INTISARI
Kebutuhan masyarakat pada alat transportasi yang aman dan nyaman, mendorong terus
berkembangnya teknologi dibidang otomotif. Saat ini masyarakat menggunakan kendaraan
dengan bahan bakar minyak. namun cadangan minyak bumi semakin menipis dantingginya
polusi yang disebabkan oleh asap kendaraan. maka dari itu, dikembangkanlah teknologi mobil
listrik.untuk mengatasi kendaraan yang aman dibutuhkan suatu pengereman pada motor listrik.
Sistem pengereman ini menggunakan prototipe dengan supplai 12v dan pengereman
menggunkanan resistor sebagai acuannya. Sistem pengereman ini melalui beberapa proses
analisis diantaranya perhitungan nilai resistor, menimbang berat prototipe, pengecekan sistem,
percobaan kecepatan motor, dan waktu berhenti.
Sistem pengereman motor listrik menggunakan resistor menghasilkan nilai kecepatan dan berhentinya prototype dengan nilai resistor sebesar 0Ω, 0,12Ω, 0,15Ω, 0,39Ω, 0,47Ω. Pengereman pada motor listrik bekerja dengan baik. alat tersebut berhenti pada jarak 35cm.
ABSTRACT
The needs of people on a means of transportation a safe and comfortable , continue to encourage
the development in the fields of automotive technology .Currently the community using vehicles
with fuel oil . But oil deposit depleting dantingginya pollution caused by vehicles smoke . Then
from it , dikembangkanlah car listrik.untuk technology overcome a safe vehicle is required a
braking on an electric motor .
System braking use prototypes with 12v supply and braking menggunkanan resistor as
its.System braking through some process of analysis of them calculation of the value of resistor,
weighing heavily prototype, checking system, experiment motor speed, and quitting time.
Braking system an electric motor using resistor produce the value of speed and the cessation of
prototype resistor with a value of as much as 0Ω, 0,12Ω, 0,15Ω, 0,39Ω, 0,47Ω. Braking in an
electric motor work well if this instrument stop at 35cm.
i
TUGAS AKHIR
MODEL PENGEREMAN MOBIL LISTRIK
BERBASIS MIKROKONTROLER ATMEGA8535
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
Mastok Debian Vitrali
NIM : 105114032
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
MODEL BREAKING CAR ELECTRIC
USING MICROCONTROLER ATMEGA8535
Presented As Partial Fulfillment Of The Requirement
To Obtain The Sarjana Teknik Degree
In Electrical Engineering Study Program
Mastok Debian Vitrali
NIM : 105114032
ELECTRICAL ENGINEERING STUDY PROGRAM
FACULTY SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO
SEMUA BERAWAL DARI HAL TERKECIL
viii
INTISARI
Kebutuhan masyarakat pada alat transportasi yang aman dan nyaman, mendorong terus
berkembangnya teknologi dibidang otomotif. Saat ini masyarakat menggunakan kendaraan
dengan bahan bakar minyak. namun cadangan minyak bumi semakin menipis dantingginya
polusi yang disebabkan oleh asap kendaraan. maka dari itu, dikembangkanlah teknologi mobil
listrik.untuk mengatasi kendaraan yang aman dibutuhkan suatu pengereman pada motor listrik.
Sistem pengereman ini menggunakan prototipe dengan supplai 12v dan pengereman
menggunkanan resistor sebagai acuannya. Sistem pengereman ini melalui beberapa proses
analisis diantaranya perhitungan nilai resistor, menimbang berat prototipe, pengecekan sistem,
percobaan kecepatan motor, dan waktu berhenti.
Sistem pengereman motor listrik menggunakan resistor menghasilkan nilai kecepatan dan
berhentinya prototype dengan nilai resistor sebesar 0Ω, 0,12Ω, 0,15Ω, 0,39Ω, 0,47Ω.
Pengereman pada motor listrik bekerja dengan baik. alat tersebut berhenti pada jarak 35cm.
ix
ABSTRACT
The needs of people on a means of transportation a safe and comfortable , continue to encourage
the development in the fields of automotive technology .Currently the community using vehicles
with fuel oil . But oil deposit depleting dantingginya pollution caused by vehicles smoke . Then
from it , dikembangkanlah car listrik.untuk technology overcome a safe vehicle is required a
braking on an electric motor .
System braking use prototypes with 12v supply and braking menggunkanan resistor as
its.System braking through some process of analysis of them calculation of the value of resistor,
weighing heavily prototype, checking system, experiment motor speed, and quitting time.
Braking system an electric motor using resistor produce the value of speed and the cessation of
prototype resistor with a value of as much as 0Ω, 0,12Ω, 0,15Ω, 0,39Ω, 0,47Ω. Braking in an
electric motor work well if this instrument stop at 35cm.
x
KATA PENGANTAR
Puji dan Syukur kepada Tuhan Yesus karena telah memberikan Berkat-Nya sehingga
penulis dapat menyelesaikan laporan tugas akhir dengan baik, dan dapat memperoleh gelar
sarjana.
2. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma.
3. Petrus Setyo Prabowo, S.T., M.T., selaku Ketua Program Studi Teknik Elekro
Universitas Sanata Dharma
4. Pius yozy merucahyo S.T, M.T, selaku dosen pembimbing yang dengan tenang dan
penuh kesabaran untuk membimbing dalam menyelesaikan penulisan Tugas Akhir ini.
5. Dr. Linggo sumarno, Wiwien Widyastuti, S.T., M.T., selaku dosen penguji yang telah
memberikan bimbingan, saran, dan merevisi Tugas Akhir ini.
6. Maria susi tri handayani, ibu yang selalu sabar menghadapi anaknya dan selalu
memberikan doa dan semangat.
7. Darmaji, ayah yang selalu mensuport dan selalu membantu disaat susah dan senang.
8. Krisnita yuliani, adik yang menjadikan acuan untuk selalu menyelesaikan tigas akhir ini.
9. Annisa Virginia oktaviani, terima kasih yang selalu sabar menghadapi penulis disaat
susah. Dan terima kasih atas dukungan dan doanya yang selalu menyertai.
10.Rake silveria yang selalu membantu dan mendukung mengerjakan skripsi ini.
11.Seluruh staff sekretariatdan laboratorium FST yang selalu membantu dan menyiapkan
alat untuk pengambilan data.
12.Burjo paingan yang selalu memberikan energi dan tempat untuk bersenda gurau kepada
xii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... ii
HALAMAN PENGESAHAN ... iii
PERNYATAAN KEASLIAN KARYA ... iv
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ………vi
INTISARI ... vii
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ... 2
1.5 Batasan Masalah ... 2
1.6 Metodologi Penelitian ... 3
BAB II DASAR TEORI... 5
2.1 Mobil Listrik ... 5
xiii
2.3 Model Pengereman Menggunakan Hambatan Pada Sistem ... 5
2.4 Metode Pengereman Motor Listrik ... 6
2.5 Metode Pengereman Secara Plugging ... 6
2.6 Metode Pengereman Dinamis ... 6
2.7 Teori Fisika pada Motor DC ... 6
2.8 Komponen pada Prototype Kendaraan Mobil Listrik ... 10
2.8.1Motor DC ... 11
2.8.2Motor DC sebagai generator ... 12
2.8.3Sensor jarak ultrasonic PING... 14
2.8.4Mikrokontroller AVR ATmega8535 ... 15
2.8.4.1Konfigurasi Pin ATmega8535 ... 16
2.8.4.2Peta Memory ATmega8535 ... 19
2.8.4.3Memory Data ... 19
BAB III PERANCANGAN ... 21
3.1. Perancangan Sistem ... 21
3.2Perancangan Modul Relay ... 23
3.3Rangkaian Relay Sebagai Saklar ... 24
3.4Rangkaian Mikrokontroller ATmega8535 ... 26
3.5Flowchart Sistem Pengendali Rem ... 27
xiv
3.6.1Menentukan Nilai Resistor ... 30
3.6.2Motor DC sebagai Generator ... 32
3.6.3Desain mobil ... 32
BAB IV HASIL DAN PEMBAHASAN ... 33
4.1. Perangkat sistem pengereman motor listrik ... 33
4.1.1perangkat pendukung ... 35
4.2. Data Pengujian dan pembahasan ... 36
4.2.1Pengecekan Sistem Relay ... 36
4.2.1.1Pengecekan Modul Relay ... 36
4.2.1.2Pengecekan Pembalik Putaran ... 37
4.2.1.3Pengecekan Pemutus Arus ... 38
4.2.1.4Pengecekan Motor ... 38
4.3. Perhitungan Nilai Resistor ... 39
BAB V KESIMPULAN DAN SARAN ... 48
5.1Kesimpulan ... 48
5.2Saran ... 49
DAFTAR PUSTAKA ...
LAMPIRAN
xv
DAFTAR GAMBAR
Gambar 2.1 Sistem Torsi ... 7
Gambar 2.2 Gaya Lorenz ... 11
Gambar 2.3 Gerak Motor DC ... 12
Gambar 2.4 Generator DC ... 13
Gambar 2.5 Gelombang Generator DC ... 13
Gambar 2.6 Sensor PING ... 14
Gambar 2.7 Pin Mikrokontroller... 16
Gambar 2.8 Peta Memori Mikrokontroller ... 19
Gambar 2.9 Data Mikrokontroller ... 20
Gambar 3.1 Sistem Model Pengereman Motor Listrik ... 21
Gambar 3.2 Rangkaian Modul Relay... 23
Gambar 3.3 Rangkaian Pemutus Arus ... 24
Gambar 3.4 Rangkaian Keseluruhan Sistem ... 25
Gambar 3.5 Rangkaian Mikrokontroller ... 27
Gambar 3.6 Flowchart sistem Mikrokontroller ... 28
Gambar 3.8 Desain Model Mobil ... 32
Gambar 4.1 Modul Relay ... 33
Gambar 4.2 Rangkaian Pemutus Arus ... 34
Gambar 4.3 mikroAVR ... 34
Gambar 4.4 rangkaian Pembalik Arus ... 35
Gambar 4.5 Kabel Penghubung ... 35
Gambar 4.6 Sensor PING ... 36
xvi
Gambar 4.8 Pengecekan Motor... 38
xvii
DAFTAR TABEL
Tabel 2.1 Konfigurasi pin ATmega8535 ... 16
Tabel 4.1 Modul Relay ... 37
Tabel 4.2 Pembalik Putaran ... 37
Tabel 4.3 Pemutus Arus ... 38
Tabel 4.4Waktu Motor Berhenti Motor dari Titik Awal Sampai Prototype Diam ... 39
Tabel 4.5 Data Jarak Berhenti Mobil ... 43
Tabel 4.6 Data persentasi kesalahan ... 44
Tabel 4.7 Nilai waktu terhadap Resistor ... 46
1
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Kebutuhan masyarakat pada alat transportasi yang aman dan nyaman,
mendorong terus berkembangnya teknologi di bidang otomotif. Tingkat
mobilisasi masyarakat yang tinggi menjadi alasan dibutuhkannya kendaaran
yang aman dan nyaman. Saat ini masyarakat masih menggunakan kendaraan
dengan bahan bakar minyak. Namun cadangan minyak bumi mulai menipis
dan semakin tingginya tingkat polusi yang disebabkan oleh asap kendaraan.
Maka dari itu, dikembangkanlah teknologi mobil listrik.
Selain mengubah sistem pembakaran mobil dari bahan bakar minyak
ke listrik, tingkat keamanan dan kenyamanan pengguna juga menjadi tolak
ukur pengembangan teknologi mobil listrik. Sebagai contoh, semakin
tingginya tingkat kecepatan sebuah kendaraan maka resiko terjadinya
kecelakaan juga semakin tinggi. Oleh karena itu, untuk mengurangi resiko
kecelakaan maka dibuatlah sistem pengereman otomatis pada kendaraan.
Permasalahan yang akan diteliti adalah bagaimana arus listrik
menurunkan kecepatan pada motor dan melakukan pengereman pada motor
tersebut. Hal itu untuk meminimilasi terjadinya kecelakaan yang sering
terjadi. Adapun beberapa peneliti yang pernah dilakukan antara lain oleh
Noer Soedjarwanto dan Osea Zebua dengan judul prototype mengereman
otomatis untuk mobil listrik dimana penguji merancang sistem pengereman
dengan pentedeksi sensor jarak ultrasonic [1]. Selain itu, penelitian yang
dilakukan oleh ian hardianto siahaan dengan metode ABS (antilock
Berdasarkan jurnal tersebut, penulis ingin merancang dan
menganalisis prototype pengereman mobil listrik dengan metode sensor
jarak untuk mendeteksi halangan dan metode pengereman pembebadan
daya.
1.2. Rumusan Masalah
Dari latar belakang tersebut diperoleh rumusan masalah, yaitu
bagaimana merancang dan menganalisis pengereman motor dengan sensor
jarak sebagai pendeteksi dan pembebanan pada daya, dengan kecepatan dan
berat protype konstan.
1.3. Tujuan Penelitian
Tujuan penelitian ini adalah untuk menganalisis dan merancang
pengereman motor dengan menggunakan beban yang telah ditentukan.
Sistem ini digunakan pada keadaan darurat seperti pengendara kurang dalam
keadaan lelah saat berkendara dan tidak siap dalam melakukan pengereman.
1.4. Manfaat Penelitian
Manfaat penelitian ini untuk mendeteksi pengereman motor dan bisa
diimplementasikan pada kendaraan agar para pengendara bisa
memanfaatkan sistem tersebut untuk keamanan pada kendaraannya jika
terjadi kelalaian saat berkendara.
1.5. Batasan Masalah
Permasalahan yang dibahas pada penelitian ini dibatasi pada :
1. Menggunakan prototype dalam pembuatan dan analisis pengereman
motor
2. Motor DC 12v
3. Rangkaian prototype dalam pada gear dan sistem sudah ditetapkan
4. Kecepatan prototype konstan 3.873 m/s pada jarak 2m
5. Berat prototype 123,6 gram
6. Power supply 12v
1.6. Metodologi Penelitian
Metodologi penelitian yang digunakan oleh perancang pada analisis
ini adalah :
1. Studi literatur
Mengumpulkan berbagai macam referensi dan mempelajari teori
yang mendukung penulisan tugas akhir, seperti :
a. Teori kendaraan motor listrik
b. Metode pengereman motor listrik
c. Teori rangkaian listrik
d. Teori fisika
e. Teori motor dan generator DC
2. Perencanaan sistem
Pada tahap ini perancang menyiapkan rancangan sistem yang
akan digunakan untuk melakukan percobaan. Perancangan yang
dibuat adalah rangkaian modul relay, system mikrokontroller, dan
perhitungan pembebanan resistor.
3. Pengukuran dan pengumpulan data
Menggunakan metode observasi dan dokumentasi untuk
melakukan pengukuran parameter pada data yang diambil. Seperti
pada jurnal – jurnal dan dasar teori pada daftar pustaka. Data
diperoleh dari hasil pengujian. Pengambilan data menggunakan
stopwatch sebagai acuan untuk mendapatkan nilai waktu dan
membuat lintasan sebagai penentu jarak yang diperoleh. Pengujian
dengan cara mendeteksi jarak yang ditentukan dan mengaktifkan
modul relay yang terhubung dengan pembebanan dan terjadi
perlambatan pada motor kemudian menjadi pengereman.
4. Analisis data
Melakukan analisis perancangan pada pengereman motor listrik
5. Hasil dan kesimpulan
Pada metode ini dilakukan penarikan kesimpulan dari hasil
BAB II
DASAR TEORI
2.1. Mobil Listrik
Mobil listrik adalah mobil atau kendaran yang digerakkan oleh motor
listrik. Penggerak motor listrik yang bergerak digerakkan oleh energy listrik
yang disimpan pada suatu batre atau penyimpan energy lainnya. Kelebihan
dari mobil listrik ini adalah kendaraan ini ramah lingkungan dan bebas
polusi. Sistem yang terhubung pada kendaraan mobil ini terhubung oleh
daya arus listrik yang terhubung. Mulai dari sistem pencahayaan sampai
pada pengereman pada motor listrik. Model pengereman pada kendaraan
sangat dibutuhkan untuk mengantisipasi agar tidak terjadi kecelakaan.
Sistem pengereman pada mobil ada tiga cara, diantarannya menggunakan
sensor jarak ultrasonic dan menggunakan hambatan pada sistem.
2.2. Model Pengereman dengan Sensor Jarak Ultrasonic
Pada sistem ini sensor jarak ultrasonic memberikan sinyal yang nanti
di proses pada mikrokontroller. Sinyal PWM dari mikrokontroller
digunakan untuk mengatur kecepatan motor DC. Tampilan jarak pada
kendaraan dan hambatan dapat dibuat dengan menggunakan LED atau
buzzer sebagai indicator jarak aman.
2.3. Model Pengereman Menggunakan Hambatan pada Sistem.
Pada sistem ini hamper sama dengan penjelasan sebelumnya dengan
menggunakan sensor jarak ultrasonic yang dipancarkan dan data diolah pada
mikrokontroller. Yang membedakan adalah model pengereman ini
menggunakan pengereman bertahap dengan cara mengaktifkan tiap
hambatan – hambatan secara bertahap yang dihubungkan pada arus daya
2.4. Metode Pengereman Motor Listrik
Metode pengereman motor listrik menggunakan sistem elektrik
mempunyai dua cara, diantaranya dengan metode pengereman dinamis dan
dengan metode pluging. Masing – masing metode ini mempunyai kelebihan
dan kekurangan masing – masing namun mempunyai tujuan yang sama
yaitu sama – sama bertujuan untuk menghentikan putaran motor.
2.5. Metode Pengereman Secara Plugging
Metode ini mampu menghentikan motor lebih cepat. Prinsip kerjanya
adalah membalikkan arus angker dengan cara membalik terminal sumber.
Sehingga akan didapat kondisi motor berputar balik seiring polaritas sumber
terbalik [3].
2.6. Metode Pengereman Dinamis
Pengereman ini dilakukan dengan melepaskan jangkar yang berputar
dan sumber tegangan kemudian memasangkan tahanan pada terminal
jangkar [3].
2.7. Teori FIsika pada Motor DC
Teori fisika yang mencakup pada motor DC diantarannya gaya, torsi,
kecepatan dan percepatan
2.7.1. Gaya
Gaya adalah perubahan atau pergeseran benda bermassa yang
berpindah dari satu tempat ke tempat lainnya pada keadaan diam. Satuan
gaya sering dilambangkan newton (N). Terjadinya gaya dipengaruhi oleh
suatu massa dan percepatan pada suatu benda. Seperti yang dijelaskan pada
hokum newton II dimana percepatan yang timbul pada suatu benda karena
pengaruh suatu gaya tertentu, besarnya berbanding lurus dan searah dengan
gaya itu dan berbanding terbalik dengan massa benda [4].
(2.1)
F = gaya yang bekerja pada benda (newton)
m = massa benda (kg)
a = percepatan pada benda (m/det2 )
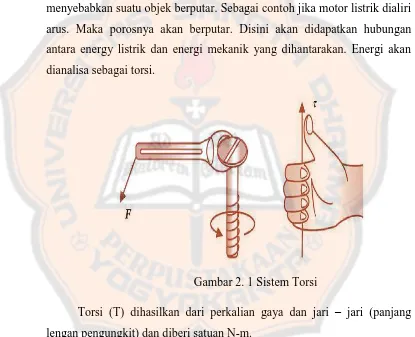
2.7.2. Torsi
Torsi atau yang sering disebut juga momen adalah gaya putar yang
menyebabkan suatu objek berputar. Sebagai contoh jika motor listrik dialiri
arus. Maka porosnya akan berputar. Disini akan didapatkan hubungan
antara energy listrik dan energi mekanik yang dihantarakan. Energi akan
dianalisa sebagai torsi.
Gambar 2. 1 Sistem Torsi
Torsi (T) dihasilkan dari perkalian gaya dan jari – jari (panjang
lengan pengungkit) dan diberi satuan N-m.
T = Fxr (2.2)
Dimana :
T = torsi(Nm)
r = jari – jari(m)
Tenaga yang diubah ke dalam tenaga mekanik dalam jangkar adalah = Eb Ia
watt [5]. Jadi :
Formula diatas berlaku untuk motor DC dan generator DC.
2.7.3. Kecepatan
Suatu objek yang bergerak akan menempuh jarak tertentu dalam
waktu yang ditentukan. Kecepatan adalah perbandingan jarak tempuh dan
waktu yang digunakan untuk menempuhnya. Kecepatan mempengaruhi
Kecepatan rata – rata adalah perbandingan antara jarak yang
ditempuh oleh suatu benda terhadap waktu yang diperlukan, dengan tidak
memperhatikan jenis gerakan yang dilakukan [4].
(2.4)
v = kecepatan rata – rata (m/s)
X = jarak yang ditempuh (m)
t = waktu yang diperlukan (s)
2.7.4. Percepatan
Suatu objek dapat berubah kecepatannya. Perubahan kecepatan ini
disebut dengan percepatan. Percepatan hanya terjadi ketika ada perubahan
pada gaya total( gaya bersih) yang bekerja pada objek, yang
menyebabkjan perubahan kecepatan. Suatu objek dapat juga berubah dari
kecepatan tinggi ke kecepatan yang lebih rendah. Hal ini deisebut dengan
perlambatan (deceleration / negative acceleration). Percepatan
didefinisikan sebagai perubahan kecepatan persatuan waktu [4].
(2.5)
v = perubahan kecepatan (m/s)
Karena perlambatan dan nilai x0 = 0, maka
(2.6)
2.7.5 Energi Listrik
Energi listrik dapat berubah menjadi bentuk energi lain. Untuk mengubah energi listrik menjadi energi lain diperlukan alat listrik yang memiliki sebuah hambatan. Hambatan R yang dialiri listrik I akan menimbulkan beda tegangan V antara ujung – ujungnya [4]. Energi listrik sebanding dengan tegangan listrik (v), kuat arus listrik (i), dan waktu (t). secara matematis pernyataan tersebut dapat dinyatakan sebagai berikut.
W = V . I. t
Karena menurut hokum ohm I = V/R atau V= I.R, maka persamaan tersebut dapat diturunkan menjadi persamaan berikut.
(2.7)
Keterangan :
W = energi listrik (joule)
V = tegangan listrik (volt)
I = kuat arus listrik (ampere)
t = selang waktu (s)
R = hambatan listrik (ohm)
2.8. Komponen pada Prototype Kendaraan Mobil Listrik
Prototype penting yang ada dalam perancangan sistem kendaraan
mobil listrik ini meliputi motor DC sebagai pengendali mesin, sensor jarak
ultrasonic sebagai pembaca jarak halangan, resistor sebagai sistem
rangkaian pada hambatan, relay sebagai pengubah atau saklar untuk
memindahkan arus pada hambatan, dan mnikrokontroller sebagai otak dari
2.8.1. Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah
energi listrik menjadi energi mekanik [3].Motor DC adalah motor listrik
yang bergerak pada direct current (DC) electricity atau arus listrik arus
searah. Beda tegangan pada kedua terminal mengakibatkan rotor berputar
tergantung polaritas suatu tegangan tersebut. Polaritas dari tengangan yang
diberikan pada dua terminal menentukan arah perputaran motor, sedangkan
besar beda tegangan pada terminal menentukan kecepatan motor.
Bagian motor DC mempunyai dua macam, diantrannya:
1. Bagian yang tetap atau yang sering disebut stator. Bagian ini
menghasilkan medan magnet. Medan magnet yang dihasilkan
dari sebuah magnet permanen.
2. Bagian yang berputar atau yang sering disebut rotor. Bagian ini
berupa sebuah koil yang dialiri arus listrik.
Dasar teori gaya yang dihasilkan motor DC menggunakan gaya
Lorenz dimana gaya akan timbul jika penghantar listrik dilewatkan
pada suatu medan magnet. Arah gaya mengikuti aturan tangan kanan
ampere. Ibu jari menunjukkan arus listrik (I), telunjuk menunjukkan
medan magnet (B), jari tengah menunjukkan gaya Lorenz (F).
Gambar 2. 2 Gaya Lorentz
Jika sebuah penghantar dialiri arus listrik dan berada pada medan
magnet maka akan timbul gaya magnetic atau yang sering disebut gaya
Lorenz. Arah gaya Lorenz selalu tegak lurus dengan arah kuat arus listrik
maju skrup yang diputar dari vector arah gerak muatan listrik(v) kearah
medan magnet. Nilai α merupakan sudut yang dibentuk oleh nilai magnet
(B) dan arus listrik(I)
Teori Lorenz ini berlaku pada motor listrik. Beda potensial atau
tegangan yang dihasilkan antara dua terminal mengalirkan arus listrik dari
arus positif ke arus negative melewati terminal sikat dan lilitan. Arus listrik
diimplementasikan dengan arus yang berwarna merah. Kemudian
mengikuti arus listrik yang mengalir pada lilitan dalam medan magnet dan
terjadilah perputaran secara terus menerus pada motor listrik.
Gambar 2. 3 Gerak Motor DC
2.8.2. Motor DC sebagai generator
Generator adalah suatu sistem yang menghasilkan tenaga listrik
dengan masukkan tenaga mekanik [5].Motor DC sebagai generator
merupakan sistem listrik dinamis dimana energy mekanis diubah menjadi
energy listrik. Generator DC menghasilkan arus DC atau arus searah.
Prinsip kerja generator DC dapat melalui dua cara diantaranya
menggunakan cincin serat, yang menghasilkan tegangan induksi bolak
Gambar 2. 4 Generator DC
Jika rotor diputar dalam pengaruh medan magnet, maka akan terjadi
perpotongan medan magnet oleh lilitan kawat pada rotor. Hal ini akan
menimbulkan tegangan induksi. Tegangan induksi tersebar terjadi saat
rotor menempati posisi seperti gambar (a) dan (c). Pada posisi ini terjadi
perpotongan medan magnet secara maksimum oleh penghantar.
Sedangkan posisi jangkar pada gambar (b). akan menghasilkan tegangan
induksi nol. Hal ini karena tidak adanya perpotongan medan magnet
dengan penghantar pada jangar atau rotor. Daerah medan ini disebut
daerah netral.
Gambar 2. 5 Gelombang Generator DC (1)sinyal
AC,(2)sinyal DC
Jika ujung belitan rotor dihubungkan dengan slip – ring berupa dua
cincin (disebut juga dengan cincin seret). Seperti ditunjukkan pada gambar
Bila ujung belitan rotor dihubungkan dengan komulator satu cincin seperti
gambar (2) dengan dua belahan, maka dihasilkan listrik DC dengan dua
gelombang positif.
Rotor dengan generator DC akan menghasilkan tegangan induksi
bolak balik. Sebuah komulator berfungsi sebagai penyearah tegangan AC.
Besarnya tegangan yang dihasilkan oleh sebuah generator DC
sebanding dengan banyaknya putaran dan besarnya arus eksitasi (arus
penguat medan).
2.8.3. Sensor Jarak Ultrasonic PING
Sensor jarak ultrasonic ping adalah sensor yang memancarkan
ultrasonic 40Khz dan memantulkannya untuk mendeteksi jarak
didepannya. Sensor tersebut biasa diaplikasikan pada pengendali robot.
Sensor tersebut mempunyai empat kaki yang berguna untuk input 5v,
ground, keluaran sensor ultrasonic dan masukkan pantulan dari ultrasonic
tersebut yang d program melalui mikrokontroller.
Gambar 2. 6 Sensor PING
Sensor ini bekerja dengan cara mengirimkan ultrasonic 40Khz
selama waktu 200us kemudian setelah ada hambatan/ tembok di depannya,
ultrasonic memantul dan sensor tersebut menerima pantulan tersebut.
Spesifikasi sensor :
6. Measuring angle 15 Degree.
7. Input trigger signal 10us TTL pulse.
2.8.4. Miktokontroller AVR ATmega8535
Mikrokontroller ATmega8535 merupakan mikrokontroller
berteknologi CMOS 8-bit dengan kebutuhan daya rendah berbasis
arsitekture enchanced RISC AVR [6]. Sebagian besar menggunakan satu
siklus clock dan prosenya menggabungkan intruksi dengan 32 register
umum( general purpose register, GPRs) [7].
Beberapa fitur yang ada pada mikrokontroller ATmega8535 yaitu :
1. Port I/O 32 bit, dikelompokkan dalam portA, portB, portC, dan
portD.
2. Analog to digital converter 10-bit sebanyak 8 input.
3. Timer/counter berisi 3 buah.
4. CPU 8bit terdiri dari 32 register.
5. Watchdog timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memory flash sebesar 8Kbyte dengan kemampuan read while
write.
8. Interrupt internal maupun eksternal.
9. Port komunikasi SPI.
10.EEPROM sebesar 512 byte yang dapat deprogram saat operasi.
12.Komunikasi serial standar USART dengan kecepatan maksimal
2,5 Mbps.
13.Frekwensi clock maksimum 16MHz.
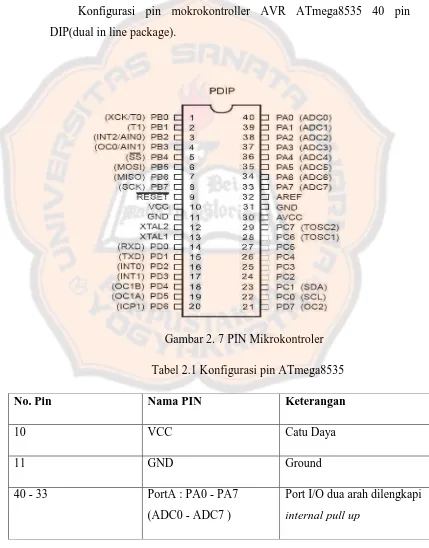
2.8.4.1. Konfigurasi Pin ATmega8535
Konfigurasi pin mokrokontroller AVR ATmega8535 40 pin
DIP(dual in line package).
Gambar 2. 7 PIN Mikrokontroler
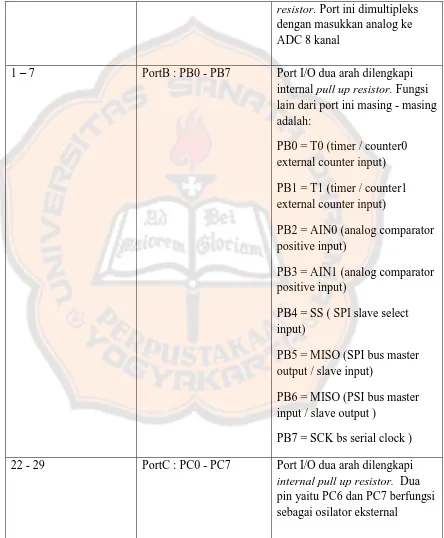
Tabel 2.1 Konfigurasi pin ATmega8535
No. Pin Nama PIN Keterangan
10 VCC Catu Daya
11 GND Ground
40 - 33 PortA : PA0 - PA7
(ADC0 - ADC7 )
Port I/O dua arah dilengkapi
Tabel 2.1 Konfigurasi pin ATmega8535(lanjutan)
resistor. Port ini dimultipleks
dengan masukkan analog ke ADC 8 kanal
1 – 7 PortB : PB0 - PB7 Port I/O dua arah dilengkapi internal pull up resistor. Fungsi lain dari port ini masing - masing adalah:
PB0 = T0 (timer / counter0 external counter input)
PB1 = T1 (timer / counter1 external counter input)
PB2 = AIN0 (analog comparator positive input)
PB3 = AIN1 (analog comparator positive input)
internal pull up resistor. Dua
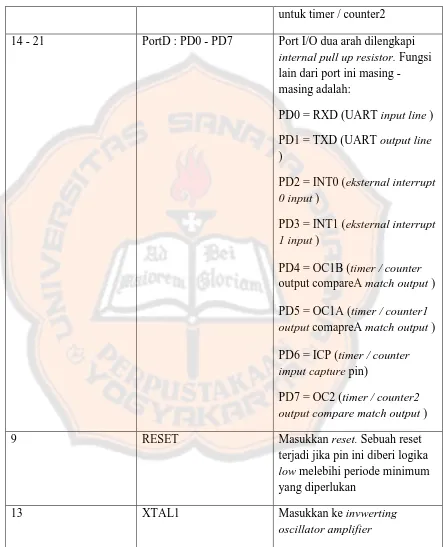
Tabel 2.1 Konfigurasi pin ATmega8535(lanjutan)
untuk timer / counter2
14 - 21 PortD : PD0 - PD7 Port I/O dua arah dilengkapi
internal pull up resistor. Fungsi
lain dari port ini masing - masing adalah:
PD0 = RXD (UART input line )
PD1 = TXD (UART output line )
PD2 = INT0 (eksternal interrupt
0 input )
PD3 = INT1 (eksternal interrupt
1 input )
PD4 = OC1B (timer / counter output compareA match output )
PD5 = OC1A (timer / counter1
output comapreA match output )
PD6 = ICP (timer / counter
imput capture pin)
PD7 = OC2 (timer / counter2
output compare match output )
9 RESET Masukkan reset. Sebuah reset terjadi jika pin ini diberi logika
low melebihi periode minimum
yang diperlukan
13 XTAL1 Masukkan ke invwerting
Tabel 2.1 Konfigurasi pin ATmega8535(lanjutan)
12 XTAL2 Keluaran dair inverting
oscillator amplifier
30 AVCC Catu daya untuk port A dan ADC
31 AGND Analog ground
32 AREF Referensi masukkan analog untuk ADC
2.8.4.2.Peta Memory Atmega 8535
Mikrokontroller atmenga8535 mempunyai dua memory diantaranya
memory program(memori flash) dan memory data(SRAM). Mikro ini
juga dilengkapi dengan memory EEPROM (electrically Erasable
programmable Read Only Memory) untuk penyimpanan data nonvolatile.
Memory EEPROM mempunyai lokasi terpisah dengan sistem register
alaamat, register data dan register control yang dibuat khusus untuk
2. 8 Peta Memori Mikrokontroler
2.8.4.3. Memory Data
1. Mempunyai 32 register keperluan umum (general
purpose register –GPR biasa disebut register file
didalam teknologi RISC).
2. Mempunyai 64 register untuk keperluan
input/output (I/O register).
3. Mempunyai 512 byte SRAM internal.
G
a
m
b
a
r
2
.
9
BAB III
PERANCANGAN ALAT
3.1. Perancangan Sistem
Perancangan sistem untuk mengukur pengereman pada motor listrik
ini mempunyai bagan sebagai berikut :
Gambar 3. 1 Sistem Model Pengereman Motor DC
Kegunaan sistem pengereman motor listrik ini bertujuan untuk
mengendalikan pengereman motor saat berjalan dan menghadapi halangan.
Mekanisme sistem ini dengan cara motor DC aktif untuk menjalankan
kendaraan. Kemudian terdapat hambatan yang menghalangi. Sensor PING
mendeteksi hambatan tersebut dengan cara mengirimkan gelombang yang
dipancarakan kemudian diterima kembali pada sensor tersebut. Setelah itu
sensor mengirim data kepada minimum sistem. Minimum sistem menerima
data kemudian mengoperasikan program yang diperintahkan yang dimana
program itu untuk mengaktifkan sistem pada modul relay. Modul relay
pembebanan pada modul relay sehingga terjadi pengereman bertahap
dengan pembebanan.
1. Hambatan
Hambatan ini merupakan sarana untuk mengaktifkan sensor.
Dengan hambatan ini sensor bisa membaca apa yang berada di
depannya. Hambatan ini bisa berupa tembok, papan, atau yang lainnya
yang bersifat padat.
2. Sensor ping
Sensor ini merupakan piranti penting untuk mengirim dan
menerima data yang di proses mikrokontroller. dari komponen ini
semua sistem aktif dengan pengendalinya.
3. Mikrokontroller ATmega8535
Minimum sistem ini merupakan otak dari rancangan komponen
pengereman motor listrik. Dalam minimum sistem, mikrokontroller
atmega8538 dipasang dan diprogram sesuai dengan kebutuhan.
4. Motor DC
Komponen ini merupakan pengendali atau penggerak kendaraan
motor listrik. Kecepatan motor ini dipengaruhi oleh arus yang masuk
dari motor. Arus yang masuk dari motor dipengaruhi oleh modul relay
yang telah dikendalikan oleh minimum sistem.
5. Power Supply
Alat ini berfungsi untuk menyupai aliran listrik ke beberapa
sistem dalam table tersebut. Sistem itu diantaranya adalah sensor ping,
6. Modul relay
Rangkaian ini berfungsi untuk mengendalikan sistem pada
pengereman. Modul relay ini dikendalikan oleh mikrokontroller
ATmega8535. Dari data yang diberikan sensor masuk ke mikro lalu
mengendalikan rangkaian ini sesuai kebutuhan.
3.2. Perancangan Modul Relay
Perancangan modul ini mempunyai lima variasi sebagai pemicunya
dimana tiap variasi ini mempunyai hambatan yang berbeda – beda.
Rancangan modul relay ini mempunyai lima variasi dimana variasi ini
dikendalikan oleh mikrokontroller.
Pada gambar 3.2, input 1 terdapat vcc dan input motor. Input vcc
masukkan dari sumber daya untuk mengaktifkan relay tersebut, kemudian
input motor adalah masukkan dari arus motor yang telah diputus dengan
saklar kemudian motor DC menjadi generator DC dan masuk ke
pembebanan yang sudah diaktifkan oleh mikrokontroller. disini terjadilah
pengereman dengan pembebanan dengan resistor. Pada input 2 terdapat
ground dan input mikro. Input mikro mengendalikan aktif tidaknya relay
tersebut. Untuk rangkaian ini menggunakan transistor 2n2222 untuk
penyearah dan diode 1n41. Resistor dengan nilai minimal untuk
mengamankan led menggunakan 330ohm.
3.3 Rangkaian Relay Sebagai Saklar
Pada gambar 3.3 rangkaian relay sebagai saklar bertujuan untuk
memutus aliran listrik pada motor lalu dihubungkan oleh rangkaian
pembebanan yang suah dijelaskan pada gambar sebelumnya. Rangkaian ini
menghubungkan sumber arus (puwer supply) kemudian memutus dengan
pengendali mikrokontroller sebagai pemicunya.
Pada tiap port mempunyai kegunaan masing – masing, diantarannya:
1. Port 1 = penghubung ke sistem relay pembebanan
2. Port 2 = masukkan sumber daya
3. Input1-1= GND
4. Input1-2= masukkan mikrokontroller
5. Motor1= positive(+) motor
6. Motor2= negative(-) motor
7. Input2-1 = VCC
8. Input2-2 = GND
Gambar 3. 5 Rangkain Keseluruhan Sistem(lanjutan)
3.4. Rangkaian Mikrokontroller ATmega8535
Mikrokontroller merupakan otak dari semua sistem, dari sini semua
Gambar 3. 5 Rangkaian Mikrokontroler [8]
Kaki – kaki yang digunakan dalam mikrokontroller adalah :
1. Port B0 dan B1 digunakan untuk pengirim dan penerima sinyal
ultrasonik
2. Port A0 sampai A4 digunakan untuk mengaktifkan sistem relay
3. Port C6 dan C7 untuk mengaktifkan pembalik putaran
4. Port D3 untuk pemutus arus
3.5. Flowchart Sistem Pengendali Rem
Untuk mengaktifkan sistem pada rangkaian relay tersebut, dibutuhkan
program untuk mengendalikan semua sistem yang dikendalikan oleh
mikrokontroller. Aktif tidaknya sistem tergantung pada pemrograman pada
Pada Gambar 3.6 dapat dijelaskan tahap – tahap untuk menjalankan
sistem tersebut agar berjalan dengan semestinya. Pertama sistem pada
mikrokontroller diaktifkan. Kemudian cek posisi relay. Pada bagian ini
semua relay dalam keadaan tidak aktif semua. Setelah itu masuk ke dalam
deteksi jarak. Jika jarak 120cm maka relay 1-5 aktif, jika tidak maka akan
dilanjutkan ke deteksi jarak selanjutnya dengan jarak 100cm relay 1-4 aktif,
dan seterusnya. Jarak minimal pada pengecekan minimal 40cm. jika kurang
dari 40cm maka akan terjadi pembalik putaran agar motor berhenti. Setelah
itu kembali pada cek posisi relay untuk mendeteksi apakah kendaraan sudah
berhenti apa belum. Jika sudah berhenti maka program selesai.
3.6. Tahap – Tahap Perhitungan Sistem
Setelah merancang rancangan sistem pada pemodelan mobil motor
DC. Perhitungan selanjutnya meliputi perhitungan motor DC sebagai
generator, berbagai macam resistor (Ω) dihubungkan dengan perlambatan,
membalikkan kutub dari motor disertai mekanisme waktu z= 0.5s supaya
motor membalik arah, dan kemudian menganalisis hubungan antara energy
mekanik dan elektrik pada proses pengereman.
Mencari percepatan dengan massa dengan rumus
(3.1)
Diubah menjadi
(3.2)
Menentukan nilai perlambatan karena massa model
Karena = 0 dan dapat diukur maka am dapat ditemukkan
= waktu dengan massa
am = percepatan dengan massa
3.6.1. Menentukan Nilai Resistor
1. menggunakan kecepatan maksimal model Vmaks yang telah diketahui
untuk menyelesaikan rumus kecepatan berikut :
(3.4)
(3.5)
Maka
(3.6)
Nilai negatif menunjukkan a yang didapat adalah perlambatan
2. menggunakan rumus jarak pengereman :
(3.7)
Dari rumus diatas didapatkan rumus :
(3.8)
Karena ditentukan dan Vmaks diketahui maka t diketahui :
3. Menentukan nilai resistor bersasarkan jarak yang ditemukan
Nilai
aR = perlambatan yang disebabkan oleh pemasangan resistor
kemudian menggunakan rumus torsi yang ekivalen dengan energi
(3.10)
N adalah jumlah putaran per detik. Selama waktu t pengereman
model menempuh jarak s, sehingga roda melakukan n kali putran.
Keadaan ini dapat dirumuskan sebagai berikut
(3.11)
(3.12)
Dengan nilai generator = 2.12v. dapat dicari
3.6.2.Motor DC Sebagai Generator
Setelah motor DC diberi arus, kemudian terjadi energy elektrik
menjadi mekanis, kemudian energy mekanik tersebut di analisis berapa
arus mekanik yang keluar pada motor tersebut. Cara menganalisis energy
mekanik pada motor tersebut dengan cara menghubungkan dua motor
dengan ujung – ujung putarannya saling dihubungkan, salah satu motor
dialiri listrik untuk mengaktifkan motor 1. Kemudian motor 2 aktif dengan
tenaga mekanik motor 1 kemudian energy mekanik didapat.
3.6.3.Desain Mobil
Desain mobil terbuat dari bahan aklirik untuk bodi bada gambar 3.8. Ban
mobil menggunakan karet yang mempunyai tebal sebesar 0,9cm. panjang pada
mobil sebesar 14,5cm dan lebar sebesar 8,7cm dengan tinggi 7,8cm. pada depan
mobil diberi sensor PING untuk mendeteksi jarak dengan sensor ultrasonic. Motor
terletak pada bagian belakang mobil.
BAB IV
HASIL DAN PEMBAHASAN
Dari perancangan sistem yang telah dibuat perlu dilakukan sebuah
pengujian. Pengujian digunakan untuk mengetahui kinerja alat tersebut dalam
mendeteksi jarak agar terjadi pengereman. Hasil dari pengujian tersebut
menghasilkan suatu data – data. Dari data tersebut dapat dilihat bahwa kinerja
isitem berjalan dengan baik atau tidak. Pada bab ini akan dilakukan analisa dan
pembahasan pada data hasil pengujian yang telah diperoleh.
4.1
Perangkat Sistem Pengereman Motor ListrikRangkaian pengereman motor listrik terdiri antara modul relay,
rangkaian pemutus arus, dan rangkaian pemutus arus. Berat setiap tangkaian
ditimbang menggunakan timbangan merek ACIS. Berat pada modul relay
seberat 102,9 gram dengan ukuran 12,8x7,9cm seperti pada gambar 4.1.
modul relay ini berfungsi untuk mengendalikan sisa arus yang keluar untuk
pengereman.
Gambar 4.1 Modul Relay
Arus sumber daya sebesar 12v diputus lalu masuk ke dalam modul
relay. Rangkaian pemutus tersebut menggunakan rangkaian relay. Berat
pada gambar 4.2. Arus pada sumber daya sebesar 12v yang masuk pada
motor diputus dan sisa arus masuk kedalam modul relay.
Gambar 4.2 rangkaian pemutus arus
Rangkaian pemutus arus dan modul relay dikendalikan oleh
minimum sistem. minimum sistem menggunakan model mikroAVR ver. 2
merk creative vision 2010. Input jarak yang dideteksi oleh sensor ping
kemudian mengaktifkan sistem. Berat pada minimum sistem sebesar 48,4
gram dengan ukuran 7,6x5,3cm seperti pada gambar 4.3.
Gambar 4.3 mikroAVR
Setelah motor aktif kemudian diputus. Arus masuk ke dalam rangkaian
pembalik. Didalam rangkaian pembalik terjadi proses pengereman. Sebelum
masuk ke dalam motor. Arus diproses dalam modul relay. Berat pada
rangkaian pembalik sebesar 31,5 gram dengan ukuran 8x5,9cm seperti pada
gambar 4.4 rangkaian pembalik arus
4.1.1 Perangkat Pendukung
Perangkat pendukung pada analisis ini yaitu kabel sebagai penghubung
arus. Jika menggunakan sumber daya sendiri seperti baterai terkadang
mengalami drop saat analisis dan menghasilkan data yang tidak diinginkan
dan menghambat kinerja sensor ping karena daya kuranng. Panjang kabel
4m dihubungkan pada supplay untuk menjalankan prototype.
Gambar 4.5 kabel penghubung
Perangkat pendukung selanjutnya adalah sensor ping. Alat ini
merupakan alat utama untuk mendeteksi kapan prototype harus berhenti
jika mengenai suatu benda didepannya. Sensor ini memiliki 4 pin yang
Gambar 4.6 sensor ping
Sensor ini mendeteksi pada jarak minimal 2cm – 3m dengan input
trigger 2us – 5us dan echo pulse 115us – 18,5ms
4.2 Data Pengujian dan Pembahasan
Data pengujian dan pembahasan meliputi pengecekan sistem relay,
kecepatan motor, perhitungan resistor, dan data pengereman motor.
4.2.1 Pengecekan Sistem Relay
Pengecekan sistem relay meliputi pengecekan modul relay, pembalik
putaran, dan pemutus arus. Pengecekan tersebut menggunakan program
pada gambar 4.5.
Gambar 4.7 program pengecekan sistem relay
4.2.1.1 Pengecekan Modul Relay
Pengecekan modul relay ini berfungsi untuk mengetahui sistem
modul relay aktif atau tidak. sistem relay ini dikendalikan oleh
menggunakan transistor. Jika tegangan pada transistor kurang dari 5v maka
relay tidak aktif,. Jika 5v maka relay aktif. Relay digunakan untuk
mengaktifkan resistor sebagai penghambat. Mengaktifkan sistem relay
menggunakan program pada gambar 4.5.
Relay 1 aktif kemudian terhubung ke resistor 0,47Ω
Relay 2 aktif kemudian terhubung ke resistor 0,39Ω
Relay 3 aktif kemudian terhubung ke resistor 0,15Ω
Relay 4 aktif kemudian terhubung ke resistor 0,12Ω
Relay 5 aktif kemudian terhubung ke resistor 0 Ω
Sistem relay aktif dapat diliat pada tabel 4.1
tabel 4.1 modul relay
Relay 1 Relay 2 Relay 3 Relay 4 Relay 5
aktif Aktif Aktif Aktif aktif
4.2.1.2 Pengecekan Pembalik Putaran
Pengecekan pembalik putaran ini berfungsi untuk mengetahui relay 1
pada pembalik aktif kemudian terhubung ke relay 2 pembalik kemudian
membalik tegangan pada sistem. sistem pembalik ini dikendalikan oleh
mikrokontroller dengan tengangan 12v. Jika tegangan pada 5v maka relay 1
dan relay 2 aktif dan membalikkan putaran motor. Relay aktif dapat dilihat
pada tabel 4.2.
tabel 4.2 pembalik putaran
Relay 1 Relay 2
4.2.1.3 Pengecekan Pemutus Arus
Pengecekan pemutus arus ini berfungsi untuk mengetahui relay 1
aktif atau tidak. Fungsi dari sistem ini untuk memutuskan arus yang
terhubung pada supplai yang terhubung pada motor.
tabel 4.3 pemutus arus
Relay 1
Aktif
4.2.1.4 Pengecekan Motor
Pengecekan motor menggunakan supplay 12v dengan berat sebesar
123.6 gram. Pengecekan menggunakan stopwatch. Pengujian jalannya
motor jarak maksimal 2m dengan waktu 3,06s. Nilai waktu didapatkan
menggunakan stopwatch. Untuk mendapatkan data waktu motor berhenti,
menggunakan sistem relay pemutus arus. Setelah jarak 2m sistem relay
aktif dan memutuskan sumber tegangan. Waktu yang didapat melebihi
3,06s adalah waktu pada keadaan mobil melaju tampa sumber tegangan dan
menggunakan berat massa.
Pengecekan motor menggunakan program pada gambar 4.8 dan
menggunakan stopwatch menghasilkan waktu 3.06s pada jarak 2m.
pengecekan dilakukan sebanyak 10 kali. Hasil pengecekan motor dapat
dilihat pada tabel 4.4.
tabel 4.4 waktu motor berhenti motor dari titik awal sampai
prototipe diam
Data tabel 4.4 adalah data waktu motor berhenti yang dihasilkan dari
pemutus arus pada jarak 2m dan 3.06s. Setelah jarak 2m, relay aktif dan
memutus arus. Kemudian prototype masih bergerak dengan waktu 0.81s
dengan jarak 0,75m. Nilai 0,81s didapat dari nilai waktu berhenti prototipe
3,873 dikurangi nilai waktu berhenti motor 3,06s.
4.3
Perhitungan nilai resistorSetelah semua nilai didapat, perhitungan nilai resistor dapat dicari
dengan cara
Karena nilai generator terlalu kecil maka menggunakan analisis
pada nilai resistor. Nilai resistor pada perhitungan digunakan untuk
memberhentikan prototype. Maka, agar prototype mengerem dengan
perlahan maka digunakan resistor tambahan yang lebih besar. Nilai resistor
menggunakan hasil percobaan dengan cara menganalisis satu per satu
dengan jumper dan nilai resistor sebesar 0.12Ω, 0.15 Ω, 0.39 Ω, dan 0,47 Ω.
percobaan dikakukan pada jarak 35cm. Dengan jarak ini dianalisis
pengereman pada prototype. Pada datasheet sensor ping dijelaskan bahwa
range 2cm – 3m dengan pulse 115us – 18,5ms. Cepat rambat gelombang
ultrasonik di udara 29,034us setiap 1cm. saat mengukur jarak 2cm, maka
dibutuhkan waktu 4x29us=116us. Selisih 1us berdasarkan datasheet echo
return pulse minimal 115us. Jika 3m maka 600x29us=17,4ms. Saat tidak
ada pantulan pada pulsa echo yang ditangkap dalam jangka waktu 18,5ms,
maka pulsa echo akan otomatis falling down. Pada percobaan, saat jarak
35cm dikalikan 4 sehingga 4x35=140us.
Gambar 4.9 program pendeteksi sensor ping
Sistem kerja sensor ping yaitu saat gelombang dipantulkan
kemudian mengenai suatu benda maka pantulan akan ditangkap sensor.
Table 4.5 data jarak berhenti mobil
No 0,47Ω 0,39Ω 0,15Ω 0,12Ω 0Ω
1 43cm 35cm 43cm 38cm 36cm
2 49cm 35cm 48cm 57cm 37cm
3 43cm 43cm 43cm 38cm 38cm
4 38cm 44cm 54cm 37cm 36cm
5 37cm 46cm 42cm 49cm 30cm
6 30cm 37cm 44cm 40cm 26cm
7 41cm 49cm 47cm 49cm 42cm
8 37cm 42cm 46cm 44cm 40cm
Table 4.5 data jarak berhenti mobil(lanjutan)
10 42cm 41cm 52cm 43cm 35cm
Rata - rata 39,8cm 41cm 46,8cm 43,6cm 36,2cm
Dari hasil percobaan pada tabel 4.5 maka dapat diketahui bahwa
persentasi kesalahan dari pengukuran jarak menggunakan sensor ultrasonik
adalah
tabel 4.6 data presentasi kesalahan
Resistor(Ω) Jarak yang
setelah ditetapkan nilai resistor, maka dapat dicari nilai perubahan
waktu yang diperlukan pada saat resistor aktif sampai prototype berhenti
R= 0Ω
= 0s
R=0,12Ω
=0,0357s
R=0,15Ω
=0,0446s
R=0,39Ω
=0.11s
R=0,47Ω
=0,13s
Semakin besar nilai resistor maka arus yang mengalir semakin
kecil dan mengakibatkan lambatnya motor. Semakin besar nilai GGL
motor semakin cepat berhenti mobil. Semakin besar berat massa, maka
Setelah nilai perhitungan didapat, kemudian mencari nilai pada
hasil percobaan yang ada pada tabel 4.6
Table 4.7 nilai waktu terhadap resistor
No 0Ω 0.12 Ω 0.15 Ω 0.39 Ω 0.47 Ω
Dari hasil percobaan pada tabel 4.5. prototype berhasil berhenti
dan tidak menabrak suatu benda yang berada didepannya. Namun hasilnya
tidak berhenti pada jarak yang ditentukkan. Hal ini diakibatkan pengaruh
kabel yang kurang memenuhi standar untuk menyuplai motor dan keadaan
lintasan yang kurang rata sehingga mengakibatkan data yang valid
Persentasi kesalahan dapat dilihat pada tabel 4.6 dengan persentasi
eror paling besar berada pada resistor 0,15Ω dengan error jarak 11,8cm
dari yang diinginkan 35cm.
Analisis percobaan nilai waktu terhadap resistor pada tabel 4.7
mengalami kesulitan dikarenakan perubahan waktu yang sangat cepat dan
mengamati secara manual menggunakan stopwatch dalam pengambilan
Table 4.8 perbandingan waktu
Dari hasil perbandingan waktu antara perhitungan dengan hasil
percobaan pada tabel 4.8. Rresistor dengan nilai 0Ω sampai 0,15Ω nilai
perhitungan sangat kecil dan pada percobaan menggunakan stopwatch
tidak bisa didapan nilai terdekat karena terlalu cepat.
Analisis pengecekan relay dapat dianalisis dengan menggunakan
sensor ping dengan jarak – jarak yang ditentukan dengan mendekatkan dan
menjauhkan objek yang tak dapat ditembus sensor ping seperti karton atau
semacamnya. Dapat diketahui bekerja tidaknya sistem relay dapat dilihat
dengan bunyinya sistem relay. Namun jika sudah terhubung dengan mobil,
sistem relay tidak terlihat karena perubahan kecepatan yang cepat. Untuk
BAB V
KESIMPULAN DAN SARAN
5.1Kesimpulan
Dari percobaan dan perhitungan model pengereman mobil listrik
berbasi mikrokontroller ATmega8353 disimpulkan sebagai berikut:
1. Pada bagian pengereman, sistem pada prototipe sudah bekerja
dengan baik pada percobaan jarak ke 35cm. Sistem pada relay
dengan resistor sebesar 0,47 Ω,0,39 Ω,0,15Ω,0,12 Ω, dan 0Ω jika prototipe belum berhenti, aktif semua.
2. Sebelum mendekati jarak 20cm mobil sudah berhenti.
3. Dari hasil percobaan dengan jarak 35cm berhenti. Hasil analisis
setiap resistor berbeda beda dan tidak stabil. Pada resistor 0,47Ω
jarak yang didapat sebesar 39,8cm. Pada resistor 0,39Ω jarak yang
didapat sebesar 41cm. Pada resistor 0,15Ω jarak yang didapat
sebesar 46,8cm. Pada resistor 0,12Ω jarak yang didapat sebesar
43,6cm. Pada resistor 0Ω atau menggunakan jumper sebagai
penghubung jarak yang didapat 36,2cm. Persentasi nilai error
tertinggi pada resistor 0,15Ω sebesar 11,8cm.
4. Pengambilan data tidak stabil dikarenakan berbagai macam factor,
diantaranya:
Motor pada prototipe kecil sekitar 12v.
Kabel penghubung kurang besar sehingga kurang maksimal
dalam mengalirkan arus listrik.
Keadaan lintasan yang tidak rata menghambat kecepatan motor sehingga motor terlalu cepat mengerem.
Massa prototipe mempengaruhi kecepatan maksimal motor.
Arus pada generator terlalu kecil 1,9v sehingga pengereman
5. Pengambilan data waktu secara manual menggunakan stopwatch
menghasilkan data yang kurang sempurna dikarenakan aktifnya
relay sangat cepat sekitar 0,16s.
5.2Saran
Saran bagi pengembangan selanjutnya adalah:
1. Menggunakan motor yang sangast besar agar bisa menggunakan
supplai yang bernilai besar, sehingga menghasilkan nilai generator
yang besar
2. Jika menggunakan kabel, gunakan kabel yang besar agar arus yang
#include <mega8535.h>
#include <delay.h>
#define PULSE PORTB.1
#define ECHO PINB.0
#define OUT 1
#define INP 0
int jaraksensor;
unsigned int ultrasonic()
{
unsigned int count=0;
unsigned int jarak;
DDRB.1=1;//PIN PULSE MENJADI OUTPUT
PULSE=1;//memberikan tanda ke PING untuk memancarkan ultrasonic burst
delay_us(5);//waktu tunggu sebelum pengukuran min. 2us biasanya 5us
PULSE=0;//menberikan sinyal low ke PING
DDRB.0=0;//PIN PULSE MENJADI INPUT
PORTB.0=1;//mengatur PIN I/O sebagai pill-up
while (ECHO==0) {};//menunggu sinyal ECHO high
{
count++; //menghitung lebar sinyal ECHO high
}
jarak=(unsigned int)(((float)count)/25);//nilai pembagi dikalibrasi sampai sesuai dengan satuan yang diinginkan
return(jarak);//mengembalikan jarak ke fungsi ultrasonic dengan tipe data unsigned int
if(jaraksensor<=80)
{
PORTA.3=0;
}
if(jaraksensor<=60)
{
PORTA.4=0;
}
if(jaraksensor<=40)
{
PORTD.3=0;
}
}