i
TUGAS AKHIR
SISTEM TAKAR OBAT SERBUK (
PUYER
)
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Elektro
Oleh:
EKO ARIANTO
NIM : 085114020
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
MEASURING SYSTEM DOSE SIZE OF POWDERS
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
EKO ARIANTO
NIM : 085114020
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Hidup itu Sederhana,
Ambil Kuputusan dan Jangan Menyesalinya
viii
INTISARI
Penggunaan obat serbuk masih banyak diminati oleh masyarakat Indonesia. Saat ini dokter juga menyarankan penggunaan obat serbuk bagi mereka yang kesulitan mengkonsumsi obat tablet atau kapsul, seperti pasien anak-anak atau pasien lanjut usia. Untuk mendapatkan obat serbuk terkadang pasien harus menunggu lama karena waktu pembuatan, penakaran/penimbangan ke dalam dosis-dosis yang masih manual. Bahkan dewasa ini peresepan obat puyer juga mengalami penurunan kualitas, karena beberapa permasalahan berhubungan dengan takaran obat serbuk seperti akurasi, efisiensi, dan
Human error. Sistem takaran obat otomatis adalah sebuah gagasan yang diharapkan dapat membantu permasalahan berhubungan dengan takaran obat serbuk. Pada sistem takar ini sistem akan membagi atau menakar obat serbuk otomatis dengan bantuan komputer, kontroler, dan perangkat mekanik.
Sistem takaran ini terdiri dari dua bagian utama yaitu hardware dan software. Bagian hardware terdiri dari perangkat mekanik dan rangkaian-rangkaian elektronis sebagai driver dan pengontrol. Sedangkan bagian software terdiri dari sistem kontrol seperti Visual Basic dan PLC (Programmable Logic Controller) yang bertugas memberikan semua tugas ke bagian hardware. Semua input atau perintah dilakukan melalui komputer (Visual Basic) yang kemudian akan meneruskannya ke PLC, kemudian PLC memerintahkan informasi dari komputer untuk dilaksanakan oleh bagian hardware. Alat ukur yang digunakan untuk melakukan penakaran adalah dengan menggunakan sensor berat Loadcell.
Sistem takaran obat serbuk ini sudah berhasil dibuat. Semua sistem hardware
dapat bekerja sesuai dengan yang diinginkan, seperti dapat melakukan pengukuran dan penakaran obat serbuk dengan output berupa tegangan dengan ketelitian sampai satuan
gram.
ix
ABSTRACT
The use of powder drugs are still in great demand by the people of Indonesia. Currently, doctors also recommend the use of the drug powder for those who have difficulty taking tablets or capsules, such as pediatric patients or elderly patients. To get the drug powder is sometimes patients have to wait long because the time of manufacture, dosing into the doses those are still manual. Even today prescribing the drug powder also decreased the quality, because some of the problems associated with dose powdered drug such as accuracy, efficiency, and human error. Automatic drug dosing system is an idea that is expected to help the problems associated with dose powdered drug. In this peck system will divide the system or automatic powder measure drug with the help of computers, controllers, and mechanical devices.
Dosing system consists of two main parts: hardware and software. Hardware part consists of mechanical devices and electronic circuits as drivers and controllers. While the software part consists of the control system such as Visual Basic and PLC (Programmable Logic Controller) which is responsible for providing all the tasks to the hardware. All input is done through a computer or command (Visual Basic), which will then forward it to the PLC, and PLC ordered information from the computer to be implemented by the hardware. The meter is used to make dosing is to use a weight sensor Loadcell.
This powder drug dosing system has been successfully established. All systems can work as expected, such as drug dosing can do powder into sections according to the size of the input with accuracy to the unit gram.
xi
DAFTAR ISI
HALAMAN JUDUL...i
HALAMAN JUDUL...ii
LEMBAR PERSETUJUAN...iii
LEMBAR PENGESAHAN...iv
PERNYATAAN KEASLIAN KARYA...v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP...vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS...vii
INTISARI...viii
ABSTRACT...ix
KATA PENGANTAR...x
DAFTAR ISI...xi
DAFTAR GAMBAR ...xiv
DAFTAR TABEL...xvi
BAB I PENDAHULUAN...1
1.1Latar belakang...1
1.2Tujuan dan manfaat...2
1.3Batasan masalah...2
1.4Metodologi penelitian...3
BAB II DASAR TEORI...4
xii
2.2 Inverting Amplifier...5
2.3 Konfigurasi IC LM741...6
2.4 Komparator tegangan...6
2.5 Limitswitch...7
2.6 Solenoid...8
2.7 Modul Analog Digital (CPM1A-MAD01)...9
BAB III PERANCANGAN PENELITIAN………...12
3.1 Bentuk umum alat...12
3.2 Perancangan timbangan menggunakan loadcell...14
3.3 Perancangan Meja putar...15
3.4 Perancangan Tabung obat...16
3.5 Perancangan tampungan gelas dan laci cadangan...17
3.6 Perancangan sensor...18
3.7 Perancangan gerak meja putar...19
BAB IV HASIL DAN PEMBAHASAN...21
4.1 Hasil implementasi alat...21
4.1.1 Perubahan konstruksi timbangan...21
4.1.2 Penggunaan solenoid digantikan dengan konstruksi motor DC...22
4.1.3 Perubahan posisi kotak penyimpanan...23
4.1.4 Penambahan sensor LDR……….24
4.1.5 Penambahan LPF pada rangkaian penguat………..25
xiii
4.2.1 Pengujian sensor infrared...28
4.2.2 Pengujian sensor LDR...29
4.2.3 Pengujian limitswitch dan meja putar...29
4.2.4 Pengujian katup motor…...……….……….31
4.2.5 Pengujian pengkondisi sinyal output loadcell...31
KESIMPULAN DAN SARAN...36
5.1 Kesimpulan...36
5.2 Saran...36
DAFTAR PUSTAKA...37
xiv
DAFTAR GAMBAR
Gambar 2.1 Loadcell...4
Gambar 2.2 Rangkaian jembatan whetstone...5
Gambar 2.3 Rangkaian penguat inverting...5
Gambar 2.4 Konfigurasi pin LM741...6
Gambar 2.5 Rangkaian komparator sederhana...7
Gambar 2.6 Konfigurasi kaki-kaki limitswitch...8
Gambar 2.7 Solenoid...8
Gambar 2.8 Ilustrasi masukan/keluaran pada MAD01...9
Gambar 3.1 Konsep dasar sistem...12
Gambar 3.21 Diagram gerak manual meja putar...13
Gambar 3.22 Diagram gerak manual penakar obat...13
Gambar 3.3 Skema rancangan timbangan...14
Gambar 3.4 Rangkaian penguat tegangan...15
Gambar 3.5 Desain meja...15
Gambar 3.6 Motor DC powerwindow...16
Gambar 3.7 Rancangan tabung...16
Gambar 3.8 Rancangan tampungan gelas takar...17
Gambar 3.9 Rancangan laci cadangan...18
Gambar 3.10 Perancangan sensor infrared...18
Gambar 3.11 Komparator tegangan...19
xv
Gambar 3.13 Rangkaian pemutar meja...20
Gambar 3.14 Diagram leader penyederhanaan...20
Gambar 4.1 Hasil implementasi alat...21
Gambar 4.2 Timbangan dengan sistem pengungkit...22
Gambar 4.3 Sistem konstruksi katup motor DC...22
Gambar 4.4 Hasil implementasi katup motor DC...23
Gambar 4.5 Rangkaian driver motor DC...23
Gambar 4.6 Tampilan kotak penyimpanan...24
Gambar 4.7 Rangkaian sensor LDR...24
Gambar 4.8 Posisi penempatan sensor LDR...25
Gambar 4.9 Rangkaian penguat non-inverting dengan LPF...26
Gambar 4.10 Rangkaian inverting sebagai penguat ketiga...27
Gambar 4.11 Hasil pengkabelan port input...28
Gambar 4.12 Hasil pengkabelan port output...28
Gambar 4.13 Posisi pemasangan limitswitch...30
xvi
DAFTAR TABEL
Tabel 2.1 Konfigurasi kaki-kaki limitswitch...8
Tabel 2.2 Spesifikasi masukan MAD01...9
Tabel 2.3 Spesifikasi keluaran MAD01...10
Tabel 2.4 Alokasi IR pada MAD01...10
Tabel 2.5 Alokasi chanel MAD01...11
Tabel 2.6 Seting range MAD01...11
Tabel 3.1 Data pengujian awal loadcell...14
Tabel 4.1 Hasil penguatan loadcell...27
Tabel 4.2 Hasil pengujian output sensor infrared...29
Tabel 4.3 Hasil pengujian output sensor LDR...29
Tabel 4.4 Hasil pengujian output limitswitch...30
Tabel 4.5 Hasil pengujian input meja putar...30
Tabel 4.6 Hasil pengujian input pada motor katup...31
Tabel 4.7 Hasil pengujian output rangkaian penguat...32
Tabel 4.8 Perbandingan hasil rangkaian penguat dengan perancangan...32
Tabel 4.9 Pengujian ketelitian timbangan dengan beban kecil...34
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Penggunaan obat serbuk, atau puyer, masih banyak diminati oleh masyarakat
Indonesia karena beberapa faktor yaitu :
1. Dosis obat dapat disesuaikan dengan berat badan anak secara lebih tepat.
2. Biayanya bisa ditekan menjadi lebih murah.
3. Obat yang diserahkan kepada pasien hanya satu macam, walaupun mengandung
banyak komponen.
Sampai saat ini obat serbuk ( puyer ) disarankan oleh dokter atau sang apoteker, bagi para
pasien yang mengalami kesulitan dalam mengkonsumsi obat tablet atau kapsul, seperti
pasien anak-anak atau pasien yang sudah lanjut usia. Sayangnya sang pasien harus lebih
lama menunggu di apotik sebelum membawa pulang obatnya, karena pembuatan puyer
membutuhkan waktu dalam proses penggerusan, pembagian / penakaran ke dalam
dosis-dosis sekali minum, maupun pada proses pengemasannya [1].
Dewasa ini peresepan obat puyer juga mengalami penurunan kualitas, karena
beberapa permasalahan berhubungan dengan takaran obat serbuk yang akan diteliti,
diantaranya:
1. Akurasi ( kerataan/kesamaan pembagian ).
Pada takaran obat secara manual, yang seringkali dilakukan dengan
menggunakan sendok takar, hasilnya tidak selalu sama antara sendokan pertama,
kedua, ketiga dan seterusnya mengingat bahwa proses ini memang tidak presisi,
padahal takaran dosis obat serbuk menggunakan satuan ukuran milligram (mg)
[1].
2. Efisiensi.
Ini berhubungan dengan waktu kerja. Biasanya untuk obat-obat tertentu yang
memerlukan ketelitian tinggi yang wajib menggunakan timbangan dalam
penakarannya akan membutuhkan waktu yang lama jika dilakukan dengan
2
3. Human error.
Metode manual yang hampir semua prosesnya dilakukan langsung oleh manusia
memiliki prosentase Human Error yang tinggi. Dalam proses pembuatan obat
serbuk ( puyer ), proses yang banyak memakan waktu adalah proses pembagian
takaran dosis agar dapat langsung dikonsumsi. Hal ini dikarenakan dalam proses
pembagian dosis dari hasil gerusan obat tersebut, masih banyak apotik maupun
rumah sakit masih menggunakan metode manual yaitu dengan sendok takar atau
timbangan manual. Hal ini tentu kurang efektif jika dilihat dari segi waktu. Selain
itu penggunakan metode manual dapat menghasilkan takaran obat yang tidak
akurat. Ini bisa saja menjadi dampak yang sangat berbahaya mengingat ini adalah
ukuran obat. Sedikit saja kelebihan takaran/dosis bisa berakibat fatal pada
pengguna.[1]
Oleh sebab itu, dibutuhkan suatu alat yang dapat membagi / menakar hasil
gerusan obat tersebut dengan bobot seragam dan lebih presisi. Selagi alat tersebut
melakukan tugasnya, yaitu membagi hasil gerusan obat yang sudah jadi, sang apoteker
dapat melakukan pekerjaan lain seperti menggerus bahan obat lainnya, sehingga efektifitas
waktu bertambah. Pada kesempatan ini, peneliti mencoba untuk membuat alat tersebut
sehingga ilmu yang di pelajari di perkuliahan dapat diterapkan untuk membantu mencoba
mencari solusi yang dapat berguna.
1.2.
Tujuan dan Manfaat
Tujuan penelitian ini adalah menghasilkan alat penakar dosis obat serbuk (puyer)
dengan output berupa tegangan, serta mempunyai manfat secara spesifik yaitu :
a. Sebagai penyedia input untuk langkah otomatisasi alat takar obat serbuk.
b. Alat ini merupakan hardware yang berfungsi sebagai acuan untuk menciptakan alat
takar obat serbuk otomatis.
1.3.
Batasan Masalah
Batasan-batasan masalah dalam penelitian ini adalah:
3
b. Hardware lain yang dibuat untuk kelengkapan sitem adalah tempat gelas, meja
putar, dan laci cadangan.
c. Menitik beratkan pada ketelitian timbangan.
d. Menggunakan sensor berat loadcell dengan kapasitas rendah untuk mencapai
ketelitian milligram.
e. Berat maksimal yang dapat ditakar adalah 150 gram.
f. Ketelitian maksimum dalam satuan miligram.
g. Uji hardware selain timbangan akan dijalankan manual sebatas untuk pengujian
yang nantinya akan digabungkan dengan sistem lain.
h. Akan digunakan juga beberapa sensor untuk kelengkapan sistem ini.
1.4.
Metodologi Penelitian
Beberapa langkah yang akan dilaksanakan sebagai metode untuk penulisan skripsi
ini yaitu :
a. Pengumpulan bahan-bahan referensi berupa buku dan jurnal-jurnal.
b. Perancangan subsistem hardware dan software . Tahap ini bertujuan untuk mencari
bentuk model yang optimal dari sistem yang akan dibuat dengan
mempertimbangkan berbagai faktor permasalahan dan kebutuhan.
c. Pembuatan hardware. Setelah melihat hasil dari perancangan yang sudah dilakukan
tahap selanjutnya adalah membuat hardware yaitu dengan memulai membuat
bagian per bagian yaitu mulai dari kerangka, dudukan timbangan, sampai dengan
bagian-bagian kecil dari bentuk utuh yang telah dirancang kemudian dilanjutkan
dengan perakitan. Setelah semua perakitan hardware selesai maka akan dilanjutkan
dengan pengujian hardware secara manual.
d. Proses pengambilan data. Proses pengambilan data pertama dilakukan dengan cara
mencoba sistem yang telah dibuat, yaitu dengan mencoba memberikan input secara
manual dan mencoba menjalankan fungsi sistem hardware tersebut.
e. Analisa dan penyimpulan. Setelah dilakukan pengambilan data maka keakuratan
dan kepresisian sistem akan diketahui sehingga dapat disimpulkan kalau sistem ini
dapat bekerja sebagaimana fungsinya. Penyimpulan hasil percobaan dapat
4
BAB II
DASAR TEORI
2.1
Loadcell
Loadcell adalah sebuah sensor yang berfungsi untuk merubah gaya tekan atau
gaya tarik menjadi besaran tegangan listrik. Sebenarnya loadcell ini dibentuk dari
tranduser atau sensor tekan yang biasa disebut Strain gage. Dibentuk dengan konfigurasi
Bridge (jembatan resistansi), untuk lebih jelasnya lihat gambar 2.1.
Gambar 2.1 Loadcell
Kedua ujung yang pertama diberi tegangan atau di eksitasi, sedangkan kedua
ujung lainnya sebagai output. Karena Loadcell ini dibentuk dari empat buah straingage
dimana tiap straingage akan mengalami perubahan resistansi bila diberi gaya tekan. Maka
sesuai dengan teori Bridge maka akan terjadi perubahan atau beda tegangan pada tiap
ujung Bridge tadi. Tapi karena perubahan tegangan output yang terjadi akibat tekanan
sangat kecil, maka untuk digunakan dalam sebuah sistem kontrol harus dimasukan ke
dalam signal amplifier untuk dikuatkan [4]
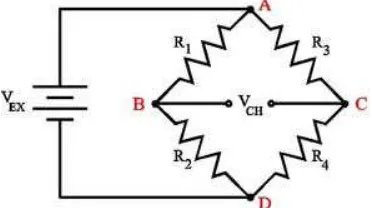
Rangkaian jembatan Whetstone dapat dilihat pada gambar 2.2, dari rangkaian itu
diaplikasi menjadi sebuah Loadcell. Dari gambar 2.2 tersebut terdapat beberapa persamaan
5
Gambar 2.2 Rangkaian jembatan Whetstone
Pada gambar 2.2 obyek dengan tanda Vch adalah detektor setimbang yang
digunakan untuk membandingkan potensial titik B dan C dari rangkaian. Jika detektor
setimbang dianggap tidak terhingga nilainya maka:
ΔV = VB – VC (2.1) VB adalah potensial titik B terhadap titik D dan VC potensial titik C terhadap titik D, maka:
VB=
(2.2)
VC= (2.2)
Dari kombinasi persamaan 2.1, 2.2, dan 2.3 didapat persamaan 2.4 yaitu:
R2 x R3=R1 x R4 (2.4)
2.2
Inverting Amplifier
Rangkaian dasar penguat inverting adalah seperti yang ditunjukkan pada gambar
2.3, dimana sinyal masukannya dibuat melalui input inverting. Seperti namanya bahwa
fase keluaran dari penguat inverting ini akan selalu berbalikan dengan inputnya. Pada
rangkaian ini, umpanbalik negatif di bangun melalui resistor R2 [3].
6
Input non-inverting pada rangkaian ini dihubungkan ke ground atau v+
Vout=
-
x Vin (2.5)= 0.
Untuk menentukan nilai-nilai komponennya dapat digunakan persamaan berikut:
2.3
Konfigurasi IC LM741
Dalam penelitian ini IC Op-Amp yang digunakan adalah LM741. LM741 dipilih
karena banyak tersedia dipasar dengan harga yang relatif murah sehingga peneliti dapat
dengan mudah mendapatkannya [5]
Gambar 2.4 Konfigurasipin LM741
Konfigurasi pin LM 741 dapat dilihat pada gambar 2.4.
a. Pin 4 (-V) dan pin 7 (+V). Pin ini berfungsi sebagai input supply LM741.
b. Pin 2 merupakan inverting input.
c. Pin 3merupakan Non-inverting input yang berfungsi sebagai titik referensi
yang berguna untuk membalik input inverting.
d. Pin 6 merupakan pin yang berfungsi sebagai output dari LM741.
e. Pin 1, 5, dan 8 adalah Offset null dan NC.
2.4
Komparator Tegangan
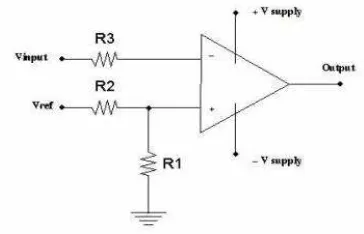
Komparator tegangan adalah sebuat rangkaian yang dapat membandingkan besar
tegangan input. Komparator tegangan biasanya menggunakan Op-Amp sebagai piranti
7
Gambar 2.5 Rangkaian komparator sederhana
Pada rangkaian R1 dan R2 digunakan sebagai pembagi tegangan, sehingga
tegangan yang direferensikan adalah sebesar Vref yang besarnya bisa dihitung dengan
persamaan 2.6.
Vref = x Vsupply (2.6)
Op-Amp tersebut akan membandingkan input inverting (-) dan input non-inverting
(+). Jika Vin lebih besar dari Vref maka output sebesar –Vsupply, sebaliknya jika Vin lebih
kecil Vref maka outputnya adalah sebesar +Vsuplly [2].
2.5
Limitswitch
Limitswitch adalah sensor yang bersifat mekanis dan mendeteksi sesuatu setelah
terjadi kontak fisik. Limitswitch memiliki dua kontak, yaitu normally open dan normally
close. Saat sistem menggunakan kontak normally open dari limitswitch, maka dalam
keadaan normal limitswitch tidak mengalirkan arus dari satu penghantar ke penghantar
yang lain. Limitswitch akan mengalirkan arus ketika kepala limitswitch tertekan. Begitu
pula sebaliknya, jika sistem menggunakan kontak normally close dari limitswitch, maka
dalam keadaan normal limitswitch akan mengalirkan arus dari satu penghantar ke
penghantar yang lain. Limitswitch akan memutuskan kontak ketika kepala limitswitch
8
Gambar 2.6 Konfigurasi Kaki-kaki Limit Switch [11]
Tabel 2.1 Konfigurasi Kaki-kaki Limit Switch [10]
No. Kaki Keterangan
1 Common
2 Normally Open
3 Kepala Limit Switch
4 Normally Close
2.6
Solenoid
[9]
Suatu solenoid adalah suatu alat dasar yang mengkonversi suatu sinyal listrik ke
dalam gerakan mekanis, pada umumnya seperti garis. Seperti ditunjukkan Gambar 2.7
solenoid terdiri dari suatu kumparan dan alat pengisap. Pengisap tersebut mungkin adalah
freestanding atau dimuati pegas. Kumparan mempunyai beberapa rating tegangan atau arus
dan tipenya mungkin DC atau AC.
Spesifikasi Solenoid meliputi rating listrik dan gaya pengisap menarik atau
mendorong ketika yang diberi tegangan tertentu. Gaya ini mungkin dinyatakan dalam
newton atau kilogram di dalam sistem SI, dan dalam pound atau ons dalam Sistem Inggris.
Beberapa solenoid terbatas hanya untuk tugas sebentar-sebentar oleh karena batasan yang
berkenaan dengan panas. Dalam hal ini, duty cycle maksimum (persentase total waktu)
akan ditetapkan.
9
2.7
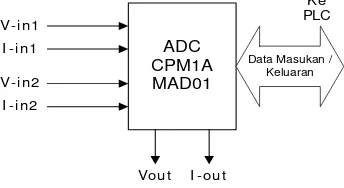
Modul Analog Digital (CPM1A - MAD01)
MAD01 mempunyai dua fungsi, yaitu mengubah sinyal analog menjadi sinyal
digital dan sebaliknya, mengubah sinyal digital menjadi sinyal analog. Dalam MAD01
terdapat empat masukan analog, masing-masing dua input arus dan dua input tegangan,
kemudian juga terdapat dua output analog, yaitu tegangan dan arus. Data input atau output
delapan bit yang dihubungkan dengan PLC dapat diatur sebagai input atau output,
tergantung apakah MAD01 difungsikan sebagai pengubah analog ke digital atau
sebaliknya. Gambar 2.8 memperlihatkan ilustrasi masukan / keluaran pada MAD01.
ADC CPM1A MAD01
V- i n 1 I - i n 1 V- i n 2 I - i n 2
Data Masukan / Keluaran
Vou t I - ou t
Ke PLC
Gambar 2.8 Ilustrasi masukan / keluaran pada MAD01
Tabel 2.2 memperlihatkan spesifikasi masukan pada MAD01 dan Tabel 2.3
memperlihatkan spesifikasi keluarannya.
Tabel 2.2 Spesifikasi masukan MAD01
Range sinyal
Masukan
Tegangan masukan 0V s/d 10V atau +1V s/d +5V
Arus masukan 4mA s/d 20mA
Resolusi
Tegangan masukan 1/ 256
Arus masukan 1/ 256
Akurasi
Tegangan masukan 1.0 % max (skala maksimum)
Arus masukan 1.0 % max (skala maksimum)
Sinyal masukan
maksimal
Tegangan masukan ± 15V kontinyu
10
Setelah diketahui spesifikasi masukan atau keluaran juga hal-hal yang berkaitan
dengan instalasi, perlu juga mengetahui alokasi bit Internal Relay (IR). Tabel 2.3
memperlihatkan alokasi Internal Relay (IR) pada MAD01.
Tabel 2.3 Spesifikasi keluaran MAD01
Range sinyal
keluaran
Tegangan keluaran 0V s/d 10V atau -10V s/d +10V
Arus keluaran 4mA s/d 20mA
Resolusi
Tegangan keluaran
1/ 256 (0V s/d 10V)
1/ 512 (-10V s/d 10V)
Arus keluaran 1/ 256
Akurasi
Tegangan keluaran 1.0 % max (skala maksimum)
Arus keluaran 1.0 % max (skala maksimum)
Tabel 2.4 Alokasi IR pada MAD01
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
s/b x x x x x x x d d d d d d d d
Keterangan table 2.4 :
• Bit 0 s/d 7 : bit data
• Bit 8 s/d 14 : bit tidak digunakan
• Bit 15 : s adalah sign bit; jika 0 tegangan output positif, kalau 1 keluaran
negatif
: b adalah broken wire bit; jika 0 maka tidak ada kerusakan, kalau 1
ada kerusakan.
Untuk dapat membaca tegangan input, maka pada MAD01 perlu diketahui alokasi
channel yang akan digunakan. Alokasi channel MAD01 yang diberikan tergantung dengan
11
Tabel 2.5 Alokasi channel MAD01
CPU Channel keluaran
MAD01
Channel masukan1
MAD01
Channel masukan2
MAD01
10CDx 11 1 2
20CDx 11 1 2
30CDx 12 2 3
40CDx 12 2 3
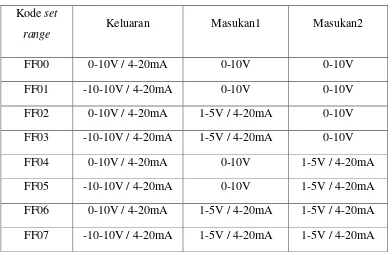
Langkah selanjutnya menempatkan MAD01 tersebut pada range yang di
kehendaki. Setting range diberikan saat inisialisasi MAD01. Setting range MAD01
ditunjukkan pada Tabel 2.6
Tabel 2.6 Setting range MAD01
Kode set
range Keluaran Masukan1 Masukan2
FF00 0-10V / 4-20mA 0-10V 0-10V
FF01 -10-10V / 4-20mA 0-10V 0-10V
FF02 0-10V / 4-20mA 1-5V / 4-20mA 0-10V
FF03 -10-10V / 4-20mA 1-5V / 4-20mA 0-10V
FF04 0-10V / 4-20mA 0-10V 1-5V / 4-20mA
FF05 -10-10V / 4-20mA 0-10V 1-5V / 4-20mA
FF06 0-10V / 4-20mA 1-5V / 4-20mA 1-5V / 4-20mA
12
BAB III
RANCANGAN PENELITIAN
1.1
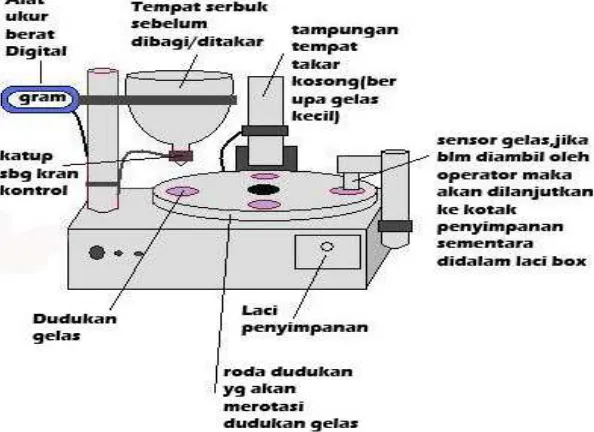
Bentuk Umum Alat
Sistem ini merupakan sistem yang keseluruhan bagiannya terdiri dari hardware,
karena sistem ini ditekankan pada bagian timbangan untuk ketelitiannya dan penakar obat
puyer. Bagian-bagian sistem ini diantaranya adalah:
a. Bagian utama berupa timbangan
b. Tampungan obat serbuk
c. Tampungan gelas
d. Katup sebagai kran kontrol
e. Meja putar beserta dudukan gelas
f. Dan beberapa sensor yang dipasang pada bagian tampungan gelas, meja putar, dan
pada laci penyimpanan.
Untuk lebih jelasnya bisa dilihat konsep rancangan umumnya yang ditunjukkan
pada gambar 3.1.
13
Alur/urutan kerja dari sistem keseluruhan dimulai dari proses menjatuhkan gelas
dari tampungan gelas ke meja putar dimana sudah ada dudukan gelasnya. Saat gelas sudah
dijatuhkan ke dudukan maka meja putar akan berputar berlawanan arah jarum jam sebesar
90 derajat, lalu katup pada tampungan obat serbuk akan membuka dan mengisikan obat
serbuk ke dalam gelas sampai ukuran yang diinginkan yang kemudian setelah terpenuhi
katup akan tertutup kembali. Pada proses pengisian ini buka tutup katup berdasarkan hasil
pembacaan timbangan. Setelah selesai pengisian dan katup telah tertutup maka tampungan
gelas akan menjatuhkan gelas lagi dan meja putar akan berputar kembali sebesar 90°.
Gelas yang sudah berisi siap diambil oleh operator yang kemudian proses dapat berlanjut.
Untuk mengantisipasi kemungkinan operator tidak ada di tempat agar sistem tetap berjalan.
Oleh karena itu alat tersebut dilengkapi dengan laci penyimpanan yang akan menampung
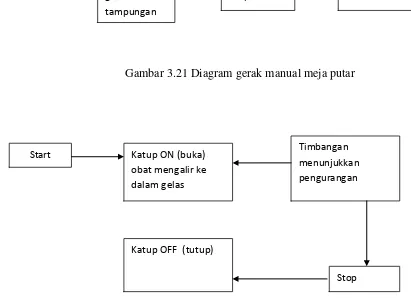
gelas yang sudah berisi obat yang tidak terambil oleh operator. Konsep gerakan manualnya
bisa dilihat gambar 3.21 dan gambar 3.22.
Gambar 3.21 Diagram gerak manual meja putar
Gambar 3.22 Diagram gerak manual penakar obat
Melepas gelas dari tampungan
Meja
berputar 90°
Katup ON (buka) obat mengalir ke dalam gelas Timbangan menunjukkan pengurangan Meja berhenti
Katup OFF (tutup) Start
Start
14
1.2
Perancangan Timbangan dengan Menggunakan
Loadcell
Rancangan timbangan ini menggunakan loadcell sebagai sensor beratnya. Untuk
lebih jelasnya lihat gambar 3.3.
Gambar 3.3. Skema rancangan timbangan
Saat loadcell mendapat tekanan (terbebani) maka akan keluar output yang berupa
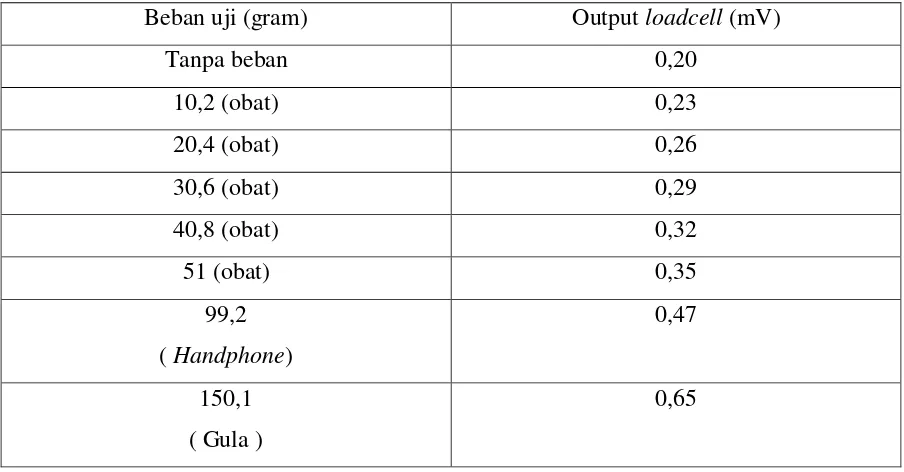
tegangan. Tegangan output loadcell nilainya sangat kecil yaitu dalam satuan milivolt. Data
output loadcell yang digunakan setelah dilakukan pengujian awal dapat dilihat pada tabel
3.1. Pada pengujian digunakan sumber tegangan sebesar 5V.
Tabel 3.1 Data pengujian awal output loadcell
Beban uji (gram) Output loadcell (mV)
Tanpa beban 0,20
10,2 (obat) 0,23
20,4 (obat) 0,26
30,6 (obat) 0,29
40,8 (obat) 0,32
51 (obat) 0,35
99,2
( Handphone)
0,47
150,1
( Gula )
0,65
Sistem dalam penelitian ini akan digabungkan dengan sistem peneliti lain yang
berupa kontrol PLC. Untuk memberi input ke ADC (Analog to Digital Converter) pada
PLC output dari loadcell terlalu kecil. Pada tabel 2.2 tegangan input MAD01 adalah 0V s/d
10V dengan resolusi 1/256, untuk keamanan tegangan masukan yang digunakan adalah 0V
s/d 5V. Pada pengujian awal loadcell seperti pada tabel 3.1 kenaikan output pada beban
maksimal 150,1 gram adalah sebesar 0,45 mV, maka penguatan pada output beban
maksimum 5V/0,45mV yaitu sebesar 11.111,11 dan dibulatkan menjadi 10.000 kali supaya
15
lebih mudah dalam mencari ukuran komponen penguat. Pada rangkaian penguat tegangan
menggunakan tiga resistor R1, R2, R3 dan sebuah potensiometer. Nilai-nilai resistor yang
digunakan adalah R1= R3= 1kΩ , R2= 100kΩ, dan besarnya potensiometeradalah 100kΩ. Penguat ini menggunakan rangkaian inverting amplifier dengan perhitungan nilai-nilai
komponennya mengacu pada persamaan 2.1 di bagian dasar teori untuk lebih jelasnya lihat
gambar 3.4.
Gambar 3.4. Rangkaian penguat tegangan
1.3
Perancangan Meja Putar
Rancangan meja putar berbentuk lingkaran yang digerakkan menggunakan motor
DC. Ukuran dan bentuk rancangan bisa dilihat pada gambar 3.5.
16
Motor DC yang digunakan adalah motor DC powerwindow karena dilengkapi
dengan Internal Gearbox dengan susunan ulir cacing sehingga mempunyai torsi yang
tinggi dan juga saat motor berhenti tidak terjadi kelembaman. Keuntungan lain adalah
suplai tegangan input yang dibutuhkan relatif kecil yaitu 12 Vdc [7]. Bentuk motor DC
powerwindow dapat dilihat pada gambar 3.6.
Gambar 3.6 Motor DC Powerwindow
1.4
Perancangan Tabung Obat
Tabung obat adalah tempat penampung obat sebelum ditakar. Tabung inilah yang
terkait/terhubung dengan timbangan sehingga berat obat bisa diketahui. Rancangan tabung
pada bagian ujung dibuat dengan kemiringan sudut 35° supaya aliran obat saat pengisian
ke dalam gelas lancar [6]. Kemiringan sudut dan detail rancangan bisa dilihat pada gambar
3.7.
17
Pada ujung tabung obat akan dipasang sebuah solenoid valve yang berfungsi
sebagai kran untuk membuka dan menutup tabung obat. Jadi aliran obat akan dikendalikan
oleh solenoid melalui sebuah tombol push-button.
1.5
Perancangan Tampungan Gelas dan Laci Cadangan
a. Tampungan gelas
Tampungan gelas terletak di sebelah kiri tabung obat (lihat gambar 3.1). Tujuan
tampungan gelas ini adalah sebagai tempat tumpukan gelas sebelum dilepaskan
otomatis saat proses dimulai. Untuk melepas gelas digunakan solenoid model
push. Rancangan bentuknya dapat dilihat pada gambar 3.8.
Gambar 3.8 Rancangan tampungan gelas takar
b. Laci cadangan
Laci berfungsi sebagai tempat cadangan jika gelas takar yang sudah terisi obat
tidak diambil operator. Bagian meja putar dilubangi pada bagian bawah sehingga
saat ada gelas yang tidak diambil operator gelas tersebut akan jatuh ke dalam laci
cadangan tersebut. Di bagian atas lubang tersebut terpasang sensor infrared untuk
mendeteksi bahwa gelas sudah masuk ke dalam laci cadangan. Bentuk detailnya
18
Gambar 3.9 Rancangan laci cadangan
1.6
Perancangan Sensor
Pada sistem ini ada tiga sensor di luar timbangan yaitu:
a. Sensor pada tampungan gelas, digunakan sensor infrared.
b. Sensor pada meja putar yang berfungsi untuk memberikan perintah saat meja putar
harus berhenti, menggunakan limit switch.
c. Sensor pada laci cadangan untuk mendeteksi bahwa gelas sudah masuk ke dalam laci,
menggunakan sensor infrared.
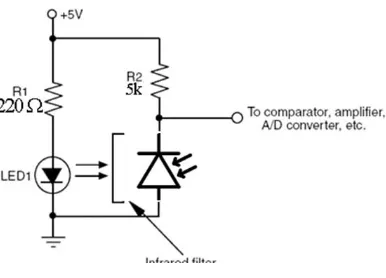
Perancangan sensor infrared seperti terlihat pada gambar 3.10. komponen yang
digunakan yaitu 2 buah resistor R1 dan R2 masing-masing bernilai 220 ohm dan 5000
ohm[8].
19
Kemudian output dari sensor akan dilanjutkan sebagai input rangkaian
komparator. Rancangan komparator tegangan mengacu pada gambar 2.4 dan persamaan
2.2 pada bagian dasar teori. Gambar rangkaiannya adalah seperti pada gambar 3.11.
Gambar 3.11 Komparator tegangan
R1 yang digunakan sebesar 1000 ohm, R2 dan R3 sebesar 1000 ohm dengan
tujuan untuk mendapatkan nilai Vref setengah dari Vsuplly mengacu dari persamaan 2.2
pada dasar teori.
1.7
Perancangan Rangkaian Gerak Meja Putar
Rangkaian ini berfungsi untuk melakukan pengujian pada meja putar. Untuk
memberikan input melalui tombol sampai proses selesai dibutuhkan 4 buah limit switch
sebuah tombol push-button dan 2 buah relay.
20
Posisi limit switch dapat dilihat pada gambar 3.12. Bagian yang menonjol
berwarna hitam itu adalah stoper yang berfungsi sebagai pemberi input pada limit switch.
Saat meja berputar kemudian stopper menyetuh salah satu dari limit switch maka motor
penggerak meja akan berhenti. Rangkaiannya bisa dilihat pada gambar 3.13.
Gambar 3.13 Rangkaian pemutar meja
Empat buah Limit switch pada rangkaian tersusun seri masing-masing
menggunakan kaki normally close sedangkan dua buah relay masing-masing
menggunakan kaki normally open. Jika rangkaian pada gambar 3.13 dilihat dalam bentuk
ladder maka akan menjadi seperti pada gambar 3.14.
21
BAB IV
HASIL DAN PEMBAHASAN
4.1
Hasil Implementasi Alat
Hasil implementasi alat tidak sepenuhnya sesuai dengan perancangan. Ada perubahan di
beberapa bagian mekanik karena penyesuaian ukuran dan fungsi. Perbandingan hasil
implementasi alat dengan perancangan bisa dilihat pada gambar 3.1 pada bagian
perancangan dan hasil implementasinya pada gambar 4.1.
Gambar 4.1 Hasil implementasi alat
4.1.1
Perubahan Bentuk Konstruksi Timbangan (
Loadcell
)
Timbangan dibuat dengan sistem pengungkit dengan beban akan menumpu
langsung pada loadcell. Pada titik berat pengukit digunakan sepasang bearing untuk
memperkecil gesekan sehingga pengukuran lebih baik. Perubahan ini dilakukan karena
pembuatan sistem sesuai perancangan tidak memungkinkan melihat bentuk dan ukuran
22
Gambar 4.2 Timbangan dengan sistem pengungkit
4.1.2
Penggunaan
Solenoid
Sebagai Katup Digantikan dengan
Konstruksi Motor DC.
Alasan tidak menggunakan solenoid adalah karena sulitnya mendapatkan barang
tersebut. Penulis sudah mencoba mencari informasi kepada distributor-distributor dan
ternyata hasilnya nihil. Oleh karena itu penulis menggunakan konstruksi dengan penggerak
motor DC sebagai katupnya. Motor digunakan untuk menggerakkan sebuah katup yang
akan bergeser bolak-balik sehingga bisa menutup dan membuka lubang keluaran pada
tampungan obat. Pada saat motor berputar searah jarum jam maka katup akan menutup
lubang saluran obat dan kebalikanya jika motor bergerak berlawanan arah jarum jam maka
katup akan membuka. Ada dua stoper yang digunakan sebagai penahan supaya katup
berfungsi. Sistem konstruksi katup dapat dilihat pada gambar 4.3, sedangkan gambar hasil
implementasinya dapat dilihat pada gambar 4.4.
23
Gambar 4.4 Hasil implementasi katup motor DC
Sebagai kontrol untuk putaran bolak-balik motor digunakan rangkaian driver
dengan menggunakan relay. Rangkaian tersebut dapat dilihat pada gambar 4.5.
Gambar 4.5 Rangkaian driver motor DC katup
RL1 dan RL2 berfungsi sebagai kontak positif dan ground yaitu masing-masing relay
memiliki dua common. RL3 dan RL4 berfungsi sebagai pengaman untuk saling memutus
sehingga tidak terjadi dua input yang bersamaan.
4.1.3
Penempatan
Tempat Penyimpanan Hasil Takaran Obat
Sementara.
Perubahan penempatan kotak penyimpanan yang berfungsi untuk menyimpan
gelas takar yang sudah terisi obat ini hanya pada posisinya. Pada perancangan kotak ini
ditempatkan di bagian depan alat, sedangkan pada implementasinya penulis mengubahnya
ke bagian sisi kiri alat. Perubahan ini dilakukan penulis karena pada bagian sisi depan alat
24
Selain itu, jika ditempatkan pada sisi kiri kotak penyimpanan ini akan berfungsi lebih baik
dan lebih sederhana dalam konstruksi. Tampilan hasil implementasinya dapat dilihat pada
gambar 4.6.
Gambar 4.6 Tampilan kotak penyimpanan
4.1.4
Penambahan Sensor LDR (
Light Dependent Resistor
)
Pada perancangan terdapat dua sensor yaitu sebagai pendeteksi keberadaan gelas
takar dan pada bagian kotak penyimpanan. Pada perkembangannya dibutuhkan sensor
tambahan pada setiap posisi gelas takar, yaitu sebanyak empat posisi. Tiga posisi
digunakan sensor LDR dan satu posisi pada kotak penyimpanan penulis menggunakan
sensor infrared dengan alasan fungsional mekanik. Skema rangkaian elektriknya dapat
dilihat pada gambar 4.7.
Gambar 4.7 Rangkaian sensor LDR
Ada empat posisi pada meja putar yang dilalui gelas takar, dan tiga diantaranya
terpasang sensor LDR yang digunakan untuk mendeteksi keberadaan gelas takar.
Penempatan sensor LDR bisa dilihat pada gambar 4.8 yaitu dengan cara dibenamkan pada
25
Gambar 4.8 Posisi penempatan sensor LDR
4.1.5
Penambahan Rangkaian LPF (
Low Pass Filter
) pada Penguat
Tegangan Output
Loadcell
.
Tegangan output dari Loadcell sangat kecil yaitu hanya dalam satuan milivolt.
Semua tidak sesuai dengan yang direncanakan pada perancangan, rangkaian penguat yang
dirancang penulis untuk output loadcell mengalami kegagalan. Penelitian pertama penulis
menggunakan IC LM741 sebagai penguat dan tidak berhasil, kemudian penulis mencoba
IC lain seperti LM324 dan LM358 namun hasilnya sama. Dari penelitian itu diketahui
bahwa ternyata IC yang telah digunakan tidak mempunyai input offset tegangan yang
cukup untuk input dalam satuan milivolt. Setelah mencari banyak informasi penulis
menemukan jenis IC Op Amp dengan input offset tegangan kecil sekitar 75 V yaitu IC
OP07. Walaupun secara teori menggunakan IC ini sudah mencukupi dan seharusnya
mampu memberikan penguatan tetapi ternyata penelitian mengalami kesulitan karena
rangkaian penguat tetap tidak berhasil. Lebih dari satu bulan penelitian tentang penguatan
tegangan ouput loadcell dilakukan, mulai dari rangkaian penguat inverting sampai
rangkaian instrumentasi.
Loadcell yang terbuat dari logam bisa saja menangkap sinyal liar layaknya sebuah
antena, karena output dari loadcell merupakan sinyal berfrekuensi rendah maka pada
penelitian selanjutnya dipasang sebuah filter untuk menghilangkan sinyal frekuensi tinggi
yang tidak lain adalah noise. Filter yang digunakan sebelum output loadcell dikuatkan
adalah LPF pasif, gambar rangkaiannya dapat dilihat pada gambar 4.9 dengan IC yang
26
Gambar 4.9 Rangkaian penguat non-inverting dengan LPF
Besarnya penguatan (A) non-inverting dapat dihitung dengan persamaan 4.1.
A= ...(4.1)
Besarnya frekuensi cutoff (Fc) pada LPF dapat dihitung dengan persamaan 4.2.
Fc=
.
...(4.2)Besarnya frekuensi cut-off LPF, yaitu
Fc = = 1,59 Hz
Pada saat nilai minimal, yaitu R10 = 0Ω.
Amin =
Amin = 31
Pada saat nilai maksimal, yaitu R10 = 100kΩ.
Amin = = 41
Nilai penguatan pada penguatan kedua adalah:
27
Jadi jumlah penguatan rangkaian pada gambar 4.9 adalah 241,8 sampai dengan
319,8 kali, yaitu saat R10 minimal sebesar 241,8 kali dan saat R10 maksimal sebesar 319,8
kali. Karena dari penguatan tersebut output yang didapat adalah tegangan minus dan
nilainya masih terlalu kecil untuk input PLC maka ditambahkan sebuah penguat inverting.
Rangkaian penguat ketiga dengan menggunakan IC OP07 dapat dilihat pada gambar
rangkaian 4.10.
Gambar 4.10 Rangkaian inverting sebagai penguat ketiga.
Besar penguatan ketiga ini adalah sebesar RF/R1 yaitu sebesar 45,45 kali. Dengan
ditambahkannya penguat ketiga ini maka penguatan total mencapai 10.989,01 sampai
14.534,91 kali. Hasil semua perhitungan penguatan dapat dilihat pada tabel 4.1.
Tabel 4.1 Hasil penguatan output Loadcell.
Rangkaian
penguat
Besarnya penguatan
secara teori
Masing-masing
penguat
Output penguatan secara teori
Potensiometer R10
Minimal (0Ω)
Potensiometer R10
Maksimal (100Ω)
Penguat I 31 - 41 31 41
Penguat II 7,8 241,8 319,8
28
Perubahan-perubahan tersebut dilakukan untuk memenuhi tujuan dari penelitian
walaupun hasilnya belum maksimal. Setelah pengerjaan semua perangkat selesai maka
penulis melakukan pengkabelan dari semua input dan ouput yang ada untuk
dikomunikasikan dengan PLC. Dari semua bagian perangkat mekanik keseluruhan terdapat
sepuluh input ouput (IO) dan sebuah saluran untuk ground (GND). Dari semua IO tersebut
penulis membaginya menjadi dua bagian dengan port yang berbeda, yaitu delapan pin
dalam satu port berupa inputan PLC dan tiga pin dalam port lain berupa output dari PLC.
Hasil pengkabelan dapat diliat pada gambar 4.11 dan gambar 4.12.
Gambar 4.11 Hasil pengkabelan port input
Gambar 4.12 Hasil pengkabelan port output
4.2
Hasil Pengujian
4.2.1
Pengujian Sensor
Infrared
Sensor ini dipasang untuk mendeteksi kotak penyimpanan jika gelas takar yang
ditampung penuh. Pengujian dilakukan dengan menempatkan gelas takar di depan sensor
dan diukur tegangan outputnya. Dari hasil pengujian sensor ini bekerja dengan baik,
29
Tabel 4.2 Hasil pengujian output Sensor Infrared
Pengujian Output tegangan ( Volt )
Tidak ada gelas takar Ada gelas takar
Sensor Infrared 0 10,50
Pada perancangan sensor infrared dilewatkan rangkaian pembanding sehingga seharusnya
outputnya adalah sebesar tegangan supply yaitu 12V. Pada hasil implementasinya hanya
didapat output sebesar 10,50 V seperti pada tabel 4.1, namun demikian sensor ini masih
bekerja dengan baik karena PLC masih bisa membaca input sebesar itu.
4.2.2
Pengujian Sensor LDR
Pengujian sensor ini dilakukan dengan meletakkan gelas takar pada posisi
dudukan di meja putar sehingga gelas takar menutup LDR dari sinar luar. Pada saat
pengujian tegangan output diukur dan hasilnya dapat dilihat pada tabel 4.3.
Tabel 4.3 Hasil pengujian output Sensor LDR
Pengujian Tegangan output ( volt )
Tidak ada gelas takar Ada gelas takar
Sensor LDR I 0 10,36
Sensor LDR II 0 10,41
Sensor LDR III 0 10,40
Pada rangkain sensor ini menggunakan relay sebagai kontak seperti pada gambar 4.7.
Output seharusnya jika melihat gambar 4.7 adalah sebesar 12V namun pada pengujian
hasilnya hanya sekitar 10,40 V. Walaupun outputnya tidak sesuai dengan perancangan,
namun sensor ini bekerja dengan baik karena tegangan sebesar 10,40V masih dapat dibaca
PLC sebagai input.
4.2.3
Pengujian
Limitswitch
dan Meja Putar
Ada empat buah limitswitch yang terpasang di tiap posisi, pengujian dilakukan
30
pemasangan limitswitch dapat dilihat pada gambar 4.13. Dari hasil pengujian didapatkan
hasil seperti pada tabel 4.4.
Gambar 4.13 Posisi pemasangan limitswitch
Tabel 4.4 Hasil pengujian output Iimitswitch
Pengujian Input Output (V)
Limitswitch I Ditekan 10,53
Tidak ditekan 0
Limitswitch II Ditekan 10,52
Tidak ditekan 0
Limitswitch III Ditekan 10,53
Tidak ditekan 0
Limitswitch IV Ditekan 10,54
Tidak ditekan 0
Limitswitch dihubungkan pada sumber tegangan seperti pada tabel 4.4 bahwa outputnya
sekitar 10,53V yang masih bisa dibaca PLC dengan baik.
Meja putar dan limitswitch akan saling berhubungan, limitswitch berfungsi untuk
menghentikan putaran meja. Terdapat empat buah limitswitch artinya meja putar akan
berhenti di empat posisi setiap limitswitch tertekan. Pengujian meja putar adalah dengan
memberikan input 0V atau ground karena output PLC berupa output transistor dengan
kontak ground. Pada meja putar hanya ada satu input, itu artinya meja putar hanya akan
berputar searah saja. Data pengujiannya dapat dilihat pada tabel 4.5.
Tabel 4.5 Hasil pengujian input Meja Putar
Pengujian Input Output
31
4.2.4
Pengujian Katup Motor
Karena merupakan bagian unit output maka pengujiannya adalah dengan cara
memberikan input pada driver motor DC yg digunakan sebagai penggerak katup. Inputan
adalah berupa ground karena pada PLC yang digunakan mempunyai output jenis transistor.
Karena motor sebagai penggerak katup ini harus berputar dalam dua arah maka
memerlukan dua inputan pada rangkaian pembalik putaran. Data hasil pengujian dapat
dilihat pada tabel 4.6.
Tabel 4.6 Hasil pengujian input Motor Katup
Pengujian Input Output
(putaran)
I II
Motor DC
Penggerak katup
GND Tanpa input searah jarum jam
Tanpa input GND berlawanan arah
jarum jam
GND GND Kondisi race
Dari pengujian yang dilakukan katup bekerja dengan baik, tidak terjadi kebocoran pada
saat katup menutup dan aliran serbuk lancar ketika katup membuka. Pada pengujian
digunakan serbuk kristal yang digunakan sebagai pelicin pada permainan karambol. Pada
pengujian sebelumnya dicoba menggunakan serbuk bedak namun aliran serbuk kurang
baik. Aliran tidak lancar saat pengujian dengan serbuk bedak diakibatkan karena serbuk
yang terlalu lembut sehingga banyak menempel pada dinding tampungan dan seperti
menggumpal sehingga tidak bisa mengalir.
4.2.5
Pengujian Pengkondisi Sinyal Output
Loadcell
dan Beban
Maksimum
Pengujian dilakukan dengan mengukur tegangan output dari loadcell dan output
pengkondisi sinyal yaitu rangkaian penguatnya. Pengukuran itu menggunakan contoh
beberapa beban sekaligus untuk melihat tingkat linear output. Hasil pengujian tegangan
32
Tabel 4.7 Hasil pengujian output rangkaian penguat
Beban
(gram)
Output
loadcell (mV)
Output penguat
(mV)
Rata-rata output
(mV)
Output tanpa offset
(mV)
Tanpa beban 0,20 23 s/d 46 34,5(offset) 0
10,2 0,23 512 s/d 524 518 483,5
20,4 0,26 986 s/d 998 992 957,5
30,6 0,29 1546 s/d 1551 1548,5 1514
40,8 0,32 2219 s/d 2241 2230 2195,5
51 0,35 2822 s/d 2834 2828 2793,5
99,2 0,47 5481 s/d 5504 5492,5 5458
150,1 0,65 8207 s/d 8223 8215 8180,5
160,5 0,69 8521 (Saturasi)
Dari data pengujian tabel 4.7 beban maksimal yang masih dapat dibaca adalah 150,1 gram,
penulis mencoba dengan beban 160,5 gram dan hasilnya output rangkaian penguat adalah
saturasi. Perubahan rangkaian penguat pada implementasi dengan perancangan adalah pada
penguatan (Gain). Perbandingannya dapat dilihat pada tabel 4.8.
Tabel 4.8 Perbandingan hasil rangkaian penguat dengan perancangan.
Beban
( gram )
Output
loadcell
( mV )
Gain Perancangan 10000 Gain Maksimal Hasil implementasi 14534,91
Perbandingan Hasil perhitungan
Perancangan (mV) Hasil Pengujian (mV) Tanpa beban
0,20 2000
(offset)
2906,98
(offset)
Tanpa offset Tanpa offset
10,2 0,23 2300 3343,03 300 483,5
20,4 0,26 2600 3779,08 600 957,5
30,6 0,29 2900 4215,12 900 1514
40,8 0,32 3200 4651,17 1200 2195,5
51 0,35 3500 5087,22 1500 2793,5
33
Pada pengujian loadcell menggunakan sumber tegangan 5V. Perubahan yang terjadi adalah
pada rentang tegangan output, pada perancangan adalah 0V s/d 5V kemudian pada
implementasinya rentang outputnya adalah dari 0V sampai dengan tegangan saturasi IC
OP-AMP OP-07 dengan sumber tegangan baterai 9V yaitu 8,5V sesuai datasheet.
Pengukuran linearitas digunakan grafik dan dihitung persamaan beban terhadap
output dan bisa langsung dilihat koefisien korelasi yang menunjukkan linearitas output
loadcell. Grafiknya dapat dilihat pada gambar 4.14.
Gambar 4.14 Grafik linearitas output loadcell dan penguatnya
Dari gambar 4.14 dapat dilihat dua hasil yaitu persamaan garis data pengujian dan nilai
koefisien korelasi. Semua data input grafik mengacu pada tabel pengujian output penguat
pada tabel 4.7. Persamaan yang dihasilkan pada gambar grafik 4.14 adalah seperti pada
persamaan 4.3.
Y = 54,221 X - 15,109 ...(4.3)
0; 34,5 10,2; 518 20,4; 992 30,6; 1548,5 40,8; 2230 51; 2828 99,2; 5492,5
150,1; 8215160,5; 8521 y = 54,221x - 15,109
R² = 0,999
-1000 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
0 50 100 150 200
O ut put P e ng ua t (m V ) Beban (gram)
Data Pengujian
Data Pengujian34
Sumbu Y adalah output tegangan rangkaian penguat dan sumbu X adalah beban.
Kemudian nilai koefisien korelasi adalah 0,999 atau kalau diubah menjadi persen menjadi
99,9%.
Selain pengujian output dan linearitas dilakukan juga pengujian dan perhitungan
mengenai ketelitian loadcell dan penguat sebagai timbangan. Untuk melihat ketelitian
loadcell bisa dilihat pada tabel 3.1, dari tabel tersebut tercatat kenaikan pada output
loadcell setiap 10,2 gram rata-rata adalah sebesar 0,03 mV. Dengan alat ukur yang
digunakan penulis yang mempunyai ketelitian maksimum 0,01 mV, maka tingkat
sensitifitas loadcell hanya sebesar 10,2/3 yaitu 3,4 gram atau 0,01 mV tiap 3,4 gram.
Dengan begitu alat ukur sudah tidak bisa membaca kenaikan beban dibawah 3,4 gram.
Hasil pengujian dari output penguatnya dapat dilhat pada tabel 4.9.
Tabel 4.9 Data pengujian ketelitian dengan beban kecil
Beban (mg) Output penguat (mV) Rata-rata output (mV) Kenaikan output (mV)
Tanpa beban 34 s/d 78 56,0 Tidak ada
251 37 s/d 76 56,5 0,5
521 36 s/d 79 57,5 1,5
761 37 s/d 80 58,5 2,5
1052 78 s/d 119 98,5 42,5
2580 153 s/d 197 175,0 119,0
Dari pengujian tabel 4.9 dapat dilihat pada beban 571 mg s/d 761 mg output penguat tidak
mengalami perubahan yang berarti dan lebih dikarenakan pengaruh dari osilasi. Jika
melihat pada tabel 2.2 maka resolusi input MAD01 hanya sebesar 1/256 dari tegangan
maksimum penguat (saturasi) yaitu seperti tabel 4.7 sebesar 8521 mV. Perhitungannya
resolusi input MAD01 adalah 8521/256 yaitu sebesar 33,28 mV. Dengan begitu MAD01
akan membaca kenaikan input setiap 33,28 mV dan itu berarti jika melihat hasil pada tabel
4.9 maka timbangan tidak berhasil mencapai ketelitian miligram.
Pengujian juga dilakukan pada saat penakaran, pengujian ini adalah untuk
35
menggunakan serbuk kristal yang digunakan pada permainan karambol. Pengujian
dilakukan dengan pedoman output dari rangkaian penguat loadcell karena komunikasi
Visualbasic dengan PLC gagal. Data pengujiannya dapat dilihat pada tabel 4.10.
Tabel 4.10 Data pengujian keseragaman takaran
Berat total beban
( gram ) Jumlah
pembagian
Berat tiap bagian
secara teori
( gram )
Hasil pembagian
( gram )
Galat
Keseragaman
(%)
20,04 2 10,02 1. 9,44
2. 10,28 8,17
50,21 3 16,73 1. 16.24
2. 16,26
3. 16,80
3,33
Pada pengujian penakaran hasilnya tidak akurat, hampir setiap bagian punya berat yang
berbeda. Berat total hasil tidak sama dengan berat total sebelum ditakar, selalu ada
pengurangan. Hal ini terjadi karena ada serbuk yang tersisa karena melekat pada dinding
36
BAB V
KESIMPULAN DAN SARAN
5.1
Kesimpulan
Dari hasil implementasi dan analisa sistem takar obat serbuk yang digunakan
sebagai sistem konstruksi hardware dan timbangan ini dapat disimpulkan beberapa hal,
diantaranya adalah:
1. Loadcell dan rangkaian penguat sebagai timbangan sudah bekerja, walaupun tidak
sesuai dengan perancangan.
2. Semua output sensor seperti sensor LDR, sensor infrared dan juga limitswitch tidak
sesuai dengan perancangan yang seharusnya 12V. Outputnya sekitar 10,50V dan
masih bekerja dengan baik sebagai input PLC.
3. Mekanisme lain seperti meja putar dan kotak penyimpanan berfungsi sesuai
perancangan dengan beberapa perubahan.
4. Tampungan obat dan katup motor sudah berfungsi walaupun tidak sempurna, hal
itu terjadi bila sebuk terlalu lembut karena banyak yang melekat pada dinding
tampungan dan menyebabkan macet. Pada pengujian dengan serbuk kristal
tampungan beserta katup bekerja dengan baik.
5.2
Saran
Dari hasil penelitian banyak sekali bagian yang perlu perbaikan dan
pengembangan lebih lanjut. Sedikit saran dari penulis yang mungkin berguna untuk
pengembangan alat ini selanjutnya, yaitu:
1. Gunakan loadcell yang lebih teliti dan sensitif.
2. Penelitian lanjutan untuk rangkaian pengkondisi sinyal dan osilasi.
3. Sistem timbangan dibuat lebih bagus dan presisi, juga membuat penutup pada
bagian timbangan khususnya loadcell untuk menghindari pengaruh beban dari luar
seperti hembusan angin atau semacamnya.
37
DAFTAR PUSTAKA
[1] Sugijanto, Lulut. 2009. Uji Keseragaman Bobot dan Keseragaman Kadar Sediaan
Pulveres yang Dibuat Apotek di Yogyakarta,
http://sehat-bugar.blogspot.com/2009/02/sehat-digest-number-9663.html
[2]
, diakses
tanggal 30 Maret 2009.
http://atmelmikrokontroler.wordpress.com/2009/06/25/komparator-tegangan
[3] Operational Amplifier,
, diakses
tanggal 17 Desember.
http://electroniclab.com/index.php?option=com_content&view=article&id=18:op-amp-bagian-ke-dua&catid=7:labanalog&Itemid=8,
[4] Loadcell.
diakses tanggal 11 Desember 2009.
http://electricomatic.com/?p=17
[5] Konfigurasi LM741.
, diakses tanggal 11 Desember 2009.
[6] Sudarsono, Arief. 2000. Studi Sifat Mampu Alir Pasir Kuarsa di Dalam Bin. JTM 7:3. http://digilib.petra.ac.id, diakses tanggal 12 Desember 2009.
http://www.fttm.itb.ac.id/jtm/index.php?content=journal&id=98&lang=in,
[7] DC power window motor.
diakses
tanggal 26Maret 2009.
http://images.google.co.id/imgres?imgurl=http://i600.photobucket.com/albums/tt82/ele
ctroboter/Power-Window-Motor-HT420-1-.jpg&imgrefurl,
[8]
diakses tanggal 15
Desember 2009
http://pentriloquist.wordpress.com/2009/01/09/membuat-robot-line-follower-sederhana/#blogkonten1
[9]
, diakses tanggal 16 Desember 2009.
http://www.elektro.undip.ac.id/sumardi/www/komponen/7_4.htm ,
[10]
diakses tanggal 17
Desember 2009.
http://www.omron.com.au/produk_info
[11]
, diakses tanggal 11 Desember 2009.
http://www.clark-garage.com/grafik/sunruf-late-limit-switch.jpg
[12]
, diakses tanggal 12
Desember 2009.
http://www.elektro.undip.ac.id/sumardi/www/komponen/bab2non.pdf, diakses tanggal
38
Gambar Hasil implementasi alat
Gambar Hasil pengkabelan port input dan output
Tabel pengambilan data sensor
Pengujian Tegangan output ( volt )
Tidak ada gelas takar Ada gelas takar
Sensor LDR I 0 10,36
Sensor LDR II 0 10,41
Sensor LDR III 0 10,40
Infrared 0 10,50
Tidak ditekan Ditekan
Limitswitch 10,53 0
Tabel pengambilan data output motor
Pengujian Input Output
I II
Motor DC
Penggerak katup
GND Tanpa input Motor berputar
searah jarum jam
Tanpa input GND Motor berputar
berlawanan arah
jarum jam
GND GND Kondisi race
Meja putar GND
Berputar berlawanan
Tabel pengambilan data output timbangan
Beban
(gram)
Output
loadcell (mV)
Output penguat
(mV)
Rata-rata output
(mV)
Output tanpa offset
(mV)
Tanpa beban 0,20 23 s/d 46 34,5(offset) 0
10,2 0,23 512 s/d 524 518 483,5
20,4 0,26 986 s/d 998 992 957,5
30,6 0,29 1546 s/d 1551 1548,5 1514
40,8 0,32 2219 s/d 2241 2230 2195,5
51 0,35 2822 s/d 2834 2828 2793,5
99,2 0,47 5481 s/d 5504 5492,5 5458
150,1 0,65 8207 s/d 8223 8215 8180,5
160,5 0,69 8521 (Saturasi)
Tabel hasil pengujian dengan beban kecil
Beban (mg) Output penguat (mV) Rata-rata output (mV) Kenaikan output (mV)
Tanpa beban 34 s/d 78 56,0 Tidak ada
251 37 s/d 76 56,5 0,5
521 36 s/d 79 57,5 1,5
761 37 s/d 80 58,5 2,5
1052 78 s/d 119 98,5 42,5

![Gambar 2.6 Konfigurasi Kaki-kaki Limit Switch [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1693614.2078454/24.595.220.391.620.711/gambar-konfigurasi-kaki-kaki-limit-switch.webp)