ROBUN ROBOT PENGAMAN KEBUN PENGUSIR HAMA
BAJING
Ayu Maulidiyah1, Gillang Al Azhar2, Muhammad Hasan3, Yanna Maharastri4, Andriani Parastiwi5
Jurusan Teknik Elektro, Politeknik Negeri Malang
[email protected] [email protected]
[email protected] [email protected] [email protected]
Abstrak
Desa Selorejo Petungsewu merupakan sentra buah jeruk di daerah Kabupaten Malang. Petani jeruk Desa Selorejo selalu mengoptimalkan hasil panen buah jeruk dengan menjaga kualitas dan kuantitas buah jeruk. Diantaranya dengan memberi pupuk yang tepat dan memberi sedikit insektisida pada buah jeruk. Namun pemberian sedikit insektisida pada buah jeruk ini menimbulkan masalah bagi petani jeruk. Bajing sangat suka dengan buah jeruk yang terkontaminasi sedikit insektisida. Sehingga timbul permasalahan bagaimana cara mengusir hama bajing dengan tidak membunuh bajing tersebut. Dengan adanya permasalahan tersebut diusulkan sebuah robot yang disebut Robun. Robun merupakan robot yang didesain untuk mampu mendeteksi kedatangan hama bajing dari arah 2 dimensi maupun 3 dimensi. Ketika sensor pada Robun mendeteksi datangnya bajing, secara otomatis ekor Robun dapat bergerak yang nantinya di gerakkan oleh motor dan Robun akan mengeluarkan suara anjing. Bajing akan langsung pergi karena bajing takut dengan suara anjing.
Kata Kunci: Bajing, robot, sensor, motor
1. Pendahuluan
Desa Selorejo Petungsewu merupakan sentra buah jeruk Kabupaten Malang dengan jumlah kebun seluas 750 Ha dan 500 orang petani jeruk [Yanuari, 2014]. Petani buah jeruk di Desa Selorejo selalu menjaga kualitas hasil panen buah jeruk dengan cara memberikan pupuk yang tepat dan sesedikit mungkin insektisida. Pemberian insektisida yang sedikit ini sangat baik untuk konsumen jeruk. Namun hal tersebut mengakibatkan meningkatnya hama yang memakan buah jeruk. Salah satu hama yang sulit diberantas adalah hama bajing.
Bajing sangat senang memakan buah jeruk yang sudah matang dan tidak terkontaminasi insektisida. Bagi konsumen
wisata petik jeruk adanya hama bajing menunjukkan bahwa jeruk yang ada di lokasi tersebut terbebas dari insektisida. Namun bagi petani adanya hama bajing menyebabkan turunnya jumlah hasil panen buah jeruk.
digunakan untuk mengusir bajing dari kebun jeruk. Robot ini disebut Robun.
Robun dirancang untuk dapat mendeteksi bajing yang mencoba masuk ke area kebun jeruk, baik dari arah 2 dimensi (depan/belakang, samping kanan/kiri) maupun dari arah 3 dimensi (depan/belakang, samping kanan/kiri, atas) menggunakan sensor ping yang merupakan sensor jarak ultrasonik[Warman, 2011]. Sensor ping ini akan bekerja jika mendapat sinyal dari obyek yang bergerak dan terdeteksi sensor. Sensor yang telah terdeteksi ini akan mengaktifkan sinyal ke penggerak motor sehingga Robun akan bergerak dan mengeluarkan suara. Dengan begitu bajing akan pergi karena bajing takut dengan suara dan gerakan yang tiba-tiba, sehingga bajing yang datang tidak sempat memakan buah.
Dengan adanya Robun ini diharapkan dapat membantu petani jeruk untuk menjaga kebun jeruknya dari hama hewan bajing yang akan memakan buah yang hendak dipanen.
A. Rumusan Masalah
Permasalahan dalam Robun Robot Pengaman Kebun Pengusir Hama Bajing adalah sebagai berikut:
1) Bagaimana merancang dan membuat sensor Robun?
2) Bagaimana merancang dan membuat penggerak motor Robun?
3) Bagaimana mengujicoba Robun di laboratorium dan di kebun jeruk?
B. Tujuan
Berdasarkan permasalahan diatas dapat diperoleh tujuan sebagai berikut:
1) Merancang dan membuat sensor ping Robun.
2) Merancang dan membuat penggerak motor Robun.
3) Mengujicoba Robun di laboratorium dan di kebun jeruk
. 2. Metode
Penyusunan perancangan ini didasarkan dalam masalah yang bersifat aplikatif, yaitu perencanaan dan perealisasian alat agar dapat bekerja sesuai dengan yang direncanakan dengan mengacu dalam rumusan masalah. Langkah-langkah yang perlu dilakukan untuk merealisasikan alat yang dirancang adalah studi lapangan, studi literatur, perancangan sistem, pengujian alat, dan penarikan kesimpulan.
Gambar 1. Metode Pelaksanaan
A. Studi Lapangan
B. Studi Literatur
Pada studi literatur dilakukan beberapa kegiatan yaitu mencari informasi mengenai perilaku atau kebiasaan bajing, mencari informasi tentang perancangan robot, dan menambah pengetahuan mengenai mikrokontroller, sensor ping, dan driver motor DC. Kegiatan mencari informasi mengenai perilaku atau kebiasaan bajing dilakukan untuk menambah pengetahuan mengenai kebiasaan bajing selain yang telah di informasikan dari mitra. Kegiatan mencari informasi tentang perancangan robot, dilakukan untuk mengetahui hal hal apa saja yang harus dilakukan untuk membuat robot. Dan yang terakhir adalah kegiatan menambah pengetahuan mengenai mikrokontroller, sensor ping, dan driver motor DC. Setelah studi literatur dilaksanakan, maka masuk pada tahap perencanaan sistem.
C. Perencanaan Sistem
Perencanaan sistem meliputi: 1. Perencanaan Elektronik
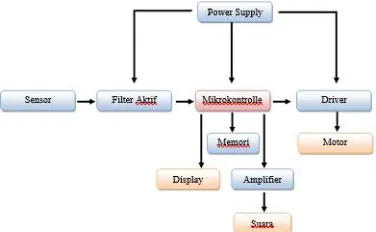
Untuk perencanaan elektronik sistem dapat dilihat pada gambar 3 dibawah ini. Blok diagram tersebut menjelaskan bahwa sensor dikirim ke mikrokontroller melalui filter aktif yang terdapat di dalam mikrokontroller. Power supply memberikan tegangan kepada filter aktif dan regulator yang akan dikirim ke mikrokontroller. Mikrokontroller menggerakkan motor melalui driver yang juga diberi tegangan oleh power supply sehingga dapat mengerakkan motor. Motor yang bergerak juga diiringi bersamaan dengan keluarnya suara yang dikirim dari amplifier yang berasal dari mikrokontroller. Hasil semua program pada mikrokontroller dapat di tampilkan pada LCD yang bertindak sebagai display untuk menampilkan data-data dari mikrokontroller.
Gambar 3. Perencanaan Elektronik
2. Perencanaan Mekanik
Untuk Perencanaan Mekanik berupa pembuatan konstruksi Robun yang meliputi tubuh dan ekor Robun. Tubuh Robun di rencanakan terbuat dari acrilic dimana tahap pembuatannya dapat dilihat pada gambar 4.
Gambar 4. Perencanaan Mekanik
3. Perencanaan Software.
Sedangkan untuk perencanaan software dapat dilihat pada gambar 5, terdapat 4 tahap yang harus di selesaikan dalam pembuatan Robun.
Gambar 5. Perencanaan Software
• Program deteksi sensor menggunakan prinsip kerja sensor akan memdeteksi dengan jarak tertentu.
• Program Motor DC adalah program untuk menggerakkan ekor Robun yang nantinya akan bergerak ketika Robun bekerja. Ekor ini nantinya akan bekerja bersamaan dengan Robun mengeluarkan suara.
• Program MP3 adalah program untuk menyimpan suara yang nantinya akan di keluarkan oleh Robun.
D. Pengujian Alat
Setelah semua perencanaan selesai dilaksanakan, maka pembuatan Robun dapat dilaksanakan dengan menggabungkan semua perencanaan sistem. Setelah itu dilakukan Pengujian Robun.
Pengujian yang dilakukan meliputi: 1) Pengujian RangkaianPower Supply 2) Pengujian Deteksi Sensor
3) Pengujian Amplifier
4) Pengujian Driver Motor DC 5) Pengujian Modul MP3
Robun membutuhkan tegangan untuk dapat bekerja. Supply yang digunakan agar Robun dapat bekerja adalah baterai DC.
Untuk sensor yang digunakan adalah Sensor SRF05 yang merupakan sensor jarak yang hanya mampu mendeteksi satu arah dengan jangkauan maksimal 5m. Robun diletakkan di tengah area kebun jeruk dengan luas kurang lebih 10 m2. Sensor SRF05 ini diletakkan di sekeliling badan Robun sehingga Robun tetap dapat mendeteksi kedatangan Bajing dari segala arah.
Driver Motor DC digunakan sebagai penggerak ekor Robun. Seperti yang sudah digambarkan pada blok diagram Perencanaan Elektronik pada gambar 3, ketika sensor bekerja, maka mikrokontroller menggerakkan driver motor. Driver motor ini lah yang menyebabkan ekor Robun dapat bergerak sehingga membuat Robun seolah-olah hidup.
Selain ekor Robun yang bergerak, ketika sensor bekerja, Robun juga dapat mengeluarkan suara. Suara ini berupa suara
anjing yang disimpan dalam modul MP3. Modul MP3 ini bekerja bersama dengan driver motor yang menggerakkan ekor Robun.
Pada metode melakukan uji coba di laboratorium, dilakukan pada tahap pembuatan Robun. Jika terdapat masalah saat melakukan uji coba maka kembali pada tahap perencanaan untuk mengetahui kesalahan kesalahan yang terdapat pada saat pembuatan Robun. Siklus ini akan terus berulang sampai tidak terjadi kesalahan pada Robun. Ketika sudah tidak terjadi kesalahan maka memasuki tahap metode uji coba lapangan.
Uji Coba lapangan dilakukan ketika tahap uji coba laboratorium telah selesai dilaksanakan. Lokasi Uji Coba Lapangan dilakukan di Kebun Jeruk Desa PetungSewu Kabupaten Dau.. Jika masih terdapat masalah saat melakukan uji coba maka kembali lagi pada tahap perencanaan sistem. Siklus ini akan terus berulang sampai tidak terjadi kesalahan pada Robun.
3. Hasil dan Pembahasan
Berikut merupakan hasil dari pelaksanaan pembuatan Robun Robot Pengaman Kebun Pengusir Hama Bajing yang telah dilakukan:
1. Sensor yang digunakan adalah sensor yang mampu mendeteksi kedatangan hewan bajing pada jarak tertentu.
2. Robun ini mampu memberi output alarm berupa suara anjing dan ekor yang bergerak jika Robun telah mendeteksi kedatangan bajing. 3. Sistem elektronik Robun terdiri dari
Berikut merupakan hasil dokumentasi saat melakukan pengujian Robun.
Gambar 6. Rangkaian Elektronik Robun
Gambar 7. Uji Elektronik Robun
Gambar 8. Lokasi Kebun Jeruk dan Tempat Peletakan Robun
Gambar 9. Uji Lapangan Robun
4. Kesimpulan
Robun Robot Pengaman Kebun Pengusir Hama Bajing ini merupakan
Robot yang mampu memberikan output alarm berupa suara anjing dengan ekor Robun yang bergerak ketika Robun mendeteksi kedatangan hewan bajing. Sensor Robun yang telah terdeteksi dikirim ke mikrokontroller sehingga mengaktifkan amplifier dan Robun dapat mengeluarkan suara anjing. Selain itu, mikrokontroller juga mengaktifkan driver motor DC yang menyebabkan ekor Robun bergerak. Robun ini diharapkan dapat membantu petani buah khususnya petani buah jeruk di Desa Petungsewu, Kabupaten Dau untuk menjaga jumlah hasil panen buah jeruk dari serangan hama bajing.
Ucapan Terima Kasih
Terima kasih kepada Kementrian Riset dan Pendidikan Tinggi yang telah membiayai kegiatan ini melalui Program Kreativitas Mahasiwa tahun anggaran 2015. Terima kasih juga kepada Dosen Pembimbing Dr. Andriani Parastiwi, BSEET., MT yang telah membimbing beserta seluruh staf dan mahasiswa Politeknik Negeri Malang yang telah membantu dalam penyelesaian kegiatan ini.
Daftar Pustaka
Yanuari, A. 2014. Identifikasi Potensi Wilayah Desa Selorejo, Dau,
Kabupaten Malang.
http://blog.ub.ac.id/ahmad2/2014/0 7/13/ipw-identifikasi-potensi-wilayah-selorejo-dau-kab-malang/. Diakses tanggal 21 September 2014
Warman, A. 2011.Sensor Jarak Ultrasonik PING.
http://repository.usu.ac.id/bitstream/1 23456789/29570/4/Chapter%20II.pdf
. Diakses tanggal 21 September 2014
Naziq, A. 2013. Pengertian Mikrokontroller.
iterbarusekali/pengertian-mikrokontroller. Diakses tanggal 23 September 2014
Anugerah, A. 2011. Ping Sensor.
http://www.scribd.com/doc/7209724
6/Tugas-Ping-Sensor. Diakses
tanggal 23 September 2014
Agustina, Y. 2013. Motor Penggerak Tangan.
http://www.academia.edu/7547671/ Motor_penggerak_Listrik. Diakses tanggal 23 September 2014
Lmi. 2013. Outbond Bersama 25 Anak Yatim di Wisata Petik Jeruk BEDENGAN.
http://www.lmimalang.org/laporan/fo