TUGAS AKHIR
SIMULASI RESPON KECEPATAN MOTOR DC UNTUK
MENCAPAI STEADY STATE DENGAN VARIASI FREKUENSI
PEMBAWA PADA PULSE WIDTH MODULATION (PWM)
DENGAN 3 TIPE MOTOR
DISUSUN OLEH :
NINO BINTANG MEIYANTO
E11.2002.00040
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS DIAN NUSWANTORO
2014
LEMBAR PERNYATAAN KEASLIAN SKRIPSI
Saya yang bertanda tangan dibawah ini :Nama : Nino Bintang Meiyanto
NIM : E11.2002.00040
Juruan : Teknik Elektro S1
Judul Skripsi : Simulasi Respon Kecepatan Motor DC Untuk Mencapai Steady State Dengan Variasi Frekuensi Pembawa Pada Pulse Width Modulation ( PWM ) Dengan 3 Tipe Motor
Menyatakan dengan sebenarnya bahwa penulisan Skripsi berdasarkan hasil penelitian, pemikiran dan pemaparan asli dari penulis sendiri, baik untuk naskah laporan maupun kegiatan yang tercantum sebagai bagian dari Skripsi ini. Jika terdapat karya orang lain, penulis akan mencantumkan sumber secara jelas.
Demikian pernyataan ini saya buat dengan sesungguhnya dan apabila dikemudian hari terdapat penyimpangan dan ketidakbenaran dalam pernyataan ini, maka saya bersedia menerima sanksi lain sesuai dengan norma yang berlaku diperguruan tinggi ini. Demikian pernyataan ini saya buat dalam keadaan sadar tanpa paksaan dari pihak manapun.
Semarang, 11 Agustus 2014 Yang membuat pernyataan,
ABSTRAK
Motor DC adalah motor yang digerakkan dengan arus searah (DC). Dalam pengaturan arah putaran motor menggunakan pengendali (controller). Dalam penelitian ini diuraikan bagaimana mengendalikan motor dengan PWM (Pulse Width Modulation), yang mana dilakukan dengan pendekatan pemodelan dan simulasi. Adapun PWM dalam penelitian ini dibangun dari PWM Generator pada simulink Matlab. Dengan menggunakan frekuensi yang berbeda menghasilkan amplitudo dan pencapaian putaran stabil dengan waktu yang berbeda pula.
Frekuensi pembawa yang digunakan dalam simulasi ini adalah 100Hz, 300Hz, 400Hz, 500Hz. Simulasi diaplikasikan untuk 3 model Motor DC dengan tipe yang berbeda.
Hasil simulasi menunjukkan perbedaan frekuensi pembawa pada PWM Generator tidak memberikan perbedaan yang nyata terhadap kecepatan ketiga jenis Motor DC yang digunakan.
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan atas berkat, rahmat, dan penyertaannya-Nya, penyusunan skripsi yang berjudul “Simulasi Respon Kecepatan Motor DC Untuk Mencapai Steady State Dengan Variasi Frekuensi Pembawa Pada Pulse Width Modulation ( PWM ) Dengan 3 Tipe Motor” dapat diselesaikan dengan baik.
Penulis menyadari bahwa dalam proses penulisan skripsi ini banyak mengalami kendala, namun berkat bantuan, bimbingan, kerjasama dari berbagai pihak sehingga kendala-kendala yang dihadapi tersebut dapat diatasi. Untuk itu penulis menyampaikan ucapan terima kasih dan penghargaan kepada :
1. Bapak Dr. Ir. Edi Noersasongko, M.Kom, selaku Rektor Universitas Dian Nuswantoro Semarang
2. Bapak Dr. Eng. Yuliman Purwanto, M.Eng, selaku Dekan Fakultas Teknik Universitas Dian Nuswantoro Semarang
3. Ibu Dr. Ir. Dian Retno Sawitri, MT, selaku Ketua Program Studi Teknik Elektro S1 Universtas Dian Nuswantoro yang telah memberikan dorongan dan semangat untuk segera menyelesaikan penyusunan skripsi ini.
4. Bapak Wisnu Adi.P, ST, M.Eng, selaku dosen pembimbing 1. 5. Bapak Herwin Suprijono, M.T, selaku dosen pembimbing 2.
6. Bapak dan Ibu Dosen serta Staf di Fakultas Teknik yang telah memberi bekal ilmu pengetahuan sehingga penulis dapat menyelesaikan studi dan menyelesaikan penulisan skripsi ini.
7. Keluarga Ir. Soetomo Sismowihardjo, Dipl.Ing, yang telah membantu pembiayaan kuliah penulis.
8. Lisa Fitri, istriku tercinta yang selalu memberi dukungan dalam segala hal. 9. Chanan Matthew Adanosa, anakku yang menjadi sumber motivasiku. 10. Teman-teman Program Studi Teknik Elektro angkatan 2002 seperjuangan.
11. Rekan-rekan GKJ Kertanegara yang telah mendukung penulisan skripsi ini. 12. Serta semua pihak yang tidak dapat penulis sebut satu persatu, yang telah
membantu dalam penyelesaian penulisan skripsi ini.
Akhirnya, dengan segala kerendahan hati penulis menyadari masih banyak terdapat kekurangan-kekurangan, sehingga penulis mengharapkan adanya saran dan kritik yang bersifat membangun demi kesempurnaan skripsi ini.
Semarang, 11 Agustus 2014
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN ... ii
LEMBAR PERNYATAAN KEASLIAN SKRIPSI ... iii
ABSTRAK ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xi
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah ... 1
1.2 Perumusan Masalah ... 2
1.3 Tujuan Penelitian ... 2
1.4 Batasan masalah ... 2
1.5 Manfaat penelitian ... 2
1.6 Sistematika pemulisan ... 3
BAB II TINJAUAN PUSTAKA 2.1 Motor DC ... 5
BAB III METODOLOGI PENELITIAN
3.1 Pemodelan Sistem ... 11 3.2 Langkah-langkah Simulasi ... 14 3.3 Simulasi dengan Frekuensi pada Model PWM Motor DC... 22 BAB IV ANALISA HASIL SIMULASI
4.1 Motor DC 1 ... 23 4.2 Motor DC 2 ... 31 4.3 Motor DC 3 ... 39 BAB V PENUTUP 5.1 Kesimpulan ... ... 45 5.2 Saran ... ... 45 DAFTAR PUSTAKA ………... ... 46
DAFTAR GAMBAR
Gambar 2.1. Motor DC sederhana ... 6
Gambar 2.2. Sinyal PWM ... 8
Gambar 2.3. Sinyal PWM dengan variasi duty cycle ... 8
Gambar 2.4. PWM analog dengan Op-amp ... 9
Gambar 2.5. Pembentukan sinyal PWM ... 9
Gambar 2.6. Gambar PWM sederhana ... 10
Gambar 3.1. Model Fisik Motor DC ... 11
Gambar 3.2. Model Motor DC ... 13
Gambar 3.3. Bagan Perencanaan Sistem... 14
Gambar 3.4. Simulink Library PWM Generator ... 15
Gambar 3.5. MatLab R2010a ... 15
Gambar 3.6. Simulink Library Browse ... 16
Gambar 3.7. New Model ... 16
Gambar 3.8. Simulink Library Browser Subsystem ... 20
Gambar 3.9. Simulink Library Step ... 20
Gambar 3.10. Simulink Library Scope ... 21
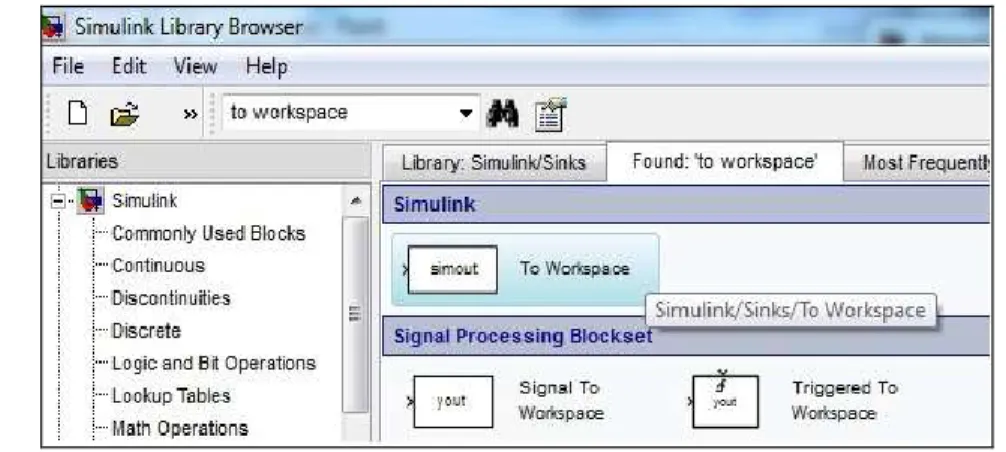
Gambar 3.11. Simulink Library To Workspace ... 21
Gambar 3.12. Command History ... 22
Gambar 4.1. Hasil Masukan Frekuensi 100 Hz Pada Motor DC 1 ... 24
Gambar 4.3. Hasil Masukan Frekuensi 400 Hz Pada Motor DC 1 ... 26
Gambar 4.4. Hasil Masukan Frekuensi 500 Hz Pada Motor DC 1 ... 27
Gambar 4.5. Hasil Simulasi Pada Motor DC 1 ... 28
Gambar 4.6. Perbesaran Shoot 1 Pada Motor DC 1 ... 29
Gambar 4.6. Perbesaran Shoot 2 Pada Motor DC 1 ... 30
Gambar 4.7. Perbesaran Steady State Pada Motor DC 1 ... 31
Gambar 4.8. Hasil Masukan Frekuensi 100 Hz Pada Motor DC 2 ... 32
Gambar 4.9. Hasil Masukan Frekuensi 300 Hz Pada Motor DC 2 ... 33
Gambar 4.10. Hasil Masukan Frekuensi 400 Hz Pada Motor DC 2 ... 34
Gambar 4.11. Hasil Masukan Frekuensi 500 Hz Pada Motor DC 2 ... 35
Gambar 4.12. Hasil Simulasi Pada Motor DC 2 ... 36
Gambar 4.13. Perbesaran Shoot Pada Motor DC 2 ... 37
Gambar 4.14. Perbesaran Steady State Pada Motor DC 2 ... 38
Gambar 4.15. Hasil Masukan Frekuensi 100 Hz Pada Motor DC 3 ... 39
Gambar 4.16. Hasil Masukan Frekuensi 300 Hz Pada Motor DC 3 ... 40
Gambar 4.17. Hasil Masukan Frekuensi 400 Hz Pada Motor DC 3 ... 41
Gambar 4.18. Hasil Masukan Frekuensi 500 Hz Pada Motor DC 3 ... 42
DAFTAR TABEL
Tabel 3.1. Keterangan Simulink pada Motor DC ... 19
Tabel 4.1. Hasil Simulasi Motor DC 1 ... 28
Tabel 4.2. Hasil Simulasi Motor DC 2 ... 36
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Motor DC banyak digunakan di berbagai bidang mulai dari peralatan industri sampai peralatan rumah tangga. Perkembangan teknologi elektronik sekarang ini memungkinkan dibuat perangkat pengendali dengan ukuran yang kecil akan tetapi memiliki kemampuan komputasi, kecepatan dan keandalan serta efisiensi daya yang tinggi.
Motor DC memiliki jenis yang beragam dari tipe magnet permanen, seri, shunt. Motor DC diimplementasikan berdasarkan jenis magnet yang digunakan. Kelebihan motor DC memiliki torsi yang tinggi, tidak memiliki kerugian daya reaktif dan tidak menimbulkan harmonisa pada sistem tenaga listrik yang mensuplynya, motor DC juga memilki akurasi kontrol yang tinggi, sehingga sering digunakan untuk aplikasi servo.
Penggunaan Motor DC saat ini sangatlah luas. Untuk mengimbangi hal tersebut diperlukan peralatan tambahan agar Motor DC dapat bekerja sesuai dengan kebutuhan para penggunanya. Peralatan elektronika daya dapat digunakan untuk mengendalikan kinerja Motor DC, selain itu dapat juga memperlus daerah kerjanya.
Salah satu metode untuk mengendalikan putaran Motor DC adalah menggunakan teknik PWM. Metode PWM (Pulse Width Modulation) adalah metode yang efektif untuk mengendalikan kecepatan Motor DC. Teknik PWM ini bekerja dengan cara mengatur gelombang persegi yang digunakan untuk mensuplay Motor DC dengan pulsa High dan Low.
Sebagian besar peralatan industri yang menggunakan Motor DC menggunakan PWM sebagai alat untuk mengendalikan kinerja dari Motor DC.
Sesuai dengan namanya Pulse Width Modulation, maka dalam penerapannya sinyal teganganlah yang dirubah lebarnya. Sistem pengontrolan dengan PWM ini merupakan sistem digital, yang jauh lebih efisien jika dibandingkan dengan sistem konvensional.
Pembuatan tugas akhir ini sebenarnya untuk mengetahui hubungan antara perubahan frekuensi pada PWM dengan kecepatan Motor DC.
1.2. Perumusan Masalah
Perumusan masalah dalam penelitian ini adalah :
Bagaimana perubahan frekuensi pembawa pada PWM dalam menjaga kecepatan dan mengatur kecepatan Motor DC sehingga dapat meningkatkan kinerja Motor DC. 1.3. Tujuan Penelitian
Adapun tujuan tugas akhir yang ingin dicapai adalah:
Mengetahui pengaruh frekuensi pembawa pada PWM terhadap pengaturan kecepatan Motor DC.
1.4. Batasan Masalah
1. Menggunakan 3 variasi tipe motor.
2. Menggunakan 4 variasi frekuensi: 100 Hz, 300 Hz, 400 Hz, 500 Hz.
1.5. Manfaat Penelitian
Manfaat progam ini dapat dibagi beberapa kepentingan yaitu: 1. Bagi Mahasiswa
a. Penyelenggara progam ini merupakan kegiatan ilmiah guna mempersiapkan mahasiswa menjadi kreatif, inovatif, serta produktif. Sehingga diharapkan dapat dihasilkan produk yang menjadi landasan, selanjtnya mahasiswa untuk berkarya kreatif setelah lulus dan berguna di masyarakat.
b. Membentuk mahasiswa yang trampil, propesional dan bertanggung jawab terhadap perkembangan ilmu pengetahuan dan teknologi serta dapat
mengaplikasikan teori yang telah didapat di bangku perkuliahan. 2. Bagi instansi (Universitas Dian Nuswantoro)
a. Di harapkan peneitian ini dapat bermanfaat dan memberikan sumbangan pikiran bagi universitas
b. Penelitian ini semoga dapat bermanfaat untuk penelitian selanjutnya dalam segmen yang berbeda.
c. Diharapkan dapat bermanfaat buat mahasiswa lain sebagai bahan reverensi dalam mengambil Tugas Akhir selanjutnya.
3. Bagi pengguna
a. Membantu bagi para penguna yang ingin mengatur putaran posisi motor DC untuk membantu menyelesaikan kegiatan sehari hari.
b. Menumbuhkembangkan jiwa peneliti bagi masyarakat umum terhadap berbagai macam perkembangan teknologi elektronika.
1.6. Sistematika Penulisan
Sistematika penulisan skripsi ini diantaranya adalah : BAB I : PENDAHULUAN
Berisi tentang penyusunan makalah mulai dari latar belakang masalah, perumusan masalah, tujuan penulisan, batasan masalah, manfaat penelitian, sistematika penulisan skripsi.
BAB II : TINJAUAN PUSTAKA
Menjelaskan mengenai landasan teori yang digunakan dalam simulasi Model Motor DC PWM.
BAB III : METODOLOGI PENELITIAN
Berisi tentang perancangan dan penjelasan cara kerja rangkaian model Motor DC PWM yang menggunakan jumlah frekuensi yang bervariasi.
BAB IV : ANALISIS HASIL SIMULASI
Berisi tentang analisis hasil simulasi model Motor DC PWM dengan frekuensi yang bervariasi.
BAB V : PENUTUP
Berisi kesimpulan beserta saran mengenai pembuatan model Motor DC PWM.
BAB II
TINJAUAN PUSTAKA
2.1. Motor DC
Motor DC merupakan motor listrik yang disuplai dari catu daya tegangan searah atau tegangan DC. Motor DC merupakan suatu perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik dari motor ini seringkali digunakan di rumah - rumah pada penggunaan mixer, bor listrik, kipas angin, dll. Sedangkan pada industri, motor listrik digunakan untuk menggerakan kompresor, mengangkat material, dll. Motor listrik dalam dunia industri juga disebut “kuda kerja”, sebab penggunaan beban listriknya yang cukup besar yaitu sekitar 70% dari penggunaan beban total.
Bagian- bagian motor DC berupa kumparan medan menerima energi listrik dari catu daya untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.1. Motor DC Sederhana
Pada Gambar 2.1. Catu tegangan DC dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
Sebuah motor menghasilkan keluaran berupa tenaga putar atau torque yang dipengaruhi oleh kecepatan motor tersebut, atau yang disebut juga dengan beban motor. Adapun beberapa kategori beban diantaranya:
1. Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan.
2. Beban dengan variabel torque adalah beban dengan torque yang bervariasi dengan kecepatn operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan).
3. Beban dengan energi konstan adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.2. Pulse Width Modulation (PWM)
Pulse Width Modulation (PWM) adalah sebuah cara memanipulasi lebar
sinyal yang dinyatakan dengan pulsa dalam suatu perioda, untuk mendapatkan tegangan rata-rata yang berbeda. Istilah penting yang berhubungan dengan PWM adalah priode (T) dimana waktu yang dibutuhkan dalam satu silkus, frekuensi(f) adalah banyaknya siklus yang tejadi dalam kurun waktu per detik (Hz) sedangkan duty cycle merupakan perbandingkan antara durasi pulsa ( ) dengan priode (T).
Umumnya PWM digunakan dalam industry. Banyak sistem kontrol otomotif menggunakan PWM yang secara efektif mengatur tegangan batrai yang diterapkan pada actuator. Penggunaan PWM yang sederhana dan biaya redah dibandingkan dengan solusi regulator tegangan secara hardware, membuatnya menjadi pilihan menarik untuk mengendalikan actuator. Pada mikrokontroler PWM biasanya diaplikasikan pengendalian kecepatan motor atau pun pengendalian Motor Servo dan jenis motor yang lain. Salah satu jenis motor yang sering digunakan sebagai penggerak adalah motor DC yang secara luas diaplikasika dengan kecepatan yang bervariasi dengan respon yang dinamis dan keadaan stabil. Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap, namun memiliki lebar pulsa yang bervariasi. Lebar Pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Artinya, Sinyal PWM memiliki frekuensi gelombang yang tetap namun duty cycle bervariasi (antara 0% hingga 100%). Duty cycle adalah perbandingan antara durasi pulsa ( ) dengan priode (T) dari sebuah sinyal, dimana D adalah duty cycle(%).
Gambar 2.2. Sinyal PWM
PWM dalam kontrol motor akan mempengaruhi besarnya tegangan yang diberikan oleh suplai dengan merata-rata tegangan suplai motor. Dimana pada saat Ton motor akan mendapatkan suplai arus atau tegangan langsung sedangkan pada saat
Toff motor tidak mendapatkan suplai tegangan atau arus. Semakin besar Duty cycle
maka semakin lama logika high sehingga motor semakin besar suplai motor. Sehingga jika Duty cycle 100% diberikan pada motor, maka motor akan berputar dengan kecepatan maksikmal. Dari Gambar 2.2. dapat di cari besarnya duty cycle sebagai persamaan 2.1. Duty cycle = off on on t T T (2.1)
Gambar 2.3. Sinyal PWM dengan variasi duty cycle
Pada Gambar 2.3. menunjukan sinyal PWM dengan beberapa variasi yaitu PWM dengan siklus 10%, 50% dan 90%. Dari ketiga variasi sinyal PWM akan menyediakan tiga nilai tegangan yang berbeda pada motor.
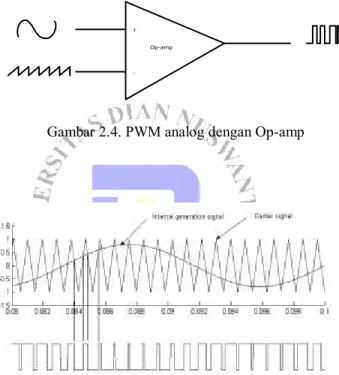
Sinyal PWM dapat dibangkitkan dengan metode analog, menggunakan rangkaian op-amp seperti pada Gambar 2.4. Seperti yang telah dijelaskan pada penulis sebelumnya, proses pembangkitan sinyal PWM dilakukan dengan cara membandingkan sinyal sinusoidal dengan sinyal referensi gelombang segitiga yang membentuk sinyal kotak.
+
-Op-amp
Gambar 2.4. PWM analog dengan Op-amp
Gambar 2.5. Pembentukan sinyal PWM
Cara kerja dari Gambar 2.5. adalah membandingkan gelombang sinyal gergaji dengan sinyal referensi. Pada saat nilai tegangan referensi lebih besar dari tegangan carrier (gigi gergaji) maka output comparator akan bernilai high. Namun saat tegangan referensi bernilai lebih kecil dari tegangan carrier, maka output comparator akan bernilai low.
Dalam program Simulink pada Matlab, PWM dapat disimulasikan dengan menggunakan komponen pada Matlab. Selain dengan memanfaatkan library bawaan pada Matlab, PWM dapat dibuat dengan komponen yang tersedia di Simulink. Gambar 2.6. menunjukkan PWM sederhana dengan menggunakan Simulink
BAB III
METODOLOGI PENELITIAN
3.1 Pemodelan Sistem 3.1.1. Model Fisik
Gambar 3.1. Model Fisik Motor DC
Motor DC mengubah tenaga listrik menjadi energi mekanik. oleh karena itu, motor ini membutuhkan suplai berupa tegangan listrik agar bisa bekerja. Bagian- bagian dari motor DC itu sendiri ada dua yaitu stator dan rotor. Stator adalah bagian yang tidak berputar, di bagian inilah kumparan medan terjadi. Rotor adalah bagian yang berputar dan sering disebut sebagai kumparan jangkar.
3.1.2. Model Matematis
Perancangan model matematis dilakukan untuk mendapatkan perhitungan dalam analisis respon transient dan respon stady state pada kecepatan Motor DC dengan menggunakan fungsi alih ( tranfer function ) pada model fisik Motor DC seperti yang ditunjukkan pada Gambar 3.1.
Model motor DC diatas dikombinasikan dengan struktur listrik dan struktur mekanik. Struktur listrik adalah model rangkaian listrik dari armatur yaitu tahanan ( R ) yang terhubung seri dengan induktansi ( L ). Struktur mekanik adalah momen inersia di rotor dan beban serta gesekan yang terjadi karena ada pergerakan mekanik. Pada model motor DC diatas mempunyai persamaan matematis, Torka motor ( T ) berbanding lurus dengan arus amatur ( i ) dan konstanta ( K ) yang ditunjukkan pada persamaan 3.1. Dan Medan magnet ( Vb ) berhubungan dengan kecepatan putar
ditunjukkan pada persamaan 3.2.
... (3.1) ... (3.2) dengan : T = torka motor ( Nm ) K = konstanta i = arus ( Ampere ) Vb = medan magnet ( V )
d = selisih teta ( rad ) dt= selisih waktu ( s )
Persamaan yang dihasilkan dari model fisik motor DC menurut hukum Newton dan Kirchoff dinyatakan oleh persamaan 3.3 dan 3.4.:
... (3.4) Dengan : R = tahanan armatur ( Ω ) L = induktansi armatur ( H ) Vs = Tegangan sumber ( V )
Dari persamaan-persamaan di atas, maka langkah selanjutnya memodelkan Motor DC sehingga terbentuk Gambar 3.2.
3.1.3. Model Simulink
Dalam perencanaan sistem ini akan dibahas tentang kebutuhan-kebutuhan yang harus dipenuhi agar alat ini dapat bekerja sesuai dengan apa yang direncanakan, yaitu melihat pengaruh perubahan frekuensi PWM terhadap kecepatan Motor DC. Yang menjadi permasalahan adalah bagaimana menghubungkan antara PWM dan Motor DC dalam sebuah simulasi, maka dari itu digunakan software MatLab R2010a. Software MatLab dipilih karena mudah dalam memanipulasi struktur matriks dan perhitungan berbagai operasi matriks yang meliputi penjumlahan, pengurangan, perkalian, invers, dan fungsi matriks lainnya. MatLab juga menyediakan fasilitas untuk memplot struktur gambar. Pada simulasi ini penulis akan mencoba simulasi seperti pada Gambar 3.3.
Gambar 3.3. Bagan Perencanaan Sistem
3.2. Langkah-Langkah Simulasi 3.2.1. Metode Kendali PWM
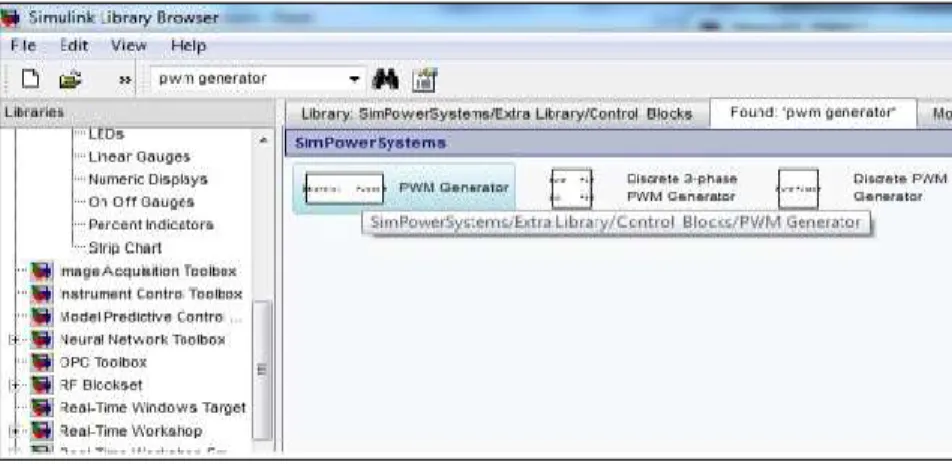
Membuat model PWM diawali dengan mencari icon PWM Generator pada simulink library seperti pada Gambar 3.4., kemudian di drag (tarik) ke dalam model Motor DC yang telah di buat.
Gambar 3.4. Simulink Library PWM Generator
3.2.2. Pembuatan Simulink Motor DC
Simulink Motor DC adalah simulasi pembuatan rangkaian Motor DC. Adapun proses pembuatannya adalah yang pertama membuka aplikasi MatLab R2010a, seperti Gambar 3.5.
Gambar 3.5. MatLab R2010a
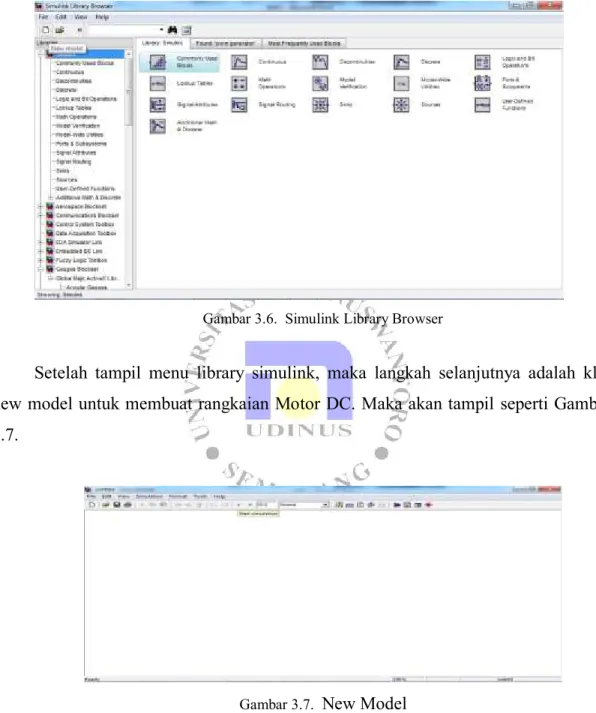
Setelah aplikasi terbuka, selanjutnya klik simulink pada menu toolbar maka akan tampil seperti Gambar 3.6.
Gambar 3.6. Simulink Library Browser
Setelah tampil menu library simulink, maka langkah selanjutnya adalah klik new model untuk membuat rangkaian Motor DC. Maka akan tampil seperti Gambar 3.7.
Gambar 3.7. New Model
Langkah selanjutnya pada menu new model dibuat rangkaian Motor DC. Berikut akan dijelaskan proses pembuatan rangkaian Motor DC.
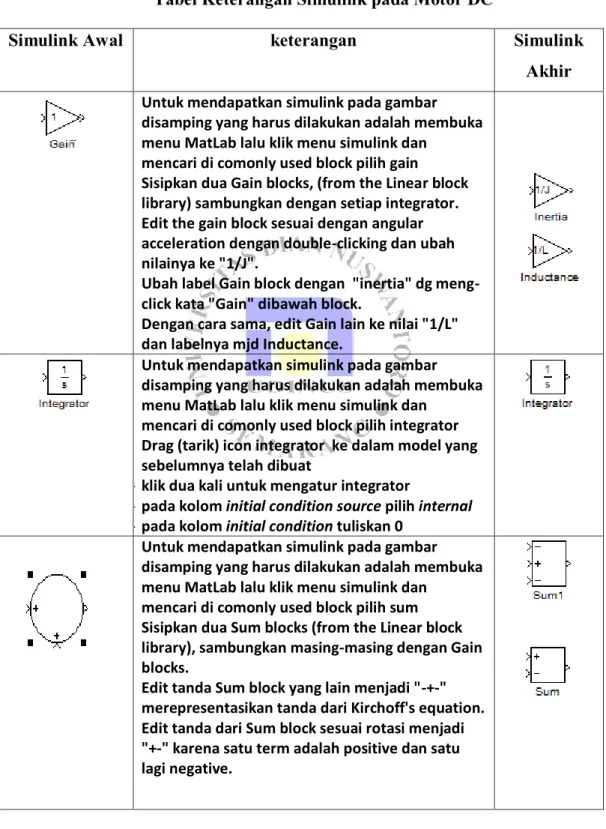
Tabel Keterangan Simulink pada Motor DC
Simulink Awal keterangan Simulink
Akhir - Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari di comonly used block pilih gain
- Sisipkan dua Gain blocks, (from the Linear block
library) sambungkan dengan setiap integrator.
- Edit the gain block sesuai dengan angular
acceleration dengan double-clicking dan ubah nilainya ke "1/J".
- Ubah label Gain block dengan "inertia" dg
meng-click kata "Gain" dibawah block.
- Dengan cara sama, edit Gain lain ke nilai "1/L"
dan labelnya mjd Inductance.
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari di comonly used block pilih integrator
- Drag (tarik) icon integrator ke dalam model yang
sebelumnya telah dibuat
- klik dua kali untuk mengatur integrator
- pada kolom initial condition source pilih internal - pada kolom initial condition tuliskan 0
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari di comonly used block pilih sum
- Sisipkan dua Sum blocks (from the Linear block
library), sambungkan masing-masing dengan Gain blocks.
- Edit tanda Sum block yang lain menjadi "-+-"
merepresentasikan tanda dari Kirchoff's equation.
- Edit tanda dari Sum block sesuai rotasi menjadi
"+-" karena satu term adalah positive dan satu lagi negative.
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari di comonly used block pilih gain
- Sisipkan gain block dibawah inertia block, pilih
dengan click tunggal, dan pilih Flip from the Format menu (or type Ctrl-F) untuk memutar dari kiri ke kanan.
- Atur nilai gain ke “b” dan ganti namanya menjadi
"damping".
- Hubungkan rotational integrator's output dengan
input dari damping gain block.
- Buat garis dari damping gain output ke negative
input dari rotational Sum block.
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari di comonly used block pilih gain
- Sisipkan sebuah gain block ke input positif dari
blok Sum dengan sebuah garis.
- Edit nilai K yang merepresentasikan konstanta
motor dan beri nama “Kt”.
- Lanjutkan menggambar garis dari integrator arus
dan hubungkan dengan blok gain “Kt”.
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari di comonly used block pilih gain
- Sisipkan gain block diatas inductance block, putar
(flip) dari kiri ke kanan (left-to-right).
- Atur nilai gain ke "R" dan ubah namanya menjadi
"Resistance".
- Hubungkan current integrator's output dan input
dari resistance gain block.
- Buat garis dari resistance gain output ke negative
Re sistensi
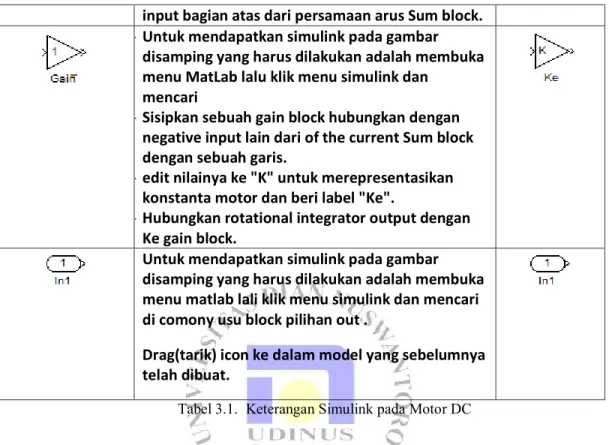
Tabel 3.1. Keterangan Simulink pada Motor DC
Untuk mengetahui rangkaian simulink ada yang salah (error), pada bagan tool bar klik gambar segitiga hitam / RUN. Dari proses RUN akan ditunjukkan letak error pada rangkaian model motor DC sehingga memudahkan penyelesaian secara benar dalam pembuatan rangkaian. Setelah selasai pembuatan kemudian file di simpan dengan format .mdl
input bagian atas dari persamaan arus Sum block.
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu MatLab lalu klik menu simulink dan
mencari
- Sisipkan sebuah gain block hubungkan dengan
negative input lain dari of the current Sum block dengan sebuah garis.
- edit nilainya ke "K" untuk merepresentasikan
konstanta motor dan beri label "Ke".
- Hubungkan rotational integrator output dengan
Ke gain block.
- Untuk mendapatkan simulink pada gambar
disamping yang harus dilakukan adalah membuka menu matlab lali klik menu simulink dan mencari di comony usu block pilihan out .
- Drag(tarik) icon ke dalam model yang sebelumnya
3.2.2.1. Pembuatan Subsistem Motor DC
Gambar 3.8. Simulink Library Browser Subsystem
Proses pembuatan Subsistem Motor DC dilakukan dengan cara mencari icon subsistem Motor DC dari simulink library seperti Gambar 3.8., kemudian drag (tarik) ke dalam new model selanjutnya copy file Motor DC yang sebelumnya sudah disimpan lalu paste ke dalam icon subsistem.
3.2.2.2. Model Step
Membuat model step dilakukan dengan mencari icon step pada simulink library seperti Gambar 3.9., kemudian di drag (tarik) ke dalam model Motor DC yang telah dibuat sebelumnya.
3.2.2.3. Model Scope
Gambar 3.10. Simulink Library Scope
Membuat model Scope dilakukan dengan mencari icon scope pada simulink library seperti Gambar 3.10., kemudian di drag (tarik) ke dalam model Motor DC yang telah dibuat sebelumnya.
3.2.2.4. Model Signal
Membuat model signal dilakukan dengan mencari icon signal pada simulink library seperti Gambar 3.11., kemudian di drag (tarik) ke dalam model Motor DC yang telah dibuat sebelumnya.
3.3. Simulasi dengan Frekuensi pada Model PWM Motor DC
Untuk menjalankan Simulasi pemodelan dari motor DC dengan PWM di atas harus menginputkan nilai dari J, R, K, b, dan L pada command window seperti Gambar 3.12.
Gambar 3.12. Command History
Pada proses selanjutnya yang harus dilakukan adalah memberi inputan frekuensi pada parameter block PWM dengan klik dua kali pada icon PWM, jika semua sudah diselesaikan, pada model motor DC dengan PWM di klik tombol segitiga hitam atau run pada tool bar.
Setelah berjalan dengan normal dapat dilihat hasil dari kinerja simulasi dari motor DC yang berupa sinyal pulse pada scope.
BAB IV
ANALISIS HASIL SIMULASI
Simulasi pada skripsi ini dilakukan dengan cara memasukkan 4 macam frekuensi yaitu 100 Hz, 300 Hz, 400 Hz, 500 Hz dengan menggunakan 3 variasi Motor DC. Nilai-nilai yang akan dianalisis pada simulasi ini adalah kecepatan putar rotor dan waktu putar serta melihat perbandingan hasil loop dari simulasi Model PWM Motor DC. Untuk mempermudah proses analisis, pembahasan akan dilakukan secara terpisah untuk setiap percobaan se s u ai d en g a n f r e k ue n si n ya yang kemudian juga akan dilakukan analisis berdasarkan masing – masing masukan frekuensi simulasi.
4.1. Motor DC 1
Nilai yang akan diinputkan adalah: J = 0,1 kg m2
R = 0,5 Ω K = 2,5
b = 0,016 N m s/rads L = 0,04 H
4.1.1. Simulasi Masukan Frekuensi 100 Hz
Pada simulasi ini masukan frekuensinya adalah 100 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.1.
Gambar 4.1. Hasil Masukan Frekuensi 100 Hz Pada Motor DC 1
Melihat dari hasil simulasi yang menggunakan frekuensi 100 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,607 rad/s dalam waktu 0,0775 s, kemudian turun hingga kecepatan putar terendah pada 0,637 rad/s dalam waktu 0,16 s. Putaran motor yang dihasilkan dari frekuensi 100 Hz ini stabil pada kecepatan 1 rad/s dalam waktu 0,855 s.
4.1.2. Simulasi Masukan Frekuensi 300 Hz
Pada simulasi ini masukan frekuensinya adalah 300 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.2.
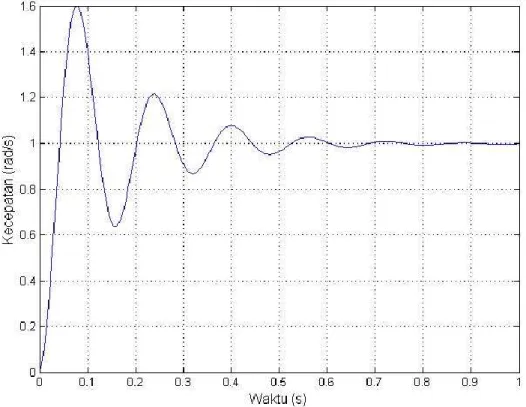
Gambar 4.2. Hasil Masukan Frekuensi 300 Hz Pada Motor DC 1
Melihat dari hasil simulasi yang menggunakan frekuensi 300 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,599 rad/s dalam waktu 0,079 s, kemudian turun hingga kecepatan putar terendah pada 0,628 rad/s dalam waktu 0,156 s. Putaran motor yang dihasilkan dari frekuensi 300 Hz ini stabil pada kecepatan 1 rad/s dalam waktu 0,855 s.
4.1.3. Simulasi Masukan Frekuensi 400 Hz
Pada simulasi ini masukan frekuensinya adalah 400 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.3.
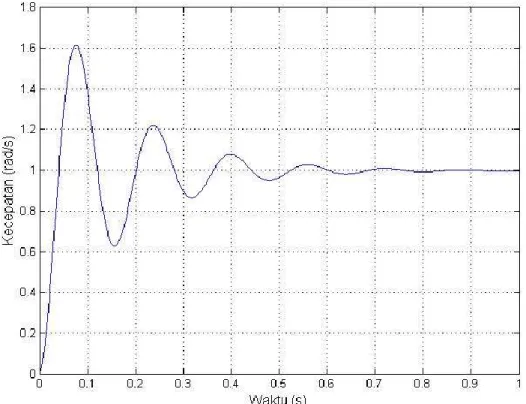
Gambar 4.3. Hasil Masukan Frekuensi 400 Hz Pada Motor DC 1
Melihat dari hasil simulasi yang menggunakan frekuensi 400 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,599 rad/s dalam waktu 0,079 s, kemudian turun hingga kecepatan putar terendah pada 0,638 rad/s dalam waktu 0,16 s. Putaran motor yang dihasilkan dari frekuensi 400 Hz ini stabil pada kecepatan 1 rad/s dalam waktu 0,856 s.
4.1.4. Simulasi Masukan Frekuensi 500 Hz
Pada simulasi ini masukan frekuensinya adalah 500 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.4.
Gambar 4.4. Hasil Masukan Frekuensi 500 Hz Pada Motor DC 1
Melihat dari hasil simulasi yang menggunakan frekuensi 500 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,599 rad/s dalam waktu 0,079 s, kemudian turun hingga kecepatan putar terendah pada 0,638 rad/s dalam waktu 0,16 s. Putaran motor yang dihasilkan dari frekuensi 500 Hz ini stabil pada kecepatan 1 rad/s dalam waktu 0,855 s.
Simulasi Frekuensi ( Hz )
Kecepatan Tertinggi Kecepatan Stabil Kecepatan ( rad/s ) Waktu ( s ) Kecepatan ( rad/s ) Waktu ( s ) 1. 100 1,607 0,0775 1 0,855 2. 300 1,599 0,079 1 0,855 3. 400 1,599 0,079 1 0,856 4. 500 1,599 0,079 1 0,855
Tabel 4.1. Hasil Simulasi Motor DC 1
Dari 4 simulasi diatas digabungkan menjadi 1 gambar. Hasil yang didapatkan adalah seperti Gambar 4.5.
Adapun Shoot 1 bila diperbesar akan terlihat seperti Gambar 4.6.
Gambar 4.6. Perbesaran Shoot 1 Pada Motor DC 1
Pada frekuensi 100 Hz respon Motor DC lebih cepat, namun over shoot pertamanya lebih tinggi. Sedang pada 3 frekuensi yang lain over shoot nya relatif hampir sama.
Shoot 2 bila diperbesar akan terlihat seperti Gambar 4.7.
Gambar 4.7. Perbesaran Shoot 2 Pada Motor DC 1
Pada frekuensi 100 Hz Motor DC over shoot keduanya kembali lebih tinggi. Sedang pada 3 frekuensi yang lain over shoot nya relatif hampir sama.
Sedang Steady State bila diperbesar akan terlihat seperti Gambar 4.8.
Gambar 4.8. Perbesaran Steady State Pada Motor DC 1
Steady State yang dicapai pada 4 frekuensi tersebut hampir sama, namun pada frekuensi 100Hz terdapat riak yang agak kasar.
4.2. Motor DC 2
Nilai yang akan diinputkan adalah: J = 0,01 kg m2
R = 5,2 Ω K = 0,75
b = 0,02 N m s/rads L = 1,1 H
4.2.1. Simulasi Masukan Frekuensi 100 Hz
Pada simulasi ini masukan frekuensinya adalah 100 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.9.
Gambar 4.9. Hasil Masukan Frekuensi 100 Hz Pada Motor DC 2
Melihat dari hasil simulasi yang menggunakan frekuensi 100 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,254 rad/s dalam waktu 1,464 s. Putaran motor yang dihasilkan dari frekuensi 100 Hz ini stabil pada kecepatan 1,125 rad/s dalam waktu 2,66 s.
4.2.2. Simulasi Masukan Frekuensi 300 Hz
Pada simulasi ini masukan frekuensinya adalah 300 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.10.
Gambar 4.10. Hasil Masukan Frekuensi 300 Hz Pada Motor DC 2
Melihat dari hasil simulasi yang menggunakan frekuensi 300 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,253 rad/s dalam waktu 1,464 s. Putaran motor yang dihasilkan dari frekuensi 300 Hz ini stabil pada kecepatan 1,125 rad/s dalam waktu 2,66 s.
4.2.3. Simulasi Masukan Frekuensi 400 Hz
Pada simulasi ini masukan frekuensinya adalah 400 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.11.
Gambar 4.11. Hasil Masukan Frekuensi 400 Hz Pada Motor DC 2
Melihat dari hasil simulasi yang menggunakan frekuensi 400 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,253 rad/s dalam waktu 1,464 s. Putaran motor yang dihasilkan dari frekuensi 400 Hz ini stabil pada kecepatan 1,125 rad/s dalam waktu 2,66 s.
4.2.4. Simulasi Masukan Frekuensi 500 Hz
Pada simulasi ini masukan frekuensinya adalah 500 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.12.
Gambar 4.2.4. Hasil Masukan Frekuensi 500 Hz Pada Motor DC 2
Melihat dari hasil simulasi yang menggunakan frekuensi 500 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,253 rad/s dalam waktu 1,464 s. Putaran motor yang dihasilkan dari frekuensi 500 Hz ini stabil pada kecepatan 1,125 rad/s dalam waktu 2,66 s.
Simulasi Frekuensi ( Hz )
Kecepatan Tertinggi Kecepatan Stabil Kecepatan ( rad/s ) Waktu ( s ) Kecepatan ( rad/s ) Waktu ( s ) 1. 100 1,254 1,464 1,125 2,66 2. 300 1,253 1,464 1,125 2,66 3. 400 1,253 1,464 1,125 2,66 4. 500 1,253 1,464 1,125 2,66
Tabel 4.2. Hasil Simulasi Motor DC 2
Dari 4 simulasi diatas digabungkan menjadi 1 gambar. Hasil yang didapatkan adalah seperti Gambar 4.13.
Adapun Shoot nya bila diperbesar akan terlihat seperti Gambar 4.14.
Gambar 4.14. Perbesaran Shoot Pada Motor DC 2
Pada frekuensi 100 Hz, dengan waktu yang sama mengalami over shoot yang lebih tinggi.
Sedang Steady State nya bila diperbesar akan terlihat seperti Gambar 4.15.
. Gambar 4.15. Perbesaran Steady State Pada Motor DC 2
Pada gambar diatas, steady state nya berhimpitan. Ini menunjukkan bahwa dari keempat frekuensi yang dimasukkan, steady state nya hampir sama.
4.3. Motor DC 3
Nilai yang akan diinputkan adalah: J = 42,6 kg m2
R = 4,67 Ω K = 0,16
b = 14,7 N m s/rads L = 170 H
4.3.1. Simulasi Masukan Frekuensi 100 Hz
Pada simulasi ini masukan frekuensinya adalah 100 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.16.
Gambar 4.16. Hasil Masukan Frekuensi 100 Hz Pada Motor DC 3
Melihat dari hasil simulasi yang menggunakan frekuensi 100 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,165 rad/s dalam waktu 271 s, setelah itu putaran motor yang dihasilkan dari frekuensi 100 Hz ini stabil pada kecepatan tersebut.
4.3.2. Simulasi Masukan Frekuensi 300 Hz
Pada simulasi ini masukan frekuensinya adalah 300 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.17.
Gambar 4.17. Hasil Masukan Frekuensi 300 Hz Pada Motor DC 3
Melihat dari hasil simulasi yang menggunakan frekuensi 300 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,165 rad/s dalam waktu 270,8 s, setelah itu putaran motor yang dihasilkan dari frekuensi 300 Hz ini stabil pada kecepatan tersebut.
4.3.3. Simulasi Masukan Frekuensi 400 Hz
Pada simulasi ini masukan frekuensinya adalah 400 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.18.
Gambar 4.18. Hasil Masukan Frekuensi 400 Hz Pada Motor DC 3
Melihat dari hasil simulasi yang menggunakan frekuensi 400 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,165 rad/s dalam waktu 270,8 s, setelah itu putaran motor yang dihasilkan dari frekuensi 400 Hz ini stabil pada kecepatan tersebut.
4.3.4. Simulasi Masukan Frekuensi 500 Hz
Pada simulasi ini masukan frekuensinya adalah 500 Hz dengan penggunaan Model PWM Motor DC. Hasil yang didapatkan dari loop adalah seperti Gambar 4.19.
Gambar 4.19. Hasil Masukan Frekuensi 500 Hz Pada Motor DC 3
Melihat dari hasil simulasi yang menggunakan frekuensi 500 Hz dapat dianalisakan kecepatan putar motor saat start dari 0 hingga kecepatan putar tertinggi pada 1,165 rad/s dalam waktu 269,6 s, setelah itu putaran motor yang dihasilkan dari frekuensi 500 Hz ini stabil pada kecepatan tersebut.
Simulasi Frekuensi ( Hz )
Kecepatan Tertinggi Kecepatan Stabil Kecepatan ( rad/s ) Waktu ( s ) Kecepatan ( rad/s ) Waktu ( s ) 1. 100 1,165 271 1,165 271 2. 300 1,165 270,8 1,165 270,8 3. 400 1,165 270,8 1,165 270,8 4. 500 1,165 269,6 1,165 269,6
Tabel 4.3. Hasil Simulasi Motor DC 3
Dari 4 simulasi diatas digabungkan menjadi 1 gambar. Hasil yang didapatkan adalah seperti Gambar 4.20.
Dari Gambar 4.20. terlihat bahwa semua grafiknya berhimpitan. Hal ini menunjukkan bahwa dari keempat frekuensi yang dimasukkan mendapatkan hasil steady state yang sama.
Dari semua simulasi diatas, baik Motor DC 1, Motor DC 2, Motor DC 3 dapat dibuat tabel simulasi:
Frekuensi
( Hz ) Motor DC
Kecepatan Tertinggi Kecepatan Stabil Kecepatan ( rad/s ) Waktu ( s ) Kecepatan ( rad/s ) Waktu ( s ) 100 1 1,6 0,08 1 0,855 2 1,254 1,46 1,125 2,66 3 1,165 271 1,165 271 300 1 1,615 0,075 1 0,851 2 1,373 0,46 1,125 2,74 3 1,165 270,8 1,165 270,8 400 1 1,599 0,08 1 0,856 2 1,254 1,46 1,125 2,66 3 1,165 270,8 1,165 270,8 500 1 1,599 0,08 1 0,856 2 1,254 1,428 1,124 2,728 3 1,165 269,6 1,165 269,6
Tabel 4.4. Hasil Semua Simulasi
BAB V
PENUTUP
5.1. KesimpulanDari hasil analisis pada kegiatan simulasi Model Motor DC PWM menggunakan 4 frekuensi pembawa yang berbeda dan 3 variasi motor, maka penulis dapat menyimpulkan:
1. Pada Simulasi Motor 1 & 2, frekuensi 100 Hz terjadi over shoot yang lebih tinggi.
2. Pada ketiga Simulasi, frekuensi 300 Hz, 400Hz, 500 Hz over shoot dan steady state nya relatif sama.
5.2. Saran
Sebaiknya Simulasi mengatur kecepatan motor DC dengan PWM ini menggunakan perbandingan frekuensi pembawa yang lebih besar agar lebih detail mengetahui perbedaan nilai kecepatan dan waktu putaran motor DC.
DAFTAR PUSTAKA
[1] J. M. Patel, H. V. Hirvaniya, and M. Rathod, “Simulation and Analysis of Brushless DC Motor Based on Sinusoidal PWM Control,” Int. J. Innov. Res. Electr.
Electron. Instrum. CONTROL Eng., vol. 2, no. 3, pp. 1237 – 1238, Mar. 2014.
[2] Rudito Prayogo, “PENGATURAN PWM (Pulse Width Modulation) Dengan PLC.”
[3] Wenbo Zhang and Wei Zhan, “Sensitivity Analysis of Motor PWM Control,”
IAENG Int. Assoc. Eng. 2008.
[4] Zuhal, Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta: Gramedia, 1998.