No. 31 Vol.1 Thn. XVI April 2009 ISSN: 0854-8471
TeknikA 71
SIMULASI PENGATURAN KECEPATAN MOTOR INDUKSI
DENGAN METODA INDIRECT FIELD ORIENTED
CONTROL
Heru Dibyo Laksono
Jurusan Teknik Elektro Univeristas Andalas
Padang Sumatera Barat
ABSTRACT
Lebih dari 80 persen motor yang dipakai pada Industri menggunakan motor induksi. Motor induksi mempunyai kelebihan yaitu harganya yang murah tetapi pengendaliannya terbatas. Dengan metoda Field Oriented Control kinerja motor induksi dapat ditingkatkan seperti layaknya motor DC berpenguatan bebas. Field Oriented Control mampu mengendalikan arus fluks dan arus torka secara terpisah. Pengaturan secara vektor menghasilkan keluaran torka elektromagnetik, arus, tegangan dan kecepatan. yang dapat mencapai nilai referensi sistem pengaturan motor induksi tiga fasa. Pengendalian kecepatan dilakukan dengan mengendalikan fluks melalui arus stator, amplitudo dan fasa dari arus stator. Pengaturan kecepatan dengan metode Indirect Field Oriented Control tidak membutuhkan detektor fluks atau penghitung fluks, tetapi hanya membutuhkan penghitung slip. Faktor inilah yang menyebabkan metode ini lebih populer.
Keywords : Motor Induksi, Metoda Field Oriented Control, Arus Fluks, Arus
PENDAHULUAN
Dewasa ini penggunaan motor-motor listrik sudah banyak digunakan dalam kehidupan. Baik untuk rumah tangga, industri, transportasi dan lain-lain. Umumnya motor listrik yang digunakan terbagi dua jenis yaitu motor arus searah (motor DC) dan motor arus bolak-balik (motor AC). Pada mulanya untuk aplikasi pengaturan kecepatan, lebih banyak digunakan motor DC dibandingkan motor AC, karena pengaturan motor AC terutama motor induksi lebih sulit. Dengan berkembangnya ilmu elektronika daya, pengaturan motor induksi dapat teratasi. Disamping itu konstruksi motor induksi yang kuat, sederhana, murah, dan mudah dalam perawatan merupakan daya tarik tersendiri. Sehingga saat sekarang ini lebih dari 80% industri menggunakan motor induksi.
Pengontrolan kecepatan motor induksi dapat dibagi menjadi dua bagian utama, yaitu skalar kontrol dan vektor kontrol. Skalar kontrol yang didasarkan pada linearisasi persamaan nonlinier motor induksi di titik operasi keadaan mantap (steady state) serta dapat diimplementasikan dalam suatu keadaan dimana amplitudo dan frekuensi tegangan stator diatur dalam suatu rangkaian terbuka (open loop) agar V/Hz konstan. Parameter untuk skalar kontrol yang berhubungan dengan keadaan mantap (steady state), adalah magnitudo dan frekuensi (kecepatan sudut) tegangan, arus dan fluks linkage space vektor yang dikontrol. Sehingga, sistem kontrol ini tidak bekerja selama keadaan transient. Pola seperti ini diterapkan juga pada sistem multivariabel pada motor induksi sehingga tidak bisa menunjukkan hubungan antara input dan output serta akan menimbulkan permasalahan pengontrolan output seperti torka dan fluks.
Akibat adanya permasalahan diatas, maka dikembangkanlah suatu metode pengontrolan yang
disebut vektor kontrol. Vektor kontrol ini didasarkan pada keadaan peralihan (transient). Oleh sebab itu metode pengontrolan ini tidak hanya bisa mengontrol magnitudo dan frekuensi (kecepatan sudut), tetapi juga mengontrol posisi sesaat, tegangan, arus dan fluks space vektor, sehingga metode pengontrolan ini bisa bekerja pada keadaan mantap (steady state) dan keadaan peralihan (transient). Dengan metode vektor kontrol ini, kinerja motor induksi dapat ditingkatkan seperti motor DC berpenguatan bebas. Metode vektor kontrol ini akan menghasilkan kontrol performansi tinggi pada motor induksi untuk torka, kecepatan dan posisi yang ingin dicapai. Selain itu vektor kontrol juga memungkinkan pengontrolan yang cepat untuk magnitude fluks rotor dan torka-arus yang dihasilkan. Selain itu keuntungan menggunakan vektor kontrol pada motor induksi adalah kemungkinan operasi motor pada kecepatan di atas kecepatan dasar (pada daerah pelemahan medan ).
Adapun tujuan penelitian ini, untuk melakukan studi performansi pengaturan motor induksi melalui vektor kontrol khususnya metode Indirect Field Oriented Control menggunakan Simulink/Matlab dengan menganalisa keluaran (output) yang dihasilkan oleh simulasi Indirect Field Oriented Control.
Terdapat beberapa metode yang dapat digunakan untuk vektor kontrol seperti Field Oriented Control, Feedback Linearization, Direct Torque Control dan
Passivity Based Control. Metode yang populer saat
ini adalah Field Oriented Control dengan metode Flux-Feedforward Vector Control (Indirect Field Oriented Control). Hal ini dikarenakan pada tipe Indirect Field Oriented Control, tidak dibutuhkan detektor fluks atau penghitung fluks. Evaluasi vektor kontrol pada motor induksi bisa dilakukan dengan
No. 31 Vol.1 Thn. XVI April 2009 ISSN: 0854-8471
TeknikA 72
dua cara. Pertama dilaboratorium dengan menggunakan mesin yang real dan menyediakan vector controller dan sebuah Current-Regulated Pulse Width Modulation (CRPWM) inverter. Keuntungan cara ini adalah faktor natural sudah termasuk dalam percobaan misalnya noise yang dihasilkan dan karakteristik sensor. Kekurangan cara ini adalah sulit untuk mengobservasi dan mengganti parameter elektrik mesin ketika sedang bekerja[3]. Selain itu ukuran, tipe, dan daya motor yang ada juga merupakan suatu batasan. Selain itu biaya yang mahal dan keterbatasan alat yang ada di laboratorium juga merupakan kendala untuk dilakukan pengujian dengan cara ini. Cara kedua adalah dengan simulasi menggunakan software komputer. Keunggulan cara ini adalah semua besaran dapat diobservasi dan parameter dapat diubah untuk mengamati efeknya dan memperbaiki kesalahan estimasi. Dengan cara ini kekurangan yang terdapat pada cara pertama dapat ditutupi, tetapi kelemahan cara ini adalah adanya pengabaian-pengabaian terhadap kondisi tertentu.
METODE
Metode yang digunakan dalam penelitian ini adalah:
o Memodelkan persamaan-persamaan motor
induksi dalam sumbu koordinat abc kemudian mentransformasikannya ke persamaan kerangka acuan bebas qd0 dan kerangka acuan stationer.
o Merancang blok diagram simulasi berdasarkan
persamaan-persamaan kerangka acuan stationer qd0 yang telah diturunkan dengan Simulink/Matlab.
o Merepresentasikan grafik karakteristik
pengaturan kecepatan motor induksi dengan Indirect Field Oriented Control yang dihasilkan oleh Simulink/Matlab dan membandingkannya dengan grafik yang dihasilkan oleh skalar control.
o Menganalisa performansi pengaturan kecepatan
motor induksi dengan Indirect Field Oriented Control.
Secara garis besar di dalam simulasi ini terdapat tiga komponen, yaitu input, proses dan output. Setiap blok tersusun dari beberapa sub blok. Tiap blok akan dijelaskan sebagai berikut :
a. Kecepatan Referensi
Pengaturan kecepatan motor induksi dilakukan dengan memberikan kecepatan referensi yang dapat dirubah-rubah sesuai dengan keinginan. Blok kecepatan referensi ditunjukkan Gambar 1. berikut :
Gambar 1 Blok Kecepatan Referensi
b. Kontroller Torka
Sinyal kesalahan yang merupakan selisih kecepatan referensi dan kecepatan aktual diumpankan ke kontroller untuk diproses. Kontroller digunakan untuk memperkecil nilai kesalahan yang terjadi sehingga kecepatan actual mendekati kecepatan referensi. Kontroller yang digunakan adalah proporsional integral (PI). Blok Kontroller Torka ditunjukkan Gambar 2 berikut :
Gambar 2 Blok Kontroller Torka
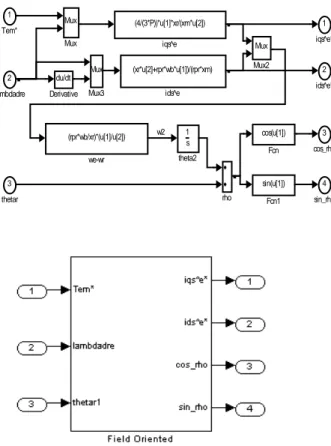
c. Field Oriented Control
Blok Field Oriented Control adalah blok dimana
terjadi peritungan
i
ds* ,i
*qs dan ߩ. Blok FieldOriented Control ditunjukkan Gambar 3.
Gambar 3 Blok Field Oriented Control
d. Transformasi qde ke abcs
Arus command yang dihasilkan oleh blok Field Oriented Control memakai kerangka acuan sinkron, sementara untuk blok inverter dibutuhkan arus command dalam kerangka acuan stasioner. Blok ini mengubah arus qd (kerangka acuan sinkron) ke arus
w2 4 sin_rho 3 cos_rho 2 ids^e* 1 iqs^e* (rpr*wb/xr)*(u[1]/u[2]) we-wr 1 s theta2 rho (4/(3*P))*u[1]*xr/(xm*u[2]) iqs^e (xr*u[2]+rpr*wb*u[1])/(rpr*xm) ids^e Mux Mux3 Mux Mux2 Mux Mux sin(u[1]) Fcn1 cos(u[1]) Fcn du/dt Derivative 3 thetar 2 lambdadre 1 Tem*
No. 31 Vol.1 Thn. XVI April 2009 ISSN: 0854-8471
TeknikA 73
abc (kerangka acuan stasioner). Blok transformasi qde ke abcs ditunjukkan oleh Gambar 4 berikut :
Gambar 4 Blok Transformasi qde ke abcs
e. Inverter
Blok inverter adalah penyedia tegangan input untuk motor induksi. Blok inverter ditunjukkan oleh Gambar 5 berikut :
Gambar 5 Blok Inverter
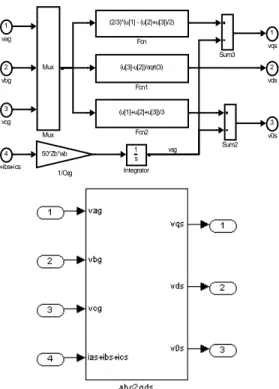
f. Transformasi abcs ke qd0s
Tegangan input untuk motor induksi dinyatakan dalam bentuk koordinat qd0s. Maka dibutuhkan blok tranformasi dari koordinat abcs menjadi koordinat qd0s. Blok tansformasi ke sumbu qd0s ditunjukkan oleh Gambar 6 berikut :
Gambar 6 Blok Transformasi abcs ke qd0s
g. Motor Induksi
Persamaan matematis motor induksi dimodelkan dalam sebuah blok yang ditunjukkan oleh Gambar 7 berikut :
Gambar 7 Blok Motor Induksi
h. Transformasi qd0s ke abc
Untuk mendapatkan hasil dalam koordinat abc, maka persamaan motor induksi dalam koordinat qd0s ditransformasikan kembali ke koordinat abcs. Blok transformasi ke sumbu abc ditunjukkan Gambar 8 berikut : 3 ics* 2 ibs* 1 ias* u[1]*u[3] + u[2]*u[4] iqs^s -u[1]*u[4] + u[2]*u[3]
ids^s -(u[1] -sqrt(3)*u[2])/2 ics -(u[1] + sqrt(3)*u[2])/2 ibs u[1] ias Mux Mux2 Mux Mux 4 sin_rho 3 cos_rho 2 ids^e* 1 iqs^e* 3 vcg 2 vbg 1 vag ic ib ia -K-Z3 -K-Z1 -K-Z 6 ics* 5 ics 4 ibs* 3 ibs 2 ias* 1 ias 3 vcg 2 vbg 1 vag ias ias* ibs ibs* ics ics* vag vbg vcg Inverter 6 ics* 5 ics 4 ibs* 3 ibs 2 ias* 1 ias vsg 3 v0s 2 vds 1 vqs Sum3 Sum2 Mux Mux 1 s Integrator (u[1]+u[2]+u[3])/3 Fcn2 (u[3]-u[2])/sqrt(3) Fcn1 (2/3)*(u[1] - (u[2]+u[3])/2) Fcn 50*Zb*wb 1/Csg 4 ias+ibs+ics 3 vcg 2 vbg 1 vag
No. 31
Teknik
Ga HASIL Dala induksi Control 1. Ke 2. Teg 3. Aru 4. Flu 5. Tor Dala digunak fasa, 4 50 HP, resistan 0.3020 reaktan 0.2280 induksi Hz ini perlaku dan ke hasil ya Gelomb G Gelo Control 3 i0s 2 ids 1 iqs1 Vol.1 Thn
kA
ambar 8 Blok L DAN PEMB am simulasi dengan met l yang diamati ecepatan aktual gangan stator t us stator terhad uks terhadap w rka elektromag am simulasi kan adalah mo kutub, 60 Hz d , tegangan 46 nsi stator 0.08 Ω, reaktan nsi bocor roto Ω, dan mome rotor sangkar akan dibebani uan dengan kec ecepatan refere ang diperoleh bang Untuk Ke Gambar 9 Kece ombang Outp l Untuk Kecep Mux Muxn. XVI Apri
Transformasi AHASAN pengaturan k toda Indirect adalah : l motor terhada terhadap waktu dap waktu waktu gnetik terhadap ini, motor otor induksi ro dengan parame 60 Volt, kecep 870 Ω, reakta nsi magnetisa or 0.3020 Ω, en inersia 1.66 r dengan freku oleh sebuah p cepatan referen ensi yang ber sebagai beriku ecepatan Refer epatan Referen put Indirect atan Referensi -(u[1]-sqrt(3)*u[2])/2 + u[3] Fcn2 -(u[1]+sqrt(3)*u[2])/2 +u[3] Fcn1 u[1] + u[3] Fcn
il 2009
qd0s ke abc kecepatan mo Field Orient ap waktu u p waktu induksi ya otor sangkar ti eter : daya mo patan 1705 rp ansi bocor sta asi 13.0800 reasistansi ro 620 N-m. Mo uensi nominal pompa dan dib nsi yang konst rvariasi. Adap ut : rensi Konstan nsi Konstan Field Orien i Konstan 3 ics 2 ibs 1 ias
otor ted ang iga otor pm, ator Ω, otor otor 60 beri tan pun ted G O O G C Ga O
Gambar 10 K Oriented Contr Gambar 11 T Oriented Contr Gambar 12 Aru Control Untuk mbar 13 Tork Oriented Contr
I
ecepatan Aktu rol Untuk Kece
Konstan
Tegangan Stato rol Untuk Kece
Konstan
us Stator Indire k Kecepatan Re
ka Elektromagn rol Untuk Kece
Konstan
SSN: 0854-8
ual Indirect Fie epatan Referen
or Indirect Fiel epatan Referen
ect Field Orien eferensi Konsta netik Indirect F epatan Referen
8471
74
eld nsi ld nsi nted an Field nsiNo. 31
Teknik
Gamb Ori Gam Con Ga Con Gelomb Ga1 Vol.1 Thn
kA
bar 14. Magnitu ented Control mbar 15 Fluk ntrol Untuk Ke mbar 16 Fluks ntrol Untuk Ke bang Untuk Ke ambar 17 Kecen. XVI Apri
udo Fluks Roto Untuk Kecepa Konstan ks qr Indirect F ecepatan Refer s dr Indirect F ecepatan Refer ecepatan Refer epatan Referen
il 2009
or Indirect Fie atan Referensi Field Oriented rensi Konstan Field Oriented rensi Konstan rensi Bervariasi nsi Bervariasi
eld i Gelo Untu G O O Ga C
ombang Outpu uk Kecepatan R Gambar 18 K Oriented Contr Gambar 19 T Oriented Contr ambar 20 Aru Control untuk K
I
ut Indirect Fiel Referensi Berv Kecepatan Aktu rol untuk Kece Bervariasi
Tegangan Stato rol untuk Kece Bervariasi us Stator Indire Kecepatan Ref
SSN: 0854-8
ld Oriented Co variasi
ual Indirect Fie epatan Referen
or Indirect Fiel epatan Referen
ect Field Orien ferensi Bervaria
8471
75
ontrol eld nsi ld nsi nted asiNo. 31
Teknik
Gamb Ori Gamb Ori Gam Con1 Vol.1 Thn
kA
bar 21 Torka E iented Control B bar 22 Magnitu iented Control B mbar 23 Fluksntrol untuk Kec
n. XVI Apri
Elektromagnetik untuk Kecepat Bervariasi
udo Fluks Roto untuk Kecepat Bervariasi s qr Indirect F cepatan Refere
il 2009
k Indirect Fie tan Referensi or Indirect Fie tan Referensi Field Oriented nsi Bervariasi
ld eld G C D berik Tab T Tab To P digu Simu berd tegan untu digu ini. swit telah Field a. R R Indir dapa refer
Gambar 24 Fl Control untuk K Dari hasil simu
kut :
bel 1 Hasil Sim Param ω referen ω aktua Va (V Va maks Torka Elektrom Torka Beb Ia (Am Ia mak(A Fluks Ro
bel 2 Hasil Sim Param ω referens ω aktual Va (V orka Elektroma Torka Beba Ia (Amp Fluks Rot Pada Indirect F unakan adalah t ulasi metoda dasarkan asum ngan tiga fasa. uk menentukan unakan sebaga Walaupun ching inverter h memberikan d Oriented Con Respon Keadaa Respon keada
rect Field Ori at dilihat d rensi yang kon
I
luks dr Indirec Kecepatan Ref ulasi, didapatka mulasi dengan K Konstan meter nsi (rpm) al (rpm) Volt) s (Volt) magnetik (N-m) ban (N-m) mpere) Ampere) otor (wb) mulasi dengan K Bervariasi meter si (rpm) (rpm) V) agnetik (N-m) an (N-m) mpere) tor (wb) Field Oriented torka referensi Indirect Field msi bahwa m Sebuah kontro n arus stator, k ai sumber tega pada simula r diabaikan, n gambaran tent ntrol. an Mantap (Ste aan mantap ( iented Control dengan memb nstan setelah pe
SSN: 0854-8
ct Field Orient ferensi Bervaria an data-data se Kecepatan Refe IFO 188.5 184.5 190.1 298.3 ) 189.1 -189. 85.8 95.8 259.3 Kecepatan Refe IFOC 94.25 93.04 48.62 48.21 -48.2 11.33 259.2 Control, input i dan fluks refe d Oriented Co motor disuplai
oller arus digu karena suatu in angan pada m asi ini komp
namun simula tang metode In eady State) steady state) l dan skalar k berikan kece engasutan 0.5 d
8471
76
ted asi ebagai erensi C 50 50 10 30 10 00 80 80 30 erensi C 5 4 2 1 1 3 0 t yang erensi. ontrol oleh unakan nverter metode ponen asi ini ndirect pada kontrol epatan detik.No. 31 Vol.1 Thn. XVI April 2009 ISSN: 0854-8471
TeknikA 77
Pada simulasi untuk keadaan mantap (steady state) motor diberi kecepatan referensi yang sama
dengan kecepatan mekanik dasar motor
߱
yaitu188.50 rad/s. Dari simulasi didapatkan kecepatan aktual 184.50 rad/s, torka elektromagnetik 189.10 N-m, dan fluks rotor 259.30 wb dengan torka beban sebesar -189.00 N-m.. Dari data yang diperoleh, terlihat bahwa torka elektromagnetik yang dihasilkan oleh metode Indirect Field Oriented Control sangat mendekati torka yang dibutuhkan oleh beban. Kecepatan yang dihasilkan oleh Indirect Field Oriented Control telah mendekati nilai kecepatan referensi.
Dari gambar gelombang output kecepatan aktual, torka dan fluks, terlihat bahwa respon keadaan mantap (steady state) untuk metode Indirect Field Oriented Control lebih mulus. Hal ini disebabkan oleh kontrol yang terpisah antara torka dan fluks sehingga torka dan fluks yang dihasilkan akan lebih optimal. Pengaruh kontroller arus terlihat pada arus stator yang relatif stabil sehingga tegangan input untuk motor induksi yang digunakan juga lebih stabil.
b. Respon Keadaan Peralihan (Transient)
Respon keadaan peralihan (transient) pada metode Indirect Field Oriented Control dapat dilihat dengan memberikan kecepatan referensi yang bervariasi. Pada simulasi kali ini kecepatan referensi yang digunakan adalah [0 wbm/2 wbm/2 wbm/2 -wbm/2 0] yang diberikan pada waktu [0 0.25 0.5 1.0 1.25 1.5].
Dari simulasi untuk Indirect Field Oriented Control didapatkan kecepatan aktual 94.25 rad/s, torka elektromagnetik 48.21 N-m, dan fluks rotor 259.20 wb dengan torka beban sebesar -48.21 Nm. Pada keadaan peralihan (transient) ini torka elektromagnetik yang dihasilkan Indirect Field Oriented Control juga optimum. Jika diperhatikan fluks rotor yang dihasilkan dan dibandingkan dengan keadaan mantap (steady state) didapatkan bahwa fluks yang dihasilkan oleh Indirect Field Oriented Control pada keadaan peralihan (transient) sangat mendekati besarnya fluks yang dihasilkan oleh Indirect Field Oriented Control pada keadaan mantap (steady state).
Dari gambar gelombang output terlihat bahwa metode Indirect Field Oriented Control responnya lebih cepat Sehingga kecepatan aktual, torka, dan fluks yang dihasilkan juga lebih mulus. Hal ini karena adanya pengontrolan posisi sesaat pada
metode Indirect Field Oriented Control.
Pengontrolan posisi ini akan memberikan efek
positif terhadap
i
ds* yang mengontrol fluks dani
qs*yang mengontrol torka.
SIMPULAN
Dari simulasi pengontrolan kecepatan motor induksi dengan Indirect Field Oriented Control ini dapat disimpulkan :
1. Pada simulasi motor induksi dengan metode pengaturan kecepatan Indirect Field Oriented Control keadaan mantap (steady state) dihasilkan kecepatan aktual 184.50 rad/s, torka elektromagnetik 189.10 N-m, dan fluks rotor 259.30 wb.
2. Pada simulasi motor induksi dengan metode pengaturan kecepatan Indirect Field Oriented Control keadaan peralihan (transient) kecepatan aktual 94.25 rad/s, torka elektromagnetik 48.21 N-m, dan fluks rotor 259.20 wb.
3. Metode Indirect Field Oriented Control baik digunakan untuk pengontrolan motor induksi karena responnya yang sangat bagus, sehingga menghasilkan torka dan fluks yang optimum. 4. Penggunaan simulasi sangat membantu
memahami perilaku motor induksi karena pada kenyataannya sistem motor induksi multivariabel, tidak linier dan bervariasi terhadap waktu.
DAFTAR RUJUKAN
[1] Chapman, Stephen J, 1991, Electric Machinery
Fundamentals 3rd edition. New York :
McGraw-Hill.
[2] Kazmierskowski, Marian P, R. Krishnan and Freede Blaajerg, 2002, Control In Power Electronics, Selected Problem. USA : Academic Press.
[3] Ogaswara, Satoshi, H. Akagi, and A. Nabae, 1988, The Generalized Theory of Indirect Vector Control for AC Machines. IEEE Transactions on Industry Applications, Vol 24 No 3 May/Juni 1988, 470-478.
[4] Sen, P.C, 1997, Principle of Electric Machines
and Power Electronics 2nd edition. USA : John
Wiley & Sons.
[5] Wade, S, M. W. Dunnigan, and B. W. Williams, 1997, Modeling and simulation of Induction Machine Vector Control with Rotor Resistance Identification. IEEE Transactions on Power Electronic, Vol 12 No 3 May 1997,495-506. [6] Y.S, Herawati, 2005, Mengendalikan Motor
Induksi Dengan Elektromagnetik secara Vektor. Seminar Nasional Teknik Ketenagalistrikan Semarang 24-25 November 2005 ,E-11—E-15