A2-55
Sistem Kendali pada Pendulum Terbalik Menggunakan
Feedback Error Learning
Saida Ulfa
Jurusan Teknologi Pendidikan, Universitas Negeri Malang Jl. Surabaya 6 Malang 65145 Indonesia
Email: [email protected]
Abstrak Pendulum terbalik merupakan salah satu contoh kasus sistem nonlinear yang sering
digunakan untuk menguji kehandalan sebuah sistem kendali. Posisi kesetimbangan pendulum ini berada pada posisi tegak berlawanan arah grafitasi. Untuk menjaga pendulum berada pada posisi kesetimbangannya, diperlukan sebuah sinyal kendali. Dalam makalah ini penulis menggunakan teknik kendali feedback error learning (FEL). Konsep FEL ini mengadopsi sistem kendali pada otak manusia. Teknik ini menggabungkan conventional feedback controller atau kendali umpan balik konfensional dan feedforward controller atau kendali umpan maju. Umpan maju yang digunakan disini, menggunakan model artificial neural network atau jaringan syaraf tiruan yang digunakan untuk menghitung inverse model atau model balikan dari pendulum terbalik.
Kata Kunci: Feedback error learning, neural network, system nonlinear, pendulum terbalik
1. Pendahuluan
Pendulum terbalik adalah pendulum yang yang titik beratnya berada diatas titik tumpunya sehingga mempunyai kesetimbangan yang labil. Untuk menjaga pendulum tetap berada pada posisi kesetimbangannya, pada makalah ini digunakan sebuah teknik kendali yang disebut Feedback Error
Learning (FEL).
Teknik FEL yang dikemukakan oleh Kawato [1,2] adalah penggabungan pembelajaran dan efesiensi kendali. Sistem kendali ini adalah
two degree of freedom (TDOF) control atau kendali
adaptif dua derajat kebebasan neural network
feedforward controller (NNFC) atau pengendali
umpan maju jaringan syaraf dan sebuah
conventional feedback controller (CFC) atau
kendali umpan balik konfensional. NNFC digunakan untuk memperoleh inverse model atau nilai balikan dari plant atau objek yang dikendalikan sedangkan CFC digunakan untuk menjamin kestabilan global asymptotic dan sebagai sinyal error untuk NNFC [3,4]. Jika inverse model diperoleh secara tepat, keluaran dari plant akan menghitung sinyal referensi dengan menggunakan umpan maju.
Sebuah sistem kendali dikatakan bagus
jika telah dicoba dan dievaluasi oleh beberapa teknik kendali yang berbeda, pada tulisan ini, penulis membandingkan hasil kendali FEL dengan CFC.
Pengujian dilakukan dengan menggunakan graphical user interface (GUI) pada komputer yang didisain menggunakan software Borland C++ Builder.
Garis besar dari makalah ini adalah: Pada bab 2 dibahas pemodelan pendulum terbalik secara fisik dan matematika. Inti dari system kendali FEL yang digunakan akan dijelaskan pada bab 3. Hasil pengujian dengan menggunakan FEL ditampilkan pada bab 4 dan bab 5 merupakan kesimpulan dari makalah ini.
2. Pemodelan Pendulum Terbalik
Sebuah sistem dikatakan nonlinear ketika karakteristik dari sistem tersebut menggunakan pemodelan matematika secara nonlinear. Pemodelan secara nonlinear digunakan untuk menjelaskan sifat dan pola dari sistem yang di modelkan.
2.1. Pemodelan Fisik
Sistem kendali terdiri atas sebuah plant atau objek yang dikendali, controller atau pengendali dan
trainer atau pelatih yang saling berhubungan
sehingga membentuk sebuah loop umpan balik. pengendali mempunyai parameter yang adaptif seperti pembobotan yang terdapat pada NNFC. NNFC akan memantau performa plant yang nilainya ditentukan oleh nilai umpan balik system sehingga mampu mengoptimasi pengendali yang bertindak sebagai pengendali adaptif.
Seperti yang terlihat pada Gambar 1, servo motor AC akan menjalankan kereta, sinyal kendali pada servo motor AC ini harus diberikan secara tepat karena akan mempengaruhi pergerakan kereta yang turut mempengaruhi posisi sudut θ
pendulum.
Untuk mempertahankan pendulum pada posisi tegak diperlukan sebuah control force f atau gaya yang diberikan ke kereta untuk membawa pendulum tersebut. Pendulum dikatakan berhasil distabilkan ketika sudut θ pendulum kecil atau
Pendulum dapat di kendalikan pada posisi tersebut dan membuat kereta berada pada posisi acuan (r = 0) dengan menggunakan kendali umpan balik untuk sistem linear. Akan tetapi, masalah akan timbul ketika muncul viscous friction force yang tidak diketahui antara rel dan kereta. Apalagi parameter
uncertain friction berubah bergantung pada arah
pergerakan kereta.
2.1 Pemodelan Matematika
Ketika parameter uncertain friction antara rel dan kereta diperhitungkan, diperoleh persamaan linear untuk pendulum terbalik sebagai berikut:
(M + m) + ml = f – friction term , (1) + = gθ (2)
dimana, r adalah kereta dari pusat rel, M dan m adalah massa kereta dan pendulum, 2l adalah panjang pendulum dan f adalah gaya yang diberikan kepada kereta yang berasal dari servo motor AC.
3. Disain Sistem Kendali FEL
Gambar 2 merupakan konsep dasar FEL yang terdiri atas: linear feedback controller K atas CFC,
plant P atau objek, adaptive nonlinear feedfarwad controller Q atau kendali umpan balik maju
nonlinear yang merupakan model balikan dari plant.
Feedback controller tidak hanya menjamin
kestabilan sistem tetapi yang terpenting adalah
fungsinya sebagai sebuah aproksimasi linear untuk inverse model dari plant. Fungsi dari
Feedfarward controller membuat nilai balikan dari plant dengan mengurangi feedback error. Pada
teori FEL ini, feedback error sebagai sebuah
teaching signal pada proses pembelajaran untuk
model balikan plant.
Tujuan dari pengendalian sistem secara umum adalah mengurangi nilai error e antara sinyal masukan r dan sinyal keluaran y.
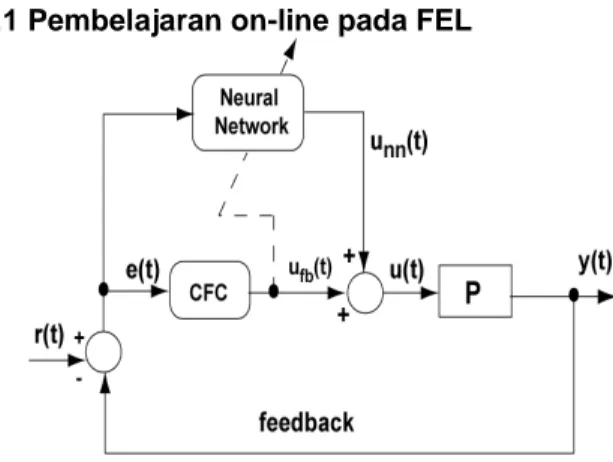
3.1 Pembelajaran on-line pada FEL
Gambar 3 merupakan skema FEL yang menggunakan jaringan syaraf sebagai feedfarward controller. Plant dikendalikan oleh CFC dan NNFC.
Pole placement regulator yang di adopsi dari CFC,
adalah
, (3) Dimana, nilai K = [ K1 K2 K3 K4] dan
x = [θ r ]. Feedback gain K berasal dari
persamaan (1) dengan mengabaikan istilah nonlinear dan persamaan (2). Parameter K diperoleh dengan menggunakan Matlab [6]:
K = [-5.6082 -5.3963 -0.8433 -2.4315]
(4)
Untuk memperbaiki kinerja CFC, NNFC bertindak sebagai adaptive controller. Neural
Network di update setiap satu kali putaran yang
bergantung pada waktu cuplik dari komputer. Setiap satu kali proses pembelajaran disebut
epoch. Waktu cuplik berkisar 20 ms yang
merupakan nilai standar untuk pengendalian pada pendulum terbalik.
Learning law berasal dari metode gradient descent dengan fungsi error [5] sebagai berikut:
(5) Dimana, = y merupakan nilai masukan untuk plant. Metode gradient descent
menghasilkan:
M
komput Servo amplifiθ
r
Vf
r
θ
2l, m
AC servo motor IGambar 3: Skema sistem kendali FEL
(6) Hasil untuk tuning rule:
(7) atau
(8) merupakan keluaran dari neural network yang akan dijelaskan lebih detail pada bagian selanjutnya. merupakan keluaran dari CFC yang digunakan untuk sinyal error untuk neural
network. w(t) adalah bobot neural network yang
berisi parameter yang tidak diketahui yang akan di update secara on-line pada setiap epoch.
Scaling factor (s.f) yang diberikan pada masukan neural network, hal ini dikarenakan nilai masukan sangat kecil sehingga nilai masukan di tambah sampai mendekati . Nilai ini berhubungan dengan nilai maksimum fungsi bipolar sigmoid sehingga membantu dalam proses pembelajaran
3.1 Jaringan syaraf Tiruan
Pada makalah ini, penulis menggunakan model jaringan syaraf tiruan berlapis banyak dengan empat lapisan seperti pada Gambar 4. Pemilihan jumlah neuron pada lapisan tersembunyi sangat menentukan kemampuan dari sebuah jaringan sayaraf tiruan. Akan tetapi dalam sebuah eksperimen, penulis tidak menemukan perbedaan hasil yang mendasar antara 20 neuron dan 10
neuron pada lapisan tersebunyi. Oleh karena itu,
untuk lapisan masukan digunakan 4 neuron, 2 lapisan tersembunyi yang masing-masing menggunakan 10 neuron dan 2 lapisan keluaran menggunakan masing-masing 1 neuron.
∑∑
∑
∑
= = = =
−
=
L k m j k i n i si h s js k jf
w
f
w
x
t
L
E
1 1 2 1 1 1 22
1
(9)Perhitungan bobot keluaran untuk lapisan tersembunyi :
∑
=−
=
∂
∂
L k k r k q qrz
L
W
E
1 21
δ
(10)(
) ( )
k q k q k q k qt
y
f
net
' 2 2=
−
δ
(11)Perhitungan lapisan masukan ke lapisan tersembunyi : 4 6 8 10 12 14 16 18 20 -6 -4 -2 0 2 4 6 8 A n g le [d e g ] Time[s]
∑
=−
=
∂
∂
L k k r k q qrx
L
W
E
1 11
δ
(12) dimana :( )
∑
==
m j k j jq k q k qf
net
w
1 2 ' ' 1 1δ
δ
(13)Untuk menghitung nilai bobot pada layar tersembunyi, error pada lapisan keluaran di propagasi balik menggunakan metode
backpropagation. Hasil dari propagasi balik akan
dibandingkan dengan sinyal target untuk memperoleh nilai mean square error. Proses ini di ulang untuk setiap sampel pada training set.
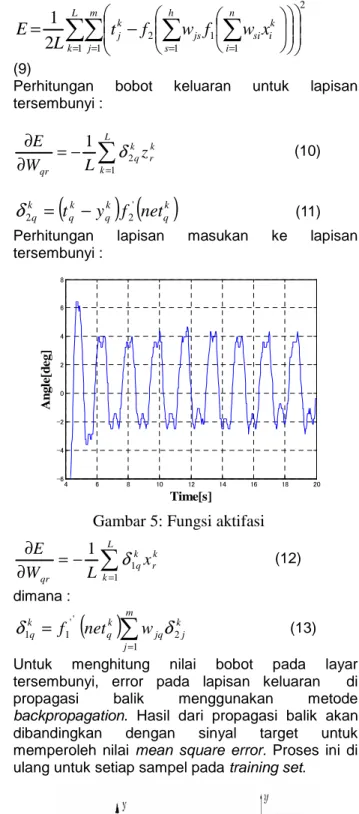
Fungsi aktifasi yang digunakan adalah fungsi sigmoid untuk lapisan tersembunyi dan fungsi linear untuk lapisan keluaran seperti pada Gambar 5.
Untuk proses pembelajaran secara on-line, jaringan syaraf di latih sebagai persiapan awal
Gambar 4: Jaringan syaraf tiruan dengan
banyak lapisan
Gambar 5: Fungsi aktifasi
sehingga mempunyai fungsi yang sama dengan CFC. Data yang digunakan adalah seperti yang tampak pada Gambar 6 dibawah ini.
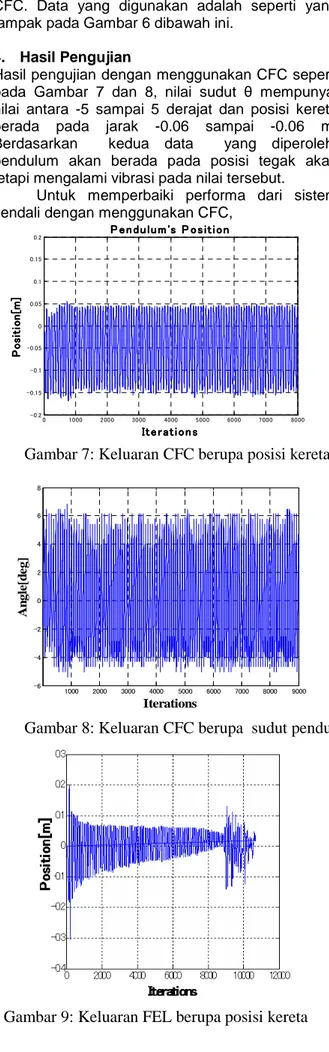
4. Hasil Pengujian
Hasil pengujian dengan menggunakan CFC seperti pada Gambar 7 dan 8, nilai sudut θ mempunyai
nilai antara -5 sampai 5 derajat dan posisi kereta berada pada jarak -0.06 sampai -0.06 m. Berdasarkan kedua data yang diperoleh, pendulum akan berada pada posisi tegak akan tetapi mengalami vibrasi pada nilai tersebut.
Untuk memperbaiki performa dari sistem kendali dengan menggunakan CFC,
0 1000 2000 3000 4000 5000 6000 7000 8000 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 P o s it io n [m ] P o s it io n [m ] P o s it io n [m ] P o s it io n [m ] It e r at i o n s It e r at i o n s It e r at i o n s It e r at i o n s P e n d u l u m 's P o s it i o n P e n d u l u m 's P o s it i o nP e n d u l u m 's P o s it i o n P e n d u l u m 's P o s it i o n 1000 2000 3000 4000 5000 6000 7000 8000 9000 -6 -4 -2 0 2 4 6 8 A n g le [d e g ] Iterations
FEL diterapkan untuk mencapai hasil yang maksimal seperti yang tampak pada Gambar Pada Gambar 9 dan 10 , tampak pada iterasi 8500 nilai sudut θ dan jarak kereta terhadap posisi acuan
mencapai stabil. Berdasarkan data ini, pendulum akan stabil pada posisi tegak tanpa mengalami vibrasi. Akan tetapi pada iterasi diatas 8500, kereta dan pendulum akan mengalami vibrasi lagi kemudian akan stabil pada iterasi diatas 10.500. Hal ini diakibatkan adanya gaya gesek antara rel dan kereta.
5. Kesimpulan
Konsep feedback error learning (FEL) mengadaptasi cara kerja motorik pada otak manusia. Pada sistem kendali, teknik FEL diaplikasikan pada sistem nonlinear. Dengan hanya menggunakan CFC, pendulum dapat berada pada posisi tegak namun tidak stabil pada posisi tersebut. Pendulum mengalami vibrasi: kereta akan bergerak pada jarak -0.06 sampai 0.06 meter dan sudut θ pendulum bergerak pada kisaran -5
sampai 5 derajat.
Nilai vibrasi kereta terhadap jarak acuan (r = 0) dan sudut θ pendulum dapat diperkecil hingga
mendekati nol dengan cara menggunakan konsep FEL, teknik ini menggabungkan feedback
controller atau kendali umpan balik dan feedforward controller atau kendali umpan maju.
Pada umpan maju digunakan jaringan syaraf tiruan untuk menghitung nilai model balikan dari objek yang dikendalikan.
Daftar Pustaka
[1] Kawato M., Furakawa K., Suzuki R., :“A Hierarchial Neural Network Models and Learning Voluntary Movements”, Biol., Cybernet. 57, pp. 169-185, 1987.
[2] Kawato M.,: “Feedback Error Learning Neural Network for Supervised Motor Learning”, Advanced Neural Computers/ R. Eckmiller (Ed), Neural Network for Sensory and Motor Systems, North-Holland, pp. 365-372, 1990
[3] Gomi H., Kawato M.,: “Neural Network Control for a Clossed-Loop System Using Feedback Error Learning” Neural Networks Vol. 6, pp. 933-946, 1993.
Gambar 10: Keluaran FEL berupa sudut pendulum
Gambar 9: Keluaran FEL berupa posisi kereta
Gambar 8: Keluaran CFC berupa sudut pendulum
Gambar 7: Keluaran CFC berupa posisi kereta
[4] Areolino et,al: “Feedback Error Learning for Controlling a Flexible Link”, Proc. Of the Sixth Brazilian Symposium on Neural Networks, IEEE, 2000.
[5] Miyamura A., Kimura H.,:”Stability of Feedback Error Learning Scheme", Systems & Control Letters, 45, pp.303-316,2002.
[6] Jinnai K.,: “A study of Double Inverted Pendulum System”, Master Thesis of Saga University, Faculty of Culture and Education, Technology Education Department, 2002.