ANALISIS MODEL MANGSA-PEMANGSA HOLLING-TANNER
TIPE II DENGAN MANGSA YANG TERLINDUNG DAN
ADANYA PEMANENAN POPULASI
EKA PUJIYANTI
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2014
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Analisis Model Mangsa-Pemangsa Holling-Tanner Tipe II dengan Mangsa yang Terlindung dan Adanya Pemanenan Populasi adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Agustus 2014
Eka Pujiyanti
ABSTRAK
EKA PUJIYANTI. Analisis Model Mangsa-Pemangsa Holling-Tanner Tipe II dengan Mangsa yang Terlindung dan Adanya Pemanenan Populasi. Dibimbing oleh ALI KUSNANTO dan PAIAN SIANTURI.
Dalam tulisan ini dipelajari model mangsa-pemangsa Holling-Tanner tipe II dengan menambahkan spesies mangsa yang terlindung dan pemanenan spesies mangsa dan pemangsa yang dikembangkan oleh Das et al. (2013). Dari model ini, diperoleh tiga titik tetap. Kestabilan titik tetap pertama dapat bersifat sadel atau simpul takstabil, sedangkan titik tetap kedua bersifat sadel. Titik tetap ketiga dapat bersifat spiral takstabil, spiral stabil, atau simpul stabil bergantung nilai parameter mangsa yang terlindung dan pemanenan populasi. Bifurkasi Hopf terjadi pada titik tetap ketiga. Semakin kecil mangsa yang terlindungi mengakibatkan populasi pemangsa meningkat tidak stabil dengan solusinya limit cycle. Sebaliknya, semakin tinggi mangsa yang terlindungi mengakibatkan populasi mangsa dan pemangsa menuju stabil dengan pemangsa cukup kecil. Hal ini terjadi pula pada dinamika populasi akibat usaha pemanenan mangsa. Sedangkan pada usaha pemanenan pemangsa, semakin kecil pemanenan pemangsa mengakibatkan populasi pemangsa meningkat tidak stabil dengan solusinya limit cycle. Semakin tinggi pemanenan pemangsa mengakibatkan populasi pemangsa menuju kepunahan dan populasi mangsa meningkat stabil.
Kata Kunci: bifurkasi Hopf, Holling-Tanner tipe II, mangsa yang terlindung, pemanenan populasi, mangsa-pemangsa.
ABSTRACT
EKA PUJIYANTI. Analysis of Predator-Prey Model of Holling-Tanner Type II with Prey Refuge and the Harvesting Population. Supervised by ALI KUSNANTO and PAIAN SIANTURI.
This paper studied a mathematical predator-prey model of Holling-Tanner type II incorporating prey refuge and harvesting to both prey and predator species that was previously investigated by Das et al. (2013). This model provides three fixed points, where depending on the parameters values, stability of the first fixed point can be a saddle or unstable node, that of the second always be a saddle, and the third fixed point could be an unstable spiral, stable spiral or node depending on two parameters of protected prey and harvesting populations. Hopf bifurcation occurs on the third fixed point, where a decrease on the size of protected prey can affect the predator populations to be unstable and its solution approaching a limit cycle. Otherwise, an increase on the size of protected prey can affect the prey and predator populations to be stable with a fairly small predators. The same situation occurs also in the population dynamics when a harvesting effort is incurred on prey population. Whereas a decrease on the harvested predator population can result to an unstable growth of predator population with the existence of a limit cycle. In the opposite direction, the predator will be extinct and the prey grows steadily.
Keywords: Hopf bifurcation, Holling-Tanner type II, prey refuge, harvesting populations, predator-prey.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains
pada
Departemen Matematika
ANALISIS MODEL MANGSA-PEMANGSA HOLLING-TANNER
TIPE II DENGAN MANGSA YANG TERLINDUNG DAN
ADANYA PEMANENAN POPULASI
EKA PUJIYANTI
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2014
Judul Skripsi : Analisis Model Mangsa-Pemangsa Holling-Tanner Tipe II dengan Mangsa yang Terlindung dan Adanya Pemanenan Populasi
Nama : Eka Pujiyanti NIM : G54100039
Disetujui oleh
Drs Ali Kusnanto, MSi Pembimbing I Dr Paian Sianturi Pembimbing II Diketahui oleh Dr Toni Bakhtiar, MSc Ketua Departemen Tanggal Lulus:
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah yang berjudul Analisis Model Mangsa-Pemangsa Holling-Tanner Tipe II dengan Mangsa yang Terlindung dan Adanya Pemanenan Populasi berhasil diselesaikan.
Terima kasih penulis ucapkan kepada Bapak Drs Ali Kusnanto, MSi dan Bapak Dr Paian Sianturi selaku pembimbing yang telah memberikan pengarahan, bimbingan, dan motivasi dalam penelitian dan penulisan karya ilmiah ini, kepada Bapak Ir Ngakan Komang Kutha Ardana, MSc yang telah banyak memberi saran dan perbaikan, serta kepada seluruh dosen dan staf Departemen Matematika IPB atas segala ilmu yang diberikan dan bantuannya selama perkuliahan. Tak lupa juga ucapan terima kasih yang mendalam kepada Ibu dan Ayah tercinta (Ibu Lasmi dan Bapak Suradi), mas Warno, adik Eko, Johan Iskandar, sahabat Matematika 45, 46, 47, dan 48, teman seperjuangan di Wisma Pelangi, serta semua sahabat atas doa, saran, motivasi yang telah banyak membantu dalam proses penyusunan karya ilmiah ini.
Semoga karya ilmiah ini bermanfaat.
Bogor, Agustus 2014
DAFTAR ISI
DAFTAR TABEL viii
DAFTAR GAMBAR viii
DAFTAR LAMPIRAN viii
PENDAHULUAN 1 Latar Belakang 1 Tujuan 2 LANDASAN TEORI 2 PEMODELAN 5 PEMBAHASAN 7
Penentuan Titik Tetap Model 7
Analisis Kestabilan Titik Tetap Model 8
Bifurkasi Hopf 9
Simulasi Dinamika Populasi Mangsa Pemangsa 12
SIMPULAN 23
DAFTAR PUSTAKA 24
LAMPIRAN 25
DAFTAR TABEL
1 Kestabilan titik tetap dan 11
2 Nilai parameter 12
3 Titik tetap, nilai eigen dan jenis kestabilan saat m = 0.7 13 4 Titik tetap, nilai eigen dan jenis kestabilan saat m = 1.6 13 5 Syarat nilai terjadinya bifurkasi Hopf akibat pengaruh m 13 6 Titik tetap, nilai eigen dan jenis kestabilan saat m = 38.5 15 7 Titik tetap, nilai eigen dan jenis kestabilan saat m = 0.0005 16 8 Titik tetap, nilai eigen dan jenis kestabilan saat = 1.5 17 9 Syarat nilai terjadinya bifurkasi Hopf akibat pengaruh 17 10 Titik tetap, nilai eigen dan jenis kestabilan saat = 10.5 18 11 Titik tetap, nilai eigen dan jenis kestabilan saat = 0.1 19 12 Titik tetap, nilai eigen dan jenis kestabilan saat = 3 20 13 Syarat nilai terjadinya bifurkasi Hopf akibat pengaruh 20 14 Titik tetap, nilai eigen dan jenis kestabilan saat = 12.5 21 15 Titik tetap, nilai eigen dan jenis kestabilan saat = 0.0005 22 16 Kestabilan titik tetap pada masing-masing simulasi 23
DAFTAR GAMBAR
1 Pengaruh terhadap x dan y (a), pengaruh terhadap x dan y (b),
pengaruh terhadap x dan y (c) 12
2 Bidang fase saat m = 0.7 (a) dan bidang fase saat m = 1.6 (b) 14 3 Bidang solusi saat m = 0.7 (a) dan bidang solusi saat m = 1.6 (b) 14 4 Bidang fase (a) dan bidang solusi (b) saat m = 38.5 15 5 Bidang fase (a) dan bidang solusi (b) saat m = 0.0005 16 6 Bidang fase (a) dan bidang solusi (b) saat = 1.5 17 7 Bidang fase (a) dan bidang solusi (b) saat = 10.5 18 8 Bidang fase (a) dan bidang solusi (b) saat = 0.1 19 9 Bidang fase (a) dan bidang solusi (b) saat = 3 20 10 Bidang fase (a) dan bidang solusi (b) saat = 12.5 21 11 Bidang fase (a) dan bidang solusi (b) saat = 0.0005 22
DAFTAR LAMPIRAN
1 Penentuan titik tetap model 25
2 Penentuan nilai eigen model 28
3 Kode program Gambar 1 29
4 Kode program Gambar 2 30
5 Kode program Gambar 3 31
6 Kode program Gambar 4 32
7 Kode program Gambar 5 33
8 Kode program Gambar 6 33
10 Kode program Gambar 8 34
11 Kode program Gambar 9 35
12 Kode program Gambar 10 36
PENDAHULUAN
Latar Belakang
Bumi merupakan satu sistem tata surya yang kompleks. Karena segala sesuatu yang ada di dalamnya saling bergantung satu sama lain. Ketergantungan yang dimaksud berupa interaksi antara makhluk hidup dengan lingkungan di sekitarnya dan makhluk hidup dengan makhluk hidup lainnya. Makhluk hidup itu sendiri terdiri atas bermacam-macam spesies yang membentuk suatu populasi. Ada beberapa jenis hubungan yang dapat terjadi antarspesies. Salah satu interaksinya adalah predasi, yaitu hubungan antara mangsa dan pemangsa yang erat kaitannya satu sama lain. Jika di bumi ini tidak terdapat mangsa maka pemangsa tidak mampu bertahan hidup dan berkembangbiak karena tidak ada sumber makanan sehingga menyebabkan terjadinya kepunahan. Untuk mengontrol tingkat predasi agar tidak menyebabkan terjadinya kepunahan pada kedua spesies, maka diberikan perlakuan terhadap kedua populasi, yaitu dengan melindungi mangsa dan memanen populasi mangsa pemangsa secara teratur. Jumlah mangsa yang dikonsumsi oleh setiap pemangsa digambarkan dengan respons fungsional. Kehadiran pemangsa merupakan salah satu faktor yang secara langsung memengaruhi populasi mangsa. Di dalam hubungan tersebut pemangsa juga berperan sebagai pengontrol populasi mangsa.
Saat ini interaksi antar makhluk hidup merupakan suatu topik penting untuk diteliti. Para peneliti di bidang fisika menyatakan suatu model generik dapat dibangun guna menjelaskan fenomena yang terjadi di alam. Tidak hanya itu, para peneliti di bidang ilmu pengetahuan lain juga menyatakan bahwa model generik dibangun guna menjelaskan situasi tertentu. Jadi dalam hal ini, model diperlukan karena kompleksitas ekosistem. Salah satu penelitian yang telah dilakukan yaitu membuat pemodelan matematika yang dapat mensimulasikan hubungan antar makhluk hidup.
Alfred Lotka dan Vito Volterra dalam Gasull et al. (1997) mengembangkan sepasang persamaan diferensial yang menggambarkan fenomena mangsa pemangsa yang dikenal dengan model Lotka-Volterra. Salah satu kekurangan dari model Lotka-Volterra yaitu ketergantungan pada asumsi yang tidak realistis karena populasi mangsa dapat tumbuh tanpa batas banyaknya saat ketidakhadiran pemangsa. Tak lama, berkembang suatu model modifikasi Lotka-Volterra yaitu model Holling-Tanner yang menggambarkan adanya kompetisi yang terjadi di antara para mangsa saat kepadatan yang tinggi untuk mendapatkan sumber daya mereka.
Dalam karya ilmiah ini, penulis mempelajari dinamika solusi model mangsa-pemangsa Holling-Tanner tipe II yang dijelaskan oleh Das et al. (2013). Respons fungsional model Holling-Tanner ini diberikan perlakuan mangsa yang terlindung dan adanya usaha pemanenan populasi guna mencegah terjadinya kepunahan kedua spesies. Dalam tulisan ini juga akan diperiksa bifurkasi Hopf yang terjadi pada dinamika populasi sistem.
2
Tujuan
Tujuan dari karya ilmiah ini ialah sebagai berikut:
1 Mempelajari dinamika solusi model mangsa-pemangsa Holling-Tanner tipe II dengan mangsa yang terlindung dan adanya usaha pemanenan populasi oleh Das
et al. (2013),
2 Menganalisis kestabilan titik tetap populasi dari model mangsa-pemangsa dengan Holling-Tanner tipe II di atas,
3 Menganalisis bifurkasi Hopf yang terjadi pada sistem dinamik mangsa-pemangsa Holling-Tanner tipe II akibat perubahan tingkat mangsa yang terlindung dan akibat perubahan usaha pemanenan pada kedua populasi tersebut.
LANDASAN TEORI
Persamaan diferensial biasa diartikan sebagai suatu persamaan yang melibatkan turunan pertama atau lebih dari fungsi sebarang terhadap peubah (Farlow 1994). Misalkan diberi sistem persamaan diferensial taklinear sebagai berikut:
̇ ( ) (1) Persamaan (1) disebut sistem dimensi satu atau sistem orde satu dengan ( ) adalah nilai real fungsi dari waktu dan ( ) adalah nilai real fungsi dari . Persamaan (1) mempunyai titik tetap jika memenuhi ( ) . Titik tetap disebut juga titik kritis atau titik kesetimbangan (Tu 1994).
Verhulst (1990) menyatakan bahwa misalkan titik yaitu titik tetap sistem persamaan diferensial dan ( ) yaitu solusi sistem persamaan diferensial yang diberikan suatu nilai awal ( ) dengan . Titik disebut titik tetap stabil jika untuk sembarang terdapat sedemikian sehingga jika posisi awal memenuhi | | maka solusi ( ) memenuhi | ( ) | , untuk setiap dan jika titik disebut titik tetap takstabil jika untuk sembarang terdapat dengan ciri sebagai berikut: untuk sembarang terdapat nilai awal memenuhi | | , sehingga solusi ( ) memenuhi | ( ) | , untuk paling sedikit satu
Persamaan (1) dengan menggunakan perluasan Taylor pada titik tetap dilakukan penyederhanaan titik tetap didefinisikan pada titik asal, maka diperoleh: ̇ ( ) ( ) ( )| sehingga [ ]
3
Matriks A disebut matriks Jacobi pada titik tetap dan fungsi ( ) memenuhi ( ) sehingga menyebabkan sistem persamaan diferensial (1) dapat didekati oleh:
̇ (2) Sistem (2) disebut sebagai pelinearan dari sistem persamaan diferensial (1) (Tu 1994).
Anton & Rorres (2004) menyatakan jika A adalah sebuah matriks berukuran
n × n, maka sebuah vektor tak nol di Rn dinamakan vektor eigen dari A jika adalah kelipatan skalar dari yaitu:
(3)
Skalar ini dinamakan nilai eigen dari A, sedangkan x dinamakan vektor eigen yang bersesuaian dengan . Untuk mencari nilai eigen dari matriks A yang berukuran n × n, maka:
atau
( ) (4)
Persamaan (4) akan mempunyai penyelesaian tak nol jika dan hanya jika:
( ) (5) Persamaan (5) adalah sebuah persamaan polinomial dalam yang dinamakan polinomial karakteristik dari A.
Menurut Tu (1994) analisis kestabilan titik tetap dilakukan melalui matriks Jacobi, yaitu matriks A. Penentuan kestabilan titik tetap didapat dari nilai-nilai eigen, yaitu yang diperoleh dari det( )
Pada umumnya, kestabilan titik tetap memiliki tiga sifat yaitu: a. Dikatakan titik tetap stabil, jika:
setiap nilai eigen real negatif ( ),
setiap nilai eigen kompleks bagian realnya lebih kecil atau sama dengan nol (Re( ) ).
b. Dikatakan titik tetap takstabil, jika:
setiap nilai eigen real positif ( ),
setiap nilai eigen kompleks bagian realnya lebih besar atau sama dengan nol (Re( ) )
c. Dikatakan titik sadel, jika perkalian dua buah nilai eigen real sembarang negatif ( untuk dan sembarang). Titik sadel ini bersifat takstabil.
Struktur kualitatif dari suatu sistem dinamika dapat mengalami perubahan karena adanya perubahan dari parameter sistem dinamika tersebut (Strogatz 1994). Bifurkasi adalah perubahan jumlah titik tetap dalam suatu sistem dinamik. Dalam hal ini ada yang disebut dengan titik bifurkasi yaitu nilai parameter ketika terjadi
4
bifurkasi. Umumnya bifurkasi yang dibahas yaitu bifurkasi Hopf. Pada bifurkasi Hopf terdapat kemunculan siklus batas (limit cycle) dari kesetimbangan sistem dinamis yang dihasilkan oleh persamaan diferensial biasa, ketika kesetimbangan mengalami perubahan stabilitas melalui sepasang nilai eigen murni imajiner.
Limit cycle merupakan suatu orbit tertutup yang terisolasi. Disebut orbit terisolasi
karena orbit di sekelilingnya menuju atau menjauhi siklus limit (Strogatz 1994). Bifurkasi ada yang bersifat superkritis atau subkritis yang mengakibatkan limit
cycle menjadi stabil atau tidak stabil.
Menurut Edelstein-Keshet (1988) untuk menentukan bifurkasi Hopf dapat menggunakan suatu teorema, yang sering dikenal teorema bifurkasi Hopf. Teorema ini terdiri dari kasus dan saat kasus .
Teorema bifurkasi Hopf untuk kasus : misalkan sebuah sistem dari dua persamaan sama-sama memiliki parameter sebagai berikut:
̇ ( ) ̇ ( )
Dengan persamaan diferensial biasa dan asumsikan dan adalah fungsi dari dan . Anggap setiap nilai pada kedua persamaan diatas adalah tetap dan parameter dan dipengaruhi oleh ( ̅( ) ̅( )). Asumsikan matriks Jacobi dengan parameter yang tetap adalah sebagai berikut:
[ ]( ̅ ̅)
Andaikan nilai eigen dari matriks tersebut adalah ( ) ( ) ( ) . Dan nilainya adalah , disebut dengan nilai bifurkasi, dimana ( ) , ( ) dan juga ketika nilai divariasikan sampai nilainya sama dengan maka perubahan nilai eigennya adalah( ⁄ pada )
Dengan adanya hipotesis di atas maka muncul kemungkinan-kemungkinan berikut:
1. Saat nilai maka pusatnya titik tetap (steady state), dan lingkaran-lingkaran tertutup yang tak terhingga mengorbit mengelilingi titik ( ̅ ̅) 2. Untuk orbit lingkaran terbatas memiliki rentang nilai adalah .
Dan saat nilai divariasikan maka diameter lingkarannya akan berubah sebesar | | . Sehingga tidak ada lingkaran tertutup yang mengelilingi titik ( ̅ ̅) Ketika terbentuk lingkaran berhingga dengan nilai lebih besar dari maka akan terjadi supercritical bifurcation. 3. Rentang digunakan untuk kasus 2 penahan (hold/pengendali).
Lingkaran berhingga yang terjadi saat nilai lebih kecil dari disebut dengan subcritical bifurcation.
Menurut Edelstein-Keshet (1988) untuk menentukan suatu kestabilan titik tetap, berdasarkan persamaan karakteristik dapat menggunakan teorema
5 Teorema Routh-Hurwitz Criteria: misalkan diberikan persamaan polinomial karakteristik sebagai berikut:
( ) (6) Didefinisikan k matriks yaitu sebagai berikut:
, - [ ] [ ] [ ] [ ]
di mana syarat setiap unsur ( ) pada matriks adalah: untuk ,
untuk ,
0 untuk atau .
Titik tetap ̅ stabil jika dan hanya jika det , untuk setiap kriteria Routh-Hurwitz untuk dan 4 yaitu:
,
, ,
, , .
PEMODELAN
Gonzalez-Olivares dan Ramos-Jiliberto (2003) mempelajari model mangsa pemangsa dengan jumlah mangsa konstan menggunakan perlindungan, sebagai berikut: . / ( ) ( ) ( ) ( )
dengan ( ) ( ) , di mana dan menunjukkan populasi mangsa dan pemangsa, dan , mewakili laju pertumbuhan intrinsik dan daya dukung lingkungan mangsa. Konstanta mewakili jumlah mangsa yang mencari perlindungan dari predasi. Parameter adalah laju kematian pemangsa dan parameter adalah faktor konversi. Ji dan Wu (2010) mengembangkan model
6
mangsa pemangsa dengan perlindungan mangsa konstan dan laju pemanenan mangsa konstan sebagai berikut,
. / ( ) ( ) ( ) ( )
dan mempelajari ketidakstabilan dan kestabilan global titik tetap dan keunikan
limit cycle serta menunjukkan pengaruh perlindugan mangsa konstan dan laju
pemanenan mangsa konstan.
Termotivasi oleh paper Gonzalez-Olivares dan Ramos-Jiliberto (2003), dimodelkan sistem mangsa-pemangsa sebagai berikut:
. / ( ) ( ) (7) ( ) ( )
di mana dan menunjukkan usaha pemanenan untuk mangsa dan pemangsa, dan , mewakili hasil tangkapan dari populasi mangsa dan pemangsa, di mana dan , mewakili koefisien catchability (ketertangkapan) populasi mangsa dan pemangsa.
Untuk menyederhanakan persamaan (7) Das et al. (2013) memisalkan , maka persamaan (7) berubah menjadi model matematika dalam bentuk sistem persamaan sebagai berikut (ditandai dengan ):
( ) ( ) ( ) (8)
di mana dan dengan: : banyaknya populasi mangsa,
: banyaknya populasi pemangsa, : laju pertumbuhan intrinsik mangsa,
: usaha pemanenan mangsa, : usaha pemanenan pemangsa,
: koefisien yang menunjukkan penurunan laju pertumbuhan mangsa karena kehadiran satu individu pemangsa,
: koefisien yang menunjukkan peningkatan laju pertumbuhan pemangsa karena kehadiran satu individu mangsa,
: laju kematian pemangsa, : daya dukung lingkungan,
7 : koefisien catchability populasi mangsa,
: koefisien catchability populasi pemangsa, : tingkat kejenuhan mangsa.
Respons fungsional pada model (8) di atas dinyatakan dengan ( )
yang menggambarkan laju pemangsaan atau ketersediaan makanan bagi pemangsa. Laju pertumbuhan populasi mangsa dipengaruhi oleh laju pertumbuhan intrinsik mangsa ( ) dan banyaknya mangsa yang terlindung ( ) kemudian akan berkurang karena laju pertumbuhan pemangsa y serta adanya usaha dalam pemanenan mangsa ( ), di mana tumbuh secara logistik.
Laju pertumbuhan populasi pemangsa dipengaruhi oleh kemampuan maksimum pemangsa dalam mencari mangsa ( ) dan tingkat kejenuhan mangsa ( ) dikurangi laju kematian pemangsa ( ) serta adanya usaha pemanenan pemangsa ( ).
PEMBAHASAN
Penentuan Titik Tetap Model Titik tetap persamaan (8) didapatkan dari
dan
sehingga diperoleh persamaan (8) menjadi:
( ) ( )
( ) (9)
(10)
Dengan menyelesaikan sistem persamaan (9) dan (10), diperoleh 3 titik tetap, yaitu ( ) ( ) ( ) dengan:
( ( )( ) ( ))
8
Analisis Kestabilan Titik Tetap
Dengan melakukan pelinearan pada persamaan (8), diperoleh matriks Jacobi persamaan (11) sebagai berikut:
* ( )( ) (( ) ) ( ) ( ) +.
Nilai eigen yang dihasilkan oleh matriks Jacobi persamaan (11) menunjukkan kestabilan titik tetap dengan mengevaluasi titik tetap tersebut. Selanjutnya, kestabilan di sekitar titik tetap diperiksa.
Titik tetap ( ) disubsitusikan pada matriks Jacobi persamaan (11), maka diperoleh matriks Jacobi sebagai berikut:
( ) [ ]
Untuk memperoleh nilai eigen dari ( ) maka | | , yaitu:
( ) .
/ , didapat nilai eigen sebagai berikut:
Karena diasumsikan parameter positif, titik tetap merupakan titik sadel jika dan . Jika dan titik tetap merupakan titik sadel.
(Bukti pelinearan di titik tetap dapat dilihat pada Lampiran 2) Titik tetap ( ) disubsitusikan pada matriks Jacobi persamaan (11), maka diperoleh matriks Jacobi sebagai berikut:
( ) 0 1 dengan ( ( )) ( ( )) . / ( ( )) ( ) ( )
9
( ) ( )
Untuk memperoleh nilai eigen dari ( ) maka | | , yaitu: ( )( ) ,
didapat nilai eigen sebagai berikut:
( )
( )
Karena diasumsikan parameter positif, titik tetap merupakan titik stabil jika dan . Jika dan maka titik tetap merupakan titik sadel.
(Bukti pelinearan di titik tetap dapat dilihat pada Lampiran 2) Kestabilan titik tetap ( ) ditentukan oleh persamaan karakteristik sebagai berikut: ( ) dengan ( ) ( )
Menurut kriteria teorema Routh-Hurwitz Criteria titik tetap akan stabil jika memenuhi kondisi:
dan sehingga kondisi yang harus dipenuhi adalah:
( ) dan ( )
(Bukti pelinearan di titik tetap dapat dilihat pada Lampiran 2)
Bifurkasi Hopf
Dalam sistem dinamik taklinear akan dijumpai transisi dari keadaan stabil ke suatu keadaan tidak stabil ataupun keadaan sebaliknya. Kondisi seperti ini disebut dengan bifurkasi. Misalkan sistem persamaan diferensial ̇ ( ) dan ̇ ( ) dengan parameter . Diasumsikan system persamaan diferensial tersebut mempunyai titik setimbang ( ) dan adalah nilai parameter yang menyebabkan terjadinya bifurkasi. Bifurkasi Hopf
10
terjadi jika titik setimbang mempunyai sepasang nilai eigen kompleks yaitu ( ) ( ) ( ) dan ( ) ( ) ( ) dengan ( ) dan ( ) . Namun, menurut Strogatz (1994) bifurkasi Hopf terjadi ketika kesetimbangan mengalami perubahan stabilitas dan terjadinya kemunculan limit
cycle. Perubahan stabilitas yang dimaksud adalah ketika titik tetap yang semula
memiliki kestabilan spiral stabil menjadi spiral tidak stabil atau sebaliknya. Menurut Wang et al. (2011) sekarang persamaan (8) diubah dalam bentuk:
( )( ( ) ) (12) ( ( ) ) di mana ( ) . / ( )( ) . / ( ) . / ( ) . / . / ( ) ( ) ( ) ( )
Pada bagian ini Das et al. (2013) menguji saat terjadi bifurkasi Hopf. Matriks Jacobi dari persamaan (12) adalah:
[ ( ) ( ) ( ) ] di mana ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
Kestabilan titik tetap dari matriks Jacobi tersebut, ditentukan oleh persamaan karakteristik sebagai berikut:
di mana ( ) ( ) ( ) dan dan ( ̅) dan √ ( ) ( ) ( ) ( ) dan ( ) √ ( ) ( ) * ( )+ dan ( ) * ( ) ( )+ * ( ) ( ) ( ) ( )+
11 Nilai ̅ yang berasal dari ( ) (seperti ( ) ), yang mana ̅ , memenuhi persamaan:
( ) ( ) dan juga ( ̅) .
Pada persamaan (12) mengalami bifurkasi Hopf ketika ̅ jika: ( )| ̅ ( ̅) ( ̅)
seperti halnya ( ̅) .
Nilai parameter menyatakan tingkat mangsa yang terlindung, misalkan adalah tingkat mangsa yang terlindung pada saat terjadi bifurkasi Hopf. Kondisi yang menjadi syarat perlu dan cukup agar terjadi bifurkasi Hopf jika: ( ) dan ( ) sehingga ( ) ( ) ( ) di mana
( )|
Nilai parameter menyatakan tingkat pemanenan mangsa, misalkan adalah tingkat pemanenan mangsa pada saat terjadi bifurkasi Hopf. Kondisi yang menjadi syarat perlu dan cukup agar terjadi bifurkasi Hopf jika:
( ) dan ( ) sehingga ( ) ( ) ( )
di mana ( )|
Nilai parameter menyatakan tingkat pemanenan pemangsa, misalkan adalah tingkat pemanenan pemangsa pada saat terjadi bifurkasi Hopf. Kondisi yang menjadi syarat perlu dan cukup agar terjadi bifurkasi Hopf jika:
( ) dan ( ) sehingga ( )
( ) ( )
di mana ( )|
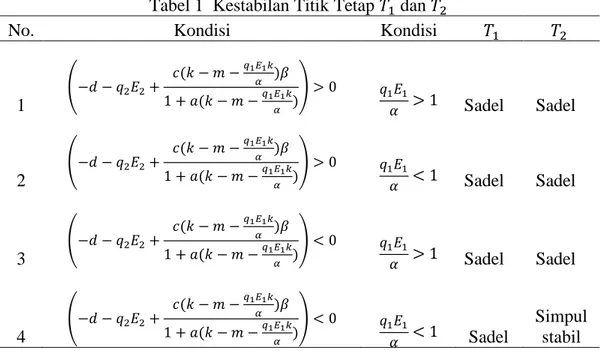
Jenis kestabilan titik tetap dari hasil pencarian titik tetap dengan beberapa kondisi yang berbeda:
Tabel 1 Kestabilan Titik Tetap dan
No. Kondisi Kondisi
1 ( ( ) ( )) Sadel Sadel 2 ( ( ) ( )) Sadel Sadel 3 ( ( ) ( )) Sadel Sadel 4 ( ( ) ( ))
12
Simulasi Dinamika Populasi Mangsa Pemangsa
Simulasi model mangsa pemangsa perlu dilakukan untuk melihat secara ringkas dinamika perubahan jumlah populasi mangsa pemangsa dalam kurun waktu tertentu, sebagaimana yang ditunjukkan oleh kurva bidang solusi.
Pada bagian simulasi ini, akan dilakukan uji coba beberapa kondisi yang mempengaruhi kestabilan model mangsa pemangsa yaitu dengan mengubah nilai parameter-parameter. Hal ini dilakukan unuk menggambarkan beberapa kasus jika terjadi pada kondisi yang terdapat pada Tabel 2 berikut ini:
Tabel 2 Nilai parameter
Simulasi
dengan parameter lain bernilai tetap dalam setiap simulasi yaitu: dan
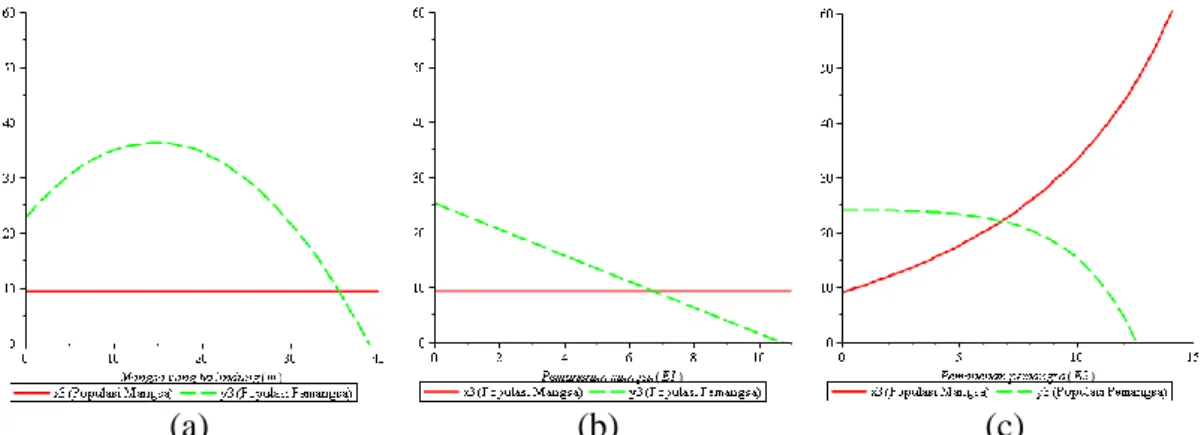
Pengaruh dan terhadap dan dapat dilihat pada gambar berikut ini:
(a) (b) (c)
Gambar 1 Pengaruh terhadap dan (a), pengaruh terhadap dan (b) dan pengaruh terhadap dan (c)
Pada Gambar 1 (a) saat nilai parameter lain tetap dan hanya nilai yang berubah, maka nilai yang berubah adalah Pada Gambar 1 (b), perubahan nilai menyebabkan perubahan populasi pemangsa pada titik tetap . Pada Gambar 1 (c) saat nilai parameter lain tetap dan hanya nilai yang berubah, maka nilai yang berubah adalah dan , artinya jumlah kedua populasi berubah pada titik tetap .
13 Dinamika Populasi Mangsa Pemangsa Akibat Mangsa yang Terlindung ( )
Pengaruh peningkatan mangsa yang terlindung akan diberikan pada simulasi dengan nilai sedangkan pada simulasi dengan nilai disertai dengan parameter dan untuk melihat perubahan yang terjadi terhadap kestabilan populasi mangsa. Titik tetap yang diperoleh saat dan dapat dilihat pada Tabel 3 berikut ini:
Tabel 3 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Spiral takstabil
Sedangkan titik tetap yang diperoleh saat dapat dilihat pada Tabel 4 berikut ini:
Tabel 4 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Spiral stabil
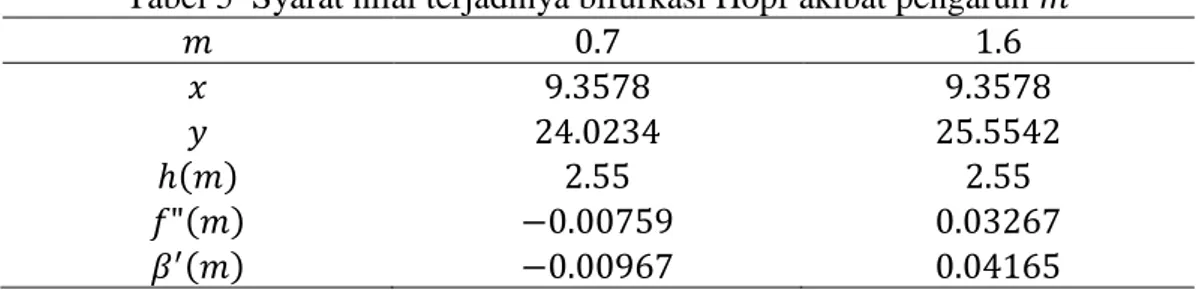
Ketika naik menjadi perubahan kestabilan terjadi pada titik tetap yang semula spiral takstabil menjadi spiral stabil. Perubahan ini menyebabkan terjadinya bifurkasi Hopf dengan kondisi yang ditunjukkan oleh Tabel 5 berikut ini:
Tabel 5 Syarat nilai terjadinya bifurkasi Hopf akibat pengaruh
( ) ( ) ( )
14
Berdasarkan nilai pada Tabel 5 dapat kita lihat bahwa ( ) ( ) dan ( )
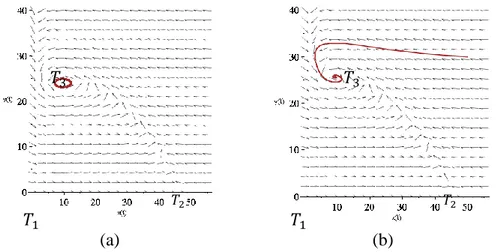
Gambar berikut ini adalah dinamika populasi mangsa pemangsa dalam bidang fase pada Tabel 3 dan Tabel 4.
(a) (b)
Gambar 2 Bidang fase saat (a) dan bidang fase saat (b) Gambar 2 (a) menunjukkan kurva bergerak secara spiral di sekitar titik yang bersifat takstabil sedangkan Gambar 2 (b) menunjukkan kurva bergerak secara spiral menuju titik . Limit cycle yang muncul karena adanya bifurkasi Hopf yang terjadi dalam kondisi ini. Kestabilan dinamika populasi mangsa-pemangsa dalam bidang solusi dapat dilihat pada gambar di bawah ini:
(a) (b)
Gambar 3 Bidang solusi saat (a) dan bidang solusi saat (b) Gambar 3 (a) menunjukkan saat jumlah mangsa yang terlindung meningkat terjadi ketidakstabilan untuk kedua jenis populasi. Menggunakan nilai awal ( ) dan ( ) untuk Gambar 3 (b) kestabilan populasi mangsa pemangsa terjadi pada titik .
Saat tingkat mangsa yang terlindung ditingkatkan lebih tinggi menjadi , maka pengaruhnya pada dinamika populasi mangsa pemangsa diberikan pada simulasi . Titik tetap dan kestabilannya dapat dilihat pada Tabel 6 berikut ini:
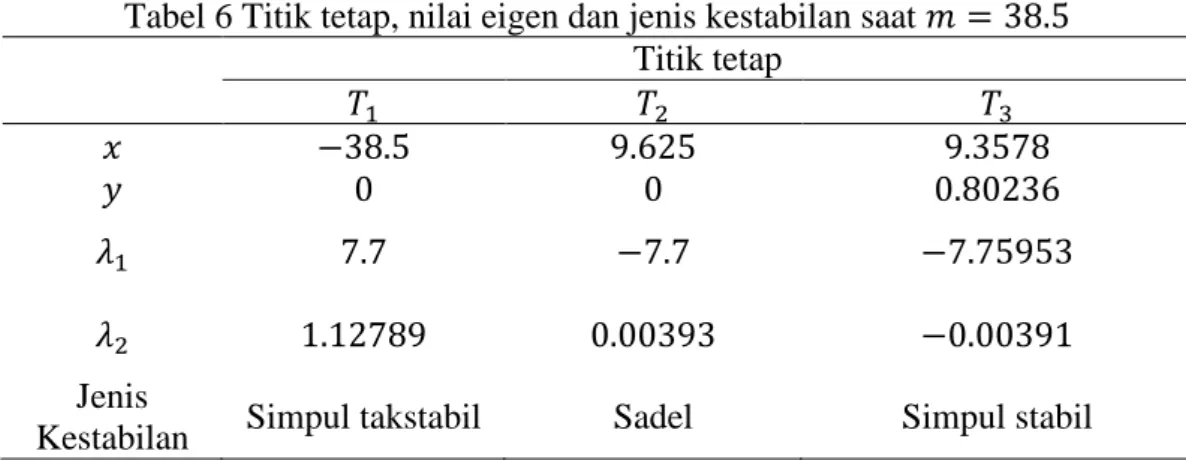
15 Tabel 6 Titik tetap, nilai eigen dan jenis kestabilan saat
Titik tetap Jenis
Kestabilan Simpul takstabil Sadel Simpul stabil
Pada kondisi ini titik tetap yang bersifat stabil yaitu titik tetap . Kestabilan dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi dapat dilihat pada gambar di bawah ini:
(a) (b)
Gambar 4 Bidang fase (a) dan bidang solusi saat (b)
Pada Gambar 4 (a) di atas, kurva menuju ke titik stabil . Gambar 4 (b) kurva menunjukkan kestabilan populasi mangsa pemangsa dengan nilai awal ( ) dan ( ) yang terjadi pada titik . Tingkat mangsa yang terlindung sangat besar mengakibatkan populasi mangsa tetap (tidak mengalami perubahan) tetapi populasi pemangsa menuju kepunahan saat spesies pemangsa kehilangan makanannya.
Sebaliknya, saat mangsa yang terlindung lebih kecil menjadi , maka pengaruhnya pada dinamika populasi mangsa pemangsa diberikan pada simulasi . Titik tetap dan kestabilannya dapat dilihat pada Tabel 7 berikut ini:
16
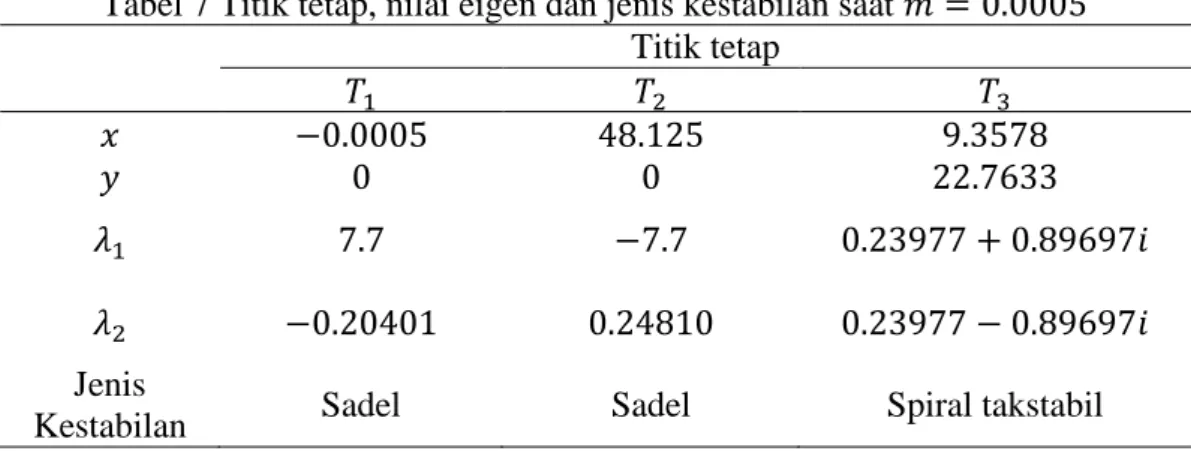
Tabel 7 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Spiral takstabil
Kestabilan sistem terjadi pada titik tetap artinya ketika mangsa yang terlindung menjadi maka dapat meningkatkan populasi pemangsa. Kestabilan dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi saat tingkat mangsa yang terlindung dapat dilihat pada gambar di bawah ini:
(a) (b)
Gambar 5 Bidang fase (a) dan bidang solusi saat (b)
Berdasarkan Gambar 5 (a) di atas, kurva secara spiral di sekitar yang bersifat takstabil sehingga terjadi ketidakstabilan untuk kedua populasi. Kurva warna hijau pada Gambar 5 (b) menunjukkan peningkatan pada populasi pemangsa yang terjadi karena spesies pemangsa masih mempunyai cukup makanan.
Dinamika Populasi Mangsa Pemangsa Akibat Usaha Pemanenan terhadap Mangsa ( )
Bifurkasi Hopf juga terjadi karena pemanenan pemangsa pada suatu nilai Pada simulasi , saat diketahui bahwa titik tetap bersifat spiral takstabil. Berikut ini adalah tabel 8 titik tetap simulasi dengan nilai .
17 Tabel 8 Titik tetap, nilai eigen dan jenis kestabilan saat
Titik tetap Jenis
Kestabilan Sadel Sadel Spiral stabil
Ketika naik menjadi perubahan kestabilan terjadi pada titik tetap yang semula spiral takstabil menjadi spiral stabil. Perubahan ini menyebabkan terjadinya bifurkasi Hopf dengan kondisi yang ditunjukkan oleh Tabel 9 berikut ini:
Tabel 9 Syarat nilai terjadinya bifurkasi Hopf akibat pengaruh
( ) ( ) ( )
Berdasarkan nilai pada Tabel 9 dapat kita lihat bahwa ( ) ( ) dan ( )
Gambar berikut ini adalah dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi pada Tabel 8.
(a) (b)
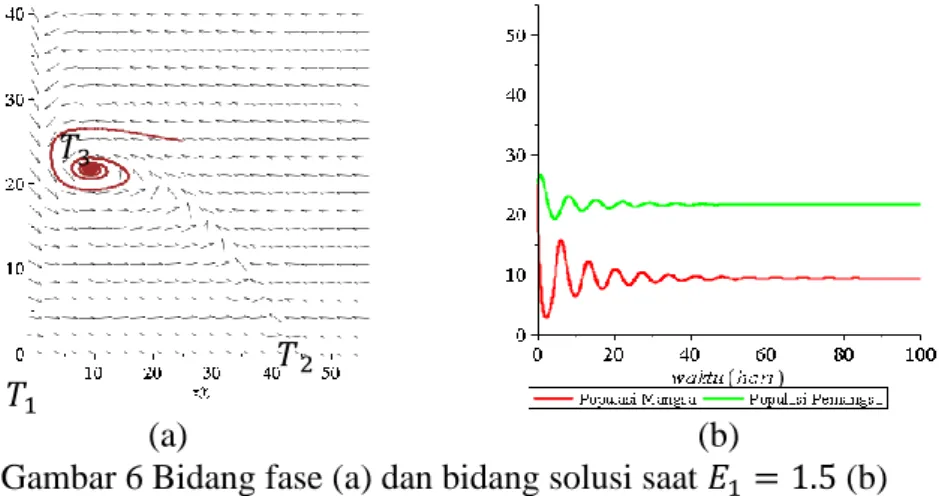
Gambar 6 Bidang fase (a) dan bidang solusi saat (b)
Gambar 6 (a) menunjukkan kurva bergerak secara spiral menuju titik yang bersifat stabil. Menggunakan nilai awal ( ) dan ( ) untuk Gambar 6 (b) kestabilan populasi mangsa pemangsa terjadi pada titik
18
Saat tingkat upaya pemanenan mangsa ( ) ditingkatkan menjadi , maka pengaruhnya pada dinamika populasi mangsa pemangsa diberikan dalam simulasi . Titik tetap dan kestabilannya dapat dilihat pada Tabel 10 berikut ini:
Tabel 10 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Simpul stabil
Titik tetap yng bersifat stabil pada kondisi ini adalah titik tetap , namun di titik tetap juga tidak mengalami perubahan (tetap). Dinamika populasi mangsa pemangsa saat dapat dilihat pada bidang fase dan bidang solusi di bawah ini:
(a) (b)
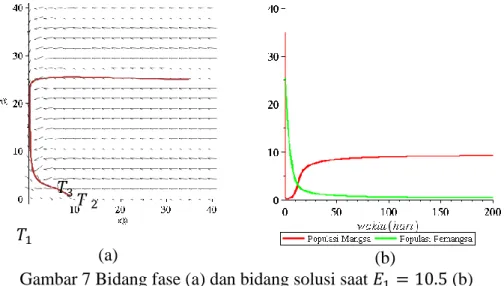
Gambar 7 Bidang fase (a) dan bidang solusi saat (b)
Pada Gambar 7 (a) di atas, kurva menuju ke titik stabil yaitu titik tetap . Gambar 7 (b) kurva menunjukkan kestabilan populasi mangsa pemangsa dengan nilai awal ( ) dan ( ) terjadi pada titik . Tingkat upaya pemanenan mangsa ( ) yang lebih besar mengakibatkan menurunkan populasi pemangsa bahkan kepunahan yang terjadi saat spesies pemangsa kehilangan makanannya.
Sebaliknya, saat pemanenan mangsa diperkecil menjadi , maka pengaruhnya pada dinamika populasi mangsa-pemangsa diberikan pada simulasi . Titik tetap dan kestabilannya dapat dilihat pada Tabel 11 berikut ini:
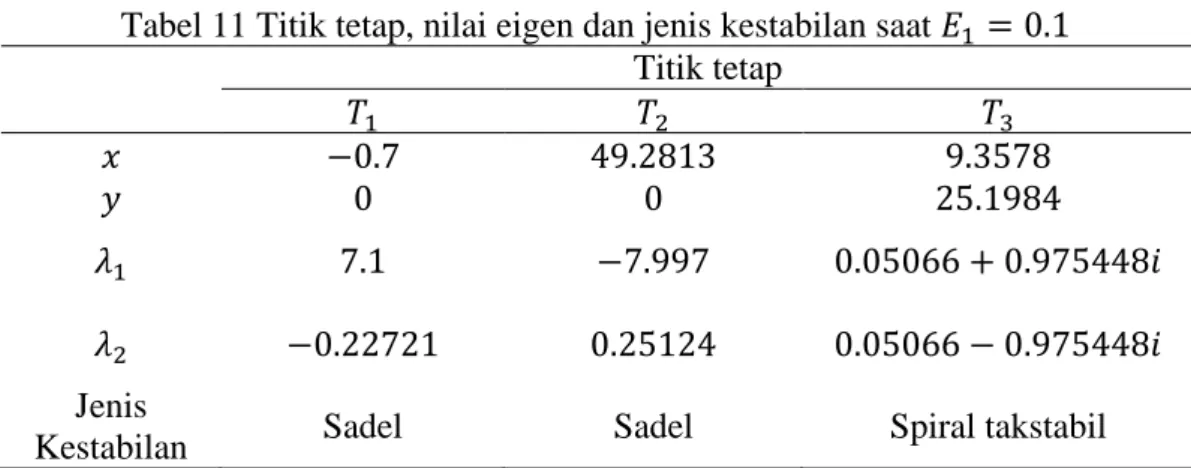
19 Tabel 11 Titik tetap, nilai eigen dan jenis kestabilan saat
Titik tetap Jenis
Kestabilan Sadel Sadel Spiral takstabil
Kestabilan sistem terjadi pada titik tetap artinya ketika pemanenan mangsa menjadi maka dapat meningkatkan populasi pemangsa. Kestabilan dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi saat tingkat pemanenan mangsa dapat dilihat pada gambar di bawah ini:
(a) (b)
Gambar 8 Bidang fase (a) dan bidang solusi saat (b)
Berdasarkan Gambar 8 (a) di atas, kurva secara spiral di sekitar yang bersifat takstabil sehingga terjadi ketidakstabilan untuk kedua populasi. Kurva warna hijau pada Gambar 8 (b) menunjukkan populasi pemangsa meningkat yang terjadi karena spesies pemangsa masih mempunyai cukup makanan.
Dinamika Populasi Mangsa Pemangsa Akibat Usaha Pemanenan terhadap Pemangsa ( )
Bifurkasi Hopf juga terjadi karena pemanenan pemangsa pada suatu nilai Pada simulasi , saat diketahui bahwa titik tetap bersifat spiral takstabil. Berikut ini adalah tabel 12 titik tetap simulasi dengan nilai .
20
Tabel 12 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Spiral stabil
Ketika naik menjadi perubahan kestabilan terjadi pada titik tetap yang semula spiral takstabil menjadi spiral stabil. Perubahan ini menyebabkan terjadinya bifurkasi Hopf dengan kondisi yang ditunjukkan oleh Tabel 13 berikut ini:
Tabel 13 Syarat nilai terjadinya bifurkasi Hopf akibat pengaruh
( ) ( ) ( )
Berdasarkan nilai pada Tabel 13 dapat kita lihat bahwa ( ) ( ) dan ( )
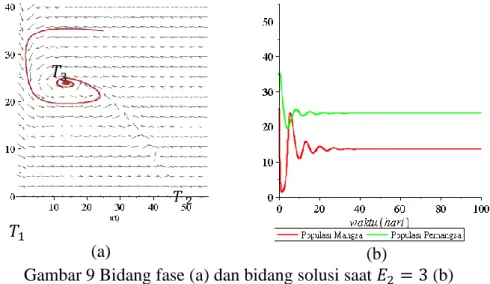
Gambar berikut ini adalah dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi pada Tabel 12.
(a) (b)
Gambar 9 Bidang fase (a) dan bidang solusi saat (b)
Gambar 9 (a) menunjukkan kurva bergerak secara spiral di menuju titik yang bersifat stabil. Menggunakan nilai awal ( ) dan ( ) untuk
21 Gambar 9 (b) kestabilan populasi mangsa pemangsa terjadi pada titik
Saat pemanenan pemangsa ditingkatkan menjadi maka pengaruhnya pada dinamika populasi mangsa pemangsa diberikan pada simulasi . Titik tetap dan kestabilannya dapat dilihat pada Tabel 14 berikut ini:
Tabel 14 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Simpul stabil
Titik tetap bersifat stabil pada kondisi ini adalah titik tetap , Kestabilan dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi dapat dilihat pada gambar di bawah ini:
(a) (b)
Gambar 10 Bidang fase (a) dan bidang solusi saat (b)
Pada Gambar 10 (a) di atas, kurva menuju ke titik stabil . Gambar 10 (b) kurva menunjukkan kestabilan populasi mangsa pemangsa dengan nilai awal ( ) dan ( ) yang terjadi pada titik . Tingkat pemanenan pemangsa lebih besar membuat populasi pemangsa menurun menuju kepunahan sedangkan populasi mangsa meningkat menuju kestabilan.
Sebaliknya, saat pemanenan pemangsa lebih kecil menjadi maka pengaruhnya pada dinamika populasi mangsa pemangsa diberikan pada simulasi . Titik tetap dan kestabilannya dapat dilihat pada Tabel 15 berikut ini:
22
Tabel 15 Titik tetap, nilai eigen dan jenis kestabilan saat Titik tetap Jenis
Kestabilan Sadel Sadel Spiral takstabil
Kestabilan sistem terjadi pada titik tetap artinya ketika pemanenan pemangsa menjadi maka dapat meningkatkan populasi pemangsa. Kestabilan dinamika populasi mangsa pemangsa dalam bidang fase dan bidang solusi saat pemanenan pemangsa dapat dilihat pada gambar di bawah ini:
(a) (b)
Gambar 11 Bidang fase (a) dan bidang solusi saat (b)
Berdasarkan Gambar 11 (a) di atas, kurva secara spiral di sekitar yang bersifat takstabil, sehingga menyebabkan kedua populasi setiap waktu mengalami osilasi seperti yang terlihat pada Gambar 11 (b). Limit cycle yang muncul akibat adanya bifurkasi Hopf dalam kondisi ini. Kurva warna hijau menunjukkan peningkatan pada populasi pemangsa yang terjadi karena spesies pemangsa masih mempunyai cukup makanan.
Untuk lebih mudah membandingkan pengaruh mangsa yang terlindung, usaha pemanenan mangsa dan usaha pemanenan pemangsa, berikut ini tabel yang menunjukkan kestabilan titik tetap untuk semua simulasi di atas:
23 Tabel 16 Kestabilan titik tetap pada masing-masing simulasi
Simulasi Ke-
Sadel Sadel Spiral takstabil
Sadel Sadel Spiral stabil
Simpul takstabil Sadel Simpul stabil
Sadel Sadel Spiral takstabil
Sadel Sadel Spiral stabil
Sadel Sadel Simpul stabil
Sadel Sadel Spiral takstabil
Sadel Sadel Spiral stabil
Sadel Sadel Simpul stabil
Sadel Sadel Spiral takstabil
SIMPULAN
Mangsa yang terlindung dan adanya usaha pemanenan populasi memengaruhi kestabilan dinamika interaksi mangsa pemangsa serta menyebabkan terjadinya bifurkasi Hopf pada model mangsa pemangsa Holling-Tanner tipe II.
Semakin kecil mangsa yang terlindungi mengakibatkan populasi pemangsa meningkat tidak stabil. Sebaliknya, semakin tinggi mangsa yang terlindungi mengakibatkan populasi pemangsa menuju kepunahan dan populasi mangsa stabil. Hal ini terjadi pula pada dinamika populasi akibat usaha pemanenan mangsa. Sedangkan pada usaha pemanenan pemangsa, semakin kecil pemanenan pemangsa mengakibatkan populasi pemangsa meningkat tidak stabil. Semakin tinggi tingkat pemanenan pemangsa mengakibatkan populasi pemangsa punah dan populasi mangsa meningkat stabil.
Dalam model ini, diperoleh tiga titik tetap. Kestabilan titik tetap pertama dapat bersifat sadel dan simpul takstabil, sedangkan kestabilan titik tetap kedua selalu bersifat sadel. Kestabilan titik tetap ketiga dapat bersifat spiral takstabil, spiral stabil dan simpul stabil bergantung dari parameter mangsa yang terlindung dan pemanenan populasi. Bifurkasi tepat terjadi pada titik tetap ketiga.
24
DAFTAR PUSTAKA
Anton H, Rorres C. 2004. Aljabar Linear Elementer. Ed ke-5. Pantur S, I Nyoman S, Penerjemah. Jakarta (ID): Erlangga.
Das U, Kar TK, Pahari UK. 2013. Global dynamics of an exploited prey-predator model with constant prey refuge. ISRN Biomathematics. Hindawi Publishing
Corporation. dx.doi.org/10.1155/2013/637640.
Edelstein-Keshet L. 1988. Mathematical Models in Biology. New York (US): Random House.
Farlow SJ. 1994. An Introduction to Differential Equation and Their Application. Mc Graw-Hill, New York.
Gasull A, Kooij RE, Torregrosa J. 1997. Limit cycles in the Holling-Tanner model. Public Math. 41:149-167.
Gonzalez-Olivares E, Ramos-Jiliberto R. 2003. Dynamics consequences of prey refuges in a simple model system: more prey, fewer predators and enhanced stability. Ecological Modeling. 166:135-146.
Ji L, Wu C. 2010. Qualitative analysis of a predator-prey model with constant-rate prey harvesting incorporating a constant prey refuge. Nonlinear Analysis: Real
World Applications. 11:2285-2295.
Strogatz SH. 1994. Nonlinear Dynamic and Chaos, with Application to Physics,
Biology, Chemistry, and Engineering. New York (US): Addison-Wesley
Publishing Company, Reading, Massachusetts.
Tu PNV. 1994. Dynamical System, An Introduction with Application in
Economics and Biology. Heidelberg (DE): Springer-Verlag.
Verhulst F. 1990. Nonlinear Differensial Equation and Dynamical System. New York (US): Springer-Verlag.
Wang J, Shi J, Wei J. 2011. Predator-prey system with strong alle effect in prey.
25
LAMPIRAN
Lampiran 1 Penentuan Titik Tetap Model
Titik tetap persamaan (8) didapatkan dari
dan
sehingga diperoleh persamaan (8) menjadi:
( ) ( )
( ) (9)
(10)
Titik tetap dapat ditentukan dengan program berikut ini: , - * ( )( ) ( ) +, menghasilkan * ( ) ( )( ) +. Lalu , , , - * + * +--, menghasilkan ** + * + * 0 ( )( ( ) ) ( ( ( ) )( ( )( ( ) ) )1+. Dengan menyelesaikan sistem persamaan (9) dan (10), diperoleh 3 titik tetap, yaitu ( ) ( ) ( ) dengan: ( ( )( ) ( ))
Untuk mendapatkan hasil yang lebih sederhana maka melakukan langkah sebagai berikut:
26
1. Pada titik tetap , harus difaktorkan dengan program berikut ini: 0 ( )( ( ) ) ( ( ( ) )( ( )( ( ) ) )1, menghasilkan ( ( ) ( )) ( ( )( ) , dapat ditulis menjadi
( )( ) ( ( )( )). 2. Penjabaran hasil , buat menjadi dua persamaan:
i.
( )( ) ( )( ),
ii. ( ( ))( ( ( )) ( ) ( )) ( ). 3. Pemisalan dan . di mana , , , ( ), ( ), ( ).4. Subtitusikan, sehingga persamaan (i) menjadi: ( ) ( ) ( ) ( ) ( ) ( )
27 Dan persamaan (ii) menjadi:
( )( ( )) ).
5. Persamaan (i) dan (ii) digabung untuk mendapatkan hasil yang lebih sederhana: ( ( )( )) ( ( )) ( ) ( ( ) ( )) ( ( ( ) ) ( )) ( ( ( ) ) ( )) ( ( )( ) ( )) sehingga diperoleh hasil
( ( )( ) ( )). Jadi, dapat dituliskan titik tetap ( ) seperti berikut ini, di mana
,
( ( )( ) ( ))
Dengan melakukan pelinearan pada persamaan (8), matriks Jacobi dapat ditentukan dengan program berikut ini:
, ,* ( )( ) ( ) + ** ++-- , menghasilkan ( ( )( ) (( ) ) ( ) ( ) ).
28
Lampiran 2 Penentuan Nilai Eigen Model
Nilai eigen dari titik tetap dapat ditentukan dengan program berikut ini:
, ,( )-- , menghasilkan
(
).
Nilai eigen dari titik tetap dapat ditentukan dengan program berikut ini: , ( ( . /) ( . /) . / ( . /) . / . / . / . /)) -- , menghasilkan ( ( ) ).
Pelinearan dan nilai eigen dari titik tetap dapat diperoleh matriks Jacobi sebagai berikut: 0 1. dengan ( )( ) (( ) ) ( ) , , ( ) ,
;
. / , ( )29 .
Lalu subtitusikan sehingga diperoleh matriks Jacobi dari nilai λ titik tetap sebagai berikut: | | * ( )( ) (( ) ) ( ) ( ) + , ( ( )( ) (( ) ) ( ) ) ( ) ( ) ( ( ) ) ( ( ) ) ( ) . / dengan ( ) , ( ) .
Sehingga menurut kriteria teorema Routh-Hurwitz Criteria titik tetap akan stabil jika memenuhi kondisi:
dan Maka
. ( ) /,
( ) ,
( )
( )
kondisi ini sudah terpenuhi karena dan
bernilai positif.
Lampiran 3 Kode program Gambar 1
30
Gambar (b)
Gambar (c)
Lampiran 4 Kode program Gambar 2
31
Gambar (b)
Lampiran 5 Kode program Gambar 3
32
Gambar (b)
Lampiran 6 Kode program Gambar 4
Gambar (a)
33 Lampiran 7 Kode program Gambar 5
Gambar (a)
Gambar (b)
Lampiran 8 Kode program Gambar 6
34
Gambar (b)
Lampiran 9 Kode program Gambar 7
Gambar (a)
Gambar (b)
35
Gambar (a)
Gambar (b)
Lampiran 11 Kode program Gambar 9
Gambar (a)
36
Lampiran 12 Kode program Gambar 10
Gambar (a)
Gambar (b)
37 Gambar (a)
38
RIWAYAT HIDUP
Penulis dilahirkan di Sragen (Jawa Tengah) pada tanggal 15 Februari 1992 dari Bapak Suradi dan Ibu Lasmi sebagai anak kedua dari tiga bersaudara. Penulis menyelesaikan pendidikan Sekolah Dasar di SDN Jatipadang 04 Petang Jakarta pada tahun 2004, Sekolah Menengah Pertama di SMP SULUH Jakarta pada tahun 2007, Sekolah Menengah Atas di SMAN 60 Jakarta pada tahun 2010, dan pada tahun yang sama penulis lulus seleksi masuk Institut Pertanian Bogor melalui jalur Undangan Seleksi Masuk IPB (USMI) dan diterima di Departemen Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam. Penulis juga merupakan salah satu anggota penerima dana DIKTI pada Beasiswa Bidikmisi periode 2010/2014.
Selama mengikuti perkuliahan, penulis aktif dalam organisasi kampus, yaitu Gugus Mahasiswa Matematika (GUMATIKA). Tahun 2012/2013, penulis aktif sebagai Staf Divisi Informasi dan Komunikasi (INFOKOM) GUMATIKA. Selain itu, penulis juga terlibat dalam beberapa kegiatan, antara lain peserta ESQ Basic
Training IPB 2010, panitia G5 League Mathematics IPB 2011, panitia Opening Ceremony Semarak Bidikmisi IPB 2012 dan panitia IPB Mathematics Challenge