TUGAS AKHIR
PENERAPAN METODE GERAKAN SEMUT PADA ROBOT
BERKAKI PEMADAM API
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
ARIE WONGSO
NIM : 075114009
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
APPLICATION ANT GAIT ON THE FIRE EXTINGUISHER
LEGGED ROBOT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
ARIE WONGSO
NIM : 075114009
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Anda bisa sukses, sekalipun tak ada orang yang percaya anda
bisa. Tapi anda tak pernah akan sukses jika tidak percaya pada diri
sendiri.
Skripsi ini kupersembahkan untuk…
Papa dan Mama tercinta…
Lina, Mulyono, dan Sunita adekku tersayang
yang selalu memberikan dukungan dan support
untukku
…
Selyna wong tercinta yang memberikan
semangat, dukungan dan warna baru dalam
INTISARI
KRCI (Kontes Robot Cerdas Indonesia) menjadi sebuah wadah bagi seluruh
universitas di Indonesia untuk mengapresiasikan kreativitas, inovasi dan ilmu pengetahuan
di bidang robot. Robot berkaki 6 ini membantu mahasiswa dalam mengembangkan,
mempelajari, dan memberikan wawasan gerakan semut.
Robot ini dikendalikan dengan 2 mikrokontroler yaitu mikrokontroler
ATmega8535 dan Atmega128. Robot ini memiliki tombol yang dirancang untuk memilih
pola gerakan pada robot dan memiliki LCD yang menampilkan status dari sensor api.
Aktuator pada setiap kaki robot menggunakan motor servo dan dilengkapi sensor TPA81
sebagai pendeteksi keberadaan api. Robot juga dilengkapi dengan kipas untuk
memadamkan api.
Hasil dari Tugas akhir ini yaitu sebuah robot pemadam api berkaki 6 dengan
metode gerakan semut sudah berhasil dibuat. Gerak rotasi gerakan
tripod
lebih stabil
daripada gerakan
metachronal
. Gerakan
metachronal
lebih cepat 1,45 detik daripada
gerakan
tripod
. Robot sudah bisa menemukan api dan memadamkan api 100%.
ABSTRACT
KRCI (Indonesian Intelligent Robot Contest) becomes a container for all
universities in Indonesia to appreciate the creativity, innovation and knowledge of robotic.
Six legged robot help students to develop, learn, and give concept of ant movement.
This robot is controlled by two microcontroller which are the microcontroller
ATmega8535 and ATmega128. The robot has button that designed to select movement
patterns of the robot, and LCD to view status of fire sensor. Actuator
on each robot’s
legs
using servo motor and equipped with sensor TPA81 to detect position of fire. Robot is also
equipped with fan to extinguish the fire.
The results of this final research is a six legged robot fire extinguisher with ant gait
method has successfully created. Tripod movement is more stable than metachronal
movement on rotational motion. Metachronal movements 1.45 seconds faster than tripod
movement. Robot has found the fire and extinguish the fire 100%.
KATA PENGANTAR
Puji syukur dan terima kasih kepada Tuhan atas segala karunia-Nya sehingga tugas
akhir dengan judul
“Penerapan Metode Gerakan Semut Pada Robot Berkaki
Pemadam Api”
ini dapat diselesaikan dengan baik.
Penelitian yang berupa tugas akhir ini merupakan salah satu syarat bagi mahasiswa
Program Studi Teknik Elektro untuk memperoleh gelar Sarjana Teknik di Universitas
Sanata Dharma Yogyakarta. Penelitian ini dapat diselesaikan dengan baik atas bantuan,
gagasan dan dukungan dari berbagai pihak. Oleh karena itu, peneliti ingin mengucapkan
terima kasih kepada:
1.
Ibu Paulina Heruningsih Prima Rosa S.Si., M.Sc., selaku Dekan Fakultas Sains dan
Teknologi Universitas Sanata Dharma Yogyakarta.
2.
Ibu Wuri Harini S.T., M.T., selaku Dosen Pembimbing yang telah banyak
meluangkan waktu untuk memberikan bimbingan, pengetahuan, diskusi, arahan,
kritik dan saran kepada peneliti sehingga penulisan tugas akhir ini dapat
diselesaikan.
3.
Bapak dan Ibu Dosen yang telah memberikan semangat, pengetahuan dan
bimbingan kepada peneliti selama kuliah.
4.
Bapak dan Ibuku tercinta, Kakakku, Adikku, Pacarku, serta keluarga yang telah
memberikan semangat dan dukungan dalam penyelesaian tugas akhir ini.
5.
Teman-teman seperjuangan: Addy Heriadi Jauhari patner dalam pembuatan robot,
Christian Novianto S.T. yang sudah memberikan masukkan dan teman-teman
angkatan 2007 untuk kebersamaan dan dukungannya.
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH
UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ... 1
1.1
Latar Belakang ... 1
1.2
Tujuan dan Manfaat Penelitian ... 2
1.3
Batasan Masalah ... 2
1.4
Metodologi Penelitian... 2
BAB II DASAR TEORI ... 5
2.1
Mikrokontroler AVR ... 5
2.1.1
Susunan Kaki Mikrokontroler ATmega8535 ... 6
2.1.2
Blok Diagram dan Arsitektur ATmega8535 ... 7
2.1.3
Pewaktuan CPU ... 8
2.1.4
Pewaktu atau Pencacah 16
Bit ...
9
2.1.5
Timer/Counter Interrupt Mask Register (TIMSK) ...
10
2.1.6
Timer/Counter Interrupt Flag Register (TIFR) ...
10
2.2
Mikrokontroler ATmega128 ... 11
2.2.1
Susunan Kaki Mikrokontroler ATmega128 ... 12
2.3
Program Pendukung ... 13
2.4
TPA81
Thermopile Array ...
14
2.4.1
Field of View (FOV) ...
15
2.4.2
Connections ...
15
2.4.3
Register
... 16
2.5
Motor Servo ... 17
2.6
LCD ... 18
2.7
Semut ... 19
2.8
Konfigurasi Transistor
Feedback Pair ...
20
BAB III RANCANGAN PENELITIAN ... 22
3.1
Perancangan Perangkat Keras ... 23
3.1.1
Desain Mekanik Robot ... 23
3.1.2
Rangkaian Sensor TPA81 ... 24
3.1.3
Rangkaian LCD ... 25
3.1.4
Rangkaian
Driver
Kipas ... 25
3.1.5
Rangkaian
Current Booster
... 26
3.2
Perancangan Perangkat Lunak ... 29
3.2.1
Diagram Alir Utama ... 29
3.2.2
Diagram Alir Subrutin Maju
Tripod
... 30
3.2.3
Diagram Alir Subrutin Mundur
Tripod ...
31
3.2.4
Diagram Alir Subrutin Belok Kiri
Tripod ...
32
3.2.5
Diagram Alir Subrutin Belok Kanan
Tripod ...
33
3.2.6
Diagram Alir Subrutin Maju
Metachronal ...
34
3.2.7
Diagram Alir Subrutin Mundur
Metachronal ...
35
3.2.8
Diagram Alir Subrutin Belok Kiri
Metachronal ...
36
3.2.9
Diagram Alir Subrutin Belok Kanan
Metachronal ...
37
3.2.10
Diagram Alir Subrutin Netral ... 38
3.2.11
Diagram Alir Subrutin Api ... 39
BAB IV HASIL DAN PEMBAHASAN ... 40
4.1
Implementasi Alat... 40
4.2
Pengujian
Metachronal Gait
dan
Tripod Gait
... 44
4.3
Pengujian Waktu Maju, Mundur, Putar Kanan dan Putar Kiri ... 45
4.4
Pengujian Robot Saat Posisi Berputar ... 46
4.6
Pengujian Mekanik Robot ... 48
4.7
Pengujian Rangkaian Regulator Servo ... 48
4.8
Pengujian Rangkaian Regulator Sensor Api, LCD, dan Kipas ... 49
4.9
Perbandingan Antara Gerakan Metachronal dan Gerakan Tripod ... 50
4.10
Pembahasan Program pada Mikrokontroler ... 51
4.10.1
Pembahasan Program Untuk Sistem Sensor, Kipas dan LCD... 51
4.10.2
Pembahasan Program Servo ... 54
BAB V KESIMPULAN DAN SARAN... 72
5.1
Kesimpulan ... 72
5.2
Saran ... 72
DAFTAR PUSTAKA ... 73
LAMPIRAN ... 74
DAFTAR GAMBAR
Halaman
Gambar 1.1
Blok Model Perancangan ... 3
Gambar 2.1
Susunan kaki-kaki ATmega8535 ... 6
Gambar 2.2
Diagram Blok Mikrokontroler ATmega8535 ... 7
Gambar 2.3
Menggunakan Osilator Internal ... 8
Gambar 2.4
Menggunakan sumber detak eksternal ... 8
Gambar 2.5
Distribusi pewaktu ... 8
Gambar 2.6
Register
TCCR1B ... 9
Gambar 2.7
Register
TIMSK ... 10
Gambar 2.8
Register
TIFR ... 10
Gambar 2.9
Susunan kaki-kaki ATmega128 ... 12
Gambar 2.10
Worksheet
dan
toolbar
code vision
AVR
... 14
Gambar 2.11 TPA81
Thermopile array ...
14
Gambar 2.12 Sudut pandang TPA81 ... 15
Gambar 2.13 Konfigurasi pin TPA81 ... 16
Gambar 2.14 Motor servo ... 17
Gambar 2.15 Timing pulsa servo ... 18
Gambar 2.16 Semut ... 19
Gambar 2.17 Pola gerakan
metachronal
... 20
Gambar 2.18 Pola gerakan
tripod
... 20
Gambar 2.19 Konfigurasi
feedback pair
... 20
Gambar 3.1
Blok diagram perancangan sistem pada robot ... 22
Gambar 3.2
Tampak depan ... 23
Gambar 3.3
Tampak samping ... 23
Gambar 3.4
Tampak atas ... 24
Gambar 3.5
Tampak belakang ... 24
Gambar 3.6
Rangkaian tambahan sensor TPA81 ... 24
Gambar 3.7
Rangkaian LCD ... 25
Gambar 3.8
Rangkaian
driver
kipas ... 26
Gambar 3.10 Rangkaian feedback pair ... 27
Gambar 3.11 Diagram alir utama ... 29
Gambar 3.12 Diagram alir subrutin gerak maju
tripod gait
... 30
Gambar 3.13 Diagram alir subrutin gerak mundur
tripod gait
... 31
Gambar 3.14 Diagram alir subrutin belok kiri
tripod gait
... 32
Gambar 3.15 Diagram alir subrutin gerak belok kanan
tripod gait
... 33
Gambar 3.16 Diagram alir subrutin gerak maju
metachronal gait
... 34
Gambar 3.17 Diagram alir subrutin gerak mundur
metachronal gait
... 35
Gambar 3.18 Diagram alir subrutin gerak belok kiri
metachronal gait
... 36
Gambar 3.19 Diagram alir subrutin gerak belok kanan
metachronal gait
... 37
Gambar 3.20 Diagram alir subrutin netral ... 38
Gambar 3.21 Diagram alir subrutin api ... 39
Gambar 4.1
Tampak atas ... 40
Gambar 4.2
Tampak depan ... 41
Gambar 4.3
Tampak samping ... 41
Gambar 4.4
Tampak belakang ... 41
Gambar 4.5
Regulator sensor ... 42
Gambar 4.6
Regulator servo ... 42
Gambar 4.7
Modul LCD ... 42
Gambar 4.8
Modul ATmega128 ... 43
Gambar 4.9
Modul ATmega8535 ... 43
Gambar 4.10 Sensor TPA81 ... 43
Gambar 4.11
Metachronal gait
... 44
Gambar 4.12
Tripod gait
... 44
Gambar 4.13 Grafik perbandingan waktu pergerakan ... 46
DAFTAR TABEL
Halaman
Tabel 2.1
Prescaler timer/counter 1
... 9
Tabel 2.2
Register
TPA81 ... 16
Tabel 2.3
Command
dan
action
TPA81 ... 17
Tabel 2.4
Konfigurasi pin LCD ... 18
Tabel 4.1
Perbandingan waktu pergerakan ... 45
Tabel 4.2
Pengujian posisi ... 46
Tabel 4.3
Perbandingan waktu memadamkan api ... 47
Tabel 4.4
Pengukuran arus servo ... 49
Tabel 4.5
Pengukuran arus regulator sensor api, LCD, dan kipas ... 49
BAB I
PENDAHULUAN
1.1
Latar Belakang
KRCI (Kontes Robot Cerdas Indonesia) setiap tahun dengan tujuan untuk
menumbuh-kembangkan dan memperkaya khasanah ilmu pengetahuan dan teknologi serta
mengembangkan kreativitas dan inovasi mahasiswa. KRCI menjadi sebuah wadah bagi
seluruh universitas di Indonesia untuk mengapresiasikan kreativitas, inovasi dan ilmu
pengetahuan di bidang robot.
Berdasarkan hal di atas, penulis ingin membuat sebuah robot berkaki 6 yang
diharapkan mampu bersaing dalam KRCI serta bisa berguna bagi mahasiswa khususnya
mahasiswa Sanata Dharma untuk mempelajari dan mengembangkan robot berkaki ini
menjadi lebih kompetitif.
Robot berkaki 6 ini akan dibuat dengan meniru gerakan semut saat berjalan. Semut
merupakan salah satu hewan berkaki 6 dan sering dijumpai dimana-mana. Meskipun
ukuran tubuhnya relatif sangat kecil, semut adalah hewan terkuat kedua di dunia. Bila
dibandingkan dengan gajah yang hanya mampu menopang beban dengan berat 2 kali dari
berat badannya sendiri, semut jantan mampu menopang beban dengan berat 50 kali dari
berat badannya sendiri.
Robot berkaki 6 yang terinspirasi dari semut sudah pernah dibuat sebelumnya, yaitu
insect inspired actively compliant hexapod capable of object manipulation
[1] dan
insect
inspired actively compliant robotic hexapod
[2]. Konstruksi badan robot ini dibuat
menyerupai semut, dengan pola gerakan berjalan menyerupai
stick insect
(serangga dengan
bentuk badan seperti tongkat). Robot ini bisa menentukan beban total yang dibawa robot
secara otomatis.
1.2
Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah:
a.
Menghasilkan sebuah robot berkaki 6 yang berjalan meniru 2 gerakan semut yaitu
metachronal gait
dan
tripod gait
.
b.
Menghasilkan robot yang dapat melacak serta memadamkan api secara otomatis.
Manfaat dari penelitian ini adalah:
a.
Membantu mengembangkan robot berkaki 6 dan diharapkan mampu berkompetisi
di KRCI.
b.
Membantu mahasiswa khususnya mahasiswa Sanata Dharma untuk mempelajari
dan mengembangkan robot ini menjadi lebih kompetitif.
c.
Memberikan wawasan gerakan semut pada mahasiswa.
d.
Memberikan pemilihan gerakan yang efisien pada robot berkaki enam.
1.3
Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
a.
Menggunakan TPA81 sebagai sensor api.
b.
Menggunakan mikrokontroler ATMega 8535 dan ATMega 128.
c.
Menggunakan motor servo
Tower Pro
MG945.
d.
Setiap kaki menggunakan 3 buah motor servo.
e.
Menggunakan bahasa pemrograman C untuk mengendalikan motor servo dan
menjalankan sensor.
f.
Robot berjalan meniru 2 gerakan semut saat berjalan dengan tombol pemilihan.
g.
Memadamkan api dan mendeteksi api dengan menggunakan sensor TPA81.
h.
Menggunakan lilin sebagai sumber api.
1.4
Metodologi Penelitian
Penulisan skripsi ini menggunakan metode sebagai berikut :
a.
Pengumpulan bahan-bahan referensi berupa buku-buku, artikel dan jurnal-jurnal.
b.
Perancangan sistem
hardware
dan
software
. Tahap ini bertujuan untuk mencari dan
c.
Pembuatan sistem
hardware
dan
software
. Sistem akan bekerja apabila user
menekan tombol
start
pada robot. Setelah itu mikrokontroler 1 akan menjalankan
sensor api dan kipas, sedangkan mikrokontroler 2 akan menjalankan motor servo.
Robot berjalan meniru gerakan semut saat berjalan, kemudian robot mencari
sumber api dengan sensor api dan memadamkan api dengan kipas.
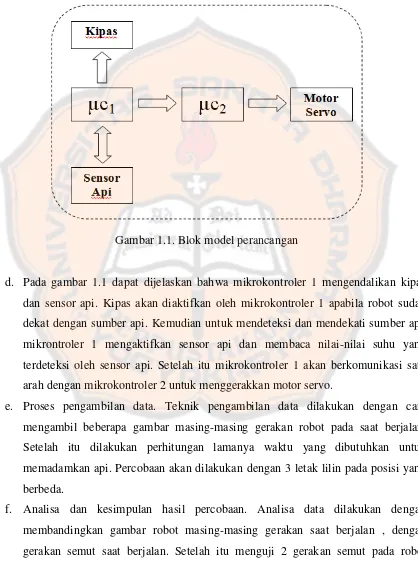
Gambar 1.1. Blok model perancangan
d.
Pada gambar 1.1 dapat dijelaskan bahwa mikrokontroler 1 mengendalikan kipas
dan sensor api. Kipas akan diaktifkan oleh mikrokontroler 1 apabila robot sudah
dekat dengan sumber api. Kemudian untuk mendeteksi dan mendekati sumber api,
mikrontroler 1 mengaktifkan sensor api dan membaca nilai-nilai suhu yang
terdeteksi oleh sensor api. Setelah itu mikrokontroler 1 akan berkomunikasi satu
arah dengan mikrokontroler 2 untuk menggerakkan motor servo.
e.
Proses pengambilan data. Teknik pengambilan data dilakukan dengan cara
mengambil beberapa gambar masing-masing gerakan robot pada saat berjalan.
Setelah itu dilakukan perhitungan lamanya waktu yang dibutuhkan untuk
memadamkan api. Percobaan akan dilakukan dengan 3 letak lilin pada posisi yang
berbeda.
BAB II
DASAR TEORI
2.1
Mikrokontroler AVR
Mikrokontroler adalah suatu kombinasi mikroprosesor, piranti I/O (
Input/Output
)
dan memori, yang terdiri atas ROM (
Read Only Memory
) dan RAM (
Random Access
Memory
), dalam bentuk keping tunggal (
single chip
). Mikrokontroler ATmega8535 adalah
mikrokontroler 8
bit
buatan ATMEL dengan 8
KByte System Programable Flash
dengan
teknologi memori (
nonvolatile
), kepadatan tinggi, dan kompatibel dengan pin
out
dan set
instruksi standar industri MCS51 INTEL. Arsitektur yang digunakan dengan RISC
(
Reduce Instruction set in singgle chip
). Mikrokontroler ATmega8535 memiliki
karakteristik sebagai berikut [3]:
1.
Kompatibel dengan produk keluarga MCS51.
2.
Dapat digunakannya bahasa C sebagai bahasa pemrogramannya.
3.
Programmable Flash Memory
sebesar 8 K Byte.
4.
Memiliki 512
Bytes
EEPROM yang dapat diprogram.
5.
Ketahanan (
endurance
) : 10.000 siklus tulis/hapus.
6.
Jangkauan operasi : 4,5 – 5,5 Volt.
7.
Fully Static Operation
: 0 Hz – 16 MHz untuk ATmega8535.
8.
Dua level
Program Memory Lock
yaitu
flash program
dan EEPROM
data security.
9.
RAM Internal 128 X 8
bit
.
10. Memiliki 32 jalur I/O yang dapat diprogram.
11. Satu pencacah 8
bit
dengan
separate prescaler
.
12. Satu pencacah16
bit
dengan
separate prescaler.
13. Sumber interupsi (
interrupt source
) eksternal dan internal.
14. Kanal pengirim-penerima tak serempak universal (UART-
UniversalAsynchronous
Receiver-Transmitter
) yang dapat diprogram.
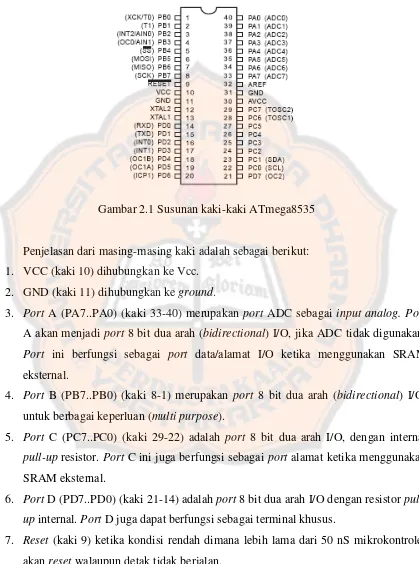
2.1.1 Susunan Kaki Mikrokontroler ATmega8535
[3]
Bentuk kemasan dan susunan kaki-kaki mikrokontroler dari ATmega8535
diperlihatkan seperti pada Gambar 2.1
Gambar 2.1 Susunan kaki-kaki ATmega8535
Penjelasan dari masing-masing kaki adalah sebagai berikut:
1.
VCC (kaki 10) dihubungkan ke Vcc.
2.
GND (kaki 11) dihubungkan ke
ground
.
3.
Port
A (PA7..PA0) (kaki 33-40) merupakan
port
ADC sebagai
input analog. Port
A akan menjadi
port
8 bit dua arah (
bidirectional
) I/O, jika ADC tidak digunakan.
Port
ini berfungsi sebagai
port
data/alamat I/O ketika menggunakan SRAM
eksternal.
4.
Port
B (PB7..PB0) (kaki 8-1) merupakan
port
8 bit dua arah (
bidirectional
) I/O,
untuk berbagai keperluan (
multi purpose
).
5.
Port
C (PC7..PC0) (kaki 29-22) adalah
port
8 bit dua arah I/O, dengan internal
pull-up
resistor.
Port
C ini juga berfungsi sebagai
port
alamat ketika menggunakan
SRAM eksternal.
6.
Port
D (PD7..PD0) (kaki 21-14) adalah
port
8 bit dua arah I/O dengan resistor
pull-up
internal.
Port
D juga dapat berfungsi sebagai terminal khusus.
8.
XTAL1 (kaki 13) masukan bagi penguat osilator terbalik dan masukan bagi
rangkaian operasi detak internal.
9.
XTAL2 (kaki 12) keluaran dari penguat osilator terbalik.
10. ICP (kaki 20) adalah masukan bagi masukan fungsi
Capture Timer/counter1
.
11. OC1B (kaki 18) adalah kaki keluaran bagi fungsi
Output CompareB
keluaran
Timer/Counter1
.
12. Aref adalah pin referensi analog untuk
A/D Converter (ADC)
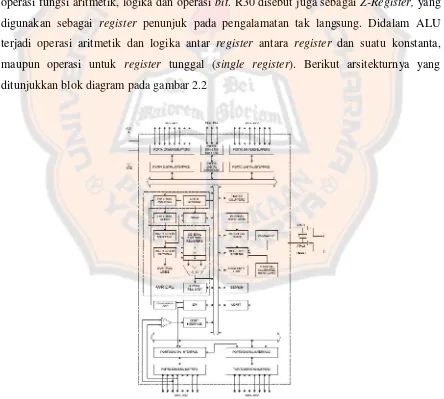
2.1.2 Blok Diagram dan Arsitektur ATmega8535
[3]
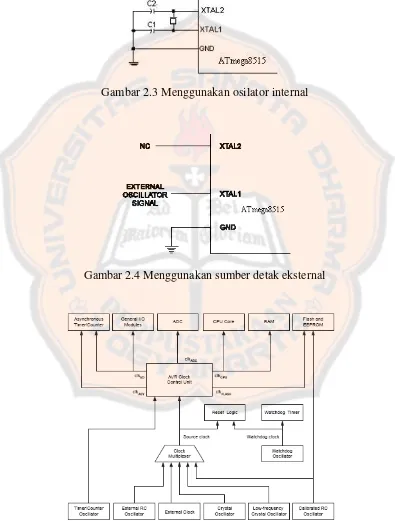
2.1.3 Pewaktuan CPU
[3]
Mikrokontroler ATmega8535 memiliki osilator internal (
on chip
osilator) yang
dapat digunakan sebagai sumber detak bagi CPU. Untuk menggunakan osilator internal
diperlukan sebuah kristal atau resonator keramik antara kaki Xtal1 dan kaki Xtal2 dan dua
buah kapasitor yang ditambahkan seperti terlihat pada Gambar 2.3.
Gambar 2.3 Menggunakan osilator internal
Gambar 2.4 Menggunakan sumber detak eksternal
2.1.4 Pewaktu atau Pencacah 16
Bit
[3]
Pencacah pada ATmega8535 diatur oleh
register
TCCR1B (
Timer/Counter1
Control Register B
).
Register
TCCR1B dijelaskan pada Gambar 2.6
Gambar 2.6
Register
TCCR1B
Penjelasan dari masing-masing bit adalah sebagai berikut:
Bit 7 ICNC1 (
Input Capture
1
Noise Canceler
(4 CKs). Bit ini berfungsi
meng-enable
/
disable
fungsi
noise canceler.
Bit 6 ICES1 (
Input Capture
1
Edge Select
). Bit ini berfungsi memilih jenis tepian
untuk memicu ICP.
Bit 4:3 WGM13:2 (
Waveform Generation Mode
). Bit ini berfungsi mengaktifkan
fungsi
Waveform Generation.
Bit 2:0 CS12, CS11, CS10:
Clock Select
1, Bits 2, 1 dan 0
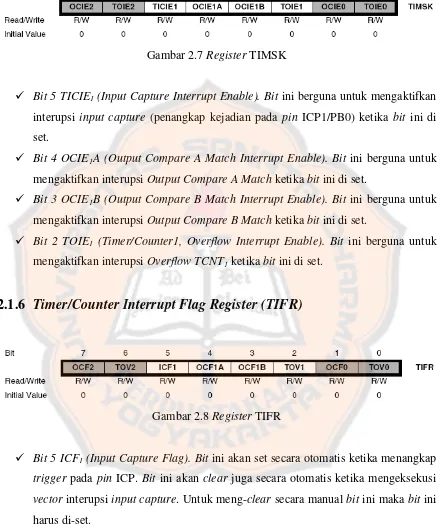
2.1.5
Timer/Counter Interrupt Mask Register (TIMSK)
Gambar 2.7
Register
TIMSK
Bit 5 TICIE
1(Input Capture Interrupt Enable).
Bit
ini berguna untuk mengaktifkan
interupsi
input capture
(penangkap kejadian pada
pin
ICP1/PB0) ketika
bit
ini di
set.
Bit 4 OCIE
1A (Output Compare A Match Interrupt Enable).
Bit
ini berguna untuk
mengaktifkan interupsi
Output Compare A Match
ketika
bit
ini di set.
Bit 3 OCIE
1B (Output Compare B Match Interrupt Enable).
Bit
ini berguna untuk
mengaktifkan interupsi
Output Compare B Match
ketika
bit
ini di set.
Bit 2 TOIE
1(Timer/Counter1, Overflow Interrupt Enable).
Bit
ini berguna untuk
mengaktifkan interupsi
Overflow TCNT
1ketika
bit
ini di set.
2.1.6
Timer/Counter Interrupt Flag Register (TIFR)
Gambar 2.8
Register
TIFR
Bit 5 ICF
1(Input Capture Flag).
Bit
ini akan set secara otomatis ketika menangkap
trigger
pada
pin
ICP.
Bit
ini akan
clear
juga secara otomatis ketika mengeksekusi
vector
interupsi
input capture
. Untuk meng-
clear
secara manual
bit
ini maka
bit
ini
harus di-set.
Bit 4 OCF
1A (Output Compare A Match Flag).
Bit
ini akan set secara otomatis
ketika terjadi
compare match A
.
Bit
ini akan
clear
juga secara otomatis ketika
mengeksekusi
vector
interupsi
output compare A
. Untuk meng-
clear
secara manual
Bit 4 OCF
1B (Output Compare B Match Flag).
Bit
ini akan set secara otomatis
ketika terjadi
compare match B
.
Bit
ini akan
clear
juga secara otomatis ketika
mengeksekusi
vector
interupsi
output compare B
. Untuk meng-
clear
secara manual
bit
ini maka
bit
ini harus di-set.
Bit 2 TOV
1(Timer/Counter1, Overflow Flag).
Bit
ini akan set secara otomatis
ketika terjadi
overflow
pada
register
pencacah TCNT1.
Bit
ini akan
clear
juga
secara otomatis ketika mengeksekusi
vector
interupsi
overflow timer/counter1
.
Untuk meng-
clear
secara manual
bit
ini maka
bit
ini harus di-set.
2.2
Mikrokontroler ATmega128
[4]
Mikrokontroler ATmega128 adalah mikrokontroler 8
bit
buatan ATMEL dengan
128
KByte System Programable Flash
dengan teknologi memori (
nonvolatile
), kepadatan
tinggi, dan kompatibel dengan pin
out
dan set instruksi standar industri MCS51 INTEL.
Arsitektur yang digunakan dengan RISC (
Reduce Instruction set in singgle chip
).
Mikrokontroler ATmega128 memiliki karakteristik sebagai berikut [3]:
1.
Kompatibel dengan produk keluarga MCS51.
2.
Dapat digunakannya bahasa C sebagai bahasa pemrogramannya.
3.
Programmable Flash Memory
sebesar 128 K
Bytes.
4.
Memiliki 4 K
Bytes
EEPROM yang dapat diprogram.
5.
Ketahanan (
endurance
) : 10.000 siklus tulis/hapus.
6.
Jangkauan operasi : 4,5 – 5,5 Volt.
7.
Fully Static Operation
: 0 Hz – 16 MHz untuk ATmega128.
8.
Dua level
Program Memory Lock
yaitu
flash program
dan EEPROM
data security.
9.
RAM Internal 128 X 8
bit
.
10. Memiliki 48 jalur I/O yang dapat diprogram.
11. Dua pencacah 8
bit
dengan
separate prescaler
.
12. Dua tambahan pencacah16
bit
dengan
separate prescaler.
13. Sumber interupsi (
interrupt source
) eksternal dan internal.
14. Kanal pengirim-penerima tak serempak universal (UART-
UniversalAsynchronous
Receiver-Transmitter
) yang dapat diprogram.
15.
Low-power Idle
dan
Power-down Model.
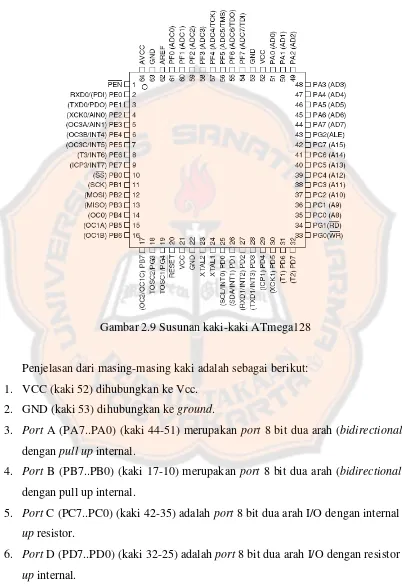
2.2.1 Susunan Kaki Mikrokontroler ATmega128
Bentuk kemasan dan susunan kaki mikrokontroler dari ATmega128 diperlihatkan
seperti pada gambar 2.9
Gambar 2.9 Susunan kaki-kaki ATmega128
Penjelasan dari masing-masing kaki adalah sebagai berikut:
1.
VCC (kaki 52) dihubungkan ke Vcc.
2.
GND (kaki 53) dihubungkan ke
ground
.
3.
Port
A (PA7..PA0) (kaki 44-51) merupakan
port
8 bit dua arah (
bidirectional
) I/O
dengan
pull up
internal.
4.
Port
B (PB7..PB0) (kaki 17-10) merupakan
port
8 bit dua arah (
bidirectional
) I/O
dengan pull up internal.
5.
Port
C (PC7..PC0) (kaki 42-35) adalah
port
8 bit dua arah I/O dengan internal
pull-up
resistor.
7.
Port
E (PD7..PD0) (kaki 32-25) adalah
port
8 bit dua arah I/O dengan resistor
pull-up
internal.
8.
Port
F (PD7..PD0) (kaki 9-2) adalah
port
yang difungsikan sebagai masukkan
analog ADC.
Port
F akan berfungsi sebagai
port
8 bit dua arah I/O, jika tidak
difungsikan sebagai masukkan analog
A/D Converter (ADC)
.
9.
Port
G (PD4..PD0) (kaki 19-18,34-33) adalah
port
8 bit dua arah I/O dengan
resistor
pull-up
internal.
10.
Reset
(kaki 9) ketika kondisi rendah dimana lebih lama dari 50 nS mikrokontroler
akan
reset
walaupun detak tidak berjalan.
11. XTAL1 (kaki 13) masukan bagi penguat osilator terbalik dan masukan bagi
rangkaian operasi detak internal.
12. XTAL2 (kaki 12) keluaran dari penguat osilator terbalik.
13. AVCC adalah pin penyuplai tegangan untuk
port
F dan
A/D Converter (ADC).
14. Aref adalah pin referensi analog untuk
A/D Converter (ADC).
Register TCCR1B,
Timer/Counter Interrupt Mask Register (TIMSK), dan
Timer/Counter Interrupt Flag Register (TIFR)
untuk ATmega128 sama dengan register
ATmega8535.
2.3
Program Pendukung
Pada pembuatan program mikrokontroler, dibutuhkan sebuah
software
untuk
menulis dan menempatkan program.
Software
pendukung yang digunakan pada modul ini
adalah
codevision AVR
versi
1.25.8
profesional
.
2.3.1
CodeVision AVR 1.25.8 Profesional
CodeVision AVR merupakan salah satu
software
kompiler yang khusus digunakan
untuk mikrokontroler keluarga AVR. Menurut pendapat penulis dari beberapa
software
compiler C yang pernah digunakan, CodeVision AVR merupakan yang terbaik bila
dibandingkan dengan kompiler-kompiler yang lain.
CodeVision AVR memiliki beberapa kelebihan antara lain [5]:
1.
Menggunakan
Integrated Development Environment
(IDE).
3.
Memiliki fasilitas
CodeWizard AVR
yang berfungsi untuk membangkitkan kode
program secara otomatis.
4.
Memiliki fasilitas
debugger
sehingga dapat menggunakan
software
kompiler lain
untuk mengecek kode
assembler
, contoh
AVR studio
.
5.
Memiliki terminal komunikasi serial yang terintegrasi dalam
CodeVision AVR
sehingga dapat digunakan untuk membantu pengecekan program yang telah dibuat
khususnya yang menggunakan fasilitas komunikasi serial UART.
Code vision AVR
menyediakan area kerja dan
toolbar
yang mudah untuk
melakukan berbagai operasi.
Code vision AVR
memiliki beberapa menu aplikasi
windows
yaitu meliputi
File, Project, Edit, Debug, View, Tool, Windows, Help, check syntak error
compile dan make.
Gambar 2.10
Worksheet
dan
toolbar
code vision
AVR
2.4 TPA81
Thermopile Array
[6]
TPA81 dapat mendeteksi sinar infra m
erah dengan panjang gelombang 2μm
-
22μ
m
(1
μm
= sepersejuta meter). Panjang gelombang ini dihasilkan oleh benda-benda yang panas
dapat dideteksi oleh TPA81. TPA81 dapat mengukur suhu tanpa harus menyentuh sumber
panas, karena TPA81 dapat mendeteksi radiasi panas. Sebagai gambaran, TPA81 dapat
mendeteksi suhu api lilin dalam jarak 2 meter tanpa terpengaruh cahaya ruangan.
2.4.1
Field of View (FOV)
TPA81 dapat mendeteksi suhu pada 8 titik sekaligus, karena di dalam TPA81
terdapat 8 buah sensor
thermopile
yang masing-masing memiliki sudut pandang (
Field of
View
) 5,12
oterhadap sumbu horizontal dan 6
oterhadap sumbu vertikal. Jadi total sudut
pandangnya adalah 41
odengan 6
o.
Gambar 2.12 Sudut pandang TPA81
2.4.2
Connections
Gambar 2.13 Konfigurasi pin TPA81
2.4.3
Register
TPA81 memiliki 10
register
yang dapat dibaca dan ditulis, yaitu:
Tabel 2.2
Register
TPA81
Pada TPA81, hanya
register
0 dan 1 yang dapat ditulisi.
Register
0 adalah
command register
yang digunakan untuk mengatur posisi servo dan mengubah
address
TPA81.
Register
ini tidak bisa dibaca. Membaca
register
0 akan menghasilkan pembacaan
Tabel 2.3
Command
dan
Action
TPA81
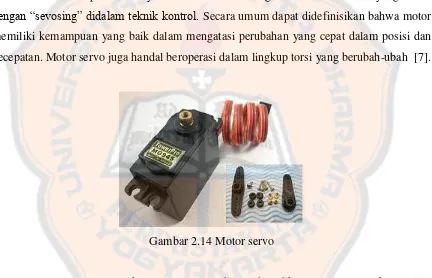
2.5
Motor Servo
Motor servo pada dasarnya adalah motor DC dengan kualifikasi khusus yang sesuai
dengan “sevosing” didalam teknik kontrol.
Secara umum dapat didefinisikan bahwa motor
memiliki kemampuan yang baik dalam mengatasi perubahan yang cepat dalam posisi dan
kecepatan. Motor servo juga handal beroperasi dalam lingkup torsi yang berubah-ubah
[7].
Gambar 2.14 Motor servo
Gambar 2.15 Timing pulsa servo
2.6
LCD
[8]
LCD adalah alat display yang dapat menampilkan karakter dua baris, dengan tiap
baris 16 karakter. LCD memiliki dua jenis layar, yaitu hijau dan biru. Layar hijau kontras
dan tampilan karakter satu warna (hitam s.d. abu). Sedangkan layar biru kontras
abu-abu dan tampilan karakter putih. LCD memiliki 16 pin, fungsi dan konfigurasi pin
ditunjukkan pada tabel 2.4.
2.7
Semut
Semut
adalah serangga eusosial yang berasal dari keluarga
formicidae
, semut
termasuk dalam ordo
hymenoptera
bersama dengan lebah dan tawon. Semut terbagi atas
lebih dari 12.000 kelompok, dengan perbandingan jumlah yang besar di kawasan
tropis.
Semut dikenal dengan koloni dan sarang-sarangnya yang teratur, yang terkadang terdiri
dari ribuan semut per koloni. Tubuh semut seperti serangga lainnya, memiliki
eksoskeleton
atau kerangka luar yang memberikan perlindungan dan juga sebagai tempat menempelnya
otot, berbeda dengan kerangka manusia dan hewan bertulang belakang. Pada bagian dada
semut terdapat tiga pasang kaki dan di ujung setiap kakinya terdapat semacam cakar kecil
yang membantunya memanjat dan berpijak pada permukaan [9].
Gambar 2.16 Semut
Gambar 2.17 Pola gerakan
metachronal
Gambar 2.18 Pola gerakan
tripod
2.8
Konfigurasi Transistor
Feedback Pair
[11]
Disebut juga pasangan senyawa / Sziklai, karena Konfigurasi ini ditemukan oleh
George Sziklai dari Hungaria. Konfigurasi Sziklai adalah konfigurasi dari dua transistor
bipolar polaritas berlawanan, jadi selalu akan terdiri dari satu NPN dan satu transistor PNP.
BAB III
RANCANGAN PENELITIAN
Perancangan sistem penerapan metode gerakan semut pada robot pemadam api
dibagi dalam dua bagian besar yaitu:
1.
Perancangan perangkat keras seperti yang ditunjukkan pada gambar 3.1 yang terdiri
dari: mikrokontroler ATmega128 dan sistem pendukung, mikrokontroler
ATmega8535 dan sistem pendukung, kipas DC, sensor
pin
g, sensor TPA81, motor
servo, dan kerangka robot.
2.
Perancangan perangkat lunak terdiri dari: program utama, subrutin gerakan semut,
subrutin sensor
pin
g, subrutin sensor TPA81, dan LCD.
Gambar 3.1. Blok diagram perancangan sistem pada robot
Cara kerja dari blok diagram yang ditunjukkan oleh gambar 3.1 adalah sebagai
berikut:
1.
Kipas DC diaktifkan oleh mikrokontroler ATmega8535 apabila jarak robot sudah
dekat dengan api.
2.
LCD 2x16 digunakan untuk mengetahui status dari sensor api. LCD ini akan
diaktifkan dengan mode
nibble
oleh mikrokontroler ATmega8535.
4.
Mikrokontroler ATmega8535 berkomunikasi satu arah dengan mikrokontroler
ATmega128 untuk menggerakan motor servo.
3.1
Perancangan Perangkat Keras
3.1.1 Desain Mekanik Robot
Pada perancangan kerangka robot, bahan yang digunakan adalah
acrylic
dan
dimensi robot yang akan didesain adalah 36cm x 30cm x 26cm. Gambar desain kerangka
robot ditunjukkan pada gambar di bawah ini:
Gambar 3.2 Tampak depan
Gambar 3.4 Tampak atas
Gambar 3.5 Tampak belakang
3.1.2 Rangkaian Sensor TPA81
Pada perancangan sensor TPA81 hanya menambahkan resistor
pull-up
sebesar 1K8
pada jalur
SDA
dan
SCL
, agar sinyal pada jalur
SDA
dan
SCL
stabil. Rangkaian ini
diperoleh dari dasar teori tentang TPA81. Rangkaian
pull up
sensor TPA81 ditunjukkan
pada gambar 3.6.
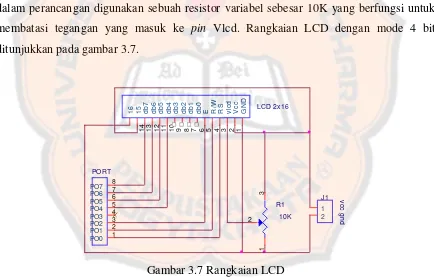
3.1.3 Rangkaian LCD
LCD yang digunakan adalah LCD 16x2 yang memiliki tipe LMB162A. LCD 16x2
bertipe ini memungkinkan pemrogram untuk mengoperasikan komunikasi data secara 8 bit
atau 4 bit. Jika menggunakan jalur data 4 bit akan ada 7 jalur data (3 untuk jalur kontrol
dan 4 untuk jalur data). Jika menggunakan jalur data 8 bit maka akan ada 11 jalur data (3
untuk jalur kontrol dan 8 untuk jalur data). Tiga jalur kontrol ke LCD ini adalah EN
(
Enable
), RS (
Register Select
) dan R/W (
Read
/
Write
).
Interface LCD merupakan sebuah
parallel bus
, hal ini sangat memudahkan dan
sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang
ditampilkan sepanjang 8 bit dikirim ke LCD secara 4 atau 8 bit pada satu waktu. Jika mode
4 bit yang digunakan, maka 2
nibble
data dikirim untuk membuat sepenuhnya 8 bit
(pertama dikirim 4 bit MSB lalu 4 bit LSB dengan pulsa
clock
EN setiap
nibble
nya).
Berdasarkan datasheet tegangan kontras (Vlcd) maksimum sebesar 5V sehingga
dalam perancangan digunakan sebuah resistor variabel sebesar 10K yang berfungsi untuk
membatasi tegangan yang masuk ke
pin
Vlcd. Rangkaian LCD dengan mode 4 bit
ditunjukkan pada gambar 3.7.
Gambar 3.7 Rangkaian LCD
3.1.4 Rangkaian
Drive
r Kipas
Gambar 3.8 Rangkaian
drive
r kipas
Pada rangkaian ini arus I
bmax = 20 mA. Agar arus keluaran sebesar 500 mA, maka
besarnya resistor R1 adalah:
Besar nilai resistor yang diperoleh adalah sebesar 300,7
Ω, dengan asumsi nilai β
transistor adalah 35. Setengah dari nilai β maksimum transistor.
3.1.5 Rangkaian
Current booster
Rangkaian ini berfungsi untuk mensuplai LCD, sensor TPA81, motor servo dan
kipas. Pada rangkaian ini digunakan transistor TIP2955 sebagai penguat arus dan regulator
LM7805 sebagai penurun tegangan menjadi 5V. Suplai tegangan untuk motor servo adalah
sebesar 6V, maka digunakan regulator LM7806 untuk menurunkan tegangan menjadi 6V.
Rangkaian
current booster
ditunjukkan pada gambar 3.9.
Q1
TIP3055
port uc
R1
RESISTOR
Gambar 3.9 Rangkaian
current booster
Pada rangkaian
current booster
yang digunakan untuk men
drive
motor servo.
Transistor Q2 digantikan dengan konfigurasi
feedback pair
. Transistor yang digunakan
pada
feedback pair
adalah TIP32 dan TIP3055. Rangkaian
feedback pair
ditunjukkan pada
gambar 3.10.
Gambar 3.10 Rangkaian
feedback pair
Arus yang masuk ke regulator adalah sebesar:
Disipasi daya pada transistor Q1 adalah sebesar:
Disipasi daya pada transistor Q2 adalah sebesar:
Nilai resistor R2 adalah sebesar:
Rangkaian yang digunakan untuk men
drive
sensor TPA81, kipas, dan LCD adalah
rangkaian
current booster
tanpa
feedback pair
. Arus regulator LM7805 dibatasi sebesar
100 mA dan arus keluaran yang harus di
drive
adalah 1 A. Berikut perhitungannya :
Arus yang masuk ke regulator adalah sebesar:
Pada perancangan ini akan digunakan dua buah rangkaian
current booster,
yaitu
current booster
dan
current booster
dengan konfigurasi
feedback pair
.
3.2
Perancangan Perangkat Lunak
3.2.1 Diagram Alir Utama
Start
Reg > 30 ?
Reg 5 & 6 ? Reg > Reg 6 ? Reg < Reg 5
Reg 5&6 > 100?
Nyalakan Kipas
Stop Reg = Pixel suhu
Subrutin Netral Subrutin
Api
Subrutin maju
Subrutin Belok kanan
Subrutin Belok
kiri Subrutin
maju
Subrutin maju
Subrutin Netral
Gambar 3.11 Diagram alir utama
apakah nilai suhu dari 8 channel sudah melebihi 30. selanjutnya jika iya, maka mengecek
channel mana yang mempunyai nilai suhu lebih dari 30. Jika tidak, maka memanggil
subrutin maju dan memanggil subrutin api lagi. Apabila nilai suhu sudah melebihi 100,
maka memanggil subrutin netral dan menyalakan kipas. Lebih jelasnya ditunjukkan pada
gambar 3.11.
3.2.2 Diagram Alir Subrutin Maju
Tripod
start
Diagram alir subrutin gerak maju
tripod gait
ditunjukkan pada gambar 3.12.
Subrutin ini untuk melakukan gerakan semut saat berjalan maju dengan metode
tripod gait
.
Gerakan ini menggunakan 3 kaki sebagai tumpuan dan 3 kaki bergerak bersamaan. Kaki 1
kiri, kaki 3 kiri dan kaki 2 kanan diangkat bersamaan dan bergerak maju. Tiga kaki yang
lain menjadi tumpuan. Pada gerakan berikutnya tiga kaki yang bergerak maju menjadi
tumpuan dan saling bergantian. Lebih jelasnya ditunjukkan pada gambar 3.12.
3.2.3 Diagram Alir Subrutin Mundur
Tripod
Diagram alir subrutin gerak mundur
tripod gait
ditunjukkan pada gambar 3.13.
Subrutin ini untuk melakukan gerakan semut saat berjalan mundur dengan metode
tripod
gait
. Gerakan ini menggunakan 3 kaki sebagai tumpuan dan 3 kaki bergerak bersamaan.
Pada gerakan mundur, posisi 3 kaki yang diangkat bergerak mundur. Pada gerakan
berikutnya kaki yang bergerak mundur menjadi tumpuan. Lebih jelasnya ditunjukkan pada
gambar 3.13.
3.2.4 Diagram Alir Subrutin Belok Kiri
Tripod
start
Diagram alir subrutin belok kiri
tripod gait
ditunjukkan pada gambar 3.14. Subrutin
ini untuk melakukan gerakan semut saat memutar posisi badan ke kiri dengan metode
tripod gait
. Gerakan ini menggunakan 3 kaki sebagai tumpuan dan 3 kaki bergerak
bersamaan. Pada gerakan belok kiri, posisi kaki 2 kiri mundur, kaki 1 dan kaki 3 kanan
pada posisi maju. Kemudian pergerakan berikutnya 3 kaki yang menjadi tumpuan diangkat
dan secara bersamaan posisi kaki 2 kiri, kaki 1 dan kaki 3 kanan bergerak kembali ke
posisi netral. Untuk lebih jelasnya ditunjukkan pada gambar 3.14.
3.2.5 Diagram Alir Subrutin Belok Kanan
Tripod
Diagram alir subrutin belok kanan
tripod gait
ditunjukkan pada gambar 3.15.
Subrutin ini untuk melakukan gerakan semut saat memutar posisi badan ke kanan dengan
metode
tripod gait
. Gerakan ini menggunakan 3 kaki sebagai tumpuan dan 3 kaki bergerak
bersamaan. Pada gerakan belok kanan, posisi kaki 2 kiri maju, kaki 1 dan kaki 3 kanan
pada posisi mundur. Kemudian pergerakan berikutnya 3 kaki yang menjadi tumpuan
diangkat dan secara bersamaan posisi kaki 2 kiri, kaki 1 dan kaki 3 kanan bergerak kembali
ke posisi netral. Untuk lebih jelasnya ditunjukkan pada gambar 3.15.
3.2.6 Diagram Alir Subrutin Maju
Metachronal
start
Diagram alir subrutin gerak maju
metachronal gait
ditunjukkan pada gambar 3.16.
Subrutin ini untuk melakukan gerakan semut saat berjalan maju dengan metode
metachronal gait
. Gerakan ini menggunakan 4 kaki sebagai tumpuan dan 2 kaki bergerak
bersamaan. Pada gerakan maju kaki 1 kiri dan kaki 3 kanan bergerak ke posisi maju.
Berikutnya kaki 2 kiri dan kaki 1 kanan bergerak ke posisi maju. Dalam waktu yang
bersamaan posisi kaki 1 kiri dan kaki 3 kanan kembali ke posisi netral. Kemudian kaki 3
kiri dan kaki 2 kanan bergerak ke posisi maju. Dalam waktu yang bersamaan posisi kaki 2
kiri dan kaki 1 kanan kembali ke posisi netral, sedangkan posisi kaki 1 kiri dan kaki 3
kanan ke posisi mundur. Untuk lebih jelasnya ditunjukkan pada gambar 3.16.
3.2.7 Diagram Alir Subrutin Mundur
Metachronal
Diagram alir subrutin gerak maju
metachronal gait
ditunjukkan pada gambar 3.17.
Subrutin ini untuk melakukan gerakan semut saat berjalan mundur dengan metode
metachronal gait
. Gerakan ini menggunakan 4 kaki sebagai tumpuan dan 2 kaki bergerak
bersamaan. Pada gerakan mundur kaki 1 kiri dan kaki 3 kanan bergerak ke posisi mundur.
Berikutnya kaki 2 kiri dan kaki 1 kanan bergerak ke posisi mundur. Dalam waktu yang
bersamaan posisi kaki 1 kiri dan kaki 3 kanan kembali ke posisi netral. Kemudian kaki 3
kiri dan kaki 2 kanan bergerak ke posisi mundur. Dalam waktu yang bersamaan posisi kaki
2 kiri dan kaki 1 kanan kembali ke posisi netral, sedangkan posisi kaki 1 kiri dan kaki 3
kanan ke posisi maju. Untuk lebih jelasnya ditunjukkan pada gambar 3.17.
3.2.8 Diagram Alir Subrutin Belok Kiri
Metachronal
start
Diagram alir subrutin belok kiri
metachronal gait
ditunjukkan pada gambar 3.18.
Subrutin ini untuk melakukan gerakan semut saat memutar posisi badan ke kiri dengan
metode
metachronal gait
. Gerakan ini menggunakan 4 kaki sebagai tumpuan dan 2 kaki
bergerak bersamaan. Pada gerakan belok kiri kaki 1 kiri mundur dan kaki 2 kanan maju.
Berikutnya kaki 2 kiri mundur dan kaki 1 kanan maju. Dalam waktu bersamaan kaki 1 kiri
dan kaki 2 kanan ke posisi netral. Kemudian kaki 3 kiri mundur dan kaki 3 kanan maju.
Dalam waktu yang bersamaan posisi kaki 2 kiri dan kaki 1 kanan ke posisi netral,
sedangkan posisi kaki 1 kiri maju dan kaki 2 kanan mundur. Untuk lebih jelasnya
ditunjukkan pada gambar 3.18.
3.2.9 Diagram Alir Subrutin Belok Kanan
Metachronal
Diagram alir subrutin belok kanan
metachronal gait
ditunjukkan pada gambar 3.19.
Subrutin ini untuk melakukan gerakan semut saat memutar posisi badan ke kanan dengan
metode
metachronal gait
. Gerakan ini menggunakan 4 kaki sebagai tumpuan dan 2 kaki
bergerak bersamaan. Pada gerakan belok kiri kaki 1 kiri maju dan kaki 2 kanan mundur.
Berikutnya kaki 2 kiri maju dan kaki 1 kanan mundur. Dalam waktu bersamaan kaki 1 kiri
dan kaki 2 kanan ke posisi netral. Kemudian kaki 3 kiri maju dan kaki 3 kanan mundur.
Dalam waktu yang bersamaan posisi kaki 2 kiri dan kaki 1 kanan ke posisi netral,
sedangkan posisi kaki 1 kiri mundur dan kaki 2 kanan maju. Untuk lebih jelasnya
ditunjukkan pada gambar 3.19.
3.2.10 Diagram Alir Subrutin Netral
Start
Port A = sevo Port C = servo Port D = servo Netral = sudut servo 0 derajat
Kaki 1 kiri netral Kaki 2 kiri netral Kaki 3 kiri netral Kaki 1 kanan netral Kaki 2 kanan netral Kaki 3 kanan netral
return
Gambar 3.20 Diagram subrutin netral
3.2.11 Diagram Alir Subrutin Api
Portb.0 = SDA Portb.1 = SCL X[8] = data register 2-9
Reg = 0x02 I = 0
Delay 40 ms Start I2C I2C write (0xD0)
I2C write (Reg) I2C write (0xD1) Data = I2C read (0)
I2C stop
I = 8? X[i] = Data
i=i+1 Reg=Reg+1
Stop Start
Tampilkan suhu