝑈𝑈𝑐𝑐(𝑧𝑧)= 𝑘𝑘1𝑏𝑏0� 𝑏𝑏0 𝑏𝑏0𝑧𝑧−1+ 𝑏𝑏1 𝑏𝑏0𝑧𝑧−2 (1−𝑧𝑧−1)(1+𝑘𝑘0𝑧𝑧−1)� 1+𝑘𝑘1𝑏𝑏0� 𝑏𝑏0 𝑏𝑏0𝑧𝑧−1+𝑏𝑏𝑏𝑏10𝑧𝑧−2 (1−𝑧𝑧−1)(1+𝑘𝑘0𝑧𝑧−1)� (4.13) Jadi Persamaan CLTF akan menjadi bentuk sederhana menjadi Persamaan (4.14) sebagai berikut:
𝑌𝑌𝑃𝑃(𝑧𝑧) 𝑈𝑈𝑐𝑐(𝑧𝑧)=
𝑘𝑘1𝑏𝑏0𝑧𝑧−1
(1−𝑧𝑧−1)
1+𝑘𝑘(11−𝑧𝑧−𝑏𝑏0𝑧𝑧−1)1 (4.14)
Dan bentuk fungsi alih CLTF akhir adalah Persamaan (4.15) seperti di bawah:
𝑌𝑌𝑃𝑃(𝑧𝑧) 𝑈𝑈𝑐𝑐(𝑧𝑧)=
𝑘𝑘1𝑏𝑏0𝑧𝑧−1
1+(𝑘𝑘1𝑏𝑏0−1)𝑧𝑧−1 (4.15)
Terlihat Persamaan Close Loop Transfer Function
(CLTF) plan adalah orde satu, dengan time constant fungsi nilai parameter 𝑘𝑘1𝑏𝑏0. Dari model referensi diskrit orde 1 didapatkan :
𝑌𝑌𝑚𝑚(𝑧𝑧) 𝑈𝑈𝑐𝑐(𝑠𝑠)=
𝐶𝐶𝑧𝑧−1
1−𝑃𝑃𝑧𝑧−1 (4.16)
Karena 𝑌𝑌𝑚𝑚 =𝑌𝑌𝑃𝑃 maka dapat diformulasikan
menjadi Persamaan (4.17) :
𝑘𝑘1𝑏𝑏0=𝐶𝐶 (4.17)
Sehingga:
𝑘𝑘1=�𝑏𝑏10� 𝐶𝐶 (4.18)
Maka akan diperoleh parameter-parameter k0, k1, k2 dan k3 yang dapat dilihat pada Persamaan (4.19) :
𝑘𝑘1=�𝑏𝑏10�𝐶𝐶, 𝑘𝑘2=𝑎𝑎1𝑘𝑘1, 𝑘𝑘3=𝑎𝑎2𝑘𝑘1, 𝑘𝑘0=𝑏𝑏𝑏𝑏01 (4.19)
Maka semua parameter kontroler PID telah ditemukan dalam bentuk parameter plant dan dalam bentuk orde 1. Sinyal kontrol yang akan diumpankan ke
plant dalam bentuk persamaan beda diberikan oleh
Persamaan (4.20) sebagai berikut:
𝑢𝑢(𝑘𝑘) = (𝑘𝑘0−1) 𝑢𝑢(𝑘𝑘 −1) +𝑘𝑘0𝑢𝑢(𝑘𝑘 −2) +𝑘𝑘2𝑒𝑒(𝑘𝑘 −1) +
𝑘𝑘3𝑒𝑒(𝑘𝑘 −2) (4.20)
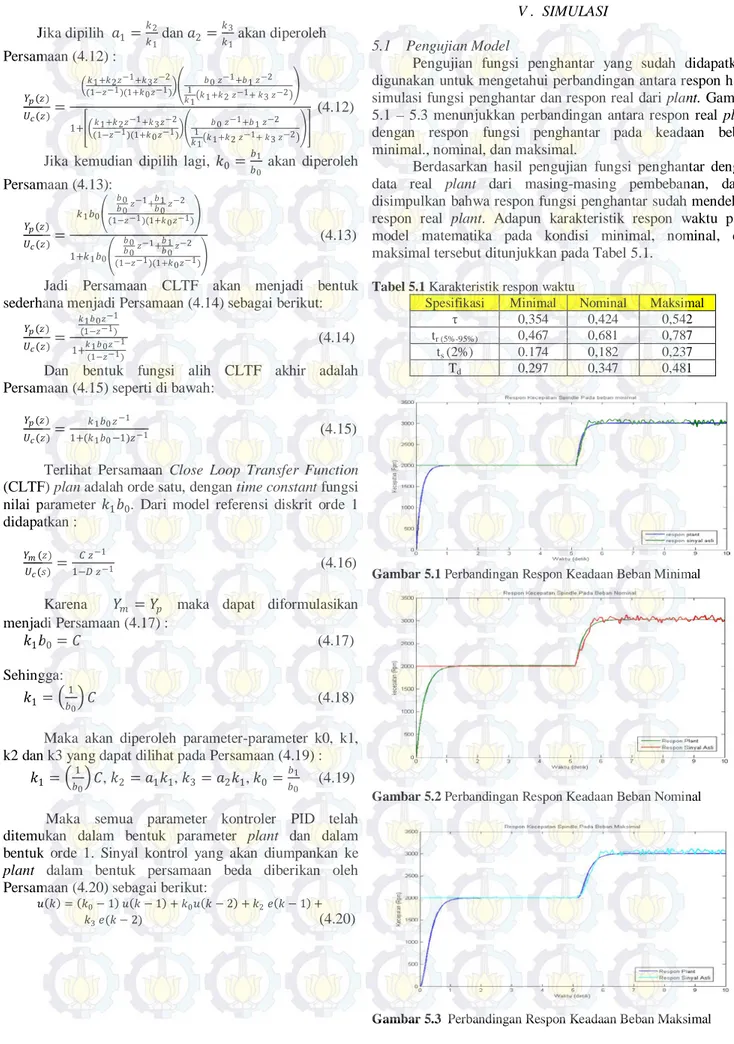
V . SIMULASI 5.1 Pengujian Model
Pengujian fungsi penghantar yang sudah didapatkan, digunakan untuk mengetahui perbandingan antara respon hasil simulasi fungsi penghantar dan respon real dari plant. Gambar 5.1 – 5.3 menunjukkan perbandingan antara respon real plant
dengan respon fungsi penghantar pada keadaan beban minimal., nominal, dan maksimal.
Berdasarkan hasil pengujian fungsi penghantar dengan data real plant dari masing-masing pembebanan, dapat disimpulkan bahwa respon fungsi penghantar sudah mendekati respon real plant. Adapun karakteristik respon waktu pada model matematika pada kondisi minimal, nominal, dan maksimal tersebut ditunjukkan pada Tabel 5.1.
Tabel 5.1 Karakteristik respon waktu
Spesifikasi Minimal Nominal Maksimal τ 0,354 0,424 0,542
tr (5%-95%) 0,467 0,681 0,787
ts (2%) 0.174 0,182 0,237
Td 0,297 0,347 0,481
Gambar 5.1 Perbandingan Respon Keadaan Beban Minimal
Gambar 5.2 Perbandingan Respon Keadaan Beban Nominal
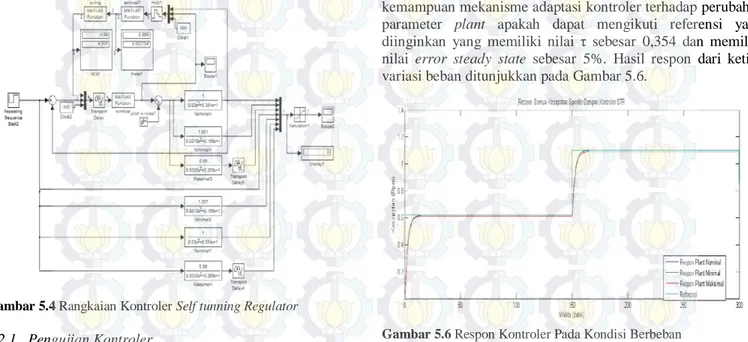
5.2 Pengujian Simulasi Sistem
Simulasi dilakukan untuk mengetahui performansi sistem dari kontroler Self Tunning Regulator sebelum diimplementasikan ke real plant. Proses simulasi dilakukan juga untuk mengetahui hasil perancangan sistem dapat diaplikasikan atau memerlukan adanya modifikasi tertentu untuk mencapai karakteristik yang diinginkan. Pada simulasi kontroler adaptif Self Tunning Regulator berupa kontroler dengan keluaran sinyal kontrol diskrit. Simulasi menggunakan perangkat lunak MATLAB dengan time sampling 15 milidetik.
Pengujian yang akan dilakukan pada sistem simulasi ini yaitu berupa pengujian terhadap sinyal kontroler, pengujian terhadap variasi beban, dan pengujian terhadap gangguan. Pengujian ini dilakukan untuk mengetahui sejauh mana performansi regulator dari sistem. Gambar 5.4 menujukkan rangkaian simulasi sistem dengan menggunakan MATLAB.
Gambar 5.4 Rangkaian Kontroler Self tunning Regulator 5.2.1 Pengujian Kontroler
Pada rangkaian sistem ini menggunakan masukan berupa sinyal tangga yang memiliki besaran 0,62 – 1,1 (dalam volt) yang merupakan besarnya tegangan pada kecepatan referensi mulai dari 2000 – 3000 rpm.
Gambar 5.5 Respon Sistem Kontroler Self Tunning Regulator
Berdasarkan Gambar 5.5, respon kontroler mampu mengikuti respon referensi. Pada hasil simulasi, baik respon
plant maupun respon kontroler tersebut sudah tidak terdapat
error steady state. Pada simulasi tersebut didapatkan nilai tr
pada respon plant sebesar 0 detik dan respon kontroler sebesar 5,7 detik. Hal ini membuktikan bahwa respon kontroler dapat mengikuti referensi yang diinginkan namun memiliki nilai
transien yang lebih lambat. Adapun perbandingan respon plant
dan respon kontroler dapat dilihat pada Tabel 5.2. Tabel 5.2 Perbandingan Respon Plant dan Respon Kontroler
5.2.2 Pengujian Terhadap Variasi Beban
Langkah selanjutnya adalah melakukan pengujian terhadap variasi beban pada kondisi minimal, nominal, dan maksimal. Pengujian ini digunakan untuk mengetahui kemampuan mekanisme adaptasi kontroler terhadap perubahan parameter plant apakah dapat mengikuti referensi yang diinginkan yang memiliki nilai τ sebesar 0,354 dan memiliki nilai error steady state sebesar 5%. Hasil respon dari ketiga variasi beban ditunjukkan pada Gambar 5.6.
Gambar 5.6 Respon Kontroler Pada Kondisi Berbeban
Tabel 5.3 Perbandingan Respon Kontroler Pada Kondisi Berbeban
Berdasarkan hasil pengujian yang ditunjukkan pada Tabel 5.3, didapatkan nilai τ pada respon kontroler minimal, nominal dan maksimal adalah sebesar 153,1 detik, 153,3 detik, dan 153,4 detik. Sedangkan besarnya nilai Ess pada respon kontroler minimal, nominal, dan maksimal masing – masing sebesar 0,09%, 0%, dan 1%. Hal ini membuktikan bahwa sistem adaptif pada Self Tunning Regulator mampu bekerja dengan baik pada saat perubahan parameter plant.
5.2.3 Pengujian Terhadap Gangguan
Pengujian ini digunakan untuk mengetahui kemampuan mekanisme adaptasi kontroler terhadap gangguan yang diberikan. Pengujian terhadap gangguan ini diharapkan
Spesifikasi τ (s) tr (5%-95%) (s) ts (5%) (s) Td (s) Ess Respon Plant 153 0 150 150 0 % Respon Kontroler 153,3 5,7 155,8 152,3 0 % Spesifikasi τ (s) tr (5%-95%) (s) ts (5%) (s) Td (s) Ess Minimal 153,1 4,9 155,3 152,1 0,09% Nominal 153,3 5,7 155,8 152,3 0 % Maksimal 153,4 13,5 164 152,4 1 %
kontroler Self Tunning Regulator pada kondisi berbeban dapat mengikuti referensi yang diinginkan yang memiliki nilai τ sebesar 0,354 dan memiliki nilai error steady state sebesar 5%. Pada pengujian ini menggunakan sinyal gangguan noise
sebesar 0,0001 dengan waktu sampel 0,5 detik.
Gambar 5.7 Respon Kontroler Pada Kondisi Minimal
Gambar 5.8 Respon Kontroler Pada Kondisi Nominal
Gambar 5.9 Respon Kontroler Pada Kondisi Maksimal
Gambar 5.7, Gambar 5.8, dan Gambar 5.9 merupakan hasil pengujian kontroler pada beban minimal, nominal, dan maksimal terhadap gangguan. Adapun perbandingan hasil gangguan pada kondisi berbeban dapat dilihat pada Tabel 4.4. Berdasarkan Tabel 5.3 dan Tabel 5.4 dapat dilihat bahwa respon kontroler memiliki nilai τ yang lebih cepat daripada
respon kontroler saat tidak diberi gangguan. Adapun perbandingan hasil gangguan pada kondisi berbeban didapatkan pada Tabel 5.4.
Tabel 5.4 Perbandingan Hasil Gangguan Pada Kondisi Berbeban
5.3 Pengujian Implementasi Kontroler
Pada tahap ini terdapat permasalahan dalam implementasi dengan menggunakan program Real-Time
Windows Target pada software MATLAB. Program tersebut
tidak bisa menjalankan dalam bentuk m-file. Sehingga pada tahap implementasi kontroler ini menggunakan kontroler PID biasa. Dari hasil pengujian implementasi tersebut didapatkan respon yang berbeda dibandingkan dengan respon driver asli pada mesin CNC. Hal ini disebabkan karena pada driver asli terdapat rangkaian kontroler yang dapat mempertahankan nilai PWM. Adapun spesifikasi respon implementasi pada kondisi beban minimal dan nominal tanpa kontroler dapat dilihat pada Gambar 5.10 dan Gambar 5.11.
Gambar 5.10 Hasil Implementasi Beban Minimal Tanpa Kontroler
Gambar 5.11 Hasil Implementasi Beban Nominal Tanpa Kontroler
Berdasarkan hasil yang didapatkan pada pengujian implementasi tanpa kontroler tersebut, diperlukan tuning secara manual untuk mendapatkan parameter kontroler PID agar respon yang didapatkan lebih baik dan dapat mengikuti referensi yang diberikan. Adapun parameter kontroler PID
hasil tuning manual didapatkan nilai
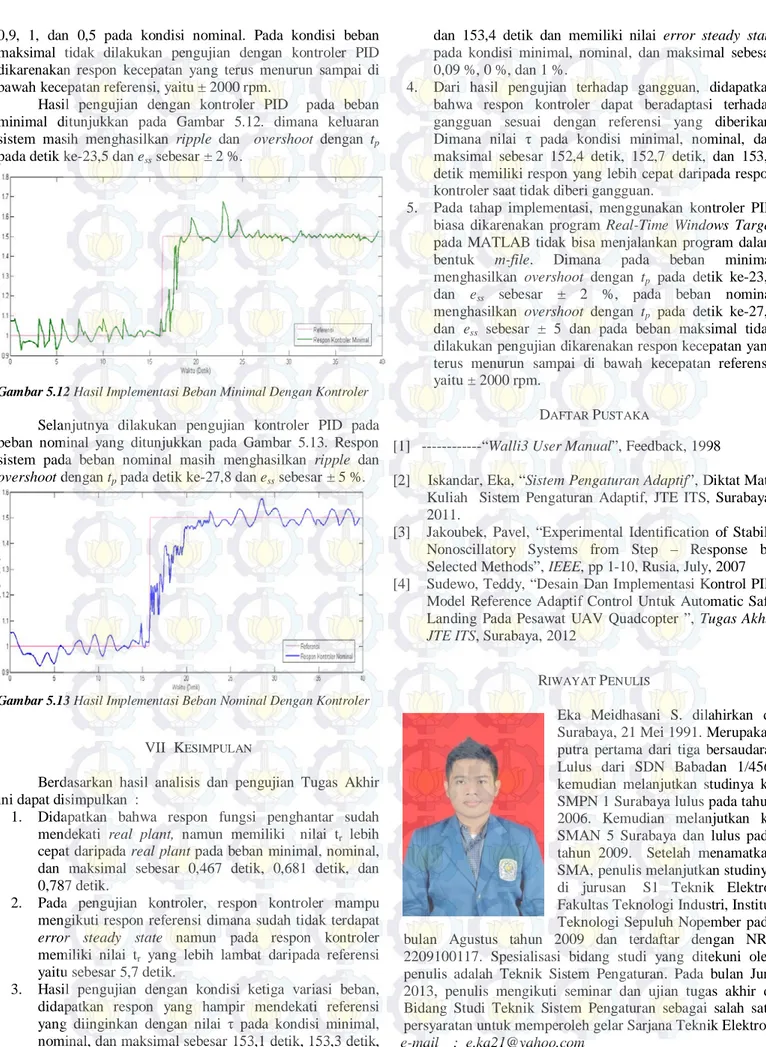
Kp, τi, dan τd adalah 1, 0,8, dan 0,3 pada kondisi minimal dan
Spesifikasi τ (s) tr (5%-95%) (s) ts (5%) (s) Td (s) Ess Minimal 152,4 5,7 156,1 151,9 0,09% Nominal 152,7 5,9 156,4 152,1 0 % Maksimal 153,3 6,4 157 152,3 1 %
0,9, 1, dan 0,5 pada kondisi nominal. Pada kondisi beban maksimal tidak dilakukan pengujian dengan kontroler PID dikarenakan respon kecepatan yang terus menurun sampai di bawah kecepatan referensi, yaitu ± 2000 rpm.
Hasil pengujian dengan kontroler PID pada beban minimal ditunjukkan pada Gambar 5.12. dimana keluaran sistem masih menghasilkan ripple dan overshoot dengan tp
pada detik ke-23,5 dan ess sebesar ± 2 %.
Gambar 5.12 Hasil Implementasi Beban Minimal Dengan Kontroler Selanjutnya dilakukan pengujian kontroler PID pada beban nominal yang ditunjukkan pada Gambar 5.13. Respon sistem pada beban nominal masih menghasilkan ripple dan
overshoot dengan tp pada detik ke-27,8 dan ess sebesar ± 5 %.
Gambar 5.13 Hasil Implementasi Beban Nominal Dengan Kontroler
VII KESIMPULAN
Berdasarkan hasil analisis dan pengujian Tugas Akhir ini dapat disimpulkan :
1. Didapatkan bahwa respon fungsi penghantar sudah mendekati real plant, namun memiliki nilai tr lebih
cepat daripada real plant pada beban minimal, nominal, dan maksimal sebesar 0,467 detik, 0,681 detik, dan 0,787 detik.
2. Pada pengujian kontroler, respon kontroler mampu mengikuti respon referensi dimana sudah tidak terdapat
error steady state namun pada respon kontroler
memiliki nilai tr yang lebih lambat daripada referensi
yaitu sebesar 5,7 detik.
3. Hasil pengujian dengan kondisi ketiga variasi beban, didapatkan respon yang hampir mendekati referensi yang diinginkan dengan nilai τ pada kondisi minimal, nominal, dan maksimal sebesar 153,1 detik, 153,3 detik,
dan 153,4 detik dan memiliki nilai error steady state
pada kondisi minimal, nominal, dan maksimal sebesar 0,09 %, 0 %, dan 1 %.
4. Dari hasil pengujian terhadap gangguan, didapatkan bahwa respon kontroler dapat beradaptasi terhadap gangguan sesuai dengan referensi yang diberikan. Dimana nilai τ pada kondisi minimal, nominal, dan maksimal sebesar 152,4 detik, 152,7 detik, dan 153,3 detik memiliki respon yang lebih cepat daripada respon kontroler saat tidak diberi gangguan.
5. Pada tahap implementasi, menggunakan kontroler PID biasa dikarenakan program Real-Time Windows Target
pada MATLAB tidak bisa menjalankan program dalam bentuk m-file. Dimana pada beban minimal menghasilkan overshoot dengan tp pada detik ke-23,5
dan ess sebesar ± 2 %, pada beban nominal
menghasilkan overshoot dengan tp pada detik ke-27,8
dan ess sebesar ± 5 dan pada beban maksimal tidak
dilakukan pengujian dikarenakan respon kecepatan yang terus menurun sampai di bawah kecepatan referensi, yaitu ± 2000 rpm.
DAFTAR PUSTAKA
[1] ---“Walli3 User Manual”, Feedback, 1998
[2] Iskandar, Eka, “Sistem Pengaturan Adaptif”, Diktat Mata Kuliah Sistem Pengaturan Adaptif, JTE ITS, Surabaya, 2011.
[3] Jakoubek, Pavel, “Experimental Identification of Stabile Nonoscillatory Systems from Step – Response by Selected Methods”, IEEE, pp 1-10, Rusia, July, 2007 [4] Sudewo, Teddy, “Desain Dan Implementasi Kontrol PID
Model Reference Adaptif Control Untuk Automatic Safe Landing Pada Pesawat UAV Quadcopter ”, Tugas Akhir
JTE ITS, Surabaya, 2012
RIWAYAT PENULIS
Eka Meidhasani S. dilahirkan di Surabaya, 21 Mei 1991. Merupakan putra pertama dari tiga bersaudara. Lulus dari SDN Babadan 1/456, kemudian melanjutkan studinya ke SMPN 1 Surabaya lulus pada tahun 2006. Kemudian melanjutkan ke SMAN 5 Surabaya dan lulus pada tahun 2009. Setelah menamatkan SMA, penulis melanjutkan studinya di jurusan S1 Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember pada bulan Agustus tahun 2009 dan terdaftar dengan NRP 2209100117. Spesialisasi bidang studi yang ditekuni oleh penulis adalah Teknik Sistem Pengaturan. Pada bulan Juni 2013, penulis mengikuti seminar dan ujian tugas akhir di Bidang Studi Teknik Sistem Pengaturan sebagai salah satu persyaratan untuk memperoleh gelar Sarjana Teknik Elektro.