BAB 2
LANDASAN TEORI
Di dalam penulisan tugas akhir ini, penulis mengambil beberapa tinjauan pustaka yang
dijadikan sebagai bahan dalam mendukung penyusunan tugas akhir ini. Adapun
tinjauan pustaka tersebut antara lain sebagai berikut:
2.1.Photovoltaic Cell
Energi listrik dapat dibangkitkan dengan mengubah sinar matahari melalui sebuah
proses yang dinamakan photovoltaic (PV). Photo merujuk kepada cahaya dan volatic
merujuk pada tegangan. Photovoltaic cell dibuat dari material semikonduktor terutama silikion yang dilapisi oleh bahan tambahan khusus. jika cahaya matahari mencapai sel
maka elektron akan terlepas dari atom silikon dan mengalir membentuk sirkuit listrik
sehingga energi listrik dapat dibangkitkan. Menurut Chenni et. al (2007) Sel surya
selalu didesain untuk mengubah cahaya menjadi energi listrik sebanyak-banyaknya
dan dapat digabung secara seri atau paralel untuk menghasilkan tegangan dan arus
yang diinginkan. Sedangkan pemanfaatan energi surya menurut Mirdanies et. al
(2011) sebagai sumber energi listrik dapat dihasilkan menggunakan panel fotovolatik
atau pemusatan sinar surya.
Kinerja dari photovoltaic cell sangat tergantung kepada sinar matahari yang diterimanya. Kondisi iklim (misal awan dan kabut) mempunyai efek yang sangat
signifikan terhadap jumlah energi matahari yang diterima sel sehingga akan
1. single crystal silicon,
2. multi crystal silicon, dan
3. amorphous silicon.
Amorphous jenis panel surya terbaik. Panel surya Amorphous diciptakan
dengan menyemprotkan silikon ke kaca di lapisan sangat tipis, dan umumnya dikenal
sebagai panel surya film tipis. Dari proses ini memungkinkan jenis panel surya ini
kualitasnya menjadi lebih baik pada pembangkit listrik tenaga surya di segala kondisi
pencahayaan, termasuk lingkungan berawan atau teduh. Panel surya amorphous tahan
terhadap cuaca dan cocok untuk pemakaian di luar gedung. Mereka memiliki operasi
maksimum kisaran suhu -40 sampai +176 derajat Fahrenheit, hampir tidak ada
perawatan, dan juga efektif pada hari berawan (Iqbal, 2014).
Tabel 2.1 Perbandingan Antara Jenis-Jenis Sel Surya
2.2.Pergerakan Matahari
Dikarenakan dalam penelitian ini tidak menggunakan sensor pendeteksi cahaya
melainkan timer RTC (Real Time Clock) untuk mengetahui posisi pergerakan
matahari. Maka, diperlukan proses penentuan ketetapan pergerakan matahari setiap
derajatnya untuk mendapatkan hasil yg maksimal. Untuk itu menurut Febi & Tiryono
(2008) dalam jurnalnya berjudul Korespondensi Lintasan Matahari dan Bulan Sebagai Dasar Untuk Membangun Model dan Database Kecerahan Sinar Bulan telah menghasilkan dan membahas bahwa satu hari memiliki durasi 24 jam, maka bola
360/24 = 15°/jam sehingga, 60 menit/ 15° menghasilkan empat menit per satu derajat.
Berdasarkan ketentuan ini, penulis menerapkan pada alat untuk bergeser posisi dari
timur ke barat setiap empat menit sebesar satu derajat.
2.3.Perangkat Keras
Adapun perangkat keras yang digunakan dalam dalam tugas akhir ini adalah sebagai
berikut:
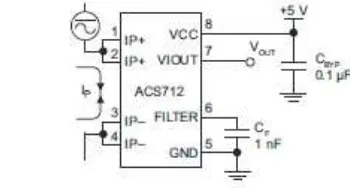
2.3.1. Sensor Arus ACS712
Sensor arus adalah alat yang digunakan untuk mengukur kuat arus listrik. Sensor arus
ini menggunakan metode Hall Effect Sensor. Hall Effect Sensor merupakan sensor yang digunakan untuk mendeteksi medan magnet
Gambar 2.1 Sensor Arus ACS712
Hall Effect Sensor akan menghasilkan sebuah tegangan yang proporsional dengan kekuatan medan magnet yang diterima oleh sensor tersebut. Pendeteksian
perubahan kekuatan medan magnet cukup mudah dan tidak memerlukan apapun selain
sebuah induktor yang berfungsi sebagai sensornya.
Kelemahan dari detektor dengan menggunakan induktor adalah kekuatan
medan magnet yang statis (kekuatan medan magnet nya tidak berubah) tidak dapat
dideteksi. Oleh sebab itu diperlukan cara yang lain untuk mendeteksi nya yaitu dengan
untuk mengalirkan arus listrik. Dengan metode ini arus yang dilewatkan akan terbaca
pada fungsi besaran tegangan berbentuk gelombang sinusoidal.
2.3.2. Mikrokontroler ATMega 8535
Mikrokontroler, sesuai namanya adalah suatu alat atau komponen pengontrol atau
pengendali yang berukuran mikro atau kecil. sebelum ada mikrontroler, telah ada
terlebih dahulu muncul mikroprosesor. Bila dibandingkan dengan mikroprosesor,
mikrokontroler jauh lebih unggul karena terdapat berbagai alasan, diantaranya :
1. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia
2. Memori internal
memori merupakan media untuk menyimpan program data sehingga mutlak
harus ada. Mikroprosesor belum memiliki memori internal sehingga memerlukan IC
memori eksternal. Dengan kelebihan-kelebihan diatas serta dengan harga yang relatif
murah sehingga banyak penggemar elektronika yang kemudian beralih ke
mikrokontroler. Namun demikian, meski memiliki berbagai kelemahan,
mikroprosesor tetap digunakan sebagai dasar dalam mempelajari mikrokontroler. Inti
kerja dari keduanya adalah sama, yakni sebagai pengendali suatu sistem.
Mikrokontroler merupakan komputer di dalam chip yang digunakan untuk
mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya.
Secara harfiahnya bisa disebut "pengendali kecil" dimana sebuah sistem elektronik
yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC
TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan
oleh mikrokontroler ini. Dengan menggunakan mikrokontroler ini maka :
1. Sistem elektronik akan menjadi lebih ringkas.
2. Rancangan bangun sistem adalah perangkat lunak yang mudah dimodifikasi.
3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak.
Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen IC TTL
dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau
sekedar menambah jumlah saluran input dan output (I/O). dengan kata lain,
mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena
mikrokontroler sudah mengandung beberapa bagian yang langsung bisa dimanfaatkan,
konversi analog ke digital (ADC), dan sebagainya hanya menggunakan minimum
sistem yang tidak rumit atau kompleks.
Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya
mikroprosesor sebagai otak komputer. Namun mikrokontroler memiliki nilai tambah
karena didalamnya sudah terdapat memori dan sistem input/output dalam suatu
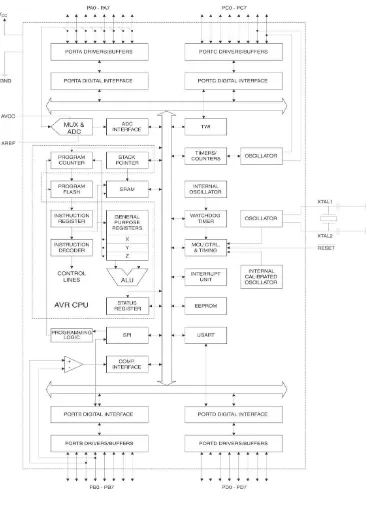
kemasan IC. Mikrokontroler AVR (Alf and Vegard’s RISC processor) standar
memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16- bit dan
sebagian besar instruksi dieksekusi dalam satusiklus clock. Berbeda dengan instruksi
MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CISC (seperti
komputer). Menurut iswanto (2008) mikrokontroler ATMega 8535 memiliki fitur
yang sama dengan mikrokontroler AT90S8535. Selain itu, konfigurasi pin AVR
ATMega 8535 juga kompatibel dengan AT90S8535. Fasilitas yang lengkap tersebut
menjadikan ATMega 8535 sebagai mikrokontroler yang powerful. Adapun blok
diagramnya sebagai berikut :
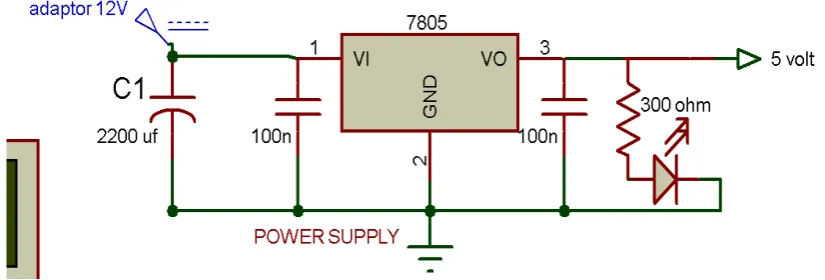
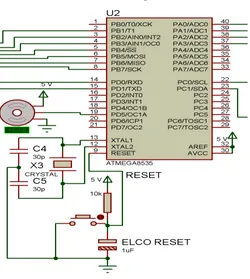
2.3.3. Bagian Sumber Tegangan
Sumber tegangan yang dibutuhkan agar sistem dapat bekerja dengan stabil adalah
sekitar 5V DC dan tidak lebih dari 6V. Jika tegangan yang diberikan pada sistem
melebihi batas ini maka dapat merusak komponen seperti mikrokontroler atau LCD.
Sumber tegangan ini selanjutnya akan diberikan kepada komponen-komponen yang
ada pada sistem, dan komponen lain yang membutuhkan sumber tegangan. Sumber
tegangan diperoleh dari adaptor 12 V. Hal ini dikarenakan agar sistem dapat bekerja
secara otonom dan sistem dapat terus bekerja selama 24 jam penuh dalam sehari tanpa
mengalami gangguan kekurangan sumber tegangan. Saat adaptor dapat bekerja
dengan baik dan memberikan tegangan yang cukup kepada sistem, Gambar 2.4
menunjukkan rancangan sumber tegangan yang digunakan pada sistem dan agar
sistem tidak rusak diakarenakan tegangan 12 V, maka diturunkan terlebih dahulu
menggunakan ic 7805 agar tegangan yang terpasok ke sistem tetap 5 Volt.
Gambar 2.3 Power supply Dari Adaptor
2.3.4. Bagian ISP Programmer
Programmer/downloader berfungsi untuk menanam program yang telah di buat
sebelumnya di editor codevision avr. Program yang telah berhasil dibuat kemudian
dicompile sehingga menghasikan code program berekstensi .hex, untuk mendownload
file hasil kompilasi ini, maka komputer atau PC harus terhubung dengan sistem
mikrokontroller dengan menggunakan Programmer. Satu sisi programmer
dihubungkan ke usb PC dan satu sisi lagi dihubungkan ke sistem mikrokontroller.
Programming). Programmer ini menggunakan satu buah port usb. Penanaman program hex ini hanya membutuhkan sekali penanaman saja, dan setelah di download,
maka sistem dapat bekerja secara mandiri dan programmer dapat di cabut dari sistem
Gambar 2.4 Gambar HardwareProgrammerAVR
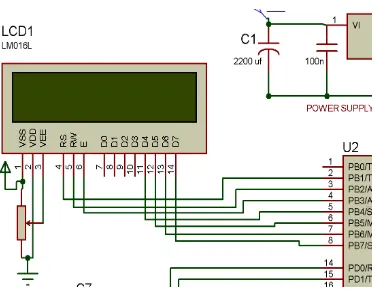
2.3.5. Bagian Output ke LCD
LCD LMB162A memiliki 16 pin, delapan pin sebagai bus data, tiga pin sebagai bus
kontrol, dan lima pin lainnya sebagai jalur power supply dan pengaturan kontras LCD. Perancangan antarmuka LCD membutuhkan delapan jalur bus data dan dua jalur bus
kontrol dipersingkat menjadi empat jalur bus data. Pada gambar dibawah ditunjukkan
Gambar 2.5 Antarmuka Bagian Output LCD
Display LCD 2x16 berfungsi sebagai penampil nilai kecapatan refferensi dan
kecepatan aktual yang dikirim dari mikrokontroler. LCD yang digunakan pada alat ini
mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character
2x16, dengan 16 pin konektor, yang didifinisikan sebagai berikut:
Gambar 2.6 LCD 2 x 16
Tabel 2.2 Fungsi PinLCD Character 2x16
PIN Nama Fungsi
1 VSS Ground voltage
3 VEE Contrast voltage
4 RS
Register Select
0 = Instruction Register
1 = Data Register
5 R/W
Read/ Write, to choose write or read
mode
0 = write mode
1 = read mode
6 E
Enable
0 = start to lacht data to LCD
character
1= disable
7 DB0 LSB
8 DB1 -
9 DB2 -
10 DB3 -
11 DB4 -
12 DB5 -
13 DB6 -
14 DB7 MSB
15 BPL Back Plane Light
Modul LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks
yang kita tuliskan ke modul LCD akan disimpan didalam memory ini, dan modul
LCD secara berturutan membaca memory ini untuk menampilkan teks ke modul LCD
itu sendiri.
Gambar 2.7 Peta MemoryLCDCharacter 2x16
Pada peta memori diatas, daerah yang berwarna biru ( 00 s/d 0F dan 40 s/d 4F)
adalah display yang tampak. jumlahnya sebanyak 16 karakter per baris dengan dua
baris. Angka pada setiap kotak adalah alamat memori yang bersesuaian dengan posisi
dari layar. Dengan demikian dapat dilihat karakter pertama yang berada pada posisi
baris pertama menempati alamat 00h. dan karakter kedua yang berada pada posisi
baris kedua menempati alamat 40h. Agar dapat menampilkan karakter pada display
maka posisi kursor harus terlebih dahulu diset. Instruksi Set Posisi Kursor adalah 80h.
dengan demikian untuk menampilkan karakter, nilai yang terdapat pada memory harus
ditambahkan dengan 80h.
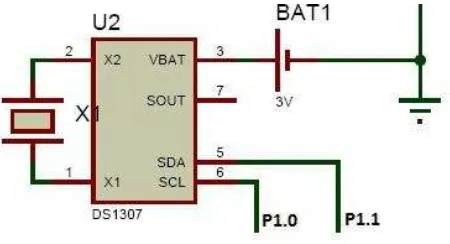
2.3.6. Bagian Real Time Clock (RTC) DS1307
RTC adalah jenis pewaktu yang bekerja berdasarkan waktu yang sebenarnya
atau dengan kata lain berdasarkan waktu yang ada pada jam kita. Agar dapat
berfungsi, pewaktu ini membutuhkan dua parameter utama yang harus ditentukan,
Gambar 2.8 Antarmuka Bagian RTC DS1307
DS1307 merupakan salah satu tipe IC RTC yang dapat bekerja dalam daya
listrik rendah. Di dalamnya berisi waktu jam dan kalender dalam format BCD. Waktu
jam dan kalender memberikan informasi detik, menit, jam, hari, tanggal, bulan, dan
tahun. Pendeteksi sumber listrik juga disediakan untuk mendeteksi kegagalan sumber
listrik dan langsung mengalihkannya ke sumber baterai. RTC difungsikan sebagai
penyimpan data jam walaupun sumber tegangan utama mati atau rusak. DS1307 dapat
dijalankan dalam aturan 12 jam atau 24 jam. RTC DS1307 hanya diprogram satu kali
dimana waktu selanjutnya secara otomatis diperbaharui.
2.3.7. Perancangan Sensor Arus
Pengukuran arus biasanya membutuhkan sebuah resistor shuntyaitu resistor yang
dihubungkan secara seri pada beban dan mengubah aliran arus menjadi tegangan.
Tegangan tersebut biasanya diumpankan ke current transformer terlebih dahulu sebelum masuk ke rangkaian pengkondisi sinyal.
Teknologi Hall effect yang diterapkan oleh Allegro menggantikan fungsi resistor shunt dan current transformer menjadi sebuah sensor dengan ukuran yang relatif jauh lebih kecil. Aliran arus listrik yang mengakibatkan medan magnet yang
menginduksi bagian dynamic offset cancellation dari ACS712 ELC-5A. bagian ini akan dikuatkan oleh amplifier dan melalui filter sebelum dikeluarkan melalui kaki 6
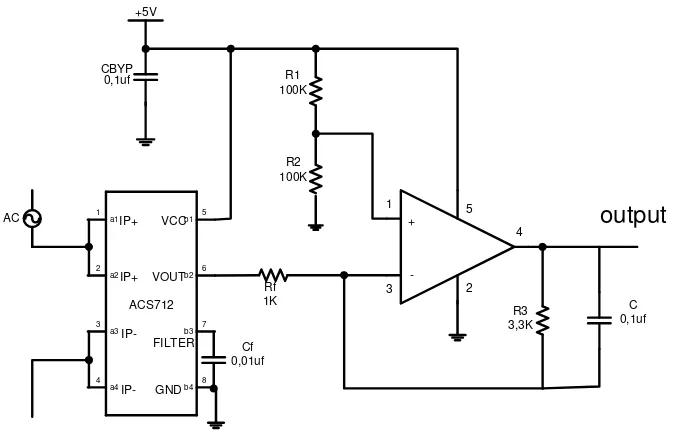
Gambar 2.9 Rangkaian Aplikasi Sensor Arus ACS 712 ,5 Ampere
Dari gambar 2.9 rangkaian aplikasi IC ACS 712 diatas, didapatkan hasil output
tegangan DC. Tegangan output sensor terlalu kecil, maka diperlukan penguatan agar
hasil output sensor menjadi lebih besar. Rangkaian penguatan berupa Op- Amp
LM321. output C 0,1uf a1 1 a2 2 3 a3 4 a4 b1 b2 b3 b4 5 6 7 8 AC IP+ IP-IP+ VCC VOUT FILTER GND ACS712 +5V CBYP 0,1uf R1 100K R2 100K + -Rf 1K Cf 0,01uf 1 2 3 4 5 R3 3,3K
Gambar 2.10 Konfigurasi Pin LM321 dan Rangkaian Inverting Amplifier
Gambar 2.10 menunjukkan rangkaian sensor arus ACS 712 dengan keluaran 5
ampere lengkap dengan rangkaian inverting amplifier. Karena siyal tegangan output
dari IC ACS712 5 Ampere inverting maka menggunakan rangkaian inverting
) ... (1)
Jika penguatan (gain) sebesar 3 kali maka:
Sehingga
= 3
Ditetapkan terlebih dahulu
2.3.8. Rangkaian Driver Motor Servo MG996R
Motor servo mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut
pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty
cycle sinyal PWM pada bagian pin kontrolnya.
Rangkaian mikrokontroler yang digunakan adalah ATmega8535 yang
merupakan pusat pengolahan data dan pusat pengendali. Dalam rangkaian
mikrokontroler ini terdapat empat buah port (A,B,C, D) yang dapat digunakan untuk
menampung input atau output data. Port A digunakan sebagai input data,Port B.0
dan B.1 digunakan untuk mengontrol motor servo. Motor servo yang digunakan
adalah motor servo standar 1800 seperti pada Gambar dibawah.
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW)
dengan defleksi masing-masing sudut mencapai 900, sehingga total defleksi sudut
dari kanan–tengah–kiri adalah 1800 . untuk mengatur motor servo MG99R ini perlu
dilakukan perhitungan. Dimana posisi awal motor servo atau 00 adalah bernilai 900
(tergantung dari jenis dan merk motor servo) dan posisi akhir atau 1800 adalah bernilai
3100. Sehingga untuk menggerakkan motor servo setiap derajatnya 3100-900/1800 =
12,2 per derajat. Maka nilai yg diberikan pada servo untuk menggerakan 10 yaitu
sebesar 12,2
Gambar 2.12 Gambar Rangkaian Motor Servo
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai
delay yang kita berikan. Untuk membuat servo pada posisi center, berikan pulsa
1.5ms. Untuk memutar servo ke kanan, berikan pulsa <=1.3ms, dan pulsa >= 1.7ms
untuk berputar ke kiri dengan delay 20ms. Apabila beban lebih besar daripada torsi
maksimal motor servo, maka motor servo tidak dapat bergerak dan dapat
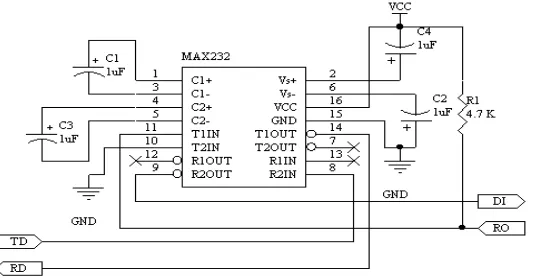
2.3.9. Rangkaian RS 232
Komunikasi serial merupakan hal yang penting dalam sistem embedded, karena
dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler
dengan devais lainnya. Port serial pada mikrokontroller terdiri atas dua pin yaitu RXD
dan TXD, RXD berfungsi untuk menerima data dari komputer/perangkat lainnya,
TXD berfungsi untuk mengirim data ke komputer/perangkat lainnya.
Gambar 2.13 MAX232 Dalam Rangkaian
Standar komunikasi serial untuk komputer ialah RS-232, RS-232 mempunyai
standar tegangan yang berbeda dengan serial port mikrokontroler, sehingga agar
sesuai dengan RS-232 maka di butuhkan suatu rangkaian level converter, IC yang digunakan bermacam-macam, tetapi yang paling mudah dan sering digunakan ialah IC
MAX232/HIN232.
2.4. Perangkat Lunak
Adapun perangkat lunak yang digunakan dalam dalam tugas akhir ini adalah sebagai
berikut:
2.4.1. CodeVision AVR
Untuk menguji dan menjalankan program pada mikrokontroler AVR maka dapat
Untuk compiler yang digunakan dalam program mikrokontroler AVR pada alat ini menggunakan software CodeVisionAVR. software ini memiliki berbagai fitur yang
dapat membantu kita dalam membuat program yang akan kita masukkan ke dalam
mikrokontroler kelas AVR. CodeVision AVR mempunyai suatu keunggulan dari
compiler lain, yaitu adanya codewizard. Fasilitas ini memudahkan kita dalam
inisialisasi mikrokontroler yang akan kita gunakan.
Mikrokontroler atmega 8535 merupakan bagian dari mikrokontroler AVR,
dimana mikrokontroler buatan Atmel ini menggunakan arsitektur RISC (Reduce
Instruction Set Computer) artinya prosesor ini memiliki set instruksi program yang
lebih sedikit dibandingkan dengan MCS-51 yang menerapkan arsitektur CISC
(Complex Instruction Set Computer). Menurut Iswanto (2008) hampir semua instruksi
prosesor RISC adalah instruksi dasar namun belum tentu sederhana, sehingga
instruksi-instruksi ini umumnya hanya memerlukan satu siklus mesin untuk
menjalankannya. Kecuali instruksi percabangan yang membutuhkan dua siklus mesin
dan RISC biasanya dibuat dengan arsitektur Harvard, karena arsitektur ini yang memungkinkan untuk membuat eksekusi instruksi selesai dikerjakan dalam satu atau
dua siklus mesin, sehingga akan semakin cepat dan handal. Meskipun
CodeVisionAVR termasuk software komersial, namun kita tetap dapat
menggunakannya dengan mudah karena terdapat versi evaluasi yang disediakan
secara gratis walaupun dengan kemampuan yang dibatasi. Menurut Bejo (2008) dari
beberapa software kompiler C yang pernah digunakannya, CodeVisionAVR
merupakan yang terbaik bila dibandingkan dengan kompiler-kompiler yang lain
karena beberapa kelebihan yang dimiliki oleh CodeVisionAVR antara lain:
1. Menggunakan IDE (Integrated Development Environment).
2. Fasilitas yang disediakan lengkap (mengedit program, mengkompile
program, mendownload program) serta tampilannya terlihat menarik dan
mudah dimengerti. Kita dapat mengatur editor sedemikian rupa sehingga
membantu memudahkan kita dalam penulisan program.
3. Mampu membangkitkan kode program secara otomatis dengan
menggunakan fasilitas CodeWizardAVR.
4. Memiliki fasilitas debugger sehingga dapat menggunakan software
5. Memiliki terminal komunikasi serial yang terintegrasi dalam
CodeVisionAVR sehingga dapat digunakan untuk membantu pengecekan
program yang telah dibuat khususnya yang menggunakan fasilitas
komunikasi serial UART.
2.5. Penelitian Pembahasan Solar Tracker
Beberapa penelitian Solar Tracker yang relevan dengan penelitian yang diangkat dalam karya ilmiah ini adalah sebagai berikut:
1. Midriem dan Andry (2011), mengatakan dalam penelitiannya yang bertujuan
untuk menciptakan alat pelacak sinar matahari dengan energi yang hemat beserta
fasilitas telekontrolnya dengan mengkombinasikan timer dan sensor cahaya.
Sehingga tegangan yang diperoleh lebih maksimum dan untuk efisiensi tegangan
maksimum dapat menggunakan motor DC berdaya rendah dalam menggerakkan
alat. Ini membuat energi yang terbuang untuk mensuplai motor DC menjadi lebih
kecil. Untuk mengontrol arah pergerakan matahari yang sewaktu-waktu dapat
dipengaruhi oleh cuaca maka digunakan modul sensor cahaya dan ketika
mendung ini mengurangi intensitas cahaya pada panel surya sehingga diperlukan
timer untuk mengatasi kondisi ini agar pencahayaan tetap stabil. Pengendalian
jarak jauh dapat menggunakan wifi. Sehingga memudah kan untuk mengawasi
suhu dan memeriksa energi yang dihasilkan dari jarak yang jauh. Dalam
penelitiannya diperoleh sinyal keluaran 0-4 volt saat cuaca cerah dan 3,3 – 3,9
volt saat mendung kemudian 1,5-3,3 ketika cuaca agak cerah.
2. Rif'an dan Sholeh (2012), dalam penelitiannya yang bertujuan untuk
menghasilkan energi yang paling besar yang dihasilkan oleh tenaga matahari
melalui solar tracker ketika sudut deviasinya lima derajat. Energi keluar yang dihasilkan yaitu 6.127. merupakan energi terbesar yang didapat dari penelitian ini.
Untuk mendapatkan hasil sesuai dengan keinginan maka disarankan menentukan
sudut sinar datang. Misalkan diasumsikan sehari sel surya mendapatkan energi
selama 12 jam, dari timur ke barat (180º). Jika sel surya digerakkan untuk
digerakkan setiap 1 jam 20 menit. Jika sel surya digerakkan untuk menjaga sudut
datang selalu dibawah atau sama dengan 20º, maka sel surya perlu digerakkan
setiap 2 jam 40 menit. Dapat diketahui penentuan sudut datang sinar matahari
sangat mempengaruhi pergerakkan solar tracker untuk mendapatkan energi matahari secara optimal jika menggunakan timer.
3. Budi (2005), mengatakan dalam penelitiannya tentang cara mengoptimalkan sel
surya untuk mendapatkan energi maksimal menggunakan sistem pelacak yaitu
dengan mengatur posisi solar sel terhadap matahari. Untuk mengatur posisi
tersebut dibantu dengan mikrokontroler. Dari hasil penelitiaannya juga
mengatakan energi lebih besar diperoleh pada solar tracker dinamis dibandingkan
solar tracker statis. Peningkatan keluaran energi jika dibandingkan dengan panel pada posisi statis adalah sebesar 14,98% pada pengukuran I dan 13,37% pada
pengukuran II. Ini menunjukkan bahwa hasil sel surya dinamis lebih maksimal
daripada hasil energi yang dihasilkan sel surya statis. adapun dalam penelitiannya,
peneliti menggunakan sensor cahaya dan kombinasinya dalam menggeserkan sel