i
MIKROKONTROLER AVR
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
oleh :
Agustinus Robby Sulistiawan
NIM : 025114045
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
TECHNOLOGY
Presented as Partial Fullfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By :
Agustinus Robby Sulistiawan
Student Number : 025114045
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
v
tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 29 November 2007
Penulis
vi
Dengan tulus hati penulis mempersembahkan Tugas Akhir ini kepada :
Alm.Papa Ngadiran, Mama samini, kakakku Asmarani,
Joko dan Adikku Ardhina tercinta
,
yang dengan setia mendoakan, memperhatikan, membimbing, mengasihi
dan menyayangiku.
Yohana Erika Pratama
yang dengan setia memberi spirit, perhatian dan kasih sayang.
Sahabat-sahabatku Teknik Elektro 2002
Yang selalu mendukung, memberi semangat serta masukkan
Konco-konco qu kost Patria
yang selalu mendukung dan memberi semangat.
Almamaterku
vii
“Segala perkara dapat ku tanggung didalam DIA yang memberi
kekuatan kepadaku” (Filipi 4:13)
Sukses berasal dari ”AKU BISA” gagal berasal dari ”AKUTIDAK
BISA”
viii
Berkembangnya bidang elektronika sekarang, membuat pengendalian terhadap alat-alat elektronika dapat dilakukan dengan berbagai macam cara. Teknologi RS-485 merupakan salah satu sistem komunikasi yang dapat digunakan dalam sistem pengendalian. Dimana dengan teknologi ini dapat menghubungkan 32 unit peralatan elektronika dengan menggunakan dua kabel saja.
Dengan memanfaatkan teknologi RS-485 maka dibuat suatu alat untuk mengendalikan lampu dari jarak jauh. Pengendalian menggunakan sebuah keypad
untuk menentukan kondisi lampu. Masukan data tersebut kemudian diolah oleh
control unit. Pada bagian ini terdapat 3 buah mikrokontroler ATMega8535 sebagai pusat pengendali. Sebuah mikrokontroler master berfungsi untuk menampilkan pada LCD lampu ke berapa yang ingin dikendalikan. Dan dua buah mikrokontroler slave berfungsi untuk mengolah data masukan dari keypad.
Tranmisi data antara mikrokontroler master dengan mikrokontroler slave
menggunakan sistem komunikasi serial RS-485.
Alat pengendali lampu ini sudah dicoba dan terbukti dapat bekerja dengan baik. Keadaan kondisi lampu sudah sesuai dengan masukan dari keypad.
Kata kunci : Pengendali lampu, aplikasi mikrokontroler ATMega8535, sistem komunikasi serial RS-485.
ix
controlling electronic apparatus. RS-485 technology is one of the communication system used in the control system. This technology can link 32 electronic apparatus with just two cable line.
By using the RS-485 technology we can construct a remote control for lamp. The control is using a keypad to determine the lamp condition. And then the input data is processed by the control unit. The unit consists of 3 ATMega8535 microcontrollers as the control central. A microcontroller master function is to display on the LCD which lamp to control. The other two microcontrollers function as a slave, the unit processed the input data from the keypad. The transmission data between the microcontroller master and the microcontroller slave is using the RS-485 serial communication system.
The lamp remote control has been tested and proved to work effectively. The lamp condition is the same with the input data from the keypad
Key word: The lamp remote control, ATMega8535 microcontroller application, RS-485 serial communication system.
x
Puji syukur penulis panjatkan kepada Tuhan Yesus Kristus atas segala kasih karunia, anugerah, dan berkat-Nya, sehingga penulis dapat menyelesaikan penulisan tugas akhir ini dengan baik.
Penulis menyadari bahwa dalam penulisan tugas akhir ini, penulis mendapatkan banyak bantuan dan dorongan dari berbagai pihak. Oleh karena itu, pada kesempatan ini dengan segala kerendahan hati dan penuh hormat, penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC Selaku Dekan Fakultas Teknik Universitas Sanata Dharma Yogyakarta.
2. Bapak A. Bayu Primawan, S.T., M.Eng selaku Ketua Jurusan Teknik Elektro Universitas Sanata Dharma Yogyakarta
3. Bapak B. DjokoUntoro, S.Si., M.T. selaku pembimbing atas segala pemikiran, waktu dan tenaganya dalam membimbing dan mengarahkan penulis dari awal hingga akhir.
4. Seluruh dosen di Fakultas Teknik Elektro yang tidak dapat di sebutkan satu persatu, yang telah mendidik dan membimbing penulis dalam memperdalam dunia Teknik Elektronika.
xi
7. Kakakku Asmarani, Joko dan adikku Ardhina yang telah memberi doa dan pengharapan dalam menyelesaikan tugas akhir ini.
8. Kekasihku Rika yang memberi dukungan doa, semangat, waktu, cinta kasihnya dan kesabarannya.
9. My Big Family Padepokan Pomahan : Mas Gede, Mbak Nyoman, Putu, Mas Alex, Mas Bowo, Kang Ucup dan Kang Jum.
10. Konco-konco qu PATRIA: Andis, Angga, Leo, Yosef, Gompiz, Dadit n Tata, Ridho, Beni, Broto, Dedek, Kura2, Willy, Seul, Dedi n Anna, Ido, Summing, Ade, Bintoro, Dimas. Ayo sukseskan tradisi Patria KONCO.
11. Konco-konco qu teknik Elekro yang sudah membantu : Andis (thx dis bantuannya), Briatma, Iyok, Lele, Dhani, Deri, Andex, Bhule, Andreas PK, Tikus, Hari, Clement, Plentonx, Gepeng, Alex, Eric, Spadic, Koten, Pandu, Dhika, Ari, Rina, Ido, Denny, Sinung. semangat konco...!!
12. Konco-konco qu : Wisnu, Victor, Edit, Ranti. Mari kita berjuang jadi orang yang susses.
xii
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari penulisan tugas akhir ini. Oleh karena itu segala kritik dan saran yang bersifat membangun sangat penulis harapkan.
Akhir kata penulis berharap agar skripsi ini dapat bermanfaat bagi penulis maupun pembaca semuanya.
Yogyakarta, November 2007
xiii
HALAMAN PERSETUJUAN………..III HALAMAN PENGESAHAN... IV HALAMAN PERNYATAAN KEASLIAN KARYA……….V HALAMAN PERSEMBAHAN ………...VI HALAMAN MOTTO...VII INTISARI...VIII ABSTRACT...IX KATA PENGANTAR...X DAFTAR ISI...XIII DAFTAR GAMBAR...XVI DAFTAR TABEL...XIX BAB 1 PENDAHULUAN
1.1 Judul...1
1.2 Latar Belakang...1
1.3 Tujuan Penulisan...2
1.4 Manfaat Penulisan...2
1.5 Perumusan Masalah...2
1.6 Batasan Masalah...3
1.7 Metologi Penelitian...3
1.8 Sistematika Penulisan...4
BAB II. DASAR TEORI 2.1 Mikrokontroler AVR...5
2.2 Mikrokontroler AVR ATMega8535...6
2.2.1 Arsitekture Mikrokontroler AVR ATMega85365...6
2.2.2 Fitur ATMega8535...7
2.2.3 Konfigurasi Pin ATMega8535...8
2.2.4 Peta Memori...10
xiv
2.4 Sistem RS 485……….……….17
2.4.1 Pengaturan Impedansi Terminal……….………...19
2.4.2 Pemberian Prasikap Pada Jaringan RS 485...20
2.4.3 Pengaman Jaringan RS 485 Terhadap Beda Potensial Listrik...22
2.5 Relay...26
BAB III. PERANCANGAN ALAT 3.1 Diagram Blok...27
3.2 Perancangan perangkat keras...27
3.2.1 Minimum sistem mikrokontroler AVR...27
3.2.1.1 Mikrokontroler AVR ATMega8535...30
3.2.2 IC Komunikasi Serial RS 485...31
3.2.2.1 Konfigurasi Jaringan...32
3.2.2.2 Komponen Penyesuai Impedansi...33
3.2.2.3 Pemberian Prasikap pada jaringan...33
3.2.2.4 Pengamanan Beda Potensial Untuk Jaringan...36
3.2.3 Rangkaian Driver Lampu...37
3.2.4 Rangkaian Keypad...38
3.3 Perancangan perangkat lunak...39
3.3.1 Program Utama Master...39
3.3.2 Program Utama Slave...40
3.3.3 Program aktfkan LCD...41
3.3.4 Program Periksa Jalur... 42
3.3.5 Program Kirim Data...43
3.3.6 Program Baca Data Keypad...44
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN 4.1 Cara Penggunaan Pengendali Lampu Jarak Jauh...48
4.2 Pengujian dengan perintah...49
xv
4.3.4 Pengamatan Rangkaian Driver...53
4.3.5 Transmisi Data Serial...54
4.4 Pengaruh data kabel terhadap sinyal data...57
4.5 Koneksi kabel...58
BAB V. KESIMPULAN DAN SARAN 5.1 KESIMPULAN...60
5.2 SARAN...60
DAFTAR PUSTAKA LAMPIRAN
xvi
Gambar 2.1 Tampilan Pin ATMega8535 ... 8
Gambar 2.2 Memori Data dan Memori Program AVR ATMega8535 ... 11
Gambar 2.3 Status Register ATMega8535 ... 12
Gambar 2.4 Rangkaian reset eksternal ... 13
Gambar 2.5 Rangkaian Osilator ... 14
Gambar 2.6 Konstruksi dan cara kerja LCD ... 15
Gambar 2.7 Bentuk dan bagian LCD 16 x 2 ... 16
Gambar 2.7 Sinyal keluaran dari pemancar (driver)... 18
Gambar 2.8 Sinyal masukan untuk penerima (receiver). ... 18
Gambar 2.9 (a) Rangkaian Parallel Termination ... 20
Gambar 2.9 (b) Rangkaian AC-Coupled Termination ... 20
Gambar 2.10 Transceiver dengan resitor prasikap ... 21
Gambar 2.11 Pemisahan ground dengan isolasi optik ... 23
Gambar 2.12 Penyambungan ground data dan ground local dengan koneksi Resistor ... 24
Gambar 2.13 Sistem proteksi shunting device dengan menggunakan dioda zener ... 25
Gambar 2.14 Sistem proteksi shunting device dengan menggunakan dioda zener dan fuse seri ... 25
xvii
Gambar 3.4 ATMega8535 ... 31
Gambar 3.5 IC SN75176 ... 31
Gambar 3.6 Rangkaian RS-485 dengan konfigurasi multidrop 2 kabel ... 32
Gambar 3.7 Komponen penyesuai impedansi ... 33
Gambar 3.8 Rangkaian sistem komunikasi RS 485 ... 36
Gambar 3.9 Rangkaian pengaman dengan metode shunting device ... 37
Gambar 3.10 Rangkaian Driver Lampu ... 38
Gambar 3.11 Rangkaian keypad 3X4 ... 39
Gambar 3.12 Diagram alir program utama master ... 40
Gambar 3.13 Diagram alir program utama slave ... 41
Gambar 3.14 Diagram alir aktifkan LCD ... 42
Gambar 3.15 Diagram alir program periksa jalur ... 43
Gambar 3.16 Diagram alir program pengiriman data ... 44
Gambar 3.17 Diagram alir baca data keypad ... 45
Gambar 4.1 Alat pengendali lampu jarak jauh dengan teknologi RS-485... 46
Gambar 4.2 Rangkaian Master ... 47
Gambar 4.3 Rangkaian Slave ... 48
Gambar 4.4 Hasil pengamatan sinyal pada line B serial RS-485 ... 55
Gambar 4.5 Hasil pengamatan sinyal pada line A serial RS-485 ... 56
xviii
xix
Tabel 2.1 Pin tampilan LCD ... 16
Tabel 4.1 Kondisi lampu dengan perintah ... 50
Tabel 4.2 Hasil pengukuran catu daya ... 51
BAB I
PENDAHULUAN
1.1 Judul
Sistem Pengendali Lampu dengan teknologi RS 485 berbasis mikrokontroler AVR.
1.2 Latar Belakang
Sistem Penerangan bukanlah hal yang aneh lagi buat masyarakat kita. Bahkan banyak yang bergantung pada penerangan. Untuk penerangan sekarang kebanyakan orang menggunakan lampu. Tetapi terdapat sebuah permasalahan saat semakin banyak tempat yang ingin diterangi sehingga terdapat banyak pula lampu yang digunakan.
1.3 Tujuan penelitian
Tujuan penelitian ini adalah terwujudnya suatu alat yang dapat mengendalikan kondisi lampu dari jarak jauh melalui sistem komunikasi RS-485.
1.4 Manfaat penelitian
Manfaat dari penulisan Laporan Tugas Akhir ini adalah : 1. Dapat dipergunakan di dalam rumah tangga, ataupun di perhotelan
untuk mengendalikan lampu dengan penggunaan kabel yang minimal. 2. Dapat menambah literatur(pustaka) tentang teknologi RS-485
menggunakan mikrokontroler seri ATMega8535 sebagai pengendali jarak jauh.
1.5 Perumusan Masalah
Permasalahan yang dapat dirumuskan pada pembuatan alat ini adalah sebagai berikut:
1. Bagaimana mengendalikan lampu dari jauh menggunakan mikrokontroler dan komunikasi RS 485?
2. Apakah sistem yang dirancang dapat bekerja dengan baik?
1.6 Batasan Masalah
Agar permasalahan yang ada tidak berkembang menjadi luas, maka perlu adanya batasan terhadap permasalahan yang akan dibuat yaitu: 1. Pengendalian lampu menggunakan 2 buah lampu.
2. Lampu yang digunakan ialah AC, 220V/5W
3. Unit masukan menggunakan tombol keypad.
4. Unit keluaran dinyatakan dengan kondisi lampu. 5. Unit komunikasi menggunakan RS 485.
6. Unit kendali menggunakan AVR dengan bahasa pemrograman assembly
1.7 Metodologi Penelitian
Metodologi yang digunakan untuk menyelesaikan permasalahan dalam pembuatan alat yaitu:
1. Mengumpulkan referensi dan literatur dari perpustakaan dan internet. 2. Menyusun referensi dan literatur yang ada dengan berkonsultasi
dengan dosen pembimbing.
3. Perancangan alat yang terkonsep meliputi perancangan perangkat lunak dan perangkat keras.
4. Pembuatan alat berdasarkan pada hasil perancangan. 5. Pengujian alat dan pengambilan data.
7. Penyusunan laporan.
1.8 Sistematika Penulisan
BAB I PENDAHULUAN
Berisi judul, latar belakang, tujuan penulisan, manfaat penulisan, perumusan masalah, batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II DASAR TEORI
Berisi dasar teori mengenai mikrokontroler AVR, LCD(Liquid Cristal Display), dan sistem RS 485.
BAB III PERANCANGAN
Beris perancangan perangkat keras (hardware) dan perancangan perangkat lunak (software) sebelum alat dibuat.
BAB IV PEMBAHASAN
Berisi bahasan tentang hasil pengujian alat dan analisa dari data hasil pengujian.
BAB V KESIMPULAN DAN SARAN
BAB II
DASAR TEORI
2.1 Mikrokontroler AVR
Bagian ini akan menjabarkan Mikrokontroler AVR yang merupakan inti rangkaian yang dibangun. Beberapa bagian yang akan dibahas diantaranya yaitu mengenai arsitektur mikrokontroler, instruksi, mode pengalamatan memory dan program, serta periferal-periferal pendukung yang terdapat dalam mikrokontroler AVR .
Mikrokontroler adalah salah satu dari bagian dasar dari suatu sistem komputer. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan output spesifik berdasarkan input yang diterima dan program yang dikerjakan.
Selain itu mikrokontroler merupakan alat yang mengerjakan instruksi-instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh
Vegard’s Risc processor), mikrokontroler ini telah memiliki kapabilitas yang amat maju, tetapi dengan biaya ekonomis yang cukup minimal.
2.2 Mikrokontroler AVR ATmega8535
2.2.1 Arsitektur Mikrokontroler AVR ATmega8535
Mikrokontroler AVR ATmega8535 merupakan mikrokontroler CMOS dengan daya rendah yang memiliki arsitektur AVR RISC (Reduced Instruction Set Computer) 8 bit, di mana semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Ini karena dalam MCS51 menggunakan CISC (Complex Instruction Set Computing). Arsitektur ini mendukung kemampuan untuk melaksanakan eksekusi dalam satu siklus clock
osilator. AVR memiliki fitur untuk menghemat konsumsi daya yaitu dengan mode sleep. Mode sleep dalam mikrokontroler AVR ada dua macam yaitu mode idle dan modepower-down .
Mikrokontroler AVR memiliki model arsitektur Harvard di mana memori dan bus untuk program dan data dipisahkan. Dalam arsitektur AVR ini, 32 register umum terhubung langsung ke ALU
processor. Hal ini yang membuat AVR memiliki kecepatan tinggi dalam mengeksekusi instruksi.
during execution atau memegang sambil mengerjakan. Hal ini berarti, dua operan dibaca dari dua register, dilakukan eksekusi operasi dan hasilnya disimpan kembali dalam satu register. Proses ini dilakukan dalam satu siklus clock.
Mikrokontroler ATmega8535 ini merupakan mikrokontroler 8 bit keluarga AVR yang memiliki beberapa fasilitas seperti :
1. Saluran I/O sebanyak 32 buah yaitu Port A, Port B, Port C dan Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8Kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
2.2.2 Fitur ATmega8535
Kapabilitas detail ATmega8535 adalah sebagai berikut:
2
2. K E se
3. A 4. P
M 5. E
2.2.3 Kon
Gam ATm
Dari a. V b. A
Kapabilitas EEPROM (E
ebesar 512b ADC interna
Portal komun Mbps. Enam pilihan
figurasi Pin
mbar 2.1 ber mega8535
Gam
tampilan pin VCC : M AVCC : M
memori fla
Electrically
byte.
l dengan fid
nikasi seria
n mode sleep
n ATMega85
rikut ini me
mbar 2.1 Ta
n seperti dia Merupakan p Merupakan p
ash I8 KB,
Erasable P
delitas 10 bit al (USART)
p menghema
536
enunjukkan
ampilan Pin
atas dapat dij pin masukan pin masukan
, SRAM se
Programable
sebanyak 8 dengan kec
at penggunaa
tampilan p
ATmega853
jelaskan seba n tegangan se n tegangan A
ebesar 512
Read Only
channel.
cepatan mak
an daya listri
pin-pin mikr
35
agai berikut ebesar 5 volt ADC
byte dan
c. AREF : Merupakan pin masukan tegangan referensi ADC.
d. Reset : Merupakan pin reset, mikrokontroler akan merset program jika pin ini berlogika low selama 50ns.
e. GND : Merupakan pin ground
f. Port A : Merupakan pin I/O dua arah kelompok 8-bit bi-directional I/O Port (PA0 – PA7). Pada port ini juga berfungsi sebagai 8 bit channel ADC (ADC0 – ADC7).
g. Port B : Merupakan pin I/O dua arah kelompok 8-bit bi-directional
I/O Port (PB0 – PB7). Port B memiliki beberapa fungsi khusus yaitu T0 untuk input Timer dan T1 untuk input
counter, AIN0 dan AIN1 untuk input analog comparator. SS, MOSI, MISO, SCK untuk komunikasi serial SPI h. Port C : Merupakan pin I/O dua arah kelompok 8-bit bi-directional
I/O Port (PC0 – PC7). Port C memiliki beberapa fungsi khusus yaitu TOSC1,TOSC2, OC2 untuk input Timer Oscilator dan input komunikasi serial I2C yaitu SDA dan SCL.
i. Port D : Merupakan pin I/O dua arah kelompok 8-bit bi-directional I/O Port (PD0 – PD7). Port D memiliki beberapa fungsi khusus yaitu input interupsi eksternal (INTO dan INT1), komunikasi serial USART (TXD dan RXD) dan OC1B, OC1A, ICP1.
k. X-TAL2 : Merupakan output dari inverting osilator
2.4.1 Peta Memori
AVR ATmega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data yang terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte
SRAM Internal.
Register keperluan umum menempati space data pada alamat terbawah, yaitu $00 sampai $1F. Sementara itu, register khusus untuk menangani I/O dan kontrol terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai periferal mikrokontroler, seperti kontrol register,
Gambar 2.2 Memori Data dan Memori Program AVR ATmega8535
Memori program yang terletak dalam Flash PEROM tersusun dalam word atau 2 byte karena setiap instruksi memiliki lebar 16-bit atau 32-bit. AVR ATmega8535 memiliki 4KbyteX16-bit Flash PEROM
dengan alamat muai dari $000 sampai $FFF tersebut memiliki 12-bit
Program Counter (PC) sehingga mampu mengalamati Flash.
Selain itu AVR ATmega8535 juga memiliki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dumulai dari $000 sampai $1FF.
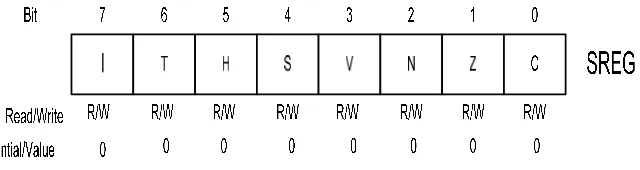
2.4.2 Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi di eksekusi. SREG merupakan bagian dari inti CPU mikrokontroler. Status Register ditunjukkan pada gambar 2.3
Gambar 2.3 Status Register ATmega8535
Mikrokontroler ATmega8535 memiliki 130 macam instruksi. Instruksi-instruksi mikrokontroler AVR dapat dibagi sebagai berikut : a. Instruksi transfer data, instruksi ini berfungsi untuk transfer data antara
register keregister, memori ke memori, register ke memori, antarmuka ke register, dan antarmuka ke memori.
b. Instruksi aritmatika dan logic, instruksi aritmatika meliputi penjumlahan, pengurangan, penambahan satu (increament), dan pengurangan satu (decreament). Instruksi logika dan manipulasi bit, yang melaksanakan operasi AND, OR, XOR, perbandingan, penggeseran, dan komplemen data.
c. Instruksi Bit dan Bit-Test, yaitu instruksi untuk setting kondisi tiap bit, baik set maupun clear, bahkan ada beberapa variasi, seperti instruksi putar, hingga watchdog reset.
d. Instruksi percabangan, yang berfungsi mengubah urutan normal pelaksanaan suatu program menjadi sesuai yang dikehendaki. Dengan instruksi ini program yang sedang dilaksanakan akan mencabang ke suatu alamat tertentu. Instruksi percabangan dibedakan atas percabangan bersyarat dan percabangan tanpa syarat.
e. Instruksi stack, I/O dan kontrol, yang digunakan untuk mengatur penggunaan stack, membaca/menulis port I/O serta pengontrolan-pengontrolan.
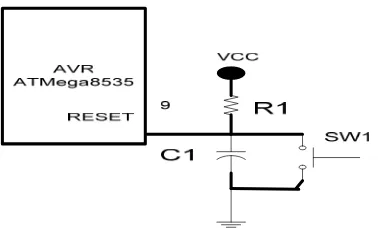
a. Reset Eksternal
Keadaan reset terjadi apabila pin reset mendapat logika 0 selama lebih dari 50ns. Pin reset dihubungkan dengan resistor yang terhubung ke VCC, kapasitor, dan ground. Rangkaian reset eksternal ditunjukkan pada gambar 2.4.
Gambar 2.4 Rangkaian reset eksternal.
Penentuan reset eksternal dapat dilakukan dengan mengatur nilai resistor dan kapasitornya. Untuk membuat keadaan reset tegangan maksimal yang harus diberikan pada pin ini Vc = 0,85 Vcc (datasheet
AVR ATmega8535 ). Karena (1 RC) t e Vcc Vc − −
= maka dapat dicari nilai C1 dengan :
)
1
(
RC te
Vcc
Vc
−−
=
Setelah ditentukan resistor yang digunakan, maka kapasitornya dapat dicari dengan : RC=0,5271×10−3
b. Osilator
dengan keluarga mikrokontroler MCS-51. AVR ATmega8535 membutuhkan waktu satu siklus clock untuk melakukan eksekusi terhadap suatu instruksi. rangkaian osilator ditunjukkan pada gambar 2.5.
Gambar 2.5 Rangkaian Osilator
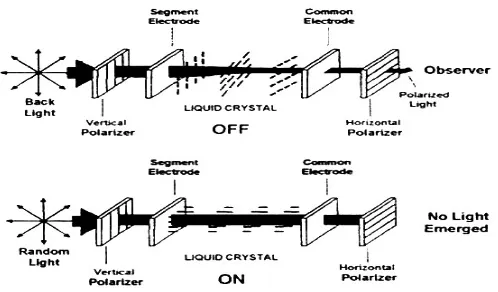
2.3 LCD (Liquid Crystal Display)
Gambar 2.6 Konstruksi dan cara kerja LCD
Kaca bagian belakang mempolarisasi cahaya secara vertikal, sedang kaca bagian depan mempolarisasi cahaya secara horisontal. Ketika tidak terdapat medan listrik di antara kedua elektroda, kristal cair membentuk pola-pola yang acak, sehingga cahaya yang sudah terpolarisasi vertikal dapat berputar dan menembus kaca bagian depan yang terpolarisasi horisontal. Namun ketika suatu medan listrik diberikan di antara kedua elektroda, kristal cair akan membentuk pola yang seragam dan tidak ada cahaya yang diputar, sehingga tidak ada cahaya yang menembus kaca bagian depan. Dengan susunan dan bentuk pola elektroda
tertentu dapat dihasilkan huruf atau gambar yang akan ditampilkan.
Elektroda-elektroda yang tersusun pembentuk karakter atau gambar dihubungkan pada suatu pengendali. Untuk mengurangi banyaknya koneksi, pengendali menggerakkan elektroda-elektroda secara
multipeks. Namun dengan sistem multipleks mudah terjadi crosstalk.
Level-level tegangan digunakan untuk membagi tegangan catu ke
elektroda dan membentuk waveform tegangan yang dapat mengurangi terjadinya crosstalk. Selain itu level-level tegangan ini membangkitkan tegangan AC murni yang dapat menghindari rusaknya layar LCD akibat
electrophoresis.
karakter tersebut terbentuk dari susunan dot yang berukuran 8 baris dan 5 kolom dot. Gambar 2.7 merupakan bentuk dan bagian LCD 16x2. Sedangkan Pin pada LCD terdapat pada tabel 2.7.
Tabel 2. 1 Pin tampilan LCD
Nomor Simbol Nomor Simbol
1 VEE (0V) 9 DB2
2 VCC 10 DB3
3 GND 11 DB4
4 RS 12 DB5
5 R/W 13 DB6
6 E 14 DB7
7 DB0 15 A
8 DB1 16 K
2.4 SISTEM RS 485
Sistem RS 485 merupakan standar komunikasi multidrop
dengan menggunakan transmisi berimbang yang terhubung dalam satu jaringan. Dengan kata lain, RS 485 merupakan sistem komunikasi data secara serial yang dipakai untuk komunikasi multipoint seperti jaringan
memakai arsitektur slave dengan setiap slave mempunyai keunikan alamat dan hanya merespon paket-paket yang ditujukan kepada unit ini.
RS 485 tersedia dalam dua versi yaitu satu atau dua twisted pair. RS 485 yang menggunakan satu twisted pair disini semua alat dihubungkan ke twisted pair, jadi semua harus mempunyai driver dengan
tri_state. komunikasi berlangsung satu jalur di kedua arah. Sangat penting mencegah lebih banyak alat dalam satu pengiriman. RS 485 yang menggunakan dua twisted pair disini master harus mempunyai tri-state output karena alat slave mengirimkan melewati twisted pair yang kedua, yang dimaksudkan untuk mengirim data dari slave ke master. Cara ini memungkinkan untuk melaksanakan komunikasi multipoint dalam sistem. Sistem pentransmisian data secara serial dengan standar komunikasi serial RS-485 dikembangkan sejak tahun 1983 dan mampu mentransmisikan data yang cukup jauh yaitu 1,2 km.
Standar komunikasi serial RS-485 dapat diterapkan pada suatu jaringan telepon tunggal (party line) atau pada jaringan multidrop
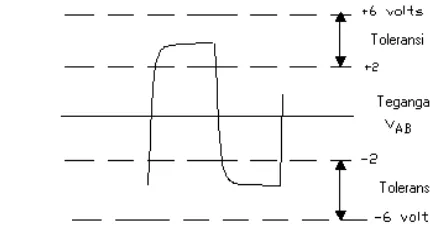
sampai –6 V (sinyal maksimal) yang masih dapat diterima antara terminal A-B seperti ditunjukkan pada Gambar 2.8b.
Gambar 2.8a Sinyal keluaran dari pemancar (driver)
Gambar 2.8b Sinyal masukan untuk penerima (receiver). 2.4.1 Pengaturan Impedansi Terminal
Pengaturan impedansi terminal dapat diabaikan bila delay propagasi saluran data lebih rendah dari lebar satu bit data.
Sebagai contoh sebuah sistem yang menggunakan kabel dengan panjang 600 meter, maka delay propagasi saluran dapat dihitung dengan mengalikan panjang kabel dengan kecepatan laju propagasi yang biasanya sebesar 66% sampai 75 % dari kecepatan cahaya (= 3 x108 m/s). Dengan panjang kabel 600 meter maka perjalanan bolak-balik data 1200 meter dengan laju propagasi 0,66 kecepatan cahaya sehingga delay
propagasi sebesar 6,06μs. Bila perjalanan data sebanyak tiga kali bolak-balik, pemantulan akan melemah maka sinyal akan stabil pada 18,18μs.
Padahal lebar satu bit data untuk 9600 baud adalah 104μs sehingga pada
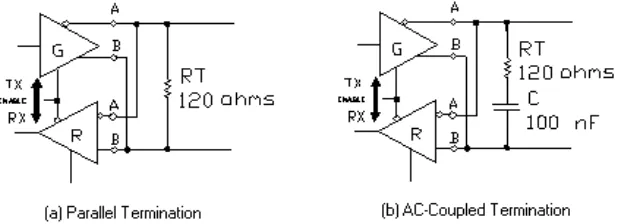
kasus ini pengaturan impedansi terminal dapat diabaikan. Ada dua macam pengaturan impedansi terminal, yaitu:
1. Dengan parallel termination.
Yaitu dengan menambahkan resistor yang dipasang paralel sebagai penyesuai impedansi. Nilai resistor ini pada umumnya sebesar 100 Ω. Nilai ini didapatkan dari nilai impedansi intrinsik kabel penghantar transmisi seperti yang terlihat pada Gambar 2.9a
2. Dengan AC-couple termination.
kecil yang berfungsi untuk menghilangkan efek pembebanan DC seperti yang terlihat pada Gambar 2.9b.
2.4.2 Pemberian Prasikap Pada Jaringan RS-485
Ketika suatu jaringan RS-485 berada dalam keadaan idle
(menunggu), semua driver RS-485 menjadi penerima. Pada keadaan ini tidak ada driver yang aktif pada jaringan dan semua dalam keadaan
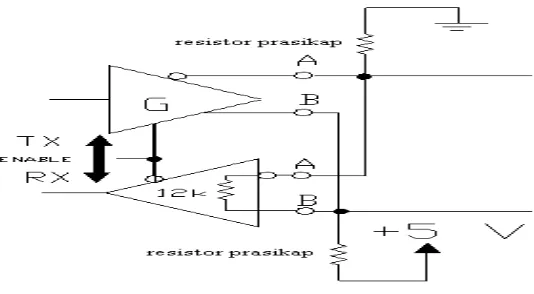
tristate. Tanpa ada yang mengendalikan jaringan, maka sistem dalam keadaan tidak menentu. Untuk menjaga status idle dalam keadaan jaringan kosong, perlu dipasangkan resistor yang dirangkai pullup dengan saluran data B terhadap VCC (umumnya bernilai +5 Volt) dan resistor pulldown
pada saluran data A terhadap ground. Gambar 2.10 memperlihatkan rangkaian transceiver dengan resistor prasikap.
Gambar 2.10 Transceiver dengan resitor prasikap
Untuk memperoleh nilai resistor prasikap adalah sebagai berikut :
1. Masing-masing nilai impedansi untuk driver RS-485 adalah 12KΩ ( RS-422 And RS-485 Application Note) dan dirangkai secara paralel, sehingga jumlah beban (Rbeban) adalah
n
beban R R R R
R 1 ... 1 1 1 1 3 2 1 + + + + = ……….(1)
dengan n maksimal = 32
2. Jumlah beban dirangkai paralel dengan 1 resistor penyesuai impedansi, sehingga jumlah beban total (Rtotal) adalah
pi pi beban
total R R R
R
1 1 1
1 = + +
……….(2)
3. Nilai amplitudo sinyal minimal adalah 200mV, sehingga arus ( I )yang dihasilkan total R I 3 10 200× −
4. Untuk menciptakan arus prasikap sebesar I dengan tegangan catu 5V, sehingga resistor ( R )yang dibutuhkan sebesar
I
R= 5………..(4)
5. Resistor prasikap yang dipasangkan pada dua sisi yaitu antara VCC dengan line B dan line A dengan ground sehingga nilai resistansi prasikap (Rprasikap) adalah
2
R
Rprasikap = ……….(5)
2.4.3 Pengaman Jaringan RS-485 Terhadap Beda Potensial Listrik
Pada sistem komunikasi dengan standar RS-485 yang menggunakan dasar sistem perbedaan potensial sinyal, perbedaan sinyal maksimal 6 Volt, maka untuk sistem dengan jarak yang jauh besar nilai amplitudo sinyal dapat berbeda, karena setiap sistem menggunakan acuan
ground lokal yang berbeda. Untuk itu perlu kiranya dibedakan antara
ground sinyal dengan referensi sinyal komunikasi. Ground sinyal adalah
grounding lokal yang dapat juga mempunyai beda potensial terhadap
ground referensi.
1. Dengan memisahkan antara ground data dengan ground lokal /
casing / ground power. Caranya dengan menggunakan koneksi optik (dapat berupa optocoupler atau komponen optik yang lain). Gambar 2.11 memperlihatkan pemisahan ground dengan isolasi optik.
2. Menyambungkan ground data dan ground lokal / ground power
dengan menggunakan konektor dengan impedansi rendah / dapat berupa resistor dengan nilai resistansi kecil. Gambar 2.12 memperlihatkan gambar penyambungan ground data dan ground
lokal dengan koneksi resistor.
Gambar 2.12 Penyambungan ground data dan ground local dengan koneksi resistor.
Ada pula cara pengamanan yang lain yaitu dengan metode
shunting device. Metode ini memiliki dua cara yang memiliki kelebihan masing-masing:
1. Cara pertama dengan memasangkan dioda zener bolak-balik secara shunt terhadap ground ataupun terhadap masing-masing penghantar jaringan. Kelebihan cara ini yaitu dapat memberi proteksi terhadap yang tinggi tetapi kelemahannya memiliki batas ambang tegangan yang tinggi dan tingkat pengamanannya lambat. Gambar 2.13 memperlihatkan gambar sistem proteksi shunting device dengan menggunakan dioda zener.
2 Cara kedua dengan memasangkan dioda zener bolak-balik secara
(a)
(b)
Gambar 2.13 Sistem proteksi shunting device dengan menggunakan dioda zener
2.5 Relay
Relay merupakan suatu saklar meka elektronis, karena relay
bekerja secara mekanis dengan membutuhkan tegangan untuk elektronisnya. Relay mempunyai kontaktor seperti pada saklar manual tetapi dikendalikan dengan tegangan dari luar seperti pada Gambar 2.14.
Relay mempunyai dua keadaan yaitu NC (Normally Close) dan NO (Normally Open). Saat tidak ada tegangan yang masuk maka kondisi untuk kaki 5 adalah NC dan kondisi untuk kaki 4 adalah NO.
Gambar 2.15 Relay
LAMPU AC
VCC
K1
3 5
4 1 2
BAB III
PERANCANGAN ALAT
3.1 Diagram Blok
Sistem pengendali lampu dengan teknologi RS 485 berbasis mikrokontroler AVR adalah suatu alat pengendali untuk menyalakan ataupun mematikan lampu dari jarak jauh. Diagram blok dari sistem kerja alat ini terdapat pada Gambar 3.1
Gambar 3.1 Diagram blok rancangan sistem pengendali lampu dengan teknologi RS 485 berbasis mikrokontroler AVR
3.2 Perancangan perangkat keras
3.2.5 Minimum sistem mikrokontroler AVR
a. Reset Eksternal
Gambar 3.2. Rangkaian reset eksternal.
Pada perancangan ini digunakan waktu 1ms untuk mereset mikrokontroler. Penentuan reset eksternal dapat dilakukan dengan mengatur nilai resistor dan kapasitornya. Untuk membuat keadaan reset,
tegangan maksimal yang harus diberikan pada pin ini Vc = 0,85 Vcc
(datasheet AVR ATmega8535 ). Karena (1 RC) t e Vcc Vc − −
= maka dapat
dicari nilai C1 dengan :
)
1
(
RC te
Vcc
Vc
−−
=
Vcc
e
Vcc
RC t85
,
0
)
1
(
−
≤
−; t = 1ms
85 , 0 ) 1 ( 1 ≤ − −RC
ms e
1
85
,
0
1−
≤
−
− RC mse
15 , 0 1 − ≤ − −RC15 , 0 ln 1 ≤ − RC ms
RC
ms
≤
×
−
1
ln
0
,
15
15 , 0 ln
1ms RC≤−
3 10 5271 ,
0 × −
=
RC
Resistor yang digunakan sebesar 10kΩ, sehingga kapasitornya dapat dicari dengan:
3 10 5271 ,
0 × −
= RC 3 10 5271 , 0
10kΩ×C = × −
Ω × = − k C 10 10 5271 , 0 3 9 10 7114 ,
52 × −
=
C
Jadi kapasitor minimum yang dapat digunakan adalah 9
10 7114 ,
52 × − . Pada perancangan ini digunakan kapasitor 56 nF.
b. Osilator
Pada perancangan ini digunakan kristal osilator 4 MHz sebagai
input clock dengan dua kapasitor C2 dan C3 sebesar 22pF (datasheet AVR Hardware Design Consideration). Rangkaian osilator yang digunakan pada perancangan ini ditunjukan pada Gambar 3.3.
Gambar 3.3. Osilator kristal yang dihubung ke mikrokontroler AVR
3.2.1.1 Mikrokontroler AVR ATmega8535
ATmega8535 berfungsi sebagai master yang mengirimkan keadaan kondisi lampu, serta menampilkan perintah di LCD. Gambar 3.4 menunjukkan mikrokontroler AVR ATmega8535 .
Gambar 3.4 ATmega8535
AVR ATMega8535 XTAL2 C2 22pF 4 MHz XTAL1 C3 22pF
R SN 75176 D SN 75176 KOL 2 KEY PAD
DE BRS 1 KEY PAD
RS LCD
KOL 3 KEY PAD DB1 LCD
DB0 LCD
RESET RE E LCD DB6 LCD BRS 3 KEY PAD
BRS 4 KEY PAD
DB3 LCD DB7 LCD BRS 2 KEY PAD
DB4 LCD KOL 1 KEY PAD
3.2.5 IC Komunikasi Serial RS-485.
Komponen utama yang digunakan pada komunikasi serial standar RS-485 pada perancangan ini adalah SN75176 yang merupakan seri 7517x buatan Texas Instrument. Data yang ditransmisikan oleh IC ini dikirim dalam bentuk perbedaan tegangan yang ada pada pin A dan B. Gambar 3.5 menunjukkan IC SN75176
Gambar 3.5 IC SN75176
SN75176 berfungsi sebagai pengirim data atau penerima data tergantung dari kondisi kaki-kaki kontrolnya yaitu DE dan RE. Apabila DE dan RE berlogika ‘0’, maka SN75176 berfungsi sebagai penerima data, sedangkan bila kaki DE dan RE berlogika ‘1’, maka SN75176 berfungsi sebagai pengirim data.
3.2.2.1 Konfigurasi Jaringan
Komunikasi RS-485 memiliki kemampuan tiga keadaan (tristate). Yaitu mengeluarkan sinyal, menerima sinyal dan keadaan terbuka (high impedance) maka dapat dikonfigurasikan untuk komunikasi
half-duplex. Jadi setiap mikrokontroler dari masing-masing rangkaian
slave dapat mengirimkan data serial secara bergantian. Gambar 3.6 menunjukkan konfigurasi multidrop 2 kabel.
Gambar 3.6 Rangkaian RS-485 dengan konfigurasi multidrop 2 kabel
3.2.2.2 Komponen Penyesuai Impedansi
Penyesuai impedansi pada jaringan diperlukan agar sinyal data yang dikeluarkan dari masing-masing mikrokontroler slave dapat diterima dengan sempurna oleh mikrokontroler master dan menghidari terjadinya
Gambar 3.7 Komponen penyesuai impedansi
3.2.2.3 Pemberian Prasikap pada Jaringan
Pemberian prasikap tegangan pada jaringan baik prasikap positif maupun prasikap negatif dimaksudkan untuk menghindari keadaan sinyal yang tidak menentu saat tidak ada data (keadaan menunggu / idle). Pemberian prasikap ini dengan cara memasangkan resistor prasikap antara
line B dengan ground dan resistor antara line A dengan VCC (+5V). Rancangan sistem komunikasi adalah sebagai berikut:
1. Memiliki 2 resistor penyesuai impedansi 120Ω, yang akan dipasangkan paralel dengan rangkaian RS-485.
2. Impedansi tiap rangkaian komunikasi RS-485 sebesar 12KΩ ( RS-422 and RS-485 Application Note) baik untuk pengirim maupun penerima. 3. Direncanakan ada 3 rangkaian komunikasi serial RS-485 (1 buah
pengirim dan 2 buah penerima).
- Jumlah beban keseluruhan 3 rangkaian, masing-masing nilai impedansinya 12KΩ dan dirangkai secara paralel sehingga jumlah beban adalah 3 2 1 1 1 1 1 R R R
Rbeban = + +
3 3 3 10 12 1 10 12 1 10 12 1 1 × + × + × = beban R 3 10 12 3 1 × = beban R Ω = K Rbeban 4
- Jumlah beban dirangkai paralel dengan 2 resistor penyesuai impedansi 120Ω, hasilnya adalah :
pi beban
total R R
R
2 1
1 = +
120 2 10 4 1 1 3 + × = total R 3 10 12 203 1 × = total R 203 10 12× 3 =
total
R
Ω =59,11 total
R
- Nilai amplitudo sinyal minimal 200mV (perhitungan nilai minimal positif) dibagi dengan nilai beban 59,11Ω menghasilkan arus
11 , 59
10 200× −3
=
mA I =3,38
- Untuk menciptakan arus prasikap sebesar 3,38mA dengan tegangan catu 5V, resistor yang dibutuhkan sebesar
3 10 38 , 3 5 − × = R Ω =1479,2
R
- Resistor prasikap yang dipasangkan pada dua sisi yaitu antara VCC dengan line B dan line A dengan ground maka nilai resistor prasikap adalah 2 2 , 1479 = prasikap R 6 , 739 = prasikap R Ω
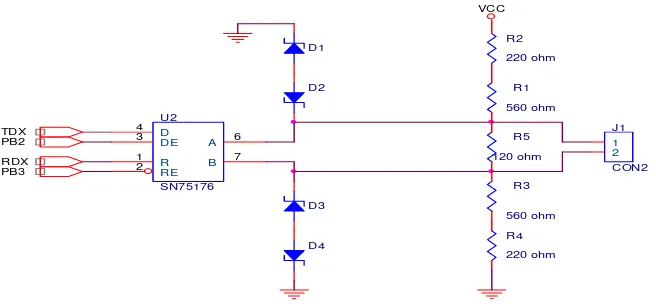
Karena nilai resistor 739,6 Ω tidak terdapat di pasaran, maka dipilih nilai yang mendekati 739,6 Ω yaitu 560Ω diseri dengan 220Ω. Atau harga untuk total resistor adalah 780 Ω. Gambar 3.8 menunjukkan Rangkaian Sistem Komunikasi RS-485
Gambar 3.8 Rangkaian sistem komunikasi RS 485
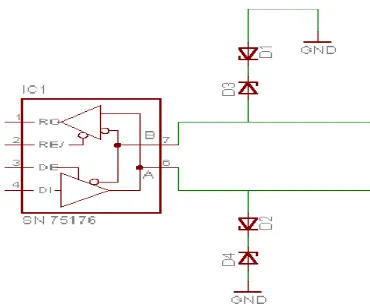
3.2.2.4 Pengamanan Beda Potensial Untuk Jaringan
Pada jaringan komunikasi yang menyambungkan antar rangkaian yang masing-masing memiliki catu daya sendiri dibutuhkan suatu pengaman jaringan terhadap beda potensial listrik. Metode yang digunakan pada rangkaian ini yaitu metode shunting device. Metode
shunting device dilakukan dengan memasangkan dioda zener yang dipasang bolak-balik antara line jaringan dan ground.
Nilai dioda zener yang digunakan merupakan nilai maksimal tegangan untuk tiap line jaringan. Dalam hal ini nilai maksimal tegangan tiap line jaringan adalah 6 Volt. Gambar 3.9 menunjukkan rangkaian pengaman dengan metode shunting device.
Gambar 3.9 Rangkaian pengaman dengan metode shunting device.
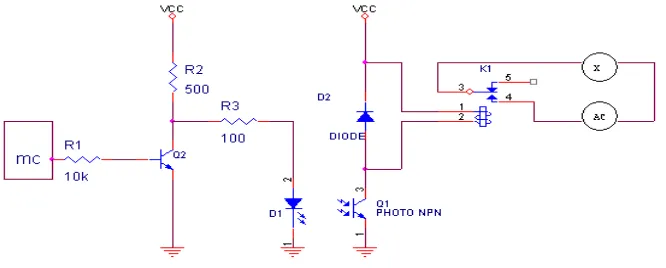
3.2.5 Rangkaian Driver Lampu
Rangkaian driver lampu berguna untuk menghidupkan lampu. Pada rangkaian ini terdapat resistor, transistor NPN, infra merah,
terang, sinar infra merah dari LED dapat dipancarkan ke phototransistor. Hal ini membuat phototransistor mendapat suplai arus pada basis dan membuat phototransistor aktif. Keluarannya bernilai besar, dan dianggap
short. Pada keadaan tersebut, maka relay akan terpicu.
Pada saat keadaan gelap, LED infra merah tidak dapat memancarkan cahaya ke phototransistor. Hal ini membuat phototransistor
tidak mendapat suplai arus ke basis yang mengakibatkan phototransistor
tidak aktif. Keluarannya bernilai kecil, pada keadaan itu terjadi threshold. Relay tidak akan terpicu untuk menghidupkan lampu. Gambar 3.10 menunjukkan rangkaian driver lampu
Gambar 3.10 Rangkaian Driver Lampu
Dari rangkaian driver dapat diketahui besar tegangan di kaki
colector (VC) dan besar tegangan di kaki colector emitter (VCE) pada saat lampu menyala atau transistor cut Off.
-Tegangan pada kaki colector (VC) , diketahui VLed adalah 1,4 Volt (data
3
- T
3.2.4 Kon
kabe kone dan k
peng untu
VC = VC = VC = 5V = 3 V Tegangan pa
VCE = V = 3 = 3 eksi kabel
Kabe el Twisted pa
ektornya dig kabel Twiste
Gambar
Dari giriman data uk level tegan
CC - VR3 - V
CC – I3R3 - V
V - 6mA .100 Volt
ada kaki cole
VC – VE V – 0V Volt
el yang digu
air (TP) yan gunakan RJ 4
ed pair.
3.11 konekt
8 kabel ma a, dua kabel
ngan +12 Vd VLed
VLed
0Ω - 1,4V
ector emiter
unakan untu g didalamny 45. gambar 3
tor RJ 45 dan asing-masing
untuk level dc. Gambar
(VCE)
uk pengirim ya terdapat 8 3.11 menunj
n kabel Twis
g terbagi me l tegangan + 3.12 menunj
man data me 8 buah kabel,
jukkan kone
sted pair
enjadi dua k + 5Vdc dan jukkan kone
nggunakan , dan untuk ektor RJ 45
Gambar 3.12 Koneksi kabel
3.2.5 Rangkaian Keypad
Pada perancangan ini, keypad yang digunakan adalah keypad
3X4. Sistem kerjanya adalah dengan scanning process, yaitu dengan melakukan pemeriksaan terus menerus yang dilakukan oleh mikrokontroler.
Gambar 3.13 Rangkaian keypad 3X4
3.3 Perancangan Perangkat lunak
3.3.1 Program Utama Master
Pada perancangan ini, master menggunakan mikrokontroler ATmega8535. Yang mempunyai fungsi memberi perintah kepada slave ATmega8535 untuk menghidupkan lampu dan memberi tampilan di LCD. Sebelum menggunakan sistem komunikasi RS 485, jalur pada sistem komunikasi tersebut akan diperiksa sibuk atau tidak.. Jika jalur sibuk, mikrokontroler akan menunggu sampai jalur tidak sibuk, baru pengiriman data dapat dilakukan. Gambar 3.14 merupakan diagram alir dari program utama master.
Gambar 3.14 Diagram alir program utama master
3.3.2 Program Utama Slave
melihat alamat yang dikirimkan oleh master kemudian melakukan eksekusi. Pada Gambar 3.15 merupakan diagram alir dari program utama
slave.
Gambar 3.15 Diagram alir program utama slave
3.3.3 Program Aktifkan LCD
atau 8x7 dot. Gambar 3.16 merupakan diagram alir program untuk mengaktifkan LCD
Gambar 3.16 Diagram alir aktifkan LCD
3.3.4 Program Periksa Jalur
START
AKTIFKAN TIMER
CEK BIT RXD
JIKA RXD=1
JALUR TIDAK SIBUK
TUNGGU SAMPAI TIMER OVER FLOW
END
RESET TIMER
YA
TDK
Gambar 3.17 Diagram alir program periksa jalur
3.3.5 Program kirim data
Pengiriman data menggunakan RS 485 berlangsung secara half duplex. Master berfungsi sebagai pengirim,. Begitu juga dengan slave
Gambar 3.18 Diagram alir program pengiriman data
3.3.6 Program Baca Data Keypad
Tahap pertama mikrokontroler menentukan kolom yang akan diperiksa dengan cara mengirim data ke satu baris. Dengan demikian hanya tedapat satu baris yang aktif. Kemudian mikrokontroler akan membaca kolom yang ditekan secara satu persatu untuk mengetahui tombol yang ditekan.
m s d j
H
B menyatakan sesuai denga dapat meng jarak jauh. AGamba
HASIL PE
Bab ini akan bahwa alat an perancan endalikan k Alat pengend
ar 4.1 Alat p
ENGAMA
n membahas yang telah d ngannya. Fun keadaaan lam dali lampu ja
pengendali la
BAB IV
ATAN DAN
data yang te dirancang da
ngsi utama mpu menya arak jauh ini
ampu jarak j
N PEMBA
elah diambil apat bekerja dari alat ya ala (ON) at ditunjukkan
auh dengan
AHASAN
l dan pembah dengan baik ang dibuat a tau padam ( n pada gamb
teknologi R
hasan yang k dan sudah adalah agar (OFF) dari bar 4.1
d R
B
R
A dua (2) slave
Rangkaian m
• Mik • LCD • Keyp
• Ran • Catu Bentuk fisik
Rangkaian s
•
•
Alat pengen
e.
master terdir krokontroler D berfungsi s
pad 3x4 ber ngkaian komu
u daya denga k rangkaian m
slave terdiri d Mikrokontr Rangkaian data.
ndali lampu j
ri dari: ATmega 85 sebagai tamp fungsi sebag unikasi RS-4 an level tega
master dapat
Gambar 4
dari : roler ATmeg
komunikas
jarak jauh in
35 berfungs pilan gai input per
485 berfung angan 5 Vdc
t dilihat pada
4.2 Rangkaia
ga 8535 berf si RS-485 b
ni terdiri ata
i sebagai un
rintah ke mik si sebagai si
dan 12Vdc a gambar 4.2
an master
fungsi sebag berfungsi seb
as satu (1) m
nit kontrol
krokontroler istem transm
2.
gai unit kontr bagai sistem
master dan
misi data.
rol
B
3
•
Bentuk fisik
3.2.4 Cara
adala peng deng lamp “Lam Deng tamp deng Rangkaian menyala (O k rangkaian s
a Pengguna
Dala ah menghidu gendalian da gan kondisi a Nom pu ke satu. S mpu 1”. Pe
gan meneka pilan ON yan
Untu gan meneka
driver be ON) atau pad
slave dapat d
Gamba
aan Pengend
am menjalan upkan powe
apat dilakuk awal lampu a mor satu (1)
Setelah nom erintah selan an tanda bin
ng menyatak uk membuat an kembali
erfungsi seb dam (OFF) dilihat pada g
ar 4.3 Rangk
dali Lampu
nkan alat ini
er supply. Se an dengan c adalah padam pada keypad
mor 1 ditekan njutnya ada ntang (*) pad
kan bahwa la t kondisi lam
keypad nom
bagai pengko
gambar 4.3
kaian slave
Jarak Jauh
, langkah pe etelah tampi cara meneka m (OFF).
d digunakan n, pada LCD alah memasu da keypad, p ampu nomor
mpu nomor mor satu
ondisi kead
h
ertama yang ilan pada LC an tombol ke
n untuk men D akan kelua
ukkan kond pada LCD a r satu (1) me r satu (1) O (1). Setelah
daan lampu
g dilakukan CD keluar,
eypad 3x4,
ngendalikan ar tampilan disi lampu. akan keluar enyala. OFF adalah
ditekan, pada LCD akan keluar tampilan “ Lampu 1”. Perintah selanjutnya adalah memasukkan kondisi lampu. Dengan menekan tanda pagar (#) pada keypad, pada LCD akan keluar tampilan OFF yang menyatakan bahwa lampu nomor satu (1) padam.
Nomor dua (2) pada keypad digunakan untuk mengendalikan lampu ke dua. Begitu seterusnya hingga keypad nomor sembilan (9) digunakan untuk mengendalikan lampu ke 9. Tanda bintang (*) pada
keypad digunakan untuk menghidupkan lampu. Sedangkan untuk memadamkan lampu menggunakan tanda pagar (#) pada keypad.
3.2.4 Pengujian dengan perintah
Sesuai perancangan pada pengendali lampu ini, terdapat dua rangkaian slave yang dihubungkan pada rangkaian master. Pengujian ini bertujuan untuk mengetahui bagaimana kinerja dari sistem, jika ada rangkaian slave yang tidak dihubungkan dengan rangkaian master.
4.2.1 Pengujian dengan perintah pada satu
rangkaian slave
Pada kondisi ini menggunakan satu rangkaian master dan satu rangkaian slave. Perintah dari keypad hanya berfungsi untuk lampu ke satu atau untuk lampu ke dua saja. Berdasarkan hasil pengamatan dapat dilihat pada tabel 4.1 ternyata perintah dengan menggunakan satu slave
Tabel 4.1 Kondisi lampu dengan perintah pada satu slave
Slave ke satu
Tombol yang ditekan Lampu ke 1
1 * ON
1 # OFF
2 2 x
1 1 x
Slave ke dua
Tombol yang ditekan Lampu ke 2
2 * ON
2 # OFF
2 2 x
1 1 x
4.2.2 Pengujian dengan perintah pada dua rangkaian slave
Pada kondisi ini menggunakan satu rangkaian master dan dua rangkaian slave. Perintah dari keypad berfungsi untuk lampu ke satu dan lampu ke dua. Berdasarkan hasil pengamatan dapat dilihat pada tabel 4.2 ternyata perintah dengan menggunakan dua slave dapat bekerja dengan baik. Hal ini membuktikan bahwa alat dapat bekerja tanpa bergantung pada jumlah slave
Tabel 4.2 Kondisi lampu dengan perintah pada dua slave
Tombol yang ditekan
Lampu ke I
Lampu ke II
1 * ON
2 * ON
1 # OFF
2 # OFF
1 1 x x
* * x x
Keterangan:
x: tidak ada perubahan
Keterangan:
3.2.4 Pengujian perangkat keras
Pengujian perangkat keras ini meliputi bagian catu daya, bagian kendali (ATMega 8535), bagian komunikasi (RS-485), bagian
keypad, dan bagian driver.
4.3.1 Rangkaian Catu Daya
Sesuai dalam perancangan, perangkat keras menggunakan satu buah catu yang mempunyai dua level tegangan. Untuk tegangan +5Vdc digunakan LM 7805 yang secara konsisten menyediakan suplai tegangan +5Vdc. Level tegangan +5Vdc digunakan sebagai Vcc bagi mikrokontroler. Sedangkan tegangan +12Vdc digunakan untuk mengaktifkan relay pada driver.
Keluaran LM 7812 adalah 11Vdc. Dengan error sebesar E=
12 11
x 100% = 8,3% tetap dapat untuk mengaktifkan relay sebesar 6Vdc.
Pada data sheet, tegangann Vcc untuk LCD sebesar 5Vdc. Tegangan dari catu sudah memenuhi tegangan referensi LCD. Tabel 4.3 menunjukkan hasil dari pengukuran tegangan catu daya pada tiap rangkaian. Untuk rangkaian slave berjarak 50 cm dari master.
Tabel 4.3 Hasil pengukuran catu daya
Catu daya 5V (regulator LM7805) Hasil pengukuran
Rangkaian master 5V
Rangkaian slave 1 4,9V
LCD 5V
Pada tabel, pengamatan dengan mengukur keluaran dari LM 7805 tidak semuanya bernilai 5Vdc. Hal tersebut terjadi dikarenakan pengaruh dari panjangnya kabel yang digunakan. Tabel 4.4 merupakan hasil pengamatan jarak panjang kabel dari master ke slave.
Tabel 4.4 Pengamatan panjang kabel
Jarak Tegangan pada slave
10 Meter 4,1 Volt
20 Meter 3,5 Volt
30 Meter 3,2 Volt
40 Meter 2,9 Volt
Pada pengamatan panjang kabel, terdapat perubahan level tegangan dengan jarak yang berbeda-beda. Semakin panjang kabel, tegangan yang diterima oleh slave akan semakin kecil. Pada jarak 40 meter tegangan yang diterima oleh slave adalah 2,9 volt. Keadaan ini tetap membuat slave masih bekerja, karena tegangan minimum yang dapat diterima oleh mikrokontroler 2,7 volt. Untuk tegangan maksimum yang dapat diterima oleh mikrokontroler 5,5 volt (data sheet microcontroller ATmega8535).
4.3.2 Rangkaian Kendali (Mikrokontroler ATmega 8535)
slave. Setiap rangkaian terdapat mikrokontroler yang menjadi pengendalinya. Mikrokontroler pada master berfungsi sebagai control unit
dengan input masukan berupa Keypad, display unit yang berupa LCD dan sistem komunikasi RS-485. Sedangkan mikrokontroler pada slave
berfungsi sebagai penerima data dan menjadi sumber input bagi rangkaian
driver.
4.3.3 Pengujian Keypad
Keypad merupakan sumber input bagi mikrokontroler. Data yang masuk harus bisa dibaca oleh mikrokontroler. Dengan sistem
scanning process pemeriksaan dilakukan terus menerus oleh mikrokontroler. Pin pada PC3 yang merupakan baris pertama, diaktifkan dengan memberi logika high, kemudian mikrokontroler akan memberi logika low pada pin PC0 yang merupakan kolom pertama. Jika terdapat perubahan logika pada baris pertama, dari logika high menjadi logika low, hal itu menunjukkan angka pada keypad yang ditekan adalah satu (1).
juga yang terjadi pada baris kedua, ketiga dan keempat, yang terletak pada pin PC4, pin PC5, dan pin PC6.
• Untuk level tegangan low memiliki batas minimum dan maksimum yaitu:
¾ Batas minimum = ─ 0,5V
¾ Batas maksimum = 0,2Vcc−0,25 = 0,2×5−0,25
= 0,75 Vdc
Untuk level tegangan high memiliki batas minimum dan maksimum yaitu:
¾ Batas minimum = 0,2Vcc+1
= 0,2×5+1
= 2 Vdc
¾ Batas maksimum = Vcc+0,5
= 5+0,5
= 5,5 Vdc
Pada pengujian keypad didapat data level tegangan low sebesar 0Vdc sedangkan level tegangan high sebesar 4Vdc. Data level tegangan yang didapat dari pengamatan atau pengujian dapat dibaca dengan baik oleh mikrokontroler karena tidak melebihi batas minimum dan maksimumnya.
Rangkaian driver berfungsi untuk memberi kondisi keadaan lampu menyala (ON) atau padam (OFF). Masukan pada rangkaian driver
terhubung pada mikrokontroler ATmega8535 di pin PD4. Pengamatan keluaran tegangan pada rangkaian driver dapat dilihat pada tabel 4.5.
Tabel 4.5 Data tegangan pada rangkaian driver
Tegangan Keadaan Nyala (ON) Keadaan Padam (OFF)
Vi 0,4 Volt 4,8 Volt
VCE 2,4 Volt 0,5 Volt
VC 2,8 Volt 0,5 Volt
VCE phototransistor 0,1 Vdc 10 Vdc
Sesuai dengan perancangan telah diketahui keluaran tegangan di kaki colector (VC) dan di kaki colector emitter (VCE). Pada tabel 4.6 dapat dilihat keluaran tegangan dengan perhitungan
Tabel 4.6 Perhitungan tegangan pada rangkaian driver
Tegangan Keadaan Nyala (ON) Keadaan Padam (OFF)
Vi 0 Volt 5 Volt
VCE 3 Volt 0 Volt
VC 3 Volt 0 Volt
Pada tabel 4.5 dan tabel 4.6 terdapat perbedaan tegangan antara teori dengan perhitungan data. Tabel 4.7 merupakan hasil dari perhitungan galat antara data teori dengan data praktek. Nilai galat yang didapat masih masuk dalam batas toleransi. Hal itu terbukti rangkaian
driver bekerja sesuai dengan input yang diberikan untuk menghasilkan kondisi lampu. % 100 Pr % = − × Teori aktek Teori Galat
Tabel 4.7 Perhitungan galat
Tegangan Keadaan Nyala (ON) Keadaan Padam (OFF)
Vi ~ 4%
VCE 20% ~
VC 6,6% ~
VCE phototransistor ~ 16%
4.3.5 Transmisi data serial
Transmisi data serial pada alat ini adalah transmisi data antara rangkaian master dan rangkaian slave yang menggunakan sistem komunikasi RS-485. Dalam mentransmisikan data dihubungkan dengan kabel twisted pair.
Pada pengamatan ini dilakukan saat rangkaian master
mengirimkan data dengan isyarat informasi 01h ke tiap-tiap rangkaian
sama maka pada slave akan melanjutkan proses yang berakhir dengan keadaan kondisi lampu. Tetapi jika tidak sama akan diabaikan oleh
slave.
Dengan menggunakan osiloskop digital dapat dilihat bentuk sinyal yang dikirimkan. Sinyal yang tampak pada gambar 4.4 merupakan sinyal pada line B atau sinyal pada saluran transmisi yang terhubung dengan pin 7 IC SN75176 (Output inverting).
Gambar 4.4 Hasil pengamatan sinyal pada line B serial RS-485
Gam TTL (RX kelu tiap amp Gamba
mbar 4.5 H
IC S L yang berfu D) mikroko aran dari pe bitnya tidak litudonya be
ar 4.6 Siny
Hasil pengam
SN75176 ber ungsi sebaga ontroler AT enerima RS-4 k berbeda de
erubah menja
yal masukan
matan sinyal
rguna untuk ai sinyal ma Tmega8535.
485 berupa engan sinyal
adi 4,4V.
untuk RXD
pada line A
k mengubah asukan untu Dari gamb sinyal digita digital form Mikrokontr
A serial RS-4
sinyal deng uk port seria bar 4.6 terli al format TT mat RS-485
roler ATmeg 85
gan format al pin PD0 ihat sinyal TL, periode
akan tetapi
3.2.4 Pengaruh panjang kabel terhadap sinyal data
Pada sistem ini, dilakukan pengujian koneksi dari rangkaian master ke rangkaian slave dengan menggunakan kabel penghantar. RS-485 mampu mentransmisi sinyal data pada medium kabel sejauh 1,2 Km. Pengamatan dilakukan dengan menggunakan kabel sejauh 10 meter, 20 meter, 30 meter dan 40 meter.
• Pengamatan sinyal data pada line A format RS-485 saat koneksi sejauh 10 meter, dapat dilihat pada gambar 4.7.
Gambar 4.7 Sinyal data line A format RS-485 pada jarak 10 meter
• Pengamatan sinyal data pada line A format RS-485 saat koneksi sejauh 20 meter, dapat dilihat pada gambar 4.8.
• Pengamatan sinyal data pada line A format RS-485 saat koneksi sejauh 30 meter, dapat dilihat pada gambar 4.9.
Gambar 4.9 Sinyal data line A format RS-485 pada jarak 30 meter
• Pengamatan sinyal data pada line A format RS-485 saat koneksi sejauh 40 meter, dapat dilihat pada gambar 4.10.
terjadi linier, dapat dibuat suatu grafik panjang kabel dimana dapat diketahui maksimal panjang kabel yang dapat digunakan. Gambar 4.11 merupakan gambar grafik panjang kabel.
Gambar 4.11 Grafik panjang kabel terhadap tegangan yang dikirim
Dari grafik dapat dilihat, dengan penurunan sebesar 0.3 volt tiap 10 meternya. Pada jarak 100 meter didapat besar amplitudo 400 mV. Dalam hal ini sistem komunikasi serial RS-485 masih mampu untuk menerima sinyal data. Hal itu terjadi dikarenakan pada penerima (reciever) RS-485 secara teoritis mampu menerima data dengan nilai amplitudo sinyal minimal +200mV sampai -200mv (data sheet SN75176). Jarak 100 meter dapat digunakan jika tegangan minimum dan maksimum pada slave adalah 2,7 volt dan 5,5 volt (data sheet microcontroller ATmega8535).
Grafik panjang kabel
3.1 2.8 2.5 2.2 1.9 1.6 1.3 1 0.7 0.4 0.1 0 0.5 1 1.5 2 2.5 3 3.5
10 30 50 70 90 110
m eter
vo
BAB V
KESIMPULAN DAN SARAN
Dari pembahasan dan pengujian dari alat yang telah dibuat berdasarkan hasil rancangan, maka pada bab ini dapat diambil kesimpulan dan beberapa saran yang berguna untuk pengembangan alat.
5.1 KESIMPULAN
1. Alat pengendali lampu jarak jauh ini dapat bekerja dengan baik. Hal ini terbukti dari perintah yang diberikan oleh keypad dapat menyalakan (ON) ataupun mematikan (OFF) lampu yang diinginkan.
2. Alat tetap bekerja dengan baik, walaupun hanya terdapat satu rangkain slave yang terhubung pada rangkaian master.
3. Sistem komunikasi serial RS-485 pada alat ini mampu mengendalikan sampai 9 lampu dengan kabel penghantar sejauh 40 meter.
5.2 SARAN
DAFTAR PUSTAKA
__________,2007, AVR Microcontroller ATmega8535 Datasheet,
http://www.atmel.com, Atmel Semiconductor.
___________, 2007, SN75176 RS 485Datasheet, http://www.datasheet4u.com
Wardhana Lingga,2006, Mikrokontroler AVR seri ATMega8535, ANDI OFFSET, Yogyakarta
__________,1996, Device Specification For PHOTOCOUPLER Model No. PC817 Datasheet,
http://www.datasheetcatalog.com
__________,1992, RS-422 and RS-485 Application Note
Robert Boylestad,1996, Electronic Device And Circuit Theory, PRENTICE HALL Englewood Cliffs, New Jersey
___________, 1999, BC 546; BC 547 NPN general purpose transistorDatasheet, http://www.datasheet4u.com
___________, 1999, The concise LCD data sheet,
http://www.senet.com
; MASTER
.nolist ;Suppress listing of include file .include"m8535def.inc" ;Define chip particulars
.list ;
.equ fclock =4000000 .equ baud_rate =9600
.equ ubbr_value =(fclock/(16*baud_rate))-1 .def digit4 =R07
.def digit3 =R08
.def digit2 =R09 .def digit1 =R10 .def timeout =R11 .def delay1 =R12 .def delay2 =R13 .def delay3 =R14
.def temp =R16
.cseg
.org 0x000
rjmp RESET
;
RESET:
ldi temp,high(RAMEND)
out SPH,temp
ldi r16,low(RAMEND)
out SPL,temp
ldi temp,0xFF
out DDRA,temp
ldi temp,0b11111000
out DDRC,temp
ldi temp,0b11111111
out PORTC,temp
ldi temp,0xFF
out DDRD,temp
ldi temp,0b00000011
out DDRB,temp
sbi PortC,3
sbi PortC,4
sbi PortC,5
sbi PortB,2
sbi PortB,3
rcall initlcd rcall initUSART
ldi temp,0b00000001
rcall write_inst
ldi zl,low(Awal*2)
ldi zh,high(Awal*2)
rcall tulis
ldi temp,0b11000000
rcall write_inst
ldi zl,low(Awal1*2)
ldi zh,high(Awal1*2)
rcall tulis
rcall Ldelay
lagi:
cbi PortC,3
sbi PortC,4
sbi PortC,5
sbi PortC,6
rcall delay
sbis PinC,0
rcall delay
sbis PinC,1
rcall dua
rcall delay
sbis PinC,2
rcall tiga
sbi PortC,3
cbi PortC,4
sbi PortC,5
sbi PortC,6
rcall delay
sbis PinC,0
rcall empat
rcall delay
sbis PinC,1
rcall lima
rcall delay
sbis PinC,2
rcall enam
sbi PortC,3
sbi PortC,4
cbi PortC,5
rcall delay
sbis PinC,0
rcall tujuh
rcall delay
sbis PinC,1
rcall delapan
rcall delay
sbis PinC,2
rcall sembilan
sbi PortC,3
sbi PortC,4
sbi PortC,5
cbi PortC,6
rcall delay
sbis PinC,0
rcall bintang
rcall delay
sbis PinC,1
rcall nol
rcall delay
sbis PinC,2
rcall kres
; satu:
ldi temp,0b00000001 rcall write_inst
ldi temp,'L'
rcall write_data
ldi temp,'a'
rcall write_data
ldi temp,'m'
rcall write_data
ldi temp,'p'
rcall write_data
ldi temp,'u'
rcall write_data ldi temp,' ' rcall write_data
ldi temp,'1'
rcall write_data
ldi temp,1
rcall kirimSlave ret
dua:
rcall write_inst
ldi temp,'L'
rcall write_data
ldi temp,'a'
rcall write_data
ldi temp,'m'
rcall write_data
ldi temp,'p'
rcall write_data
ldi temp,'u'
rcall write_data ldi temp,' ' rcall write_data
ldi temp,'2'
rcall write_data
ldi temp,2
rcall kirimSlave ret
tiga:
ldi temp,0b00000001 rcall write_inst
ldi temp,'L'
ldi temp,'a' rcall write_data
ldi temp,'m'
rcall write_