I PENDAHULUAN
1.1 Latar Belakang
Di alam terdapat banyak sekali jenis makhluk hidup. Makhluk hidup tersebut akan menjalani seleksi alam di mana yang kuat yang akan bertahan. Salah satu kejadian yang dapat diamati adalah persaingan untuk memperoleh makanan dalam peristiwa makan dan dimakan. Makhluk hidup pemakan atau dikenal sebagai pemangsa (predator) akan mencari buruan atau dikenal dengan mangsa (prey) guna mempertahankan hidup.
Dalam tulisan ini, peristiwa tersebut diamati pada dua pemangsa dan satu mangsa, beserta analisis solusinya. Persaingan bagi dua pemangsa dalam mencari satu mangsanya dapat dimodelkan sebagai pemodelan tiga dimensi yang melibatkan tiga variabel state.
Terdapat banyak model yang menggambarkan peristiwa mangsa-pemangsa, seperti; model Lotka-Volterra, Holling tipe II, dan Holling tipe III. Dalam penulisan karya ilmiah ini, penulis membatasi diri pada model Holling tipe III, mengingat bahwa model ini menggambarkan secara jelas penurunan
tingkat pemangsaan pada saat kepadatan mangsa rendah
Model Holling (Eisenberg dan Maszle, 1995) untuk kali pertama diperkenalkan oleh seorang ilmuwan matematika bernama Holling pada tahun 1959 dalam tulisannya yang berjudul “Some characteristics of simple types of predation and parasitism.”
1.2 Tujuan
Tujuan utama penulisan ini adalah menganalisis solusi model mangsa-pemangsa mengikuti model Holling Tipe III secara grafis.
1.3 Sistematika Penulisan
Pada bab satu dijelaskan latar belakang serta tujuan dari penulisan karya ilmiah ini. Bab dua berisi landasan teori yang menjadi konsep dasar dalam penyusunan pembahasan. Bab tiga akan membahas model persamaan mangsa-pemangsa mengikuti model Holling tipe III, serta bab empat berisi simpulan dan saran.
II LANDASAN TEORI
2.1 Sistem Persamaan Diferensial Linear Misalkan sebuah sistem persamaan diferensial (SPD) linear dinyatakan sebagai:
( )
0 0,n
= ∈
x = Ax + b, x x x (2.1)
dengan A adalah matriks koefisien berukuran
n x n dan vektor konstan ∈ n
b , maka
sistem tersebut dinamakan SPD linear orde 1 dengan kondisi awal x
( )
0 =x0. Sistem (2.1)dikatakan homogen jika b=0 dan
takhomogen jika b≠0.
(Tu, 1994) 2.2 Sistem Persamaan Diferensial
Mandiri
Misalkan diberikan suatu sistem persamaan diferensial orde 1 sebagai berikut:
( , ), ( , ), x f x y y g x y = = (2.2)
dengan f dan g fungsi kontinu bernilai real
dari x dan y , dengan laju perubahan x dan ydinyatakan dengan fungsi x dan y sendiri
serta tidak berubah terhadap waktu, maka sistem (2.2) merupakan sistem persamaan differensial mandiri.
(Verhulst, 1990) 2.3 Metode Runge-Kutta Orde 4
Pandang masalah nilai awal
( )
t, , t[ ]
a b, ,( )
a 0= ∈ =
x f x x x (2.3)
Solusi numerik dari (2.3) dapat dicari dengan menggunakan formula Runge-Kutta orde 4 sebagai berikut:
(
)
1 6 1 22 23 4 k k h + = + + + + x x f f f f dengan(
)
(
)
1 2 1 3 2 4 3 , , 2 2 , 2 2 , k k k k k k k k t h h t h h t t h h = ⎛ ⎞ = ⎜ + + ⎟ ⎝ ⎠ ⎛ ⎞ = ⎜ + + ⎟ ⎝ ⎠ = + + f f x f f x f f f x f f f x f dan tk+1= +tk h untuk k=0,1,...,n−1; b a h n − = ; n= banyaknya iterasi. (Mathews, 1992) 2.4 Fungsi LogistikLaju pertumbuhan populasi tidak tetap tetapi bergantung pada ukuran populasi. Jika hal ini dijadikan asumsi, secara matematis berarti bahwa laju pertumbuhan populasi itu merupakan fungsi ukuran populasi
( )
dN
N f N
dt = =
dengan f
( )
N merupakan fungsi turun jikaN bertambah besar. Nilai f
( )
N membesar jika N mendekati nol. Bentuk paling sederhana dari fungsi f ialah bentuk linear yang dapat dibentuk sebagai berikut: jika N sangat kecil(
N →0)
, populasi tumbuhsecara eksponensial dan setiap individu yang ditambahkan ke dalam populasi akan mengakibatkan laju pertumbuhan per kapita turun sebesar konstanta a , maka persamaan diferensial untuk pertumbuhan populasi akan menjadi:
dN
r aN Ndt= −
dengan r dan a merupakan konstanta positif. Persamaan inilah yang disebut model logistik.
Ada cara lain yang dapat digunakan untuk memperoleh model logistik, yaitu secara eksplisit memasukkan faktor daya dukung lingkungan
( )
k . Jika dalam populasi ada Nindividu, maka lingkungan masih dapat mendukung k −N individu. Jadi masih ada bagian lingkungan yang masih bisa diisi, sebesar
(
k N)
k −
.
Bagian inilah yang sebanding dengan pertumbuhan perkapita. Oleh karena itu
(
k N)
dN r Ndt k − = atau dN rN(
k N)
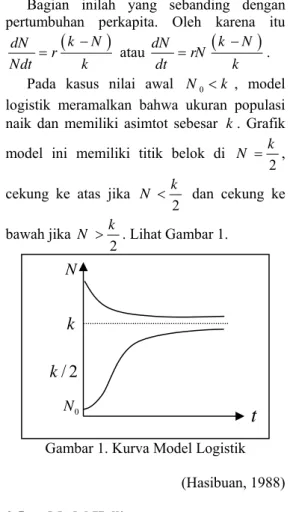
dt k − = .Pada kasus nilai awal N0 <k , model
logistik meramalkan bahwa ukuran populasi naik dan memiliki asimtot sebesar k. Grafik
model ini memiliki titik belok di
2
k
N = ,
cekung ke atas jika
2 k N < dan cekung ke bawah jika 2 k N > . Lihat Gambar 1.
Gambar 1. Kurva Model Logistik (Hasibuan, 1988) 2.5 Model Holling
Ada banyak model mangsa-pemangsa, salah satunya adalah model Holling. Pada model Holling tipe II, saat kepadatan populasi mangsa rendah, model tersebut menggambarkan tingkat pemangsaan sebagai fungsi naik dari populasi mangsa, sampai pada kepadatan mangsa yang tinggi di mana tingkat konsumsi mencapai titik jenuh. Hal ini disebabkan setiap pemangsa hanya dapat memakan sejumlah kecil mangsa pada saat satu unit waktu.
Model Holling tipe III juga menggambarkan tingkat pertumbuhan pemangsa. Tetapi pada model ini dapat terlihat jelas mengenai penurunan tingkat pemangsaan pada saat kepadatan mangsa rendah. Hal tersebut tidak dapat terlihat pada model Holling tipe II.
Adapun tingkat pertumbuhan mangsa pada model Holling tipe II dan III diberikan pada fungsi berikut: 0 N
/ 2
k
k
Nt
( )
( )
( ) 2 ( ) 2 1 1 II III ax F x bx ax F x bx = + = + di mana ( )IIF : fungsi Holling II.
(III)
F : fungsi Holling tipe III a , b : konstanta
x : jumlah populasi mangsa
(Eisenberg dan Maszle, 1995) 2.6 Nilai Eigen dan Vektor Eigen
Misalkan A adalah matriks n x n . Sebuah
vektor tak nol x di dalam n disebut vektor eigen dari A, jika untuk sebuah skalar λ ,
yang disebut nilai eigen dari A, berlaku:
λ =
Ax x. (2.4)
Vektor x disebut vektor eigen yang
bersesuaian dengan nilai eigen λ .
Untuk mencari nilai eigen dari matriks A
yang berukuran n x n , maka persamaan (2.4) dapat dituliskan sebagai berikut:
(
A−λI x)
=0. (2.5) dengan I matriks identitas.Persamaan (2.5) mempunyai solusi tak nol jika dan hanya jika:
(
)
det A−λI =0. (2.6) Persamaan (2.6) disebut persamaan karakteristik dari A.
(Anton, 1995) 2.7 Titik Singular
Diberikan sebuah titik
( )
a b, pada kurva(
,)
0f x y = . Titik
( )
a b merupakan titik , singular jika turunan parsial dari f terhadapx dan y keduanya bernilai nol pada titik
( )
a b , yaitu , fx( )
a b, = dan 0 fy( )
a b, = . 0 (Arfken, 1985) 2.8 Titik Tetap Diberikan SPD mandiri( )
, n x= f x x∈ (2.7) Titik *x disebut titik tetap jika f x
( )
* = . 0 Titik tetap disebut juga titik kritis atau titik kesetimbangan.(Tu, 1994) 2.9 Titik Tetap Stabil
Misalkan *
x adalah titik tetap SPD mandiri dan x t adalah sebuah solusi SPD
( )
mandiri dengan nilai awal x( )
0 =x0 dengan* 0
x ≠x . Titik x dikatakan titik tetap stabil * jika untuk sebarang radius ρ > terdapat 0
0
r> sedemikan sehingga jika posisi awal
0
x memenuhi x0−x* < maka solusi r
( )
x t memenuhi x t
( )
−x* < , untuk setiap ρ 0t> .
(Verhulst, 1990) 2.10 Titik Tetap Takstabil
Misalkan *
x adalah titik tetap sebuah SPD mandiri dan x t adalah sebuah solusi
( )
SPD mandiri dengan nilai awal x( )
0 =x0dengan *
0
x ≠x . Titik x dikatakan titik * tetap takstabil jika terdapat radius ρ>0
dengan ciri sebagai berikut: untuk sebarang 0
r> terdapat posisi awal x memenuhi 0
* 0 x −x < , berakibat solusi r x t
( )
memenuhi( )
* x t −x ≥ , untuk paling ρ sedikit satu t> . 0 (Verhulst, 1990)2.11 Pelinearan
Untuk suatu SPD taklinear, analisis kestabilannya dilakukan melalui model hasil pelinearan. Misalkan diberikan SPD taklinear sebagai berikut:
( )
=
x f x . (2.8)
Dengan menggunakan ekspansi Taylor untuk suatu titik tetap *
x , maka persamaan (2.8) dapat ditulis sebagai berikut:
( )
ϕ +
x = Ax x . (2.9)
Persamaan tersebut merupakan SPD taklinear dengan A adalah matriks Jacobi,
( )
*( )
* 1 1 1 11 1 1 1 x x n n n n n nn n Df x Df x f f x x a a f f a a x x = = = ∂ ∂ ⎡ ⎤ ⎢∂ ∂ ⎥ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = = ⎢ ⎥ ⎢∂ ∂ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢∂ ∂ ⎥ ⎣ ⎦ Adan ϕ
( )
x suku berorde tinggi yang bersifat( )
0
limϕ 0
→ =
x x . Akibatnya persamaan
diferensial (2.9) diberikan sebagai berikut:
=
x Ax . (2.10)
Persamaan (2.10) disebut pelinearan dari persamaan diferensial (2.8).
(Tu, 1994) 2.12 Analisis Kestabilan Titik Tetap
Misalkan diberikan SPD mandiri
( )
, n= ∈
x f x x (2.11)
Selanjutnya, dilakukan pelinearan di sekitar titik tetap sesuai dengan persamaan (2.9), sehingga diperoleh persamaan (2.10).
Analisis kestabilan SPD (2.11) dilakukan melalui analisis kestabilan SPD (2.10). Penentuan kestabilan titik tetap didapat dengan melihat nilai-nilai eigen matriks A,
yaitu: λi,i=1,...,n yang diperoleh dari
(
)
det A−λI =0.
Secara umum kestabilan titik tetap mempunyai tiga perilaku sebagai berikut: 1. Stabil, jika
a. Setiap nilai eigen real adalah negatif (λi <0 untuk setiap i). b. Setiap nilai eigen kompleks
memiliki negatif bagian real atau sama dengan nol, (Re
( )
λi ≤0untuk setiap i).
2. Takstabil, jika
a. Setiap nilai eigen real adalah positif atau sama dengan nol (λi ≥0 untuk setiap i).
b. Setiap nilai eigen kompleks memiliki positif bagian real, (Re
( )
λi >0 untuk setiap i).3. Sadel, jika
Perkalian dua buah nilai eigen real sembarang adalah negatif (λ λ < untuk i j 0
i dan j sembarang).
(Tu, 1994) 2.13 Invarian
Misalkan E merupakan himpunan bagian
terbuka dari n, misal 1
( )
E menyatakanturunan parsial i j f x ∂ ∂ , dengan i j, = …1, ,n yang kontinu di E, dan misalkan φt :E →E merupakan aliran dari sistem taklinear dari persamaan (2.8) yaitu trayektori fase dari solusi persamaan tersebut. Sebuah himpunan
S ⊂E disebut invarian jika φt
( )
S ⊂ dan S S disebut invarian positif (atau negatif) jika( )
t S S
φ ⊂ untuk semua t ≥ (atau 0 t ≤ ). 0 (Perko, 1991) 2.14 Manifold
Misalkan E merupakan himpunan bagian
terbuka dari n, misal 1
( )
E ∈ f yaitu turunan parsial i j f x ∂ ∂ , dengan i j, = …1, ,n yang kontinu di E, dan misalkan φt :E →E merupakan aliran dari sistem taklinear dari persamaan (2.8) yaitu trayektori fase dari solusi persamaan tersebut. Misalkan bahwa
( )
0 =0f dan Df
( )
0 yaitu turunan fungsi dari f mempunyai k nilai eigen yang bagianrealnya bernilai negatif dan n k− nilai eigen yang bagian realnya bernilai positif. Maka terdapat suatu manifold S yang berdimensi
k yang terdiferensialkan dan bersinggungan dengan subruang stabil S
E dari sistem linear pada 0 sehingga untuk t ≥ , 0 φt
( )
S ⊂ S dan untuk setiap x0∈ , S lim t( )
0 0dan terdapat suatu manifold U yang berdimensi
(
n−k)
yang terdiferensialkandan bersinggungan dengan subruang takstabil U
E dari sistem linear pada 0 sehingga untuk
setiap t ≤ , 0 φt
( )
U ⊂U dan untuk setiap0 x ∈ , U lim t
( )
0 0 n→−∞φ x = . (Perko, 1991) 2.15 Invariant Manifolds Himpunan invariant n E⊂ dikatakan invariant manifold r(
r≥ jika 1)
Emerupakan manifold pada r.
(Wiggins, 1990) 2.16 Trayektori Fase
Diberikan solusi sistem persamaan diferensial seperti di bawah ini:
-3 -2 -1 1 2 3 x -3 -2 -1 1 2 3 y
Gambar 2. Medan Arah dan Potret Fase Dari Gambar 2 terlihat adanya lintasan yang ditempuh oleh solusi
(
x y seiring ,)
berjalannya waktu. Lintasan ini disebut trayektori fase. Sedangkan titik-titik ekuilibrium dan trayektori fase tipikal disebut potret fase.(Stewart, 1998)
III PEMBAHASAN
3.1 Perumusan Model
Dalam penulisan karya ilmiah ini, model Holling yang digunakan adalah tipe III. Model ini dipilih karena menggambarkan secara jelas penurunan tingkat pemangsaan pada saat kepadatan populasi mangsa yang rendah, di mana hal tersebut tidak terlihat pada model Holling tipe II.
Model mangsa-pemangsa yang mengikuti model Holling tipe III dalam karya ilmiah ini melibatkan satu mangsa dan dua pemangsa dapat dituliskan sebagai berikut:
2 2 2 2 1 2 2 2 1 , , 1, 2, i i i i i i i i i i i dS S S S rS m x dt K a S dx S x m x d x i dt a S = ⎛ ⎞ = = ⎜ − ⎟− + ⎝ ⎠ = = − = +
∑
(3.1) di mana: S : banyaknya mangsa. ix : banyaknya pemangsa ke-i. r : laju pertumbuhan intrinsik.
K : daya dukung lingkungan bagi mangsa.
i
m : laju kelahiran pemangsa ke-i.
i
a : konstanta kejenuhan pemangsa ke-i.
i
d : laju kematian pemangsa ke-i.
dengan r K m a d, , , ,i i i adalah parameter positif.
Sistem persamaan (3.1) di atas menggambarkan kepadatan dari mangsa dengan waktu t dilambangkan dengan S t
( )
,dan dua pemangsa pada waktu t yang
dilambangkan masing-masing dengan x t1
( )
,dan x t2
( )
.Bentuk dari fungsi pemangsa mengikuti model kurva logistik, maka jika S menuju tak
hingga, laju kelahiran pemangsa per kapita akan menuju mi. Dalam hal ini terlihat jelas bahwa pemangsa ke-i yang bertahan hidup membutuhkan laju kelahiran yang lebih tinggi dari laju kematian, asumsikan:
1 i i i m b d = > , i=1, 2
Oleh karena itu, harus dipertimbangkan pemangsa dengan konstanta kejenuhan ai
yang rendah; a1<a2 dengan populasi
pemangsa ke-i mulai berkembang hanya jika
ruas kanan pada persamaan ke dua pada sistem persamaan (3.1) adalah positif,