TOWARDS THE INTEGRATION OF INDOORGML AND INDOORLOCATIONGML FOR
INDOOR APPLICATIONS
L. Liua, S. Zlatanovaa∗, Q. Zhub, K. Lic a
Department of Urbanism, the Faculty of Architecture, Delft University of Technology, the Netherlands - (l.liu-1, s.zlatanova)@tudelft.nl b
Faculty of Geosciences and Environmental Engineering, Southwest Jiaotong University, Chengdu, Sichuan, China - [email protected]
c
Department of Computer Science and Engineering, Pusan National University, South Korea - [email protected] Commission IV, WG IV/4
KEY WORDS:IndoorGML, IndoorLocationGML, Location-Based Services, Indoor Navigation
ABSTRACT:
This paper introduces and compares two types of GML-based data standards for indoor location-based services, i.e., IndoorGML
andIndoorLocationGML. By elaborating the advantages of the both standards and their data models, we conclude that the two data standards are complementary to each other. A jointed data model is presented to show the integration of the two standards.IndoorGML
can supply subdivision of building for data ofIndoorLocationGML, and the semantics of locations defined inIndoorLocationGMLcan be added toIndoorGML. By proposing two use cases, we take the initiative in attempting to combine the use of the two standards. The first case is to collect details from files of the two standards for an indoor path; the second one is to generate verbal directions for indoor guidance from files of the two standards. Some future work is given for further development, such as automatic integration of separate data from both standards.
1. INTRODUCTION
Indoor activities such as indoor navigation greatly rely on indoor spaces, i.e.,regions with physical boundary or conceptual area without boundary (e.g.,the dining area of a hall). Applications in the real world requires clear and sufficient space definitions, in-door navigation models (e.g.,three-dimensional (3D) networks) simplifying building interiors and indoor routing/wayfinding sys-tems (e.g.,a pathfinding engine or signage system in the building) (Worboys, 2011; Lee and Kwan, 2005; Brown et al., 2013; Mei-jers et al., 2005; Becker et al., 2009; Thill et al., 2011; Bogus-lawski and Gold, 2010; Teo and Cho, 2016). Such information is partially organized in different data models and technical stan-dards (Lee and Kwan, 2005; Worboys, 2011; Brown et al., 2013; Becker et al., 2009; Lee et al., 2014; Liu and Zlatanova, 2012). In addition, indoor navigation requires good expressions of lo-cation to be able to position one in the spaces or to navigate to aPoint of Interest (PoI)with ease (Sithole and Zlatanova, 2016; Wijewardena et al., 2016; Kim and Li, 2016).
Crossing the current research one of the primary problems is to properly define and describe indoor spaces and locations, their re-lationships and other significant information (semantics, impor-tant attributes and geometry) (Worboys, 2011; Goetz and Zipf, 2011; Brown et al., 2013). Many explorations have been devoted in this direction. A typical and established piece of work for in-door modelling isIndoorGML(Lee et al., 2014), a data standard ofOpen Geospatial Consortium (OGC)about navigation network of indoor environments. It provides a concise expression of in-door navigation networks and related inin-door spaces with their se-mantics. Another interesting study is an emerging Chinese data standardMultidimensional Indoor Location Information Model (IndoorLocationGML)focusing on indoor location, which aims to address urgent requirements on indoor location modelling (Zhu
∗Corresponding author
et al., 2016). It proposes a framework that can manage both ac-curate and relative descriptions of indoor locations, enrich loca-tions with semantics, and maintain topology of localoca-tions (e.g.,
distance, direction, order,etc.).
In this paper we investigate the two data standards ofIndoorGML
andIndoorLocationGMLand aim to bridge the two standards to support more indoor navigation cases. The two standards concen-trate on different aspects of indoor navigation, and thus they are complementary to each other for indoor navigation applications.
IndoorGMLfocuses on navigation networks where pathfinding can be conducted, butIndoorLocationGMLcovers the issues re-lated to indoor locations. Thus IndoorLocationGMLaims for location-based services. In fact, the both standards can be used together for two main types of cases presented as follows:
• Support different indoor subdivision results. • Generate verbal guidance for indoor navigation.
The rest of this paper is organized as follows: Section 2 will in-troduce the two data standards, Section 3 will present the uses of the both standards to each other. Section 4 will present two use cases by linking the two standards. This paper is closed with conclusions and some future work in Section 5.
2. INDOORGML AND INDOORLOCATIONGML
The two data standards are both presented with data model in
and direction). Therefore, the two data models can be comple-mentary to each other on different aspects for indoor navigation. This section will introduce the key features of the two standards. Section 2.1 will present the overview ofIndoorGMLand section 2.2 will explain the data model ofIndoorLocationGML. 2.1 IndoorGML
Figure 1. Main classes of Core module of IndoorGML (from Lee et al., 2014)
As mentioned before,IndoorGMLis a data standard ofOGCthat aims to define navigation network of indoor environments (Lee et al., 2014). It consists of an open data model andXMLschema and it has two modules. The first one isCoremodule (see Fig-ure 1). Basically it is about a topological representation of cel-lular spaces. These spaces and their boundaries correspond to
CellSpaceandCellSpaceBoundary. Other two primary classes of
StateandTransitionlink toCellSpaceandCellSpaceBoundary
according to Poincar´e Duality (Whitney, 1932; Gonz´alez, 1984), respectively.
States andTransitions represent nodes and edges of the dual graph (Whitney, 1932) of indoor space. The two terms are the same as those inMulti-Layered Space Model (MLSEM)(Becker et al., 2009),i.e.,another data model about indoor space information related toIndoorGMLstandard (Nagel, 2014).MLSEMproposes a semantic conceptual model for indoor spaces, and provides the geometric and topological representations of indoor spaces based on Poincar´e Duality. Inspired by these indoor space representa-tions inMLSEM,IndoorGMLis designed as a common schema framework for indoor navigation applications (Lee et al., 2014). The second module is Navigation which focuses on semantic features of indoor spaces. TheNavigationmodule extends the
Coremodule and defines semantics of spaces in the context of indoor navigation. The root classes about spaces are Naviga-bleSpaceandNavigableSpaceBoundary. They are subclasses of
CellSpaceandCellSpaceBoundary, respectively. The subclasses ofNavigableSpacedefine all types of indoor spaces, such as Nav-igableSpace, GeneralSpace (e.g., common rooms), Transition-Space (e.g., Hallway or Stairway)andAnchorSpace (e.g., main entrance linking indoors and outdoors). TheNavigationmodule also represents indoor paths: classes ofRouteNode, RouteSeg-mentandRoute. RouteNodeassociates toState,RouteSegment
associates to Transition, andRoute represents navigable paths. In such a way, space semantics (e.g.,aTransitionSpace) can be reflected in aRouteNode.
In general,IndoorGMLdefines and expresses the network of in-door spaces (e.g.,connectivity graph) and indoor paths. In ad-dition, space semantic features are defined which can be used to enrich the semantics of indoor network and paths.
2.2 IndoorLocationGML
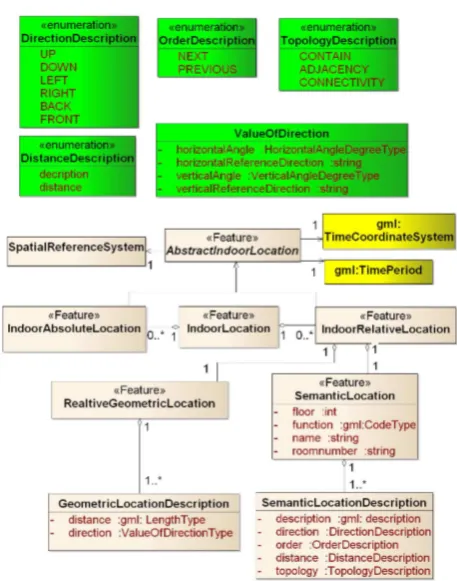
Figure 2. Main part ofIndoorLocationGML(remade from Zhu et al., 2016)
As mentioned before, the developing Chinese standard Indoor-LocationGMLconcentrates on definition and description of in-door location (Xiong et al., 2013; Zhu et al., 2016). The ab-stract class AbstractIndoorLocation stands for the general no-tion of indoor locano-tions, which associates to three other classes:
gml:TimeCoordinateSystem, gml:TimePeriodand SpatialReferenceSys-tem(Figure 2) . The first two are classes ofGML Encoding Stan-dard(Portele et al., 2007) and indicate the temporal features of
AbstractIndoorLocation.SpatialReferenceSystemrefers to an ab-solute or local coordinate system which provides measurement for instances ofAbstractIndoorLocation.
Two subclasses ofAbstractIndoorLocation, IndoorAbsoluteLo-cationandIndoorRelativeLocation, represent locations described in the coordinate system or with the relationships with other ob-jects/locations, respectively. AnIndoorLocationis composed of bothIndoorAbsoluteLocationandIndoorRelativeLocation, which indicates the two types of measurement applied for one location.
IndoorRelativeLocationhave two subclasses: RelativeGeometri-cLocationandSemanticLocation(see Figure 2). The classes Rel-ativeGeometricLocationcontains the values of distance and di-rection (e.g.,angles) to other reference objects;SemanticLocation
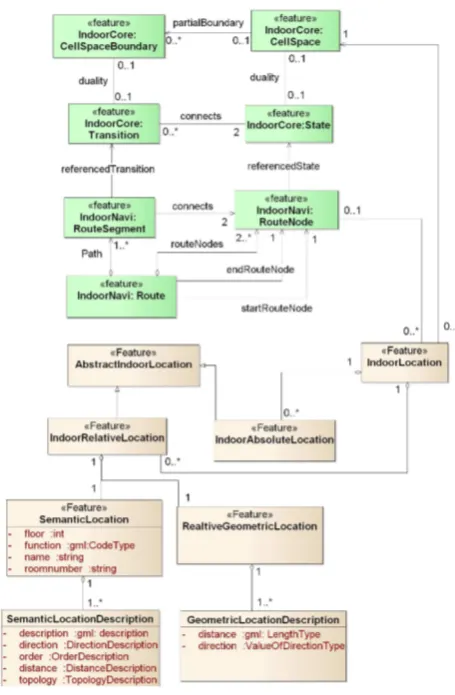
In order to present the relationships between the data models of the two standards, we integrate the core parts of the two mod-els in one UML class diagram (see Figure 3). Two essential associations, IndoorLocation toCellSpaceand RouteNode, are the key to integrate the two types of data model. The class In-doorLocationfromIndoorLocationGMLdepicts any location in a space (i.e., CellSpace), and anRouteNoderepresents a space. In the association ofCellSpaceand IndoorLocation, the multi-plicity on theIndoorLocationside is from 0 to multiple, which means aCellSpacemay contain none or manyIndoorLocation. Reversely, anIndoorLocationcan associate only oneCellSpace
(i.e.,the multiplicity 1). In the association ofRouteNodeand
IndoorLocation, the multiplicity on theIndoorLocation side is none or many and that on theRouteNodeside is none or one. It means that anRouteNodecan either link toIndoorLocationor none, while anIndoorLocationcan be either a location of a path (inRouteNode) or just an independent PoI.
Figure 3. The jointed class diagram ofIndoorGMLand
IndoorLocationGML
To sum up,IndoorLocationGMLprovides the complete descrip-tion and measurement of indoor locadescrip-tions and models the rela-tionships of indoor locations. Therefore, it can describe a se-quence of locations and their relative relationships, such as lo-cations in a path (e.g.,to describe the motion from the previous location to the current location in distance and angle).
3. COMBINED USE OF INDOORGML AND INDOORLOCATIONGML
As addressed before,IndoorGMLandIndoorLocationGML em-phasize different aspects of indoor modelling. Thus the both standards can be use together for indoor navigation. Section 3.1 will show the use ofIndoorLocationGMLcomplementary to In-doorGML; and Section 3.2 presents the features ofIndoorGML
complementary toIndoorLocationGML.
3.1 IndoorLocationGML complementary to IndoorGML
Although in theNavigationmodule ofIndoorGMLsemantics of spaces are provided, there is no definition of PoI. PoI can be frequently used in indoor navigation as position reference, es-pecially when they can be added and deleted by users (see Figure 4). In this case, a PoI can be represented by instances of In-doorAbsoluteLocationandIndoorRelativeLocation. Coordinates of the PoI are reflected by theIndoorAbsoluteLocationand the semantics of the PoI (e.g.,floor information and function) can be recorded in theIndoorRelativeLocation. Consequently, we can form a file containing theIndoorGMLandIndoorLocationGML
code snippets. For example, for a node theIndoorGMLpart in-cludes the code ofRouteNodeandRouteSegment; and the Indoor-LocationGMLpart contains the piece ofIndoorAbsoluteLocation
and/orIndoorRelativeLocation.
Figure 4. Example of RouteNode and RouteSegment which can be enriched by IndoorRelativeLocation instances
Another case is aboutTransitionSpaceinIndoorGML. The class
TransitionSpacerefers to corridor, stair and subspaces of hallway (Lee et al., 2014). Generally it is about the horizontal and vertical connection parts of a building. However, theIndoorGML Tran-sitionSpacedoes not specifically distinguish between horizontal and vertical spaces. Consequently, this ambiguity can be passed to the related instances of RouteNode. In this case, instances ofIndoorRelativeLocationcan be added to clarify whether the
In summary, theIndoorGMLmay lack location information for some applications. The semantics defined and depicted in In-doorLocationGMLcan be used for the network described by In-doorGML. In this way, the semantics of nodes and edges of this network can be enriched.
3.2 IndoorGML complementary to IndoorLocationGML
IndoorGMLcan supply data forIndoorLocationGMLwhen space-related information is required. Subdivisions of building can be reflected inIndoorGML files which is missing in IndoorLoca-tionGML. A specific subdivision of building results in a num-ber of indoor spaces. Besides the subdivision according to build-ing structure (e.g.,walls as boundary), other subdivisions can be achieved by using functionalities of indoor space (Kr¯uminait˙e and Zlatanova, 2014). According to(MLSEM)(Becker et al., 2009), the same building can be organized in different layers with differ-ent subdivision results. For example, one layer represdiffer-ented by a group of navigable spaces for a user and another layer consisting of the coverage area of aWi-Fitransmitter in the whole build-ing. For each layer, a network can be generated and described by
StateandTransitioninstances in anIndoorGMLdocument. This information can be integrated with anIndoorLocationGMLfile.
Figure 5. Example of subdivision result of a residence building.
Figure 5 shows a case that doors are regarded as space. Normally a thin door is considered as 2D surface and thus the connectivity graph of spaces is constructed for rooms. But inIndoorGMLa thickDoorwith depth attribute is also considered as space. In the presented example, the connectivity graph is about rooms and doors. This connectivity graph can be depicted by instances of
StateandTransition. AStatecan represent aRoomor aDoor. In this way, three types ofTransitioncan be identified: ’door-to-door’, ’door-to-room’ and ’room-to-room’. Such semantic infor-mation from the subdivision can be added to the related Indoor-LocationGMLfile.
Space semantics in theNavigationmodule ofIndoorGMLcan also be passed into anIndoorLocationGMLfile. For example, an instance of State is assigned with semantics of the related space (e.g., TransitionSpace). Corresponding indoor locations organized in theIndoorLocationGMLfile can be assigned the se-mantics according to their relationships to theseStateinstances.
In a word,IndoorGMLcarries the subdivision result of buildings, which can flexibly describe different indoor networks. This in-formation can be added toIndoorLocationGMLand semantics of the space containing indoor locations could be clarified.
4. USE CASES
Previously the features ofIndoorGMLandIndoorLocationGML
have been explained. It is feasible to combine these two data standards for indoor navigation applications. By integrating the two types of data model, examples of indoor navigation that are benefited by this combination could be:
Case 1: Path detail enrichment
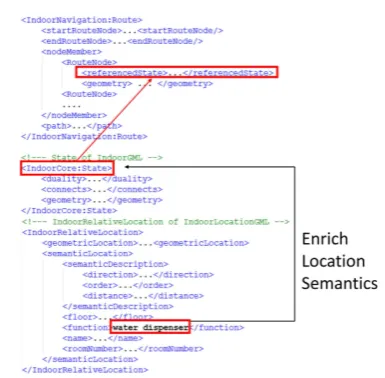
Figure 6. IndoorLocationGML provides detailed location semantics for Route instances
IndoorGMLandIndoorLocationGMLboth contain path-related information. The class RouteofIndoorGMLmaintains indoor paths. By usingIndoorLocationGML, other characteristics of this path can be revealed. For example, eachRouteNodeof aRoute
can be enriched with nearby locations (Wi-Fi active points or smoke detectors) described inIndoorRelativeLocation. In such cases, it is easy to count the resource locations that a path in-volves, such asquery points, kiosksandwater dispensersin the path. In Figure 6 eachRouteNodeof aRoutehas relatedState. AnIndoorRelativeLocationinstance supplies thisStatewith the location semantics (the function ’water dispenser’). This com-bination provides diverse information about a path for different users.
A path can be also conveyed byIndoorLocationGMLif the path is represented by a sequence of locations. The path contains both the coordinates and the sequence of these locations. Semantic information of these locations are also conveyed with the class
SemanticLocation. In addition, IndoorGML can supply space subdivision result for the path (see Figure 7). AStaterelated toCellSpacefollows the subdivision contained in partialbound-edBy. This information is also supplied to the related instance of
IndoorRelativeLocation.
Figure 7. IndoorGML supplies subdivision result for IndoorRelativeLocation instances
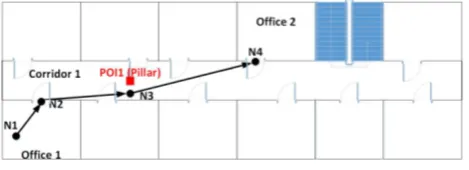
Verbal directions are used to improve user’s understanding of path derived from indoor navigation (Russo et al., 2014). For a given path, verbal directions regarding guidance for users can be generated by usingIndoorGMLandIndoorLocationGML to-gether.IndoorGMLcan represent indoor path in spaces as RouteN-odeandRouteSegment. Specifically, space of rooms and doors are represented byRouteNode; and aRoutecan present an abstact path in ’room-to-room’, ’door-to-door’ and ’room-door-room’ styles. However,RouteNodedoes not include its direction and distance information to other nodes. Besides,RouteNodedoes not neces-sarily include all POI in the related space. For instance, in Fig-ure 8 instances ofRouteNodeareN1, N2, N3and N4. N1and
N3are specific nodes which stand for Office1 and Corridor1, re-spectively. N2andN4are the reference nodes of two doors. By
IndoorGML, thisRouteofN1-N2-N3-N4is a ’room-door-room’ path. The point of interestPOI1, representing the location of a pillar, cannot be indicated by the classRouteNode.
Figure 8. Example of a path in a floor
Semantics fromIndoorLocationGMLsupports directional/topological and geometric details toN1, N2, N3andN4.IndoorLocationGML
can supplement detailed location semantics and relative positions between the locations, such asN2 is next to N1, and N2 is in the front-right of N1. The unity of two standards can give an com-plete overview on the path (see Figure 8). The geometric loca-tions ofN1, N2, N3andN4are on the same floor. According to the relatedIndoorLocationGMLdocument,N2is next toN1in 3 meters(m) and on right of it in the direction of 60 degree. Simi-larly the relative position ofN3toN2and that ofN4toN3can be decoded from theIndoorLocationGMLdocument. Specially, the geometric locationPOI1can be used to assist the user to better locate her/his movement: the user can confirm the direction be-tweenN2andN3when she/he perceivesPOI1. Finally, we can
obtain verbal directions for this path shown below:
’This path is on the same floor, started fromoffice 1, through one corridor and ended atoffice 2. Each step is assumed 70cm.’ ’Started from the location (N1) and turnfront-right. After 4 steps you can move out through the door (N2) and then turnrighton the corridor.’
’Keep this direction, after 6 steps you must see a pillar on your
left.’
’Turnfront-left, after 10 steps you could see a door (N4) on the
left. Then you arrive at office 2.’
5. CONCLUSION
This paper presents the possibility to use two indoor-related stan-dards for indoor applications,i.e., IndoorGMLand IndoorLoca-tionGML. We briefly present and compare the two standards. They focus on aspects of indoor modelling. IndoorGMLfocuses on indoor navigation networks and space representation of differ-ent subdivisions. WhileIndoorLocationGMLconcentrates on a complete representation and description of indoor locations. For indoor navigation, the two standards are complementary to each other: the subdivision information carrying byIndoorGMLcan be added toIndoorLocationGML, and the semantics of locations defined inIndoorLocationGMLcan be complementary toIndoorGML. In this paper we propose first ideas to a conceptual integration of the two indoor standards. On the level of data model, the es-sential class ofIndoorLocationGMLnamedIndoorLocation asso-ciates with twoIndoorGMLclasses,i.e., CellSpace(Core mod-ule) andRouteNode(Navigation Module). Based on the relation-ships, two types of applications are considered: 1) supply subdi-vision details (e.g.,indoor spaces) fromIndoorGMLto Indoor-LocationGMLdatasets; and 2) supplement location details (e.g.,
direction, distance and all PoI) fromIndoorLocationGMLto In-doorGMLdatasets. We also present the related use cases con-sidering the combined use of the two standards as initiatives. The result shows it is feasible to utilize the two data standards together for path detail enrichment and verbal directions generation. In the future, the combination of the two standards can be fur-ther explored, such as to incorporateIndoorLocationGML seman-tics for different subdivisions depicted byIndoorGML(e.g., func-tional subdivision). Another work is to create a jointed format to integrate data from the two standards, which can facilitate their use for realistic applications. Based on the jointed format, auto-matic integration of separate data from both standards can be in-vestigated. Tests need to be conducted to generate data files with the two standards for the same dataset. In this way, applications can be developed to load and visualize data of indoor networks and locations.
ACKNOWLEDGEMENTS
References
Becker, T., Nagel, C. and Kolbe, T., 2009. A multilayered space-event modelfornavigationin indoorspaces. In: J.Lee andS. Zlatanova(eds),3D Geo-InformationSciences, Lecture Notes in Geoinformation and Cartography, Springer Berlin Heidelberg,pp.61–77.
Boguslawski, P. and Gold, C., 2010. Euler operators and nav-igation of multi-shell building models. In: T. Neutens and P. Maeyer (eds), Developments in 3D Geo-Information Sci-ences, Springer Berlin Heidelberg, Berlin, Heidelberg, pp. 1– 16.
Brown, G., Nagel, C., Zlatanova, S. and Kolbe, T., 2013. Mod-elling3d topographicspace againstindoor navigation require-ments. In: J. Pouliot, S. Daniel, F. Hubert and A. Za-myadi(eds),Progressand NewTrendsin 3D Geoinformation Sciences, Lecture Notes in Geoinformation and Cartography, SpringerBerlinHeidelberg,pp.1–22.
Goetz, M. and Zipf, A., 2011. Extending OpenStreetMap to indoor environments. CRC Press, pp.51–61. doi:10.1201/ b11647-7.
Gonz´alez, J. R. M., 1984. Elements of algebraic topology. Kim, J.-S. and Li, K.-J., 2016. Location k-anonymity in indoor spaces.GeoInformatica20(3),pp.415–451.
Kr¯uminait˙e, M. and Zlatanova, S., 2014. Indoor space subdi-vision for indoor navigation. In: Proceedings of the Sixth ACM SIGSPATIAL International Workshopon Indoor Spatial Awareness,ACM,pp.25–31.
Lee, J. and Kwan, M., 2005. A combinatorial data model for representing topological relations among 3d geographical features in microspatial environments. International Journal of Geographical Information Science 19(10), pp. 1039–1056. doi=http://dx.doi.org/10.1080/13658810500399043.
Lee, J., Li, K., Zlatanova, S., H.Kolbe, T., Nagel, C. and Becker, T.,2014. OGCIndoorGMLVersion1.02. Document No.14-005r4.
Liu, L. and Zlatanova, S., 2012. A semantic data model for indoor navigation. In: Proceedings of the Fourth ACMSIGSPATIAL InternationalWorkshoponIndoorSpatialAwareness,ISA’12, ACM,NewYork,NY,USA,pp.1–8.
Meijers, M., Zlatanova, S. and Pfeifer, N., 2005. 3d geoinfor-mationindoors:structuringforevacuation.In:Proceedingsof Nextgeneration3Dcitymodels,pp.21–22.
Nagel, C., 2014. Spatio-semantic modelling of indoor environ-mentsforindoornavigation. PhDthesis,Technische Univer-sit¨atBerlin.
Portele, C., Cox, S. J. D., Daisey, P., Lake, R. and Whiteside, A., 2007.OpenGISGeographyMarkupLanguage(GML) Encod-ingStandardVersion3.2.1. DocumentNo.07-036.
Russo, D., Zlatanova, S. and Clementini, E., 2014. Route di-rections generation using visible landmarks. In: Proceedings ofthe SixthACMSIGSPATIALInternationalWorkshopon In-doorSpatialAwareness, ISA ’14, ACM, New York, NY, USA,
pp.1–8.
Sithole, G. and Zlatanova, S., 2016. Position, location, place andarea: Anindoorperspective. ISPRSAnnalsof Photogram-metry,Remote SensingandSpatialInformation SciencesIII-4, pp.89–96.
Teo, T.-A. and Cho, K.-H., 2016. Bim-oriented indoor network modelforindoorandoutdoorcombinedrouteplanning. Ad-vancedEngineeringInformatics30(3),pp.268–282.
Thill, J.-C., Dao, T. H. D. and Zhou, Y., 2011. Traveling in the three-dimensional city: applications in route planning, acces-sibility assessment, location analysis and beyond. Journal of Transport Geography 19(3), pp. 405 – 421. Special Issue : GeographicInformationSystemsforTransportation.
Whitney, H., 1932. Non-separable and planar graphs. Transac-tions of the American Mathematical Society34, pp. 339 – 362. Wijewardena, G. G., Vasardani, M. and Winter, S., 2016. Towards indoor localization and navigation independent of sensor based technologies.In: ProceedingsoftheEighthACMSIGSPATIAL InternationalWorkshoponIndoorSpatialAwareness,ISA’16, ACM,NewYork,NY,USA,pp.19–26.
Worboys, M., 2011. Modeling indoor space. In: Proceedings of the 3rd ACM SIGSPATIAL International Workshop on In-doorSpatialAwareness,ISA’11,ACM,NewYork,NY,USA, pp. 1–6. doi=http://doi.acm.org/10.1145/2077357.2077358. Xiong, Q., Zhu, Q., Zlatanova, S., Huang, L., Zhou, Y. and Du, Z., 2013. Multi-dimensional indoor location information model. ISPRS - InternationalArchivesof thePhotogrammetry, Remote Sensing and Spatial Information Sciences ISPRS Ac-quisition and Modellingof Indoor and EnclosedEnvironments 2013(XL-4/W4),pp.45–49.