Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN
POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL
PROGRAMING
SKRIPSI
Diajukan untuk memenuhi sebagian dari syarat memperoleh gelar Sarjana Sains Program Studi Fisika Departemen Pendidikan Fisika
Oleh
Fajar Arif Permata NIM 1008989
PROGRAM STUDI FISIKA DEPARTEMEN PENDIDIKAN FISIKA
FAKULTAS PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS PENDIDIKAN INDONESIA
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
RANCANG BANGUN MESIN BOR PCB
DENGAN PENGATURAN POSISI 3D BERBASIS
MIKROKONTROLER DAN VISUAL
PROGRAMING
Oleh
Fajar Arif Permata
Sebuah skripsi yang diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana SainsDepartemen Pendidikan Fisika FPMIPA UPI
© Fajar Arif Permata Universitas Pendidikan Indonesia
Mei 2015
Hak Cipta dilindungi undang-undang.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
iii
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL
PROGRAMING
Nama : Fajar Arif Permata
NIM : 1008989
Program Studi : Fisika
Pembimbing : 1. Ahmad Aminudin, M.Si.
2. Waslaluddin, M.T.
ABSTRAK
Mesin bor PCB dengan pengaturan posisi berbasis mikrokontroler dan visual programming berhasil dibangun. Mesin ini dibangun untuk menghilangkan beberapa kekurangan yang dimiliki pada pengeboran PCB secara manual dan mengatasi mahalnya pengeboran PCB secara otomatis yang ada diindustri ketika akan digunakan dalam skala laboratorium dan tujuan pembelajaran. Mesin bor dibangun menggunakan linear guide berupa drawer runners, penggerak translasi sumbu-x dan sumbu-y menggunakan tali baja dan screw ½ inchi sepanjang 4 cm, penggerak translasi sumbu z menggunakan screw½ inchi dan nut. Bagian penggerak digerakan oleh tiga buah motor stepper Nema 23 dengan resolusi 1,8o/step. Pada pengujian pemberian koordinat secara manual mesin bor PCB ini memiliki kesalahan sebesar 0,18 mm pada sumbu-x, dan 0,20 mm pada sumbu-y. Pada pengeboran secara otomatis percobaan pada PCB A dengan jarak tetap 5 mm mesin bor ini memiliki kesalahan sebesar 0,13 mm pada sumbu-x dan 0,3 mm pada sumbu-y, pada PCB B memiliki kesalahan sebesar 0,3 mm pada sumbu-x dan 0,2 mm pada sumbu-y, dan pada PCB C memiliki kesalahan sebesar 0,12 mm pada sumbu-x dan 0,1 mm pada sumbu-y. Rata rata kesalahan yang dimiliki mesin bor PCB ini adalah 0,18 mm pada sumbu-x dan 0,2 mm pada sumbu-y. Kecepatan pergerakan mata bor pada sumbu-x dan sumbu-y adalah 1cm/detik dan pada sumbu-z adalah 0,12 cm / detik.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
iv ABSTRACT
PCB drilling machine with position controlled based on microcontroler and visual programming have been built. This machine built for reduce several weakness on drilling with manual methode and give a solution for expensive automatic drilling machine on industry while want to use it for laboratory and educational purpose. This machinehave been built with using drawer runnersas linear guide, screw and nut on z axes andwork table on x and y axesmoving by wire rope threded pulley with ½ inches screw and 4 cm in length. Machine move by three NEMA 23 motor steppers with resolution 1,8o/step. For manual testing, machine have an error on x axes 0.18 mm and in y axes 0.20 mm. For automatic drilling on PCB A fix distance 5 mm machine have an error 0.13 mm on x axes and 0.3 mm on y axes. On PCB B with periodic distance 5 mm, 15 mm and 20 mm an average error is 0.3 mm on x axes and 0.2 mm on y axes. On PCB C have an average error 0.12 mm on x axes and 0.1 mm on y axes. An average error which machine have is 0.18 mm on x axes and 0.2 mm on y axes. The drill move speed on x and y axes are 1 cm / second and on z axes is 0.12 cm / second.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
v DAFTAR ISI
Pernyataan keaslian skripsi bebas plagiarisme ... Error! Bookmark not defined.
Ucapan terima kasih ... Error! Bookmark not defined.
ABSTRAK ... Error! Bookmark not defined.
DAFTAR ISI ... v
Daftar Tabel ... vii
Daftar Gambar ... viii
Daftar Lampiran ... x
BAB I PENDAHULUAN ... Error! Bookmark not defined.
1.1. Latar Belakang Penelitian ... Error! Bookmark not defined.
1.2. Rumusan masalah penelitian ... Error! Bookmark not defined.
1.3. Tujuan penelitian ... Error! Bookmark not defined.
1.4. Manfaat penelitian ... Error! Bookmark not defined.
1.5. Struktur organisasi skripsi ... Error! Bookmark not defined.
BAB II RANCANG BANGUN MESIN BOR PCB, MIKROKONTROLER DAN VISUAL PROGRAMING ... Error! Bookmark not defined.
2.1. Mesin Bor PCB ... Error! Bookmark not defined.
2.1.1. Pengertian PCB ... Error! Bookmark not defined.
2.1.2. Metode pembuatan mesin bor ... Error! Bookmark not defined.
2.1.2.1. Sistem Elektronik ... Error! Bookmark not defined.
2.1.2.2. Sistem mekanik ... Error! Bookmark not defined.
2.2. Visual programming ... Error! Bookmark not defined.
2.3. Motor Stepper ... Error! Bookmark not defined.
2.3.1. Konstruksi Motor Stepper ... Error! Bookmark not defined.
2.3.2. Pengendalian Motor Stepper ... Error! Bookmark not defined.
2.4. Modul Antar Muka ... Error! Bookmark not defined.
2.4.1. Mikrokontroler ... Error! Bookmark not defined.
2.4.2. Penguat Sinyal ... Error! Bookmark not defined.
BAB III METODOLOGI PENELITIAN ... Error! Bookmark not defined.
3.1. Desain Penelitian ... Error! Bookmark not defined.
3.2. Waktu dan Tempat Penelitian ... Error! Bookmark not defined.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
vi
3.3. 1. Perancangan Mekanik ... Error! Bookmark not defined.
3.3. 2. Pembuatan Sistem Mekanik ... Error! Bookmark not defined.
3.3. 2.1. Bahan ... Error! Bookmark not defined.
3.3. 2.2. Perakitan ... Error! Bookmark not defined.
3.3. 3. Program ... Error! Bookmark not defined.
3.3.3.1. Program komputer ... Error! Bookmark not defined.
3.3.1.1.1. Pembuatan excellon file ... Error! Bookmark not defined.
3.3.1.1.2. Pembuatan Panel Kendali ... Error! Bookmark not defined.
3.3.3.2. Program Mikrokontroler ... Error! Bookmark not defined.
3.4. Prosedur Penelitian ... Error! Bookmark not defined.
3.5. Analisis Data ... Error! Bookmark not defined.
BAB IV TEMUAN DAN PEMBAHASAN ... Error! Bookmark not defined.
4.1. Pengujian Pengambilan Data Excellon file ke Database ... Error! Bookmark not defined.
4.2. Pengujian Pengiriman Data PC ke Mikrokontroler Error! Bookmark not defined.
4.3. Pengujian Pergerakan Motor Stepper. ... Error! Bookmark not defined.
4.4. Pengukuran Bilangan Kalibrasi ... Error! Bookmark not defined.
4.5. Pengujian Pergerakan Sumbu X dan Sumbu Y ... Error! Bookmark not defined.
4.6. Pengujian Sistem Pengeboran Jarak Tetap ( PCB A) ... Error! Bookmark not defined.
4.7. Pengeboran Jarak Bertambah Secara Periodik (PCB B) ... Error! Bookmark not defined.
4.8. Pengeboran PCB Uji Coba ( PCB C) ... Error! Bookmark not defined.
4.9. Analisis Data ... Error! Bookmark not defined.
BAB V PENUTUP ... Error! Bookmark not defined.
5.1. Kesimpulan ... Error! Bookmark not defined.
5.2. Saran ... Error! Bookmark not defined.
DAFTAR PUSTAKA ... Error! Bookmark not defined.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
vii
DAFTAR TABEL
Tabel 2. 1. Pulsa Listrik Pada Pergerakan Full Step ... Error! Bookmark not defined.
Tabel 2. 2. Pulsa Listrik Pada Mode Pergerakan Half Step . Error! Bookmark not defined.
Tabel 2. 3. Pulsa Listrik Pada Mode Pergerakan Full Strength .. Error! Bookmark not defined.
Tabel 2.4. Fungsi khusus port B ... Error! Bookmark not defined.
Tabel 2.5. Fungsi khusus Port D ... Error! Bookmark not defined.
Tabel 4. 1. Tabel Pengukuran Jumlah Step Terhadap Perpindahan ... Error! Bookmark not defined.
Tabel 4. 2. Tabel Pengukuran Karakterisasi Sumbu X dan Sumbu Y ... Error! Bookmark not defined.
Tabel 4. 3. Pengukuran Hasil Pengeboran PCB A . Error! Bookmark not defined.
Tabel 4. 4. Tabel Pengukuran PCB B ... Error! Bookmark not defined.
Tabel 4. 5. Pengukuran Hasil Pengeboran PCB C . Error! Bookmark not defined.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
viii
DAFTAR GAMBAR
Gambar 2. 1. Diagram Sistem Mekanik ... Error! Bookmark not defined.
Gambar 2. 2. Sistem Penggerak Menggunakan Tali Baja ... Error! Bookmark not defined.
Gambar 2.3. Tampilan Pembuatan Form Pada Delphi XE 5 Error! Bookmark not defined.
Gambar 2.4. Variable reluctance motor (Himaone, 2003) ... Error! Bookmark not defined.
Gambar 2.5. Konstruksi motor stepper jenis permaent magnet (Himaone, 2003) ... Error! Bookmark not defined.
Gambar 2.6. Konstruksi motor stepper jenis hybrid (Himaone, 2003) ... Error! Bookmark not defined.
Gambar 2.7. Kumparan pada motor bipolar dan unipolar ... Error! Bookmark not defined.
Gambar 2.8. DI-PRO AVR ... Error! Bookmark not defined.
Gambar 2.9. Arsitektur ATmega 8535 (Datasheet ATMega 8535) ... Error! Bookmark not defined.
Gambar 2.10. Pin pada ATmega 8535 (Datasheet ATMega 8535) ... Error! Bookmark not defined.
Gambar 2. 11. Konfigurasi Pin L298N ... Error! Bookmark not defined.
Gambar 2. 12. Blok diagram IC L298N ... Error! Bookmark not defined.
Gambar 2. 13 Rangkaian Penguat Sinyal ... Error! Bookmark not defined.
Gambar 3. 1. Desain Mekanik Bor PCB Otomatis Error! Bookmark not defined.
Gambar 3. 2. Drawer Runner (Rel Laci)... Error! Bookmark not defined.
Gambar 3. 3. Motor Stepper ... Error! Bookmark not defined.
Gambar 3. 4. Screw 1/2 " dan flexible coupling untuk sumbu z . Error! Bookmark not defined.
Gambar 3. 5. Bearing 6 mm ... Error! Bookmark not defined.
Gambar 3. 6. Bahan yang selesai dirakit ... Error! Bookmark not defined.
Gambar 3. 7. Pembuatan excellon file ... Error! Bookmark not defined.
Gambar 3.8. Pengaturan Parameter Excellon File . Error! Bookmark not defined.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
ix
Gambar 3.10. Program Mode Otomatis Untuk Pengerjaan PCB Error! Bookmark not defined.
Gambar 3.11. Diagram alir merubah excellon file ke database .. Error! Bookmark not defined.
Gambar 3.12. File gagal diambil dan tidak dikenal (kiri), File berhasil masuk ke database (kanan) ... Error! Bookmark not defined.
Gambar 3.13. File yang berhasil di ambil dan disimpan di database ... Error! Bookmark not defined.
Gambar 3.14. Flowchart tombol kerjakan ... Error! Bookmark not defined.
Gambar 3.15. Diagram Interface ... Error! Bookmark not defined.
Gambar 3. 16. Rangkaian Interface Komputer ke Alat mekanik Error! Bookmark not defined.
Gambar 3.17. Diagram alir program pada mikrokontroler .. Error! Bookmark not defined.
Gambar 3.18. Diagram Alir Penelitian ... Error! Bookmark not defined.
Gambar 4. 1. File merupakan excellon file (kiri) , File bukan excellon file (kanan) ... Error! Bookmark not defined.
Gambar 4. 2. Data Koordinat Berhasil Dibaca dan Diplot .. Error! Bookmark not defined.
Gambar 4. 3. File Tidak Dikenal ... Error! Bookmark not defined.
Gambar 4. 4. Tampilan Program VSPE ... Error! Bookmark not defined.
Gambar 4. 5. Program Hercules SETUP Utility .... Error! Bookmark not defined.
Gambar 4. 6. Pengukuran Gerak Tiap 100, 200, 300 dan 400 Step Sumbu X (kiri) dan Sumbu Y (kanan)... Error! Bookmark not defined.
Gambar 4. 7. Desain PCB A Pada Proteus... Error! Bookmark not defined.
Gambar 4. 8. File PCB A Berhasil Dibaca... Error! Bookmark not defined.
Gambar 4. 9. Tampilan Program Ketika Beroperasi ... Error! Bookmark not defined.
Gambar 4. 10. Proses Pengerjaan (kiri), Hasil Pengerjaan Pada PCB A tampak depan (kanan) ... Error! Bookmark not defined.
Gambar 4. 11. Perbandingan Program dan Hasil Pengeboran PCB A ... Error! Bookmark not defined.
Gambar 4. 12. Desain PCB B Pada Proteus ... Error! Bookmark not defined.
Gambar 4. 13. Tampilan Program Untuk PCB B... Error! Bookmark not defined.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
x
Gambar 4. 15. Hasil Pengerjaan PCB B ... Error! Bookmark not defined.
Gambar 4. 16. Perbandingan Program dan Hasil Pengeboran PCB B ... Error! Bookmark not defined.
Gambar 4. 17. Desain PCB C Pada Proteus ... Error! Bookmark not defined.
Gambar 4. 18.Tampilan Panel Kendali Untuk PCB C ... Error! Bookmark not defined.
Gambar 4. 19. Proses Pengerjaan PCB C ... Error! Bookmark not defined.
Gambar 4. 20. Hasil Pengerjaan PCB C Tampak Depan ... Error! Bookmark not defined.
Gambar 4. 21.Hasil Pengerjaan PCB C Tampak Belakang . Error! Bookmark not defined.
Gambar 4. 22. Perbandingan Data Koordinat dan Hasil Pengeboran ... Error! Bookmark not defined.
Gambar a. Hasil Pengeboran Karakterisasi Sumbu Y ... Error! Bookmark not defined.
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
xi
DAFTAR LAMPIRAN
Lampiran 1.Kode Program Mikrokontroler ... Error! Bookmark not defined.
1
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB I PENDAHULUAN
1.1.Latar Belakang Penelitian
Produk elektronika dibangun dengan menggunakan PCB dalam beberapa
dekade terakhir dan nampaknya hal ini tidak akan berubah dalam beberapa waktu
kedepan, karena menurut Brindley (2005) PCB memberikan mekanisme yang
aman secara fisik dalam menunjang komponen elektronik ketika dihubungkan
secara elektrik sesuai konfigurasi yang diinginkan. PCB digunakan dalam aplikasi
penerapan elektronika di zaman modern ini dimana dalam pembuatannya meliputi
perancangan, pembuatan jalur rangkaian, dan pengeboran drill pad. Pembuatan
dan pengeboran dilakukan oleh mesin sesuai dengan desain yang telah dirancang
menggunakan program Computer Aided Design (CAD), namun pembuatan PCB
dengan metode ini hanya menguntungkan jika dilakukan dalam skala produksi
yang besar sedangkan ketika ingin membuat prototipe rangkaian, penggunaan
dalam dunia pendidikan, dan rangkaian elektronik dalam skala yang lebih kecil
biasanya pembuatan PCB dilakukan menggunakan tangan.
Dalam dunia pendidikan khususnya di tingkat sekolah menengah
disebutkan dalam PERMEN Pendidikan dan Kebudayaan No. 70 tahun 2013
tentang Kerangka Dasar Dan Struktur Berdasarkan KurikulumSekolah Menengah
Kejuruan/Madrasah Aliyah Kejuruan, pada kompetensi 1.9 Kompetensi Dasar
Prakarya dan Kewirausahaan, poin KD 4.7 untuk kelas XII bahwa siswa harus
dapat :
4.7 Membuat karya rekayasa elektronika dengan kendali otomatis yang berkembang di wilayah setempat dan lainnya sesuai teknik dan prosedur
Hal ini membuat para siswa diharuskan membuat rangkaian elektronik yang
biasanya pengeborannya dilakukan secara manual, tentunya pengeboran secara
manual memiliki beberapa kekurangan dibanding pengeboran secara otomatis
seperti dikatakan Mahdavinejad (2009) bahwa pengeboran otomatis membuat
hasil pengeboran menjadi relatif lebih akurat, hemat waktu, dan proses
pengerjaan relatif lebih cepat, metoda pengeboran jenis ini memiliki tingkat
2
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Saat ini perusahaan pembuat PCB menggunakan mesin berbasis numerik
ataupun penggunaan mesin berbasis kamera dalam hal pengeboran material PCB
sebelum masuk ke proses pemasangan komponen.Untuk mesin berbasis numerik
teknik yang digunakan menggunakan bantuan program CAD (computer aided
design)dalam tahap perancangan sampai tahap pembuatan. Gambar rancangan
menyimpan informasi koordinat titik drill pad dan juga posisi jalur rangkaian.
Salah satu penelitian pembuatan bor PCB otomatis telah dilakukan oleh
Thiang (2002) dari Universitas Petra,Mesin yang digunakan bergerak dengan
adanya motor stepper dan screw nut yang dikontrol menggunakan PLC yang
memiliki kesalahan rata – rata sebesar sebesar 0,6 mm. Kecepatan gerak mata bor
0,033 cm / detik dan komunikasi dari komputer ke perangkat keras menggunakan
port paralel.
Pada penelitian dari Thiang kesalahan rata – rata yang dimiliki masih
terlalu besar dan gerakan mata bornya sangat lambat, selain itu pengunaan port
paralel sudah jarang digunakan pada komputer saat ini. Untuk mengatasi
kelemahan tersebut akan digunakan sistem mekanik dengan penggunaan tali baja
dan screw ½ inchi sebagai pengubah gerak rotasi menjadi translasi dan program
yang dibuat berbasis mikrokontroler dan menggunakan Delphi XE 5 untuk
membuat program interface. Delphi XE 5 memiliki komponenbernama “Tcomport” yang dapat digunakan untuk membuat perintah pengiriman data secara serial kepada mikrokontroler melalui Port Com (Taufik, 2011). Delphi juga
dapat mengendalikan perangkat melalui port USB dengan menggunakan program
tambahan yaitu program Prolific PL-2303 GPS driver dimana data yang dikirim
melalui port Com tertentu bisa dikeluarkan melalui port USB. Delphi juga
mempunyai fasilitas database (Ali, 2003) yang dapat digunakan untuk menyimpan data kordinat pad dari rancangan PCB berbentuk “Excellon File” yang telah dibuat di Proteus atau OrCad untuk selanjutnya diberikan satu persatu kepada
mikrokontroler.
Skripsi ini bertujuan untuk merancang dan membangun suatu mesin bor
PCB yang dapat bergerak secara otomatis sesuai posisi kordinat pad pada gambar
rancangan sehingga dapat menghilangkan masalah pada pengeboran pad secara
3
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
rancangan, kecepatan pergerakan yang lebih cepat, harga yang murah dan dapat
dikendalikan via port USB oleh PC.
1.2. Rumusan masalah penelitian
Rumusan masalah dalam penelitian ini adalah “Bagaimana merancang
dan membangun mesin bor pcb dengan pengaturan posisi 3d berbasis mikrokontroler dan visual programing” Rumusan Masalah ini dapat dijabarkan ke dalam beberapa pertanyaan penelitian sebagai berikut :
a. Bagaimana merancang alat mekanis yang dapat menggerakan mesin
bor dengan tingkat akurasi yang baik?
b. Bagaimana merancang program pada mikrokontroler ATMega 8535
sehingga dapat mengendalikan putaran motor stepper sesuai
koordinat pad yang diberikan?
c. Bagaimana merancang program pada visual programingsehingga dapat merubah “excellon file” dari rancangan PCB menjadi titik-titik koordinat untuk diberikan kepada mikrokontroler melalui port USB?
1.3.Tujuan penelitian
Penelitian ini bertujuan untuk mengetahui efektifitas dari perancangan dan
pembuatan mesin bor PCB otomatis dengan program dan perangkat keras yang
didesain oleh peneliti. Secara khusus penelitian ini bertujuan untuk:
a. Membangun mesin bor otomatis yang dapat bergerak sesuai posisi
yang diinginkan dengan tingkat akurasi yang baik.
b. Merancang program pada ATmega 8535 sehingga dapat
berkomunikasi dengan komputer dan mengendalikan putaran motor
stepper dengan tepat sesuai koordinat yang diberikan.
c. Merancang program yang dapat merubah “excellon file” pada
gambar rancangan PCB menjadi titik kordinat untuk diberikan
4
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
1.4. Manfaat penelitian
Manfaat yang bisa didapatkan dengan adanya penelitian ini antara lain :
a. Mendapatkan mesin bor PCB yang memiliki tingkat akurasi yang
baik sesuai dengan gambar rancangan.
b. Mendapatkan mesin bor yang dikendalikan berbasis mikrokontroler
Atmega8535 dan dapat bergerak secara otomatis sesuai kordinat pad
pada gambar rancangan di komputer.
c. Mendapatkan program yang dapat merubah “excellon file” dari
gambar rancangan PCB menjadi titik kordinat untuk diberikan
kepada mikrokontroler melalui port USB.
1.5. Struktur organisasi skripsi
Struktur organisasi skripsi dalam penelitian ini di jelaskan sebagai berikut: Bab I meliputi latar belakang masalah penelitian,rumusan masalah dan identifikasi masalah berdasarkan hasil studi pendahuluan, tujuan penelitian dalam
pembuatan bor PCB otomatis.Kemudian dijelaskan pula manfaat penelitian bagi
beberapa pihak terkait dan penjelasan tentang struktur organisasi skripsi.
Bab II membahas tentang kajian pustaka yang berkaitan dengan proses pembuatan mesin bor PCB otomatis, dibahas juga penggunaan perangkat lunak
dan teori dari perangkat keras yang akan digunakan.
Bab III membahas tentang metode dan desain penelitian.Selanjutnya dipaparkan desain perangkat lunak, definisi operasional, diagram alir dari program
yang digunakan, desain perangkat keras yang akan dibuat, prosedur penelitian
yang dilakukan, serta penjelasan tentang teknik pengolahan data.
Bab IV menjelaskan tentang data penelitian dan dijelaskan pula pembahasan data meliputi keandalan perangkat dalam menyelesaikan suatu pekerjaan
pengeboran PCB.Kemudian dijelaskan juga temuan lainnya yang ditemukan
selama penelitian.
Bab V berisikan tentang kesimpulan dari hasil penelitian berdasarkan rumusan masalah dan rekomendasi bagi para pengguna hasil penelitian yang diperoleh
22
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB III
METODOLOGI PENELITIAN
3.1. Desain Penelitian
Metode yang digunakan pada penelitian ini adalah metode eksperimen,
dimana penulis merancang suatu sistem pengeboran PCB otomatis lalu
membangun sistemnya dan melakukan uji coba pada sistem yang sudah dibangun
guna mengetahui keandalan dari sistem yang telah dirancang dan menganalisis
hasilnya. Perancangan dan pembuatan sistem meliputi perancangan perangkat
lunak di komputer, rangkaian interfacing danprogram pada mikrokontroler yang
digunakan, serta desain mekanik yang dibangun.
3.2. Waktu dan Tempat Penelitian
Perancangan dan pembuatan alat dilakukan di workshop FPMIPA UPI
dan pengujian alat dilakukan di laboratorium instrumentasi gedung FPMIPA B
lantai 4, selama enam bulan terhitung dari 3 Nopember 2014 sampai dengan 22
Mei 2015
3.3. Metode Penelitian
Penelitian ini bertujuan untuk merancang dan membangun sistem
pengeboran PCB otomatis. Pembuatan mesin bor PCB ini meliputi, perancangan
alat mekanik, pembuatan alat mekanik, pembuatan program komputer, pembuatan
program mikrokontroler dan pengujian alat.
3.3. 1. Perancangan Mekanik
Sistem mekanik dirancang menggunakan program Google SketchUp Pro
8.0 dengan desain seperti pada Gambar 3.1. bahan utama untuk rangka alat ini
terbuat dari kayu yang disusun menggunakan sekrup dan beberapa penguat. Untuk
bagian sumbu x, sumbu y, dan sumbu z, menggunakan rel laci sebagai bantalan
untuk gerakan translasi, PCB akan diletakan di meja berukuran 15 cm x 32 cm
yang bergerak sebagai sumbu y. alat bor diletakan diatas papan yang dapat
23
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Ketiga sumbu digerakan oleh tiga motor stepper, sumbu x dan sumbu y
menggunakan sistem tali baja dalam proses pergerakannya, dan sumbu z
menggunakan teknik screw and nut.
Ukuran dimensi dari alat bor P x L x T adalah 31 cm x 32 cm x 30 cm,
memungkinkan alat untuk memiliki area kerja berukuran 13 cm x 20 cm, mampu
memiliki kedalaman pengeboran sebesar maksimal 4 cm.
3.3. 2. Pembuatan Sistem Mekanik
3.3. 2.1. Bahan
Pembuatan sistem mekanik dibuat dengan bahan – bahan sebagai berikut :
a. Rel laci untuk gerak translasi sumbu x, y dan z.
24
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Rel laci digunakan untuk menahan pergeseran meja dan mesin bor
pada setiap sumbu. Rel ini terdiri dari bola yang mampu menahan beban
vertikal dengan baik ketika benda kerja bergerak translasi pada posisi
horizontal.
b. Tiga buah motor stepper, untuk sumbu x, y dan z.
Gambar 3. 3. Motor Stepper
Motor stepper yang digunakan adalah motor stepper hybrid unipolar
dengan jenis NEMA-23 dengan tegangan kerja 12 V – 24 V, dan resolusi putaran
1,8o / step atau 200 step / 360o . Motor ini dapat bekerja dengan suplai tegangan dari power suply DC 12 V/1 Ampere.
c.Screw diameter ½ inchi dan juga flexible coupling untuk sumbu z.
Gambar 3. 4. Screw 1/2 " dan flexible coupling untuk sumbu z
Screw ½ inchi digunakan untuk merubah gerak rotasi motor stepper
disumbu z menjadi gerak translasi ke bawah dan keatas, screw ini memiliki lebar
pitch sebesar 1,02 mm, sehingga mata bor akan bergerak kebawah atau keatas
25
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
d.Bearing 6 mm.
Gambar 3. 5. Bearing 6 mm
Bearing yang digunakan mempunyai kode 626z mempunyai diameter
dalam sebesar 6 mm, digunakan untuk dudukan screw disumbu z. Bearing
digunakan untuk menahan sumbu yang berputar pada sumbu z.
3.3. 2.2. Perakitan
Gambar 3. 6. Bahan yang selesai dirakit Sumbu x
Sumbu z
Depan Belakang
Kanan Kiri
Bor naik
Bor turun
26
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Bahan – bahan kemudian dirakit sedemikan rupa menggunakan beberapa
plat siku dan baut sesuai Gambar rancangan. Meja kerja bergerak pada sumbu y,
dan alat bor menempel pada papan kayu yang dapat bergerak pada sumbu x dan
sumbu z sehingga dapat dilihat pada Gambar 3.6. model alat bor yang sudah
selesai dirakit. Mesin memiliki ukuran panjang 32 cm dan lebar 31 cm, dengan
area kerja PCB yang dapat dikerjakan adalah 10 cm x 15 cm.
3.3. 3. Program
Ada dua jenis program yang dibuat yaitu, program pada komputer dan
program pada mikrokontroler. Berikut akan dijelaskan program pada setiap
bagian.
3.3.3.1. Program komputer
Program komputer adalah program antarmuka antara operator dan mesin
dan memiliki kemampuan sebagai berikut :
1. Mampu membaca Excelon File yang dihasilkan oleh Proteus.
2. Mampu menyimpan data koordinat kedalam database.
3. Mampu menghitung langkah yang harus dilakukan dari satu titik ke
titik lain.
4. Mampu mengirimkan data secara serial melalui port USB ke
interface.
5. Mampu melakukan prosedur untuk melakukan kalibrasi penentuan
titik awal.
6. Memiliki fasilitas emergency stop, untuk menghentikan operasi
apabila terjadi hal diluar kendali seperti patahnya mata bor.
3.3.1.1.1. Pembuatan excellon file
Program komputer dirancang agar bisa menyimpan data koordinat berupa
excellon file dari proteus kedalam database di delphi XE5. Excellon File pada
27
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3. 7. Pembuatan excellon file
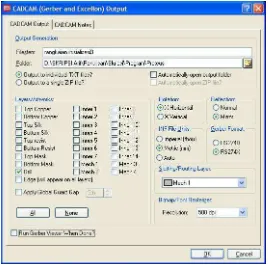
Setelah layout PCB dirancang menggunakan ARES pada Proteus lalu
selanjutnya klik Output Generate Gerber/ Excellon Files. Muncul kotak dialog
pada Gambar 3.8. lalu klik parameter layer hanya drill, INF File units menjadi
metric (mm), reflection klik pada “mirror” dan tentukan nama dan tempat file
akan disimpan. Lalu klik Ok.
Gambar 3.8. Pengaturan Parameter Excellon File
28
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu M48
nilai absis dan koordinat Y diikuti oleh 7 digit nilai ordinat.
3.3.1.1.2. Pembuatan Panel Kendali
Pembuatan program komputer Panel Kendali dilakukan menggunakan
Delphi XE 5, dengan parameter minimal yang telah diuraikan pada tahap
perancangan model dari program, maka tata letak komponen dan tombol dari
program yang dibuat adalah seperti terlihat pada Gambar 3.9. dan Gambar 3.10.
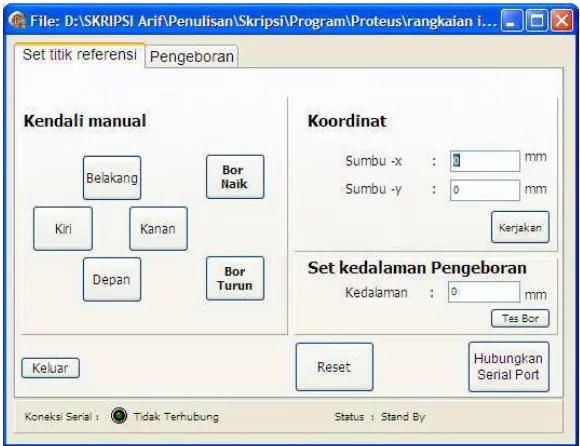
Pada Gambar 3.9. adalah program penentuan titik awal diberi nama “Set
titik referensi” bagian ini berfungsi untuk menentukan titik referensi awal (0,0)
dari PCB yang akan dilubangi. Berdasarkan Gambar 3.6. tombol “depan”
digunakan untuk menggerakan sumbu-y positif sejauh 0,8 mm dan tombol
“belakang” digunakan untuk menggerakan sumbu-y negatif sejauh 0,8 mm.
Tombol “kanan” untuk menggerakan sumbu-x negatif sejauh 0,8 mm dan tombol
29
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
dan “Bor Turun” digunakan untuk menaikan dan menurunkan posisi mata bor. Bagian panel dengan label “Koordinat” digunakan jika operator ingin menggeser
mata bor ke posisi yang diinginkan ketikan nilai kordinat sumbu-x dan sumbu-y
dan tekan tombol “Kerjakan” untuk mengeksekusi perintah.
Gambar 3.9. Program Penentuan Titik Awal dan Kedalaman Bor
Pada panel dengan label “Set kedalaman Pengeboran” digunakan untuk
menentukan kedalaman mata bor yang diinginkan oleh operator diisi dengan nilai
antara 1 mm - 15 mm tergantung posisi awal mata bor, data ini akan digunakan
terus oleh program selama proses pengerjaan berlangsung.
Tombol “Hubungkan Serial Port” digunakan untuk membuka saluran komunikasi serial di komputer sehingga bisa digunakan untuk mengirim data ke
mikrokontroler, tombol “Reset” digunakan untuk menghapus semua data dan
menutup saluran komunikasi serial. Tombol “keluar” ditekan ketika operator akan
menutup program.
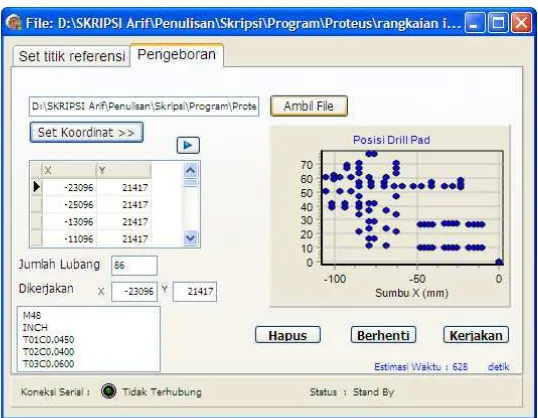
Pada Gambar 3.10. Form dengan judul Pengeboran digunakan untuk
pengerjaan lubang PCB dimana mempunyai fasilitas sebagai berikut : Tombol
“Ambil File” digunakan untuk mengambil Excellon File yang telah dibuat di Proteus yang berisi data posisi dari kordinat drill pad yang telah dirancang.
30
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Tabel DBGrid dalam bentuk koordinat X dan Y, lalu menampilkan letak posisi
drill pad nya di grafik dengan judul “Posisi Drill Pad” dan menghitung estimasi
waktu yang diperlukan untuk menyelesaikan seluruh lubang, jumlah lubang yang
akan dibor tertulis di sebelah kanan label “Jumlah Lubang”.
Gambar 3.10. Program Mode Otomatis Untuk Pengerjaan PCB
Tombol “Kerjakan” digunakan untuk memulai pengeboran dengan
menerjemahkan data pada Tabel DBGrid X dan Y menjadi jumlah langkah yang
harus dilakukan oleh motor stepper di setiap sumbu. Tombol “Berhenti”
digunakan untuk menghentikan operasi pengeboran, dan tombol “Hapus”
digunakan untuk menghapus semua parameter yang telah di load oleh operator.
Pada form juga terdapat progress bar untuk memonitor presentase lubang yang
telah diselesaikan. Titik koordinat berwarna biru akan menjadi merah ketika akan
dibor dan menjadi putih ketika sudah selesai dibor. Label “Koneksi Serial”
digunakan untuk melihat status port serial apakah sudah terbuka atau belum,
31
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Berdasarkan bentuk form pada Gambar 3.9. dan Gambar 3.10. dan
bentuk dari excellon file setelah dibentuk pada gambar subbab 3.3.1.1.1 maka
flowchart dari program untuk tombol “Set koordinat” dapat dilihat pada Gambar 3.11. Tombol “Set koordinat” berfungsi untuk mengambil data pada excellon file
dan disimpan pada database delphi.
:
Gambar 3.11. Diagram alir merubah excellon file ke database
Berdasarkan bentuk excellon file seperti pada subbab 3.3.1.1.1. Dapat
diketahui bahwa excellon file selalu diawali dengan kode “M48” dan diakhiri kode ya
ya
32
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
“M30”, lalu koordinat X berisi 7 digit informasi dan koordinat Y berisi 7 digit informasi. Sehingga bentuk kode programmnya bisa dibuat seperti dibawah ini :
q := 'M48';
jumlah_lubang.text:= inttostr(clientdataset1.RecordCount); u := clientdataset1.RecordCount;
wk_progress := 0;
Ketika file yang diambil baris pertamanya berisi karakter “M48” maka
program akan menyalin setiap data X dan data Y untuk dimasukan ke database
sampai menemukan kode “M30” (Gambar 3.12 kanan) dan ketika baris pertama
33
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3.12. File gagal diambil dan tidak dikenal (kiri), File berhasil masuk ke database (kanan)
Untuk mendapatkan gambaran posisi drill pad penulis menggunakan
fungsi chart dengan memasukan kode : ……
Chart1.Series[0].AddXY(xchart, ychart,‟‟,clteecolor);
……
Pada prosedur “Set Koordinat” sehingga didapat gambaran dari posisi lubang
yang akan dibor seperti pada Gambar 3.13 :
Gambar 3.13. File yang berhasil di ambil dan disimpan di database
Tombol “Kerjakan” ditekan setelah file disimpan dengan baik di dalam
database dan memiliki flowchart sebagai berikut, tombol ini berfungsi untuk
34
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3.14. Flowchart tombol kerjakan
Gambar 3.14. Menggambarkan alur dari program yang dilakukan oleh
tombol “Kerjakan” database mengirimkan data pertama untuk dihitung berapa
langkah yang harus dilakukan oleh motor stepper dengan persamaan :
xstep = (xtujuan-xsekarang) x bil_kalibrasix … Persamaan 3.1
ystep = (ytujuan-ysekarang) x bil_kalibrasiy … Persamaan 3.2
. Kode program untuk tombol kerjakan dapat dilihat pada kode dibawah ini : …
xtujuan := strtoint (sumbu_x.Text); ytujuan := strtoint (sumbu_y.Text);
chart1.Series[0].AddXY(xtujuan,ytujuan,‟‟,clred);
xlangkah := (xtujuan – xnow) * bil_kalibrasi ;
35
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
langkahx := round (xlangkah);
Baris berwarna merah adalah perintah untuk mengirimkan data ke
mikrokontroler, dan baris berwarna hijau digunakan agar posisi lubang yang akan,
sedang dan selesai dikerjakan memiliki warna berbeda.
Pengujian fungsi program dapat diketahui dengan bantuan program
Hercules Utility sebelum dihubungkan dengan perangkat. Program ini dapat
digunakan untuk melihat data keluaran dari port serial dan menampilkan pada
layar komputer.
3.3.3.2. Program Mikrokontroler
Rangkaian interface menggunakan satu buah mikrokontroler
Atmega8535L yang sudah dirangkai dengan ATtiny agar dapat melakukan
komunikasi serial melalui port USB, program pada ATtiny digabungkan dengan
program PL-2303 USB-Serial driver, membuat mikrokontroler dapat dikondisikan
kedalam suatu virtual port pada komputer, sehingga delphi dapat menggunakan
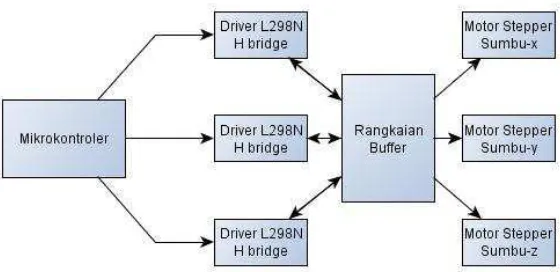
perintah Comport untuk mengirim data lewat port USB. Diagram interface yang
dirangkai adalah seperti pada Gambar3.15. Mikrokontroler menggunakan 3 port
dimana port A mengendalikan stepper sumbu-y, dan port B mengendalikan stepper
sumbu-x dan port C mengendalikan stepper sumbu-z. Stepper dan driver L298
dihubungkan ke rangkaian buffer sebelum masuk ke mikrokontroler agar
36
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Gambar 3.15. Diagram Interface
Berdasarkan diagram pada Gambar 3.15. bentuk dari rangkaian
interface adalah sebagai berikut :
Gambar 3. 16. Rangkaian Interface Komputer ke Alat mekanik
Gambar 3.16 adalah rangkaian PCB dari interface komputer ke alat
mekanik, dibangun menggunakan satu buah modul DI-Pro AVR System dengan
mikrokokontroler ATMega 8535L dan tiga buah driver motor stepper berupa IC
L298N, dan satu buah modul penghubung ke masing – masing motor
stepper.Tegangan 5 Volt untuk mikrokontroler diambil dari port USB di PC,
37
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
penghubung yang disuplai oleh adaptor DC 12 V/1 A modul ini dirangkai dengan
regulator 7805 sehingga modul dapat mengeluarkan tegangan 5 Volt.
Sesuai kriteria yang dijelaskan pada bagian A, Gambar 3.15 dan
Gambar 3.16. langkah selanjutnya adalah membuat program mikrokontroler.
Diagram alir dari program pada mikrokontroler adalah sebagai berikut :
Gambar 3.17. Diagram alir program pada mikrokontroler
Mikrokontroler menerjemahkan karakter yang dikirim melalui data
serial yang diberikan oleh program arifbot ver 1.0 dan melakukan pengecekan
apakah data diawali dengan huruf X, Y, atau Z untuk selanjutnya diprogram untuk
mencari karakter “-“ , jika ada karakter “-“ program akan menjalankan program
putar negatif untuk sumbu yang sesuai. Listing programnya pengecekannya
38
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
…
Void process_command() {
if(strcasestr(command_in,”X”) != NULL){
if(strcasestr(command_in,”-“) != NULL){
langkah = parse_assignment (command_in); putarx_neg (langkah);
//uart_ok (); }
else {
langkah = parse_assignment (command_in); putarx_pos (langkah);
…
Program akan melakukan pengecekan apakah data yang disalin pada
command_in mengandung karakter “X” atau “Y” atau “Z”, jika ada maka lakukan pengecekan apakah ada karakter “-“ jika ada maka program akan menjalankan procedure putarx_neg atau putary_neg atau putarz_neg, namun jika tidak ada
maka program akan menjalankan procedure putarx_pos, putarx_neg, putarz_pos.
Procedure dari program putarx_pos dapat dilihat seperti ini : …
int data_step[]={49,57,41,45,37,39,35,51};
…
void putarx_pos (int langkah) { a = 0;
Sumbu-x pada perangkat keras diatur melalui port B di mikrokontroler,
pergerakan stepper menggunakan mode half step sehingga stepper akan berputar
360o dalam 400 step. 3.4. Prosedur Penelitian
Prosedur penelitian terdiri dari beberapa tahap, mulai dari tahap
perancangan, pembuatan dan pengujian alat. Diagram alir dari prosedur penelitian
yang dilakukan dapat dilihat pada Gambar3.18.
Tahap perancangan, pada tahap ini penulis merancang program
antarmuka antara operator dan alat pengebor PCB otomatis dengan menggunakan
39
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Program antarmuka yang dirancang di Delphi XE5 harus memiliki kemampuan
menerjemahkan data posisi drill pad dari Proteus dan menyimpannya kedalam
database, menghitung jumlah langkah yang harus dilakukan oleh motor stepper
untuk menuju posisi drill pad pada gambar rancangan, melakukan komunikasi
serial dengan mikrokontroler, menampilkan posisi drill pad yang sedang
dikerjakan secara real time pada layar komputer dan fitur pendukung lainnya.
Perancangan sistem mekanik menggunakan Google Sketch Up Pro 8 dimana
sistem mekanik harus mampu menggerakan alat bor pada sumbu-x, sumbu-y, dan
sumbu-z dengan cara mengubah gerak rotasi dari motor stepper menjadi gerak
translasi sehingga mampu memberikan ketelitian minimal 1 mm. Dan terakhir
adalah perancangan mikrokontroler dimana mikrokontroler harus dapat
berkomunikasi dengan komputer secara serial melalui port USB dan menggerakan
40
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Pada tahap pembuatan, penulis mulai membuat sistem elektronik
meliputi program oleh Delphi XE5, program mikrokontroler oleh winAVR, dan
melakukan selftest dengan motor stepper tanpa dihubungkan ke alat mekanik.
Setelah pengujian dirasa berhasil penulis melanjutkan ke pembuatan alat mekanik
sesuai rancangan yang telah dirancang di Google Sketch Up Pro 8.
Tahap pengujian dilakukan setelah pembuatan alat selesai dan
fungsi-fungsi yang dirancang telah berhasil dengan baik, pengujian dilakukan dengan
mendesain gambar posisi drill pad pada Proteus 8.0 dan menggunakan lembaran
PCB sebagai media uji pengeboran.
Analisis data dilakukan dengan memperhatikan dan membandingkan
letak posisi drill pad pada gambar rancangan di Poteus dan hasil pengeboran oleh
sistem alat yang dibuat pada lembaran PCB.
41
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
3.5. Analisis Data
Pada bagian analisis data akan dijelaskan bagaimana hasil pengeboran PCB
secara otomatis oleh alat yang dibuat meliputi akurasi, presisi, kecepatan
pengeboran, ukuran maksimum dari PCB yang digunakan dan faktor-faktor apa
65
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB V PENUTUP
5.1. Kesimpulan
Area kerja PCB yang dapat dikerjakan pada alat ini adalah 15 cm x 10 cm,
pada prakteknya alat ini mampu melakukan instruksi pengeboran sesuai koordinat
pada gambar rancangan dan memiliki kesalahan rata – rata pada sumbu x sebesar
0,18 mm dan pada sumbu y sebesar 0,2 mm.
Kesimpulan yang dapat diambil dari penelitian ini adalah :
1. Mesin bor PCB otomatis berbasis mikrokontroler dan visual programming
berhasil dibangundengan memiliki kesalahan rata – rata pengeboran antara
hasil dan rancangan (CAD) sebesar 0,19 mm. Toleransi yang diizinkan pada
industri pembuatan PCB menurut ICI Technology Capability PCB adalah ± 2
mil atau ± 0,076 mm.
2. Mikrokontroler dapat menerima data yang dikirim oleh PC dan mengubahnya
menjadi perubahan sudut pada motor stepper. Perubahan sudut 360°/400
langkah diterapkan pada motor sumbu-x dan sumbu-y yang menghasilkan
perpindahan translasi sebesar 0,104109 mm/langkah, dan perubahan sudut
360°/200 langkah diterapkan pada motor di sumbu-z.
3. Program yang dibuat pada Delphi XE 5berhasil menerjemahkan data kordinat
excellon filedari program “Proteus” dan menyimpannya kedalam database
program. Program mampu menghitung jumlah langkah yang diperlukan dari
kordinat awal ke kordinat tujuan dari satu titik ke titik lain secara otomatis dan
mengirimkannya melalui port USB dengan baudrate sebesar 9600 bps.
Kordinat excellon filedapat dikonversi menjadi perpindahan translasi dengan
mengalikannya dengan bilangan kalibrasi sebesar 0,024617 pada sumbu-x dan
0,024231 pada sumbu-y.
5.2. Saran
Pada penelitian selanjutnya penulis memiliki beberapa saran yang dapat
dilakukan untuk meningkatkan akurasi pengeboran.
a. Untuk meningkatkan kecepatan pengeboran, sinkronisasi
66
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
mengatur motor stepper di sumbu-x dan sumbu-y untuk bergerak
secara bersamaan.
b. Penggunaan 2 buah motor stepper pada setiap sisi meja kerja dapat
dilakukan untuk meningkatkan akurasi pergerakan pada sumbu-y
alih – alih menggunakan 1 buah motor yang diletakkan di tengah
meja kerja.
c. Teknik latching dapat dilakukan pada ketiga motor stepper untuk
meningkatkan stabilitas mata bor ketika melakukan proses
pengeboran. Teknik ini dilakukan dengan cara menggunakan power
suply dengan ukuran 12V/3A, dan mengatur pin enable A dan
enable B pada IC L298N tetap berada pada kondisi high selama
67
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
DAFTAR PUSTAKA
Anonim. (2000). L298 Datasheet Dual Full Bridge Driver. ST Microelectronics.
Anonim. (2010). Stepper Motor Controller [Online]. Tersedia di
http://www.talkingelectronics.com/projects/Stepper%20Motor%20Control
ler/StepperMotor.html. [Diakses 10 Desember 2014].
Anonim. (2015). Drill Size [Online]. Tersedia di
http://www.microwaves101.com/encyclopedia/357-drill-sizes-microwave-encyclopedia-microwaves101.com. [Diakses 12 Maret 2015].
Ali, Muhamad. (2003). Mengakses Database pada Mengakses Database pada
Delphi dengan ADO[Online]. Tersedia di
http://www.ilmukomputer.com/pemrograman/delphi/database_ado/ali.html
. [Diakses 13 Januari 2015].
Bathni S., Ismul. (2010).Dasar Keterampilan Kelistrikan dan Elektronika.Bahan
Ajar Praktek Elektronika SMK.
Barhoumi EM, Ben salah B. (2011). New Positioning Control of Stepper Motor
using BP Neural Networks. Journal of Emerging Trends in Computing and
Information Sciences Volume 2 No.6 hal : 300-306.
Borenstein, J., Koren, Y. A Mobile Platform for Nursing Robots, IEEE
Transaction on Industrial Electronics, vol.32, no.2, pp. 158-165,1985.
Brindley, Keith. (2005). Starting Electronics Construction, Technology,
Equipment, and Project. Penerbit : Newnes, London.
Cantu, Marco. (2010). Delphi 2010 Handbook, Italy, Wintech Italia Srl.
Cashman, Shelly. (2010). Discovering Computer Ed.3.Penerbit : Salemba Infotek.
Gunawan. (2003). Perencanaan Dan Pembuatan Alat Pengebor Printed Circuit
Board Melalui IBM Pc Dengan Bantuan Mikrocontroler Mcs 48.
68
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Himaone. (2003). Stepper Motor and Its Driver.Reference of EAS 5407
Mechatronics Design Project.
Huang Dagui., (2010). Cao Hongbo, On composite position control of CNC
system feeding PMSM based on position feedforward and
SVPWM.Proceedings of the 2010 IEEE International Conference on
Mechatronics and Automation, pp.735-740.
Koren, Yoram. (1983).Computer Control of Manufacturing System. McGraw –
Hill.
Mahdavinejad, R.A. (2009). Introduction of serial architecture for small CNC
facilities. Journals of Achievements in Materialsand Manufacturing
Engineering. Volume 36Issue 1September, Hal :57.
Mrmak, Nebojsa. (2014).Resistor Sizes and Packages.[online]. Sumber
:http://www.resistorguide.com/resistor-sizes-and-packages/http://www.resistorguide.com/resistor-sizes-and-packages/.
diakses tanggal 17 agustus 2014.
Kalatiku, Protus Pieter dan Yuri Y.J. (2011). Pemrograman Motor Stepperdengan
Menggunakan Bahasa Pemrograman C. MEKTEK. Tahun XIII no. 1.
Muslim. (2008). I-Channel Egyptian Plasma [Online]. Tersedia di
http://www.cnczone.com/forums/plasma-edm-other-similar-machine-project-log/147003-cnc-forum-2.html. [Diakses 11 November 2014].
S, Wasito. (2001). Vademekum Elektronika. PT Gramedia Pustaka Utama,Jakarta.
Sanjaya, Taufik Adi. (2011). Interfacing Menggunakan Delphi.Makalah ilmu
komputer.
Syahrul. (2014). Motor Stepper : Teknologi, Metoda dan Rangkaian kontrol.
69
Fajar Arif Permata , 2015
RANCANG BANGUN MESIN BOR PCB DENGAN PENGATURAN POSISI 3D BERBASIS MIKROKONTROLER DAN VISUAL PROGRAMING
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Thiang, Sherwin R.U Sompie. (2002). Mesin Bor Otomatis dengan Menggunakan
Kamera untuk Mendeteksi Koordinat Bor. JURNAL TEKNIK MESIN
Universitas Petra Vol. 4, No. 2, hal: 88 – 93.