Telah diuji pada
Tanggal : 19 Desember 2016
PANITIA PENGUJI TESIS
Ketua : Prof. Dr. Herman Mawengkang Anggota : 1. Dr. Esther Nababan, M.Sc
PERNYATAAN
OPTIMISASI DENGAN ADANYA BIG DATA PROBLEM
TESIS
Saya mengakui bahwa tesis ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing dituliskan sumbernya
Medan, 19 Desember 2016 Penulis,
ABSTRAK
Penelitian ini bertujuan menangani jumlah data yang banyak didalam permasala-han identifikasi keanggotaan. Sistem identifikasi digunakan dalam statistik untuk membentuk model matematika sistem dinamis dari suatu data. Didefinisikan is-tilah big data secara khusus yaitu big data akan ditunjukkan melalui banyaknya jumlah dari input-output data, kemudian data input-output dimodelkan, dari mo-del ini kemudian diselesaikan untuk memperoleh estimasi parameter yang optimal. Model diselesaikan dengan teori semidefinite programming (sdp). Contoh perhi-tungan disajikan.
Kata kunci : Optimisasi,Big data, Set-membership identification, Semidefinite programming.
ABSTRACT
This study is aimed at solving problem in big data membership identification. The identification system is used for statistics to form the mathematic model of a data dynamic system. The big data in this study is the big data that is represented through the quantity of input-output data, then the input-output data is modelled and from this model the solution is given by estimating the optimal parameter. The model is done by semidefinite programming (sdp) theory. The example of the model is given.
KATA PENGANTAR
Puji Syukur kehadirat Allah SWT yang selalu memberikan rahmat dan hi-dayahNYA sehingga penulis dapat menyelesaikan tesis yang berjudul ”OPTI-MISASI DENGAN ADANYA BIG DATA PROBLEM”. Tesis ini meru-pakan salah satu syarat untuk menyelesaikan studi pada Program Studi Magister Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam (FMIPA) Univer-sitas Sumatera Utara.
Pada kesempatan ini, penulis ingin menyampaikan terimakasih kepada: Prof. Dr. Runtung Sitepu, M. Hum selaku Pejabat Rektor Universitas Sumatera Utara.
Dr. Kerista Sebayang, M.S selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam (FMIPA) Universitas Sumatera Utara.
Prof. Dr. Saib Suwilo, M.Scselaku Sekretaris Program Studi Magister Mate-matika FMIPA USU.
Prof. Dr. Herman Mawengkang selaku Pembimbing I yang telah banyak memberikan bimbingan, arahan serta motivasi kepada penulis dalam penulisan tesis ini.
Dr. Esther Nababan, M.Sc selaku Pembimbing II yang telah banyak mem-berikan bimbingan, arahan serta motivasi kepada penulis dalam penulisan tesis ini.
Prof. Dr. Opim Salim S, M.Sc selaku Pembanding I yang telah banyak memberikan saran dan masukan kepada penulis dalam penulisan tesis ini.
Dr. Open Darnius, M.Scselaku Pembanding II yang telah banyak memberikan saran dan masukan kepada penulis dalam penulisan tesis ini.
Kak Misiani, S.Siselaku Staf Administrasi Program Studi Magister Matematika FMIPA USU yang telah banyak memberikan pelayanan yang baik kepada penulis selama mengikuti perkuliahan.
Seluruh Staf Pengajarpada Program Studi Magister Matematika FMIPA USU yang telah banyak memberikan ilmu pengetahuan selama masa perkuliahan. IbundaAlm. Chalisaturrahmydan AyahandaAlm. Firdaus, sosok orang tua yang mencurahkan seluruh kasih sayang dan dukungan kepada penulis. Orang tua yang dikagumi dan dicintai, yang telah memberi tauladan, membimbing, menga-jarkan kesabaran, kerendahan hati dan selalu bersyukur dalam menghadapi kehidu-pan ini, serta senantiasa memanjatkan doa yang tulus dan ikhlas bagi keberhasilan anak-anaknya.
Saudara terkasih Kakanda Nasfi Firdaus, S.H, M.H ,Kakanda Fatnita Sari Firdaus, S.P dan Abangda Afadlis Firdaus, S.E terima kasih telah menjadi saudara yang penuh cinta, perhatian dan kasih sayang.
Sahabat-sahabat teristimewa Mahasiswa Program Studi Magister Matema-tika FMIPA USU tahun 2014 genap (Bang Rizky, Bang Hasrul, Kak Dewi, Herlin, Mimmy, Nissa, Putri, Ismi, Lolita) yang telah sama berjuang dari awal hingga akhir, semoga persahabatan kita tak lekang oleh waktu.
Penulis menyadari bahwa tesis ini masih jauh dari sempurna, untuk itu penulis mengharapkan kritik saran untuk penyempurnaan tesis ini. Semoga tesis ini dapat bermanfaat bagi pembaca dan pihak-pihak lain yang memerlukannya. Terima kasih.
Medan, 19 Desember 2016 Penulis,
Muhammad Huda Firdaus
RIWAYAT HIDUP
DAFTAR ISI
Halaman
PERNYATAAN i
ABSTRAK ii
ABSTRACT iii
KATA PENGANTAR iv
RIWAYAT HIDUP vii
DAFTAR ISI viii
DAFTAR TABEL x
DAFTAR GAMBAR xi
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Tujuan Penelitian 2
1.4 Manfaat Penelitian 2
1.5 Metodologi Penelitian 2
BAB 2 BIG DATA DAN TEORI KONTROL 4
2.1 Big Data 4
2.1.1 Sejarah big data 4
2.1.2 Defenisi big data 5
2.2 Teori Kontrol 6
2.2.1 Sistem kontrol loopterbuka dan looptertutup 7 2.2.2 Kontrol analog dan diskrit 8 2.2.3 Kontrol konvensional/klasik dan modern 12
2.3 Peramalan 14
2.4 Teori Time Series 15
2.4.1 Sistem identifikasi 17
2.4.2 Penaksiran parameter 22
2.4.3 Transfer fungsi/fungsi alih/fungsi rasional 23 BAB 3 SEMIDEFINITE PROGRAMMING (SDP) 26
3.1 Definisi SDP 26
BAB 4 PEMBAHASAN DAN HASIL 29
4.1 Set-membership Identifiation/Estimation dan Big Data 29 4.2 Penanganan Big Data di Set-membership Identification dengan
Taksiran Optimisasi Polinomial 32
4.3 Penanganan Big Data di Set-membership Identification dengan
Reducing Ukuran Persoalan 34
4.4 Contoh Penanganan Big Data 35
BAB 5 KESIMPULAN DAN SARAN 38
5.1 Kesimpulan 38
5.2 Saran 38
DAFTAR TABEL
Nomor Judul Halaman
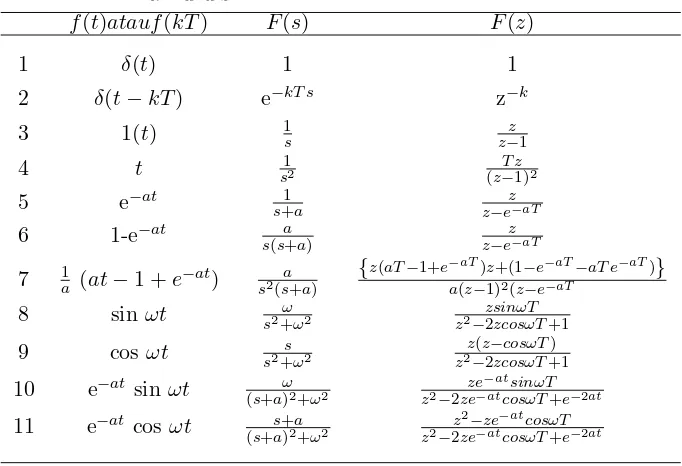
2.1 Transformasi Z merupakan salah satu model representasi dari
sis-tem SISO waktu diskrit 9
4.1 Perkiraan parameter utama (θcs j , θ
c,δ
j ) dan batasan tak tentu (∆θjs,∆θjδ)
terhadap banyak data N. Nilai dari θc,δj dan ∆θδ
j di hitung untuk
relaxation tingkat δ= 2 untuk N = 30, N = 200 dan N = 1000 36 4.2 Perkiraan parameter utama (θcs
j , θ c,δ
j ) dan batasan tak tentu (∆θjs,∆θjδ)
terhadap banyak data N. Nilai dari θjc,δ dan ∆θδ
j di hitung untuk
relaxation tingkat δ= 2 untuk N=300 37
DAFTAR GAMBAR
Nomor Judul Halaman
2.1 Diagram blok sistem kontrol loopterbuka 7 2.2 Diagram blok sistem kontrol looptertutup 8 2.3 Sinyal kontinyu dan sinyalsampling 8 2.4 Sinyal waktu diskrit dan sinyal waktu kontinyu 9 2.5 Contoh diagram blok looptertutup 25 4.1 Pengaturan dasar error in variable(EIV) untuk sistem dinamis
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Sistem identifikasi/estimasi digunakan dalam Teknik kontrol dengan permasala-han membuat pemodelan matematika dari sistem dinamis, sekumpulan data dan beberapa informasi tersebut yang akan diidentifikasi untuk selanjutnya dimodel-kan. Suatu data berisi rata-rata prosedur pengukuran dari data yang tidak di-tentukan. Karena data tidak ditentukan maka yang menjadi persoalan adalah menaksir data tersebut agar diperoleh model matematika, cara yang dapat di-lakukan untuk data yang tidak ditentukan adalah menentukan data tersebut dan membuatnya menjadi data yang jumlahnya besar. Walaupun diketahui bahwa mengumpulkan data/informasi merupakan persoalan dasar untuk memodelkan. Dengan estimasi/perkiraan, suatu kumpulan data yang banyak masih tidak dapat diselesaikan melalui cara komputer. Kata kunci big data muncul menjadi suatu permasalahn terbaru, yang terdiri dari sekumpulan data yang besar dan komplek dan sulit untuk diproses dan diidentifikasi.
Hasil yang ada pada teori estimasi/taksiran yang didasarkan pada teori statis-tik dari data yang tidak ditentukan dapat mempengaruhi suatu data. Suatu cara yang bermanfaaat dari teori estimasi dengan menggunaka dasar stokastik yang dapat digunakan pada persoalan big data diberi nama karakteristikbounded-error atau set-membership dimana ukuran errors dianggap tidak diketahui tetapi di-batasi, yaitu ukuran yang tidak tertentu diasumsikan milik set yang dibatasi. Seperti gambaran yang di ceritakan diatas dimana informasi statistik sebelumya belum tersedia atau errors adalah karakteristik di dalam deterministik (sebagai contoh sistematik dan kelas errors didalam ukuran suatu perlengkapan, rentetan dan memotong errorspada peralatan digital).
Berdasarkan tidak diketahui tetapi dibatasi dari suatu data yang tidak diten-tukan, adalah suatu paradigma baru yang dapat disebut bounded-error atau
2
membershipestimasi telah di mulai menjadi suatu pekerjaan untuk di bahas pada seminar oleh (Schweppe, 1968). Setelah menangani big data peroblem melalui set-membership estimationdibutuhkan sutu metode atau cara untuk menoptimisasikan model matematika tersebut nantinya. Disini diambil metode SDP (semidefinite programming), sdp merupakan bagian dari teori konvek optimisasi.
Oleh karena bigdata maka menjadi suatu persoalan bagaimana mengolahnya terlebih dahulu, maka (Cerone dan Regruto, 2015) telah membahas bagaimana menanganibig data problem denganset-membership estimationmelalui optimisasi dengan metodeSemidefinite Programming(SDP).
1.2 Perumusan Masalah
Perumusan masalah penelitian ini adalah untuk membentuk model matematika sistem dinamis dari suatu data (bigdata) dan bagaimana menaksir parameter dari model yang telah dibentuk agar diperoleh hasil yang optimal.
1.3 Tujuan Penelitian
Tujuan penelitian ini adalah mendeskripsikan set-membership identification un-tukbig data problem selanjutnya memaparkan metode Semidefinite Programming (SDP) sebagai suatu cara untuk melakukan optimisasi.
1.4 Manfaat Penelitian
Penelitian ini diharapkan menambah wawasan pengetahuan dalam dibidang ma-tematika, khususnya yang berkaitan dengan penanganan big data problem melalui set-membership identification dan melakukan optimisasi dengan metode Semidefi-nite Programming(SDP).
1.5 Metodologi Penelitian
3
serta metode Semidefinite Programming (SDP), sedangkan prosedur yang digu-nakan adalah sebagai berikut :
1. Bigdata secara khusus merupakan banyaknya input-output data;
2. Penanganan Masalahbigdata didalam identifikasi/estimasi keanggotaan, yang selanjutnya akan membentuk suatu model matematika;
3. Model kemudian dibuat ke model transfer fungsi;
4. Model transfer fungsi akan menjadi model polinomial optimisasi;
BAB 2
BIG DATA DAN TEORI KONTROL
Pada bab ini penulis akan memaparkan materi-materi yang berhubungan de-ngan big data dan teori kontrol. Materi tersebut akan dijadikan sebagai landasan berpikir dalam penelitian ini, sehingga mempermudah dalam hal pembahasan hasil utama pada bab selanjutnya.
2.1 Big Data
2.1.1 Sejarah big data
Istilahbigdata sudah dibesarkan oleh Fremont Rider, seorang Amerika Pustakawan dari Westleyan University, pada tahun 1944. Dia memperkirakan bahwa volume koleksi universitas di Amerika akan mencapai 200 juta kopi di tahun 2040.
Arus data dan informasi tumbuh signifikan dalam ukuran jumlah dan me-dia yang bervariasi, yang kemume-dian disebut sebagai big data. Pengguna big data misalnya, jaringan sosial media Facebook pada tahun 2012 memiliki jumlah peng-guna mencapai 1 miliar pengpeng-guna, dan menangani 350 juta unggahan foto, 4,5 miliarlikedan 10 miliar pesan setiap hari. Artinya bahwa jejaring sosial media ini menyimpan data lebih dari 100 pertabytes untuk kebutuhan analitiknya. Menurut Sugiarsono pada tahun 2015 penyedia jaringan sosial media yang lain yaitu Twit-ter pada tahun 2014 penggunanya mencapai 500 juta dengan 284 juta pengguna aktif dan setiap hari menangani 1.6 miliarsearch query. Youtube pada tahun 2013 digunakan oleh 1 milyar pengguna, Mesin pencari (search engine) Google mem-publikasikan data bahwa pada bulan April 2014 Google Inc mencatat sekitar 100 miliarquery/pencarian per bulan.
5
contoh pustakawan sebagai pekerja di bidang informasi perlu menangkap peluang melimpahnya data untuk dikelola, dan juga pustakawan perlu untuk melakukan transformasi dan meningkatkan daya saing untuk menjawab tantangan yang di-hadapi tentang pertumbuhan data yang terus meningkat (big data).
Big data pertama kali disebut dalam sebuah artikel ilmiah berjudul Appli-cation controlled demand paging for out-of-core visualization, yang ditulis oleh Michael Cox dan David Ellsworth tahun 1997. Persoalan yang muncul menge-nai big data dinyatakan dalam rumusan berikut, hal yang utama adalah terda-pat pertumbuhan data dan informasi yang sangat eksponensial, keceterda-patan dalam pertambahannya dan semakin bervariasinya data tersebut yang dikemudian hari menciptakan tantangan baru bagi yang tidak hanya tantangan dalam pengelo-laan sejumlah besar data yang heterogen, tetapi juga bagaimana untuk mema-hami semua data tersebut. Didalam lingkungan organisasi juga mulai tumbuh sejumlah pegawai/staf yang secara spesifik mendapat sebutan sebagai analis bis-nis/data analis/ilmuwan data yang dalam aktifitas bekerjanya memanfaatkan per-alatan yang modern, melakukan praktek dan mencari solusi dari suatu data. 2.1.2 Defenisi big data
Istilah big data telah digunakan sejak tahun 1990-an, dengan memberikan kredit kepada Jhon Mashey. Big data biasaya mencakup set data dengan uku-ran diluar kemampuan peuku-rangkat lunak yang biasa digunakan untuk menangkap, mengelola, dan memproses data dalam waktu yang telah berlalu toleransi. Big data (ukuran) adalah target terus bergerak, seperti 2012 mulai dari beberapa lusin terabyte banyak petabyte data. Data besar membutuhkan seperangkat teknik dan teknologi dengan bentuk-bentuk baru dari integrasi untuk mengungkapkan wawasan dari data set yang beragam, kompleks, dan skala besar.
diper-6
luas untuk karakter pelengkap lainnya dari data besar. karakter-karakter big data antara lain:
1. Volumeadalah data besar bukan sampel yang hanya melacak dan mengamati apa yang terjadi;
2. Velocyadalah data besar sering tersedia secara real time;
3. Varietyadalah data besar menarik dari teks, gambar, audio dan video dita-mbah bahagian yg hilang melalui fungsi data.
Pertumbuhanbig data menggambarkan konsep lebih sebenarnya dengan me-lukiskan perbedaan antara big data pada business intelligence. Business intelli-gence menggunakan big data menggunakan statistik deskriptif dengan data yang kepadatan tinggi informasi untuk mengukur hal, mendeteksitrend sampel sedang-kan big data menggunakan statistik induktif dan konsep sistem non-linier identi-fikasi untuk menyimpulkan hukum (regresi, hubungan non-linier dan efek kausal) dari set data yang besar dengan kepadatan informasi rendah, untuk mengungkap-kan hubungan dan ketergantungan atau untuk melakumengungkap-kan pediksi hasil dan peri-laku.
Jadi big data yang dibicarakan pada penelitian ini adalah pada business in-telligence dengan menggunakan statistik induktif.
2.2 Teori Kontrol
7
tetap atau nilainya berubah. Untuk melakukan proses tersebut dapat dirancang pengendali/controlleryang memonitoroutputdan membandingkan dengan referen-si. Perbedaan antara output actual dan yang diinginkan, disebut kesalahan sinyal, diterapkan sebagai umpan balik keinputdari sistem, untuk membawaoutput actu-al lebih dekat dengan referensi. Topik yang dibahas pada teori kontrol antara lain stabilitas, pengendalian dan pengamatan.
2.2.1 Sistem kontrol loop terbuka dan loop tertutup
Pada dasarnya, sistem kontrol dikategorikan menjadi 2, yakni sistem kon-trol loop terbuka dan sistem kontrol looptertutup. Masing-masing sistem kontrol tersebut dijelaskan berikut ini:
1. Sistem Kontrol LoopTerbuka
Suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak diumpan balik (feedback) ke parameter pengendalian.
Gambar 2.1 Diagram blok sistem kontrol loop terbuka
2. Sistem kontrolloop terbuka tertutup
8
Keuntungan sistem loop tertutup adalah adanya pemanfaatan nilai umpan balik yang dapat membuat respon sistem kurang peka terhadap gangguan eksternal dan perubahan internal pada parameter sistem.
Kerugiannya adalah tidak dapat mengambil aksi perbaikan terhadap suatu gangguan sebelum gangguan tersebut mempengaruhi nilai prosesnya.
Gambar 2.2 Diagram blok sistem kontrolloop tertutup
2.2.2 Kontrol analog dan diskrit
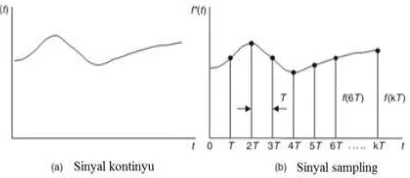
Pemanfaatan teknologi digital pada banyak aplikasi dan rekayasa teknik ikut berpengaruh pada perkembangan teknik kontrol. Kemajuan teknologi komputer dan prosesor saat ini sangat menguntungkan bagi desain sistem kontrol. Dari sini, trend desain kontrol digital perlahan menggantikan desain kontrol analog. Dapat dipahami bahwa umumnya plant maupun proses yang ingin dikendalikan merupakan besaran analog yang kontinyu, sedangkan pengendali (controller) yang digunakan dengan adanya teknologi prosesor. Untuk proses konversi analog-digital digunakan proses penyuplikan (sampling).
9
Sementara metode paling umum dipakai untuk konversi Digital Analog (DA) adalah denganZero Order Hold(ZOH), dimana mengkonversi sinyal-sinyal impuls menjadi deretan pulsa dengan lebar. Fungsi alih ZOH adalah sebagai berikut:
Gambar 2.4 Sinyal waktu diskrit dan sinyal waktu kontinyu
Tabel 2.1 Transformasi Z merupakan salah satu model representasi dari sistem SISO waktu diskrit
Sebuah sistem LTI bisa dinyatakan melalui persamaan beda
n
dengan x[n] adalah sinyal masukan, y[n] adalah sinyal keluaran, dan ak dan bk
10
Contoh Suatu sistem LTI, hubungan sinyal masukan dan keluaran dideskripkan dengan persamaan beda sebagai berikut:
y[n]−3y[n−1]−4y[n−2] =x[n] + 2x[n−1] (2.2)
dengan x[n] = 4nu[n]. Tentukan solusi dari persamaan beda tersebut untuk n =
1, . . . ,10, n = 100, sertan = 200.
Untuk menyelesaikan persamaan (2.2) dapat dilakukan dengan 3 cara, yaitu:
a. Metode rekursif;
b. Metode langsung (mendapatkan solusi homogen dan partikulirnya); c. Metode tidak langsung (menggunakan transformasi-z).
Pada penelitian ini hanya membahas contoh soal persamaan (2.2) dengan metode rekursif dan menggunakan program Matlab.
Metode rekursif adalah metode yang menggunakan nilai pada waktu yang lalu untuk mendapatkan nilai yang sekarang, sehingga dibutuhkan nilai awal dalam proses pengerjaannya. Metode rekursif dijalankan mulai dari n = 0. Kelemahan dari metode ini, untuk mendapat sinyal keluaran saatn, dibutuhkan informasi dari sinyal keluaran yang lalu, pada saat n−k.
Pada contoh persamaan (2.2), untuk mendapatkan solusi persamaan beda menggunakan metode reekursif, persamaan tersebut dibentuk sebagai berikut:
y[n] = 3y[n−1] + 4y[n−2] + 4nu[n] + 2(4n−1u[n−1]) Untukn= 0
11
Untuk nilai y[−1] dan y[−2] diberi nilai 0. Ini yang disebut dengan nilai awal. Jika dalam sistem LTI, keadaan demikian sistem dalam keadaan berelaksasi. Jadi dieperoleh
Untukn= 0 :
y[0] = 1 Untukn= 1 :
y[1] = 3y[0] + 4y[−1] + 41u[1] + 2 (40u[0])
= 3 (1) + 0 + 4 + 2 = 9
Untukn= 2 :
y[2] = 3y[1] + 4y[0] + 42u[2] + 2(41u[1])
= 3(9) + 4(0) + 16 + 28 = 55
Untukn= 10 :
y[10] = 3y[9] + 4y[8] + 410u[10] + 2(49u[9])
= 3(3103785) + 4(697303) + 1048576 + 524288 = 13673431
Jadi untuk n = 0 sampai n = 10, untuk sinyal masukan x[n] = 4nu[n] pada
sistem yang digambarkan dengan persamaan beda diatas, nilai keluarannya adalah:
y[n] = {1,9,55,297,1495,7209,33751,154665,697303,3103785,13673431}
12
coding program m-file berikut nama pers beda.m :
Hasilrunning adalah:
nilai sinyal masukan untuk persamaan beda adalah: [1,4,16,64,256,1024,4096,16384,65536,262144,1048576] nilai sinyal keluaran dari persamaan beda adalah:
[1,9,55,297,1495,7209,33751,154665,97303,3103785,13673431]
2.2.3 Kontrol konvensional/klasik dan modern
Teori kontrol yang sering digunakan saat ini adalah teori control klasik atau disebut teori kontrol konvensional, teori kontrol modern, dan teori kontrolrobust.
1. Klasik
13
Sistem kontrol klasik yang berkaitan dengan sistem SISO (input single-output) menjadi kurang cocok untuk diterapkan pada sistem MIMO ( multiple-input multiple-output).
Pada tahun 1960, dimulai era komputer digital, memungkinkan dilakukan analisis sistem kompleks dalam domain waktu dan sintesis menggunakan vari-abelstate. Hal tersebut mendorong kompleksitas dari plant modern dan kri-teria akurasi yang tinggi, bobot, dancost yang diimplementasikan di bidang militer, antariksa, dan aplikasi industri.
Analisis respons domain waktu, analisis ini dapat dilakukan jika diketahui a. Sifat alami/natural dari masukan/input, sebagai fungsi waktu;
b. Model matematis dari sistem. 2. Kontrol modern
di-14
namika atau pemodelan dalam bentuk persamaan dinamik, sebagai contoh persamaan diferensial. Dinamika sistem pada umumnya berdasarkan pa-da fungsi Lagrangian. Selanjutnya sistem dianalisis sesuai kinerjanya untuk mencari kestabilan sistem, adapun teori kestabilan yang cukup terkenal yaitu kestabilan Lyapunov. Terakhir, jika kinerja sistem tidak sesuai dengan spe-sifikasi yang diinginkan, maka dilakukan perancangan/desain. Fungsi Lag-rangian dan fungsi Lyapunov sudah lama diperkenalkan, namun konsep terse-but baru digunakan pada kontrol modern. Istilah modern sendiri adalah relatif terhadap waktu, jadi apa yang dianggap modern saat ini, dalam be-berapa tahun lagi dapat dianggap kuno.
Jadi yang lebih cocok digunakan dalam memberi label teori kontrol yaitu sesuai klasifikasi tertentu (sesuai sistem/fungsinya), misalkan kontrol opti-mal, kontrol nonlinier, kontrol adaptif dan kontrolrobust.
2.3 Peramalan
Peramalan pada dasarnya merupakan proses menyusun informasi tentang kejadian masa lampau yang berurutan untuk menduga kejadian di masa depan. Peramalan bertujuan mendapatkan ramalan yang dapat meminimumkan kesalahan meramal yang dapat diukur denganMean Absolute Percent Error(MAPE). Peramalan pada umumnya digunakan untuk memprediksi sesuatu yang kemungkinan besar akan terjadi, misalnya kondisi permintaan, banyaknya curah hujan, kondisi ekonomi, dan lain-lain.
15
Berdasarkan sifatnya, peramalan dibedakan menjadi:
1. Peramalan kualitatif
Peramalan yang didasarkan atas data kualitatif pada masa lalu. Hasil pera-malan kualitatif didasarkan pada pengamatan kejadiankejadian di masa se-belumnya digabung dengan pemikiran dari penyusunnya.
2. Peramalan kuantitatif
Peramalan yang didasarkan atas data kuantitatif masa lalu yang diperoleh dari pengamatan nilainilai sebelumnya. Hasil peramalan yang dibuat tergan-tung pada metode yang digunakan, menggunakan metode yang berbeda akan diperoleh hasil peramalan yang berbeda.
2.4 Teori Time Series
Time series adalah suatu rangkaian atau seri dari nilai-nilai suatu variabel atau hasil observasi, yang dicatat dalam jangka waktu yang berurutan (Bisgaard dan Kulahci, 2011).
Metode time series adalah metode peramalan dengan menggunakan analisa pola hubungan antara variabel yang akan diperkirakan dengan variabel waktu atau analisistime series, antara lain:
1. Metode smoothing;
2. Metode box jenkins (ARIMA);
3. Metode proyeksitrend dengan regresi.
16
Dengan adanya datatime series, maka pola gerakan data dapat diketahui. Dengan demikian,data time series dapat dijadikan sebagai dasar untuk:
1. Pembuatan keputusan pada saat ini;
2. Peramalan keadaan perdagangan dan ekonomi pada masa yang akan datang; 3. Perencanaan kegiatan untuk masa depan.
Analisa datatime seriesadalah analisa yang menerangkan dan mengukur berbagai perubahan atau perkembangan data selama satu periode. Analisis time series dilakukan untuk memperoleh pola datatime seriesdengan menggunakan data masa lalu yang akan digunakan untuk meramalkan suatu nilai pada masa yang akan datang. Dalamtime series terdapat empat macam tipe pola data, yaitu:
1. Horizontal;
Tipe data horizontal ialah ketika data observasi berubah-ubah di sekitar tingkatan atau rata-rata yang konstan. Sebagai contoh penjualan tiap bulan suatu produk tidak meningkat atau menurun secara konsisten pada suatu waktu.
2. Musiman (seasonal);
Tipe data seasonal ialah ketika observasi dipengaruhi oleh musiman, yang ditandai dengan tahun ke tahun. Sebagai contoh adalah pola data pembelian buku baru pada tahun ajaran baru.
3. Trend;
Tipe data trend ialah ketika observasi naik atau menurun pada perluasan periode suatu waktu. Sebagai contoh adalah data populasi
4. Putaran Cyclical.
17
2.4.1 Sistem identifikasi Sistem
Secara umum sistem merupakan semua proses yang mentransformasi suatu isyarat masukan menjadi isyarat keluaran. Sistem adalah rangkaian dari berbagai kom-ponen, piranti atau subsistem yang akan memberikan tanggapan terhadap sinyal masukan untuk menghasilkan sinyal keluaran yang diinginkan. Secara umum sis-tem merupakan semua proses yang mentransformasi suatu isyarat masukan menjadi isyarat keluaran dimana x(t) adalah input dan y(t) adalahoutput.
Sistem adalah rangkaian dari berbagai komponen, piranti atau subsistem yang akan memberikan tanggapan terhadap sinyal masukan untuk menghasilkan sinyal keluaran yang diinginkan.
Ada banyak cara orang membuat katagori sistem, hal ini tergantung pada fokus atau titik perhatian orang pada suatu sistem. Contohnya dengan menjadikan cara representasi sistem (apakah dengan persamaan differensial atau persamaan difference) sebagai titik perhatian, maka sistem dapat dikategorikan sebagai:
1. Sistem waktu kontinu (malar) Jika dapat direpresentasikan dengan persamaan differensial berbasis waktu kontinu (malar);
2. Sistem waktu diskrit (tak malar) Jika dapat direpresentasikan secara rekursif dengan persamaandifference.
Sistem dikatagorikan menjadi bermacam macam berdasarkan sifat-sifatnya antara lain :
1. Sistem dengan dan tanpa ingatan (with and without memory);
memo-18
ri/ingatan, atau dengan kata lain sistem disebut memiliki memori/ingatan jika sistem bisa menyimpan sinyal atau menyimpan energi yang masuk.
(a) Sistem dengan memori/ ingatan, indikatornya terdapat blok penundaan atau delay dan keluarannya masukan saat ini dan masa lalu;
(b) Sistem tanpa memori/ ingatan, indikatornya tidak terdapat blok penun-daan atau delay dan keluarannya masukan saat ini.
2. Sistem kausal dan non-kausal;
Kausalitas sistem disebut kausal jika keluarannya berasal dari masukan pada saat-saat sebelumnya. Lebih jelas lagi, keluaran di saat t=1 muncul akibat masukan di saat-saat t <1. Sistem riel di alam adalah sistem kausal. Mobil berjalan di saatt= 1 karena di saat-saat t<1 pedal gas pernah diinjak. Sis-tem yang tidak kausal adalah sisSis-tem yang memproses data rekaman. Dalam statistik dikenal istilah data smoothing atau penghalusan data, agar trend data lebih tampak secara grafis. Proses penghalusan data untukn= 5, mis-alnya, melibatkan data pada n = 4 dan data pada n = 6. Sistem seperti ini adalah sistem yang tidak kausal.
Suatu sistem dikatakan kausal, jika keluaran dan keadaannya pada saat sekarang, tidak bergantung pada masukan, keadaan dan/atau keluarannya pada masa yang akan datang atau sebuah sistem yang keluarannya ditentukan oleh ma-sukan sekarang dan masa lalu.
Sistem non kausal atau non causal sistem adalah sebuah sistem yang kelu-arnya saat ini juga ditentukan oleh kondisi masukan yang akan datang. 3. Sistem yang invertible dan non-invertible;
invertibilitas suatu sistem sangat penting khususnya dalam berbagai sistem pengolahan isyarat.
19
suatu sistem dikatakan invertible jika memiliki inverse. Inverse dari suatu sistem akan mengembalikan keluaran menjadi isyarat masukan.
Sistem pemancar radio memproses sinyal suara (dari musik atau penyiar) menjadi gelombang elektromagnetik. Sistem ini invertible karena sinyal ge-lombang elektro magnetik itu dapat diproses lagi sehingga terbentuk sinyal suara yang sama dengan masukannya. Sistem yang memproses secara inver-tible disebut sistem invers. Sistem pemancar radio mempunyai sistem invers, yaitu pesawat penerima radio.Jika keluaran diketahui, dapat menentukan masukannya. Hasilnya dikatakan sebagai sistem invers.
Suatu sistem dapat diuji invertibilitasnya dengan melihat apakah sistem tersebut melakukan pemetaan satu-ke-satu (one-to-one mapping) dari ma-sukan ke keluaran.
Konsep invertibilitas penting dalam berbagai konteks. Contohnya pada sis-tem penyandian yang digunakan dalam beraneka ragam aplikasi komunikasi yang luas. Dimana sinyal yang dikirimkan masuk kesistem yang namanya enkoder dengan maksud untuk memproteksi pesan asli untuk keamanan ko-munikasi atau penambahan bit-bit paritas sehingga setiap kesalahan yang terjadi dalam transmisi dapat dideteksi dan memungkinkan untuk dikoreksi, yang nantinya dikeluaran dikembalikan ke sinyal aslinya.
4. Sistem stabil dan tidak stabil;
Sistem disebut stabil jika sistem itu tahan gangguan. Jika sistem diberi gang-guan dan sistem mampu mengembalikan kondisinya seperti semula setelah gangguan hilang adalah sistem yang stabil. Sistem yang mengalami gang-guan kecil lalu tidak dapat mengembalikan kondisinya seperti semula adalah sistem yang tidak stabil.
20
invariant. Keluaran dari sistem dapat dikendalikan jika respon steady state terdiri dari respon kekuatan. Respon total dari sistem adalah jumlah dari respon kekuatan dan natural.
Sistem stabil jika respon natural mendekati nol sebagai fungsi waktu infinit ketidakterbatasan atau sitem dikatakan stabil bila sistem tersebut diberi ma-sukan/input tertentu dan menghasilkan tanggapan yang tidak menyimpang atau sesuai dengan yang diharapkan.
Sistem tidak stabil jika respon natural tumbuh tak terkendali sebagai fungsi waktu mendekati ketidakterbatasan.
Sistem marjinal stabil jika respon natural tidak berkurang atau bertumbuh melainkan tetap sebagai waktu mendekati ketidakterbatasan.
5. Sistemtime-varying dan time invariant;
Sistem time invariant jika perilaku dan karakteristik sistem tersebut tetap terhadap waktu. Contoh rangkaian listrik RC adalah time invariant jika harga resistansi dan kapasitansi konstan terhadap waktu, artinya hasil dari sebuah eksperimen saat ini dari suatu rangkaian akan sama pada waktu yang akan datang. Selain itu suatu sistem dikatan time invariant terjadi pada pergeseran waktu dalam isyarat masukan mengakibatkan pergeseran waktu yang serupa dalam isyarat keluaran.
Suatu sistem dikatakantime invariantjika pergeseran waktu pada isyarat ma-sukan hanya akan mengakibatkan pergeseran waktu pada isyarat keluaran. Jadi penundaan/pemajuan isyarat masukan hanya akan mengakibatkan pe-nundaan/pemajuan isyarat keluaran.
Sistemtime-varying bila perilaku dan karakteristik sistem tersebut berubah terhadap waktu.
6. Sistem linier dan tak linier;
21
Jadi untuk menunjukkan ketidaklinieran suatu sistem cukup dengan satu con-toh saja yang memperlihatkan bahwa suatu kombinasi linier isyarat masukan ternyata tidak menghasilkan kombinasi linier isyarat keluaran.
7. Sistem stasioner atau non stasioner.
Tahap awal untuk melakukan identifikasi model sementara adalah menen-tukan apakah data runtun waktu yang akan digunakan untuk peramalan su-dah stasioner atau tidak, baik dalam rata-rata maupun dalam variansi. Hal ini penting, sebab model-model ini hanya berlaku untuk data yang stasioner. Secara sederhana, konsep stasioner dapat diartikan suatu kondisi dimana ni-lai suatu data tidak jauh berbeda atau mungkin sama dengan data yang ni-lain. Bentuk visual yang disediakan oleh paket computer seperti Minitab dan SPSS dari suatu diagram runtun waktu akan dapat dengan mudah memperlihatkan kestasioneran suatu data.
Karena model runtun waktu umumnya menggunakan asumsi stasioner, diper-lukan cara atau metode untuk menghilangkan ketidakstasioneran data se-belum melangkah lebih lanjut pada pembentukan model. Hal ini dapat dica-pai melalui penggunaan metodedifferencing. Perumusannya adalah sebagai berikut:
zt=Yt−Yt−1 t = 2,3,4
Setelah dilakukan prosesdifferencing, maka data yang sudah ditransformasi diplotkembali. Jika hasilplotmenunjukkan data masih belum stasioner maka dilakukan kembali proses differencing hingga hasilplot menunjukkan stasio-ner.
Secara umum operasidifferencingyang menghasilkan suatu proses baru yang stasioner, yaitu wt adalah
wt= (1−B)d zt
22
Sistem identifikasi
Sistem identifikasi adalah sitem untuk membentuk model matematika sistem di-namis berdasarkan ukuran suatu data.
2.4.2 Penaksiran parameter
1. Autoregressive Models (AR)
Notasi AR(p), Model autoregressive dengan ordepdapat dimodelkan sebagai berikut:
Xt=c+Ppi=1ϕiXt−i+εt
dimanaϕ1, . . . ϕp adalah parameter, cadalah konstanta dan variabel acak εt
adalah noise.
2. Moving Average Models (MA)
Notasi MA(q) Model Moving average dengan orde q dapat dimodelkan seba-gai berikut:
Xt=µ+εt+Ppi=1θiεt−1
dimana θ1, . . . θq adalah parameter ,µ adalah harapan dari Xt (biasanya
di-anggap = 0) danεt, εt−1 adalah noise.
3. Autoregressive-Moving Average Models(ARMA)
Notasi ARMA (p, q), model dengan pAutoregressive dan q Moving Average. Model Autoregressive Moving Average ARMA (p, q) sebagai berikut:
Xt=c+εt+Ppi=1ϕiXt−i+ Pq
i=1θiεt−i
4. Autoregressive - Moving Average Exogenous Models (ARMAX)
Bentuk umum model ARMAX (p, q, b) dengan p adalah Autoregressive, q
adalah Moving Average danbadalah Exogenous. Model ini berisikan AR (p) dan MA (q) dan model terakhir kombinasi linier yaitu byang diketahui dan deret waktu dt yaitu:
Xt=εt+Ppi=1ϕiXt−i+Pqi=1θiεt−i+ Pb
23
5. Autoregressive Integrated Moving Average Models(ARIMA)
Secara umum model ARIMA (p, d, q) untuk suatu data runtun waktu zt
adalah sebagai berikut:
(1−ϕ1B−ϕ2B−. . .−ϕpBP)(1−B)dz t= (1−θ1B−. . .−θqBq)at
ekuvalen dengan
Zt =Ppi=1+dϕiZt−i+at− Pq
i=1θiat−i
dengan:
p, d, q : orde AR,orde differencing, dan ordeM A (non-musiman)
ϕp(B) : (1−ϕ1B−ϕ2B2−. . .−ϕpBP)
∇d : (1−B)d (orde differencing non-musiman) θq(B) : (1−θ1B−θ2B2−. . .−θqBq)
OQ(Bs) : (1−O1BS−O2B2S−. . .−OQBQS)
at : residual pada periode t
Setelah diperoleh dugaan model awal ARIMA, selanjutnya parameter dari model tersebut ditaksir, sehingga didapatkan besaran koefisien model. Secara umum penaksiran parameter model ARIMA Box-Jenkins dapat dilakukan dengan menggunakan beberapa metode seperti metodemoment, metodeleast square, metode maximum likelihood, dan sebagainya.
2.4.3 Transfer fungsi/fungsi alih/fungsi rasional
24
dengan kondisi awal nol dan keseimbangan titik nol. Dengan perangkat pencitraan optic, misalnya transformasi Fourier dari fungsi penyebaran titik (maka fungsi dari frekuensi spasial) yaitu distribusi intensitas yang disebabkan oleh benda titik dalam bidang pandang.
Dalam teori kontrol, fungsi transfer (fungsi alih) biasanya digunakan un-tuk mengkarakteristikkan hubungan antara komponen input output yang dapat diberikan oleh persamaan diferensial linear invarian waktu.
Fungsi transfer dari suatu sistem persamaan diferensial linier invarian waktu didefinisikan sebagai rasio antara transformasi Laplace darioutput (fungsi respon) dengan transformasi Laplace dari input dengan asumsi bahwa syarat awal adalah nol.
karena transformasi Laplace dari fungsi impulse satuan adalah 1 invers transformasi Laplace darioutput adalah
£−1{G(s)}=£−1{Y(s)}=g(t)
25
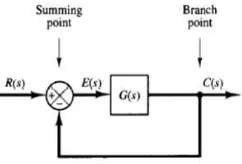
aliran dari sinyal, serta meramalkan hubugan antara bermacam-macam komponen. Dalam diagram blok, semua variabel sistem dihubungkan melalui blok fungsional. Blok fungsional adalah suatu simbol operasi matematika pada sinyalinput kepada blok yang menghasilkan output.
Fungsi transfer dari komponen biasanya dimasukkan ke dalam blok yang terkait yang dihubungkan oleh panah yang menunjukkan arah dari aliran sinyal.
Gambar 2.5 Contoh diagram blokloop tertutup
C(s) =G(s).E(s)
E(s) =R(s)−C(s)
C(s) =G(s).[R(s)−C(s)] [1 +G(s)].C(s) =G(s).R(s)
Fungsi transfer untuk diagram blok diatas adalah:
C(s)
R(s) =
G(s) 1+G(s)
sehingga, respon (output) adalah: