PENENTUAN KONSTANTA REDAMAN PENDULUM FISIS TUNGGAL DAN PENDULUM FISIS GABUNGAN MENGGUNAKAN LAGRANGIAN
DENGAN ANALISIS VIDEO
SKRIPSI
Diajukan Untuk Memenuhi Salah Satu Persyaratan Memperoleh Gelar Sarjana Pendidikan
Program Studi Pendidikan Fisika
Oleh:
DOMINICUS BAGUS CHRISTANTO NIM: 151424026
PROGRAM STUDI PENDIDIKAN FISIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA YOGYAKARTA
i
PENENTUAN KONSTANTA REDAMAN PENDULUM FISIS TUNGGAL DAN PENDULUM FISIS GABUNGAN MENGGUNAKAN LAGRANGIAN
DENGAN ANALISIS VIDEO
SKRIPSI
Diajukan Untuk Memenuhi Salah Satu Persyaratan Memperoleh Gelar Sarjana Pendidikan
Program Studi Pendidikan Fisika
Oleh:
DOMINICUS BAGUS CHRISTANTO NIM: 151424026
PROGRAM STUDI PENDIDIKAN FISIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA YOGYAKARTA
vi ABSTRAK
PENENTUAN KONSTANTA REDAMAN PENDULUM FISIS TUNGGAL DAN PENDULUM FISIS GABUNGAN MENGGUNAKAN LAGRANGIAN
DENGAN ANALISIS VIDEO
Dominicus Bagus Christanto Universitas Sanata Dharma
Yogyakarta 2019
Sebuah penelitian telah dilakukan untuk menentukan nilai konstanta redaman pada pendulum fisis tunggal dan pendulum fisis gabungan. Sebuah pendulum yang berayun secara bebas, perlahan-lahan akan kehilangan energinya dan lama kelamaan berhenti. Hal ini terjadi karena pendulum memiliki faktor redaman pada sistem geraknya. Penelitian ini menunjukkan nilai konstanta redaman yang dimiliki pendulum fisis tunggal dan pendulum fisis gabungan melalui persamaan geraknya. Persamaan gerak pendulum fisis tunggal dan pendulum fisis gabungan yang digunakan diperoleh menggunakan persamaan Lagrangian. Persamaan ini kemudian digunakan untuk melakukan fitting data yang diperoleh melalui analisis video pada software Loggerpro. Hasil penelitian ini menunjukkan ada satu persamaan gerak yang dimiliki oleh pendulum fisis tunggal dan ada dua persamaan gerak yang dimiliki oleh pendulum fisis gabungan.
Kata kunci: konstanta redaman, pendulum fisis tunggal, pendulum fisis gabungan, analisis video, Loggerpro
vii ABSTRACT
DETERMINATION OF THE DAMPING CONSTANT SINGLE PHYSICAL PENDULUM AND COMBINED PHYSICAL
PENDULUM USING LAGRANGIAN WITH VIDEO ANALYSIS
Dominicus Bagus Christanto Universitas Sanata Dharma
Yogyakarta 2019
A study has been conducted to determine the value of the damping constant in a single physical pendulum and a combined physical pendulum. A pendulum that swings freely, will slowly lose its energy and eventually stop. This happens because the pendulum has a damping factor in its motion system. This study shows the damping constant values of a single physical pendulum and a combined physical pendulum through the equation of motion. The equation of motion of a single physical pendulum and the combined physical pendulum used is obtained using the Lagrangian equation. This equation is then used to do data fitting obtained through video analysis on Loggerpro software. The results of this study indicate that there is one equation of motion that is possessed by a single physical pendulum and there are two equations of motion possessed by a combined physical pendulum.
Keywords: damping constants, single physical pendulum, combined physical pendulum, video analysis, Loggerpro
viii
KATA PENGANTAR
Puji dan syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa atas berkat rahmat serta kasih-Nya sehingga penulis dapat menyelesaikan skripsi ini dengan judul “Penentuan konstanta redaman pendulum fisis tunggal dan pendulum fisis gabungan menggunakan lagrangian dengan analisis video” Penulisan skripsi ini bertujuan untuk memenuhi sebagian syarat memperoleh gelar sarjana bagi mahasiswa program S1 pada program studi Program Studi Pendidikan Fisika Fakultas Keguruan dan Ilmu Pendidikan Universitas Sanata Dharma Yogyakarta.
Penulis menyadari bahwa proposal skripsi ini masih jauh dari kesempurnaan, oleh sebab itu penulis mengharapkan kritik dan saran yang bersifat membangun dari semua pihak demi kesempurnaan skripsi ini. Selesainya proposal ini tidak terlepas dari bantuan berbagai pihak, sehingga pada kesempatan ini penulis dengan segala kerendahan hati dan penuh rasa hormat mengucapkan terima kasih yang sebesar-besarnya kepada semua pihak yang telah memberikan bantuan moril maupun materiil secara langsung maupun tidak langsung kepada:
1. Bapak Dr. Yohanes Harsoyo, S.Pd., M.Si., selaku Dekan Fakultas Keguruan dan Ilmu Pendidikan Universitas Sanata Dharma.
2. Bapak Dr. Ignatius Edi Santosa, M.S., selaku Ketua Program Studi Pendidikan Fisika Fakultas Keguruan dan Ilmu Pendidikan Universitas Sanata Dharma dan dosen penguji Skripsi.
3. Bapak Prof. Dr. Paulus Suparno SJ, selaku Dosen Pembimbing Akademik angkatan tahun 2015 yang selalu memantau perkembangan penulisan skripsi mahasiswa-mahasiswinya.
4. Bapak Albertus Hariwangsa Panuluh, M.Sc., selaku dosen pembimbing dan dosen penguji yang telah banyak membantu dan memberikan bimbingan dalam pengerjaan Skripsi.
5. Ibu Ir. Sri Agustini Sulandari, M.Si., selaku dosen penguji yang telah banyak memberi masukan dalam penyempurnaan Skripsi.
6. Seluruh dosen Pendidikan Fisika yang telah membimbing dan memberikan banyak ilmu dalam perkuliahan selama kurang lebih empat tahun ini.
x
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... ii
HALAMAN PENGESAHAN ... iii
HALAMAN PERNYATAAN KEASLIAN KARYA ... iv
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI ILMIAH UNTUK KEPENTINGAN AKADEMIS ... v
ABSTRAK ... vi
ABSTRACT ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xii
DAFTAR TABEL ... xiii
BAB I PENDAHULUAN ... 1 1.1. Latar Belakang ... 2 1.2. Rumusan Masalah ... 3 1.3. Batasan Masalah ... 3 1.4. Tujuan Penelitian ... 4 1.5. Manfaat Penelitian ... 4
1) Manfaat untuk peneliti ... 4
2) Manfaat untuk pembaca ... 4
1.6. Sistematika Penulisan ... 5
BAB II DASAR TEORI ... 6
2.1. Gerak Harmonik Sederhana ... 6
2.2. Gerak Harmonik Teredam ... 9
2.3. Koordinat Umum dan Derajat Kebebasan ... 11
2.5. Lagrangian ... 13
2.5. Penyelesaian Pendulum Sederhana Menggunakan Lagrangian ... 14
xi
3.1. Persiapan Alat ... 17
3.2. Pengambilan Data ... 18
3.3. Analisis Menggunakan Loggerpro ... 19
BAB IV HASIL PENELITIAN DAN PEMBAHASAN ... 25
4.1. Hasil Penelitian ... 25
4.1.1. Pendulum fisis gabungan ... 25
4.1.2. Pendulum Fisis Tunggal ... 33
4.2.Pembahasan ... 37 BAB V PENUTUP ... 40 5.1. Kesimpulan ... 40 5.2. Saran ... 40 DAFTAR PUSTAKA ... 41 LAMPIRAN ... 42
Lampiran 1. Penyelesaian Persamaan Pada BAB V ... 42
Lampiran 2. Hasil Analisis Video Pada Loggerpro ... 48
A. Pendulum Fisis Tunggal untuk Sudut 8,07o ... 48
xii
DAFTAR GAMBAR
Gambar 2.1. Gerak Harmonik Sederhana ... 6
Gambar 2.2. Pendulum Sederhana ... 8
Gambar 2.3. Analisis Gaya pada Pendulum Sederhana ... 8
Gambar 2.4. Gerak Harmonik Teredam ... 9
Gambar 2.5. Pendulum Bergerak Dalam Bidang xy ... 12
Gambar 2.6. Ilustrasi Pendulum Sederhana... 14
Gambar 2.7. Analisis Pendulum Sederhana ... 14
Gambar 3.1. Gambar Rangkaian Pendulum fisis (Sebelah Kiri) dan Rangkaian Pendulum fisis gabungan (sebelah kanan) ... 19
Gambar 3.2. Fitur Movie Pada Menu Insert ... 20
Gambar 3.3. Ikon Set Scale Pada Fitur Analyzer ... 21
Gambar 3.4. Notifikasi Scale ... 21
Gambar 3.5. Ikon Set Origin Pada Fitur Analyzer ... 22
Gambar 3.6. Ikon Photo Distance Pada Loggerpro ... 22
Gambar 3.7. Hasil Pengukuran Komponen Panjang Pendulum Menggunakan Ikon Photo Distance Pada Loggerpro ... 23
Gambar 3.8. Ikon Add Point Pada Fitur Analyzer ... 24
Gambar 4.1. Ilustrasi Pendulum fisis gabungan ... 26
Gambar 4.2. Grafik Hasil Fitting Data Pertama Pada Sudut 8,07o Untuk Pendulum fisis gabungan ... 32
Gambar 4.3. Ilustrasi Pendulum Fisis Tunggal ... 34
Gambar 4.4. Grafik Hasil Fitting Data Pertama pada Sudut 8,07o Untuk Pendulum Fisis Tunggal ... 36
Gambar 4.5. Pendulum Fisis Tunggal dan Pendulum Fisis Gabungan pada Ketinggian yang Sama ... 39
xiii
DAFTAR TABEL
Tabel 4.1. Konstanta Redaman pada Pendulum Fisis Gabungan untuk Sudut 8,07o ... 32
Tabel 4.2. Konstanta Redaman Pada Pendulum Fisis Tunggal untuk Sudut 8,07o ... 37
1 BAB I PENDAHULUAN
1.1. Latar Belakang
Pendulum adalah sebuah benda yang digantungkan pada sebuah poros sehingga dapat mengalami osilasi. Osilasi adalah gerak bolak balik benda melalui titik setimbangnya dengan lintasan yang sama secara periodik (Serway, 2009). Pendulum dapat mengalami osilasi apabila disimpangkan dari posisi setimbangnya. Dalam kasus-kasus yang sering ditemui di soal Fisika SMA maupun SMP, pendulum diasumsikan dapat berosilasi tanpa kehilangan energi mekaniknya. Sehingga pendulum akan terus berosilasi dengan lintasan yang sama secara periodik dalam rentang waktu yang sama. Namun dalam kehidupan sehari-hari kejadian ini tidak bisa ditemukan. Pendulum yang disimpangkan akan mengalami osilasi teredam hingga pada akhirnya berhenti. Hal ini terjadi karena energi mekanik pada sistem tersebut terdisipasi oleh adanya hambatan udara ataupun gesekan internal di dalam sistem (Giancoli, 2014).
Penelitian tentang redaman pada pendulum telah beberapa kali dilakukan. Salah satunya adalah pengukuran penurunan amplitudo dari sebuah bola yang digantung pada seutas tali yang berosilasi. Bola yang berosilasi kemudian direkam untuk dianalisis menggunakan analisis video pada aplikasi Loggerpro. Berdasarkan penelitian ini penurunan amplitudo berbanding terbalik dengan massa bola dan berbanding terbalik dengan jari-jari bola (Limiansih, 2013).
Pendulum fisis gabungan adalah dua buah pendulum fisis yang digabungkan menggunakan sebuah laher, kemudian salah satu ujungnya dijadikan poros utama agar pendulum dapat berosilasi. Pendulum fisis gabungan yang disimpangkan dengan sudut simpangan besar, akan bergerak secara acak. Beberapa peneliti sebelumnya telah menemukan teori yang menunjukkan keteraturan dari pendulum fisis gabungan. Troy, Celso, Jack,
dan James (1992) adalah beberapa peneliti yang berhasil menyelesaikan persamaan untuk pendulum fisis gabungan yang mereka gunakan.
Penelitian lain terkait dengan pendulum fisis gabungan juga pernah dilakukan oleh Rafat, Wheatland, dan Bedding (2009). Mereka menggunakan dua buah lempeng logam yang berbentuk persegi empat, di mana kedua lempengan tersebut kemudian digabungkan dengan menggunakan laher. Penelitian ini terkhusus membahas persamaan gerak dari pendulum fisis gabungan yang mereka teliti. Pada penelitian ini mereka mempertimbangkan adanya faktor distribusi massa yang mempengaruhi gerak pendulum. Penelitian ini berhasil menyelesaikan persamaan gerak untuk pedulum fisis gabungan yang mereka gunakan.
Penelitian Rafat, Wheatland, dan Bedding seperti yang telah disebutkan tidak hanya membahas pendulum fisis gabungan. Namun penelitian ini bertujuan untuk menemukan persamaan gerak dari pendulum fisis gabungan yang mereka gunakan. Dalam kehidupan sehari-hari persamaan gerak memang penting. Salah satu penerapan persamaan gerak dalam kehidupan sehari-hari adalah perkiraan kedatangan kereta api yang di selesaikan menggunakan persamaan Gerak Lurus Beraturan (GLB) dan Gerak Lurus Berubah Beraturan (GLBB). Pada penelitian ini persamaan gerak pada pendulum fisis tunggal dan pendulum fisis gabungan digunakan untuk memperoleh konstanta redaman yang dimiliki oleh pendulum fisis tunggal dan pendulum fisis gabungan.
Penelitian ini dapat digunakan untuk mencari persamaan gerak pendulum fisis tunggal dan pendulum fisis gabungan, serta mengukur nilai konstanta redaman dari pendulum tersebut dengan menggunakan analisis video pada aplikasi Loggerpro. Konstanta redaman dapat diperoleh setelah melakukan fitting menggunakan persamaan yang diperoleh dari persamaan lagrangian. Melalui penelitian ini diharapkan dapat memberikan informasi dan referensi untuk menentukan konstanta redaman dari pendulum fisis tunggal maupun pendulum fisis gabungan. Selain itu penggunaan analisis video menggunakan aplikasi Loggerpro juga dapat diterapkan dalam pembelajaran di sekolah.
1.2. Rumusan Masalah
Berdasarkan latar belakang yang telah dipaparkan di atas, maka permasalahan yang akan dikaji dalam penelitian ini adalah:
1) Bagaimana cara menemukan persamaan pendulum fisis tunggal dan pendulum fisis gabungan dengan menggunakan Lagrangian dengan pendekatan sudut kecil?
2) Berapakah nilai konstanta redaman dari pendulum fisis tunggal dan pendulum fisis gabungan pada sudut kecil?
1.3. Batasan Masalah
Pada penelitian ini, permasalahan dibatasi pada:
1) Handycam yang digunakan memiliki kemampuan merekam sebanyak 90 fps (frame per second)
2) Laher pada pendulum fisis gabungan yang menggabungkan kedua pendulum massanya diabaikan
3) Massa pendulum fisis tunggal dan pendulum fisis gabungan dianggap identik, dengan massa masing-masing 0,04 kg
4) Panjang kedua pendulum pada pendulum fisis gabungan dianggap identik, dengan panjang masing-masing 0,2 m
5) Pada pendulum fisis gabungan digunakan pendekatan sudut kecil di mana
1.4. Tujuan Penelitian
Tujuan penelitian ini adalah untuk:
1) Menganalisis persamaan gerak pendulum fisis tunggal dan pendulum fisis gabungan menggunakan Lagrangian dengan pendekatan sudut kecil 2) Mengukur nilai konstanta redaman pada pendulum fisis tunggal dan
pendulum fisis gabungan yang digunakan
1.5. Manfaat Penelitian
Manfaat penelitian ini antara lain: 1) Manfaat untuk peneliti
a. Dapat menemukan persamaan gerak dari pendulum fisis tunggal dan pendulum fisis gabungan dengan pendekatan sudut kecil menggunakan lagrangian
b. Dapat membuktikan kebenaran persamaan yang telah ditemukan dengan menggunakan Loggerpro
c. Dapat mengetahui nilai konstanta redaman yang dimiliki pendulum fisis tunggal dan pendulum fisis gabungan
2) Manfaat untuk pembaca
a. Mengetahui cara penggunaan Loggerpro untuk analisis video b. Mengetahui persamaan gerak dari pendulum fisis tunggal dan
pendulum fisis gabungan dengan pendekatan sudut kecil
c. Mengetahui perbedaan nilai konstanta redaman pada pendulum fisis tunggal dan pendulum fisis gabungan
1.6. Sistematika Penulisan
Sistematika penulisan dalam skripsi ini adalah sebagai berikut: 1) BAB I Pendahuluan
BAB I membahas latar belakang penelitian, tujuan penelitian, rumusan masalah, batasan masalah, manfaat penelitian, dan sistematika penelitian.
2) BAB II Dasar Teori
BAB II berisikan hasil dasar teori tentang gerak harmonik sederhana, gerak harmonik teredam, lagrangian, derajat kebebasan, dan penyelesaian pendulum fisis menggunakan lagrangian.
3) BAB III Metodologi Penelitian
Bab ini memaparkan alat dan bahan yang digunakan, susunan alat-alat, proses pengambilan data, dan cara menganalisis data.
4) BAB IV Hasil Penelitian dan Pembahasan
Bab ini menguraikan hasil penelitian dan pembahasan hasil yang diperoleh.
5) BAB V Penutup
6 BAB II DASAR TEORI
2.1. Gerak Harmonik Sederhana 2.1.1. Sistem Pegas Massa
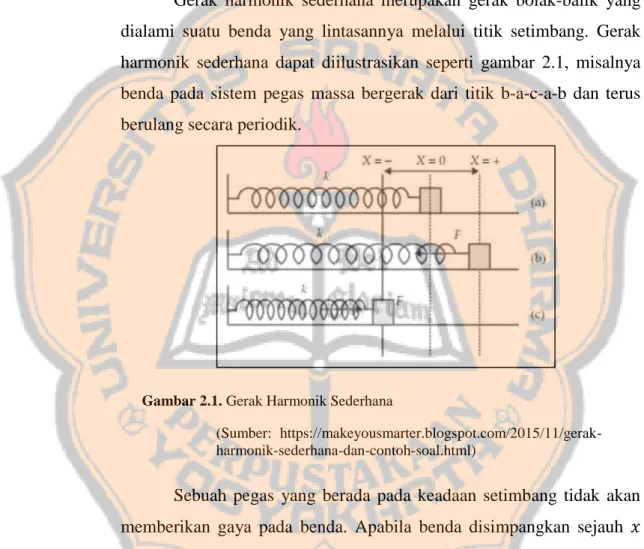
Gerak harmonik sederhana merupakan gerak bolak-balik yang dialami suatu benda yang lintasannya melalui titik setimbang. Gerak harmonik sederhana dapat diilustrasikan seperti gambar 2.1, misalnya benda pada sistem pegas massa bergerak dari titik b-a-c-a-b dan terus berulang secara periodik.
Gambar 2.1. Gerak Harmonik Sederhana
(Sumber: https://makeyousmarter.blogspot.com/2015/11/gerak-harmonik-sederhana-dan-contoh-soal.html)
Sebuah pegas yang berada pada keadaan setimbang tidak akan memberikan gaya pada benda. Apabila benda disimpangkan sejauh 𝑥
dari posisi setimbangnya, maka pegas akan memberikan gaya pemulih sesuai dengan hukum Hooke (Tipler, 1998):
𝐅𝐩 = −𝑘𝐱 (2.1)
dengan 𝐅𝐩 adalah gaya pemulih, 𝑘 adalah konstanta pegas, dan 𝐱 adalah simpangan dari posisi setimbang. Karena benda bergerak dalam sumbu
𝑥 dengan kecepatan yang berubah-ubah, maka persamaan geraknya memenuhi hukum II Newton
∑𝐅 = 𝑚𝐚 (2.2)
dengan gaya yang bekerja pada sistem pegas massa adalah hanya gaya pemulih, maka:
𝐅𝐩 = 𝑚𝐚 (2.3)
Karena benda hanya pada satu arah, yaitu sumbu x maka gaya pemulih dapat dituliskan sebagai berikut:
−𝑘𝑥 = 𝑚a (2.4) ⅆ2𝑥 ⅆ𝑡2 + ( 𝑘 𝑚) 𝑥 = 0 (2.5) dengan 𝑘 𝑚 adalah 𝜔
2, maka persamaan 2.5 dapat dituliskan menjadi:
ⅆ2𝑥 ⅆ𝑡2 + 𝜔
2𝑥 = 0 (2.6)
Solusi dari persamaan 2.6 pada sistem pegas massa adalah:
𝑥(𝑡) = 𝐴 sin (⍵𝑡 − 𝜙) (2.7)
dengan 𝐴 adalah amplitudo, ⍵ adalah kecepatan sudut, dan 𝜙 adalah beda fase.
2.1.2. Pendulum Sederhana
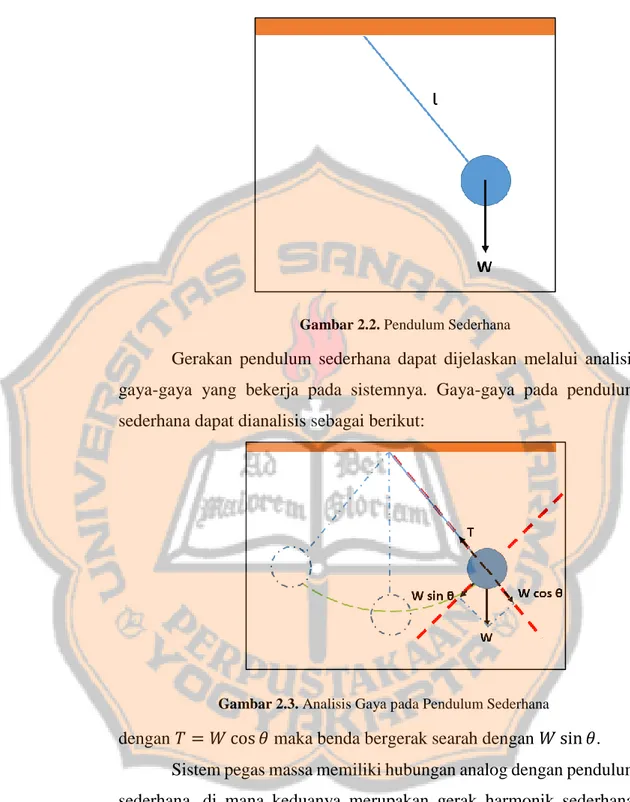
Pendulum sederhana adalah salah satu sistem yang menunjukkan peristiwa gerak harmonik sederhana. Pendulum sederhana terdiri dari sebuah benda bermassa yang digantung pada sebuah tali. Pendulum sederhana dapat diilustrasikan seperti pada gambar 2.2.
Gambar 2.2. Pendulum Sederhana
Gerakan pendulum sederhana dapat dijelaskan melalui analisis gaya-gaya yang bekerja pada sistemnya. Gaya-gaya pada pendulum sederhana dapat dianalisis sebagai berikut:
Gambar 2.3. Analisis Gaya pada Pendulum Sederhana
dengan 𝑇 = 𝑊 cos 𝜃 maka benda bergerak searah dengan 𝑊 sin 𝜃. Sistem pegas massa memiliki hubungan analog dengan pendulum sederhana, di mana keduanya merupakan gerak harmonik sederhana. Sehingga secara analog persamaan 2.6 pada pegas massa dapat dianalogkan dengan pendulum sederhana, sebagai berikut:
ⅆ2𝜃 ⅆ𝑡2 + 𝜔
dengan θ adalah sudut simpangan dari posisi setimbang pada pendulum. Solusi dari persamaan 2.8 pada sistem pendulum sederhana adalah:
𝜃(𝑡) = 𝐴 sin (⍵𝑡 − 𝜙) (2.7)
dengan 𝐴 adalah amplitudo, ⍵ adalah kecepatan sudut, dan 𝜙 adalah beda fase.
2.2. Gerak Harmonik Teredam
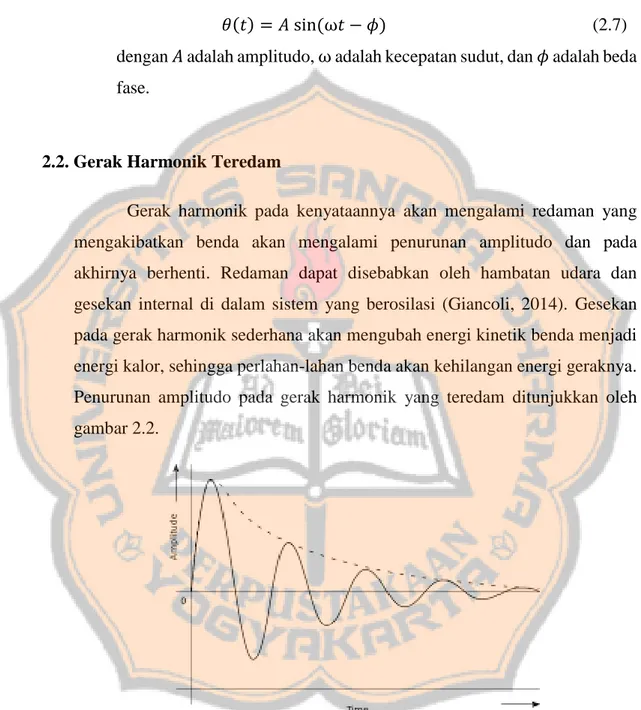
Gerak harmonik pada kenyataannya akan mengalami redaman yang mengakibatkan benda akan mengalami penurunan amplitudo dan pada akhirnya berhenti. Redaman dapat disebabkan oleh hambatan udara dan gesekan internal di dalam sistem yang berosilasi (Giancoli, 2014). Gesekan pada gerak harmonik sederhana akan mengubah energi kinetik benda menjadi energi kalor, sehingga perlahan-lahan benda akan kehilangan energi geraknya. Penurunan amplitudo pada gerak harmonik yang teredam ditunjukkan oleh gambar 2.2.
Gambar 2.4. Gerak Harmonik Teredam
(https://www.pngdownload.id/png-c4m18q/)
Gaya redaman sebanding dengan kecepatannya seperti persamaan berikut (Halliday, dkk., 2010):
𝐅𝐫 = −𝑏𝐯 (2.8) dengan 𝑏 adalah konstanta redaman dan 𝑣 adalah kecepatan benda. Pada sistem pendulum sederhana kecepatan yang bekerja pada benda adalah kecepatan sudut ⍵, maka persamaan gaya redaman untuk pendulum sederhana adalah:
𝐅𝐫 = −𝑏 ⍵ (2.9)
Pada sistem pendulum sederhana gaya redaman yang bekerja menerapkan hukum II Newton, dengan menggunakan pendekatan torsi maka persamaan 2.2 menjadi:
∑Ʈ = 𝐼𝛼 (2.10)
Ʈ𝐹+ Ʈ𝐹𝑟 = 𝐼𝛼 (2.11)
dengan Ʈ𝐹 adalah torsi dari gaya berat pendulum dan Ʈ𝐹𝑟 adalah torsi dari gaya redaman pendulum. Torsi dari gaya redaman pendulum bernilai negatif karena arahnya melawan arah gerak pendulum. Maka persamaan 2.10 dapat diturunkan secara matematis sebagai berikut:
− 𝑚𝑔𝑙 sin θ − 𝑏⍵ = 𝐼𝛼 (2.12) −𝑚𝑔𝑙 sin 𝜃 𝐼 − 𝑏 𝐼⍵ = 𝛼 (2.13) dengan 𝐼 = 𝑚𝑙2 , maka: ⅆ2𝜃 ⅆ𝑡2 + 𝑏 𝐼 ⅆ𝜃 ⅆ𝑡+ 𝑔 𝑙 sin 𝜃 = 0 (2.14) dengan menggunakan pendekatan sudut kecil dan 𝑔
𝑙 = ⍵ 2maka persamaan 2.14 menjadi: ⅆ2𝜃 ⅆ𝑡2 + 𝑏 𝐼 ⅆ𝜃 ⅆ𝑡 + ⍵ 2𝜃 = 0 (2.15)
Solusi dari persamaan 2.15 yang dapat digunakan untuk redaman kecil adalah:
dengan 𝐾 adalah faktor redaman dari persamaan dan konstanta redaman pendulum (b) diperoleh dari persamaan redaman kecil, maka:
𝑏 = 2𝐼𝐾 (2.17)
dengan b adalah konstanta redaman pendulum dan I adalah momen inersia pendulum.
2.3. Koordinat Umum dan Derajat Kebebasan
Koordinat umum adalah koordinat yang dapat menunjukkan posisi benda dalam ruang tiga dimensi. Koordinat umum menggambarkan posisi benda secara umum dan tidak terbatas pada satu koordinat. Koordinat umum dapat berupa koordinat kartesian, bola, maupun silinder.
Sebuah partikel yang berada di sebuah ruangan dapat ditentukan melalui 3 koordinat.. Jika sebuah partikel bergerak di dalam bidang, maka partikel tersebut memiliki 2 derajat kebebasan. Jika partikel tersebut bergerak di ruang 3 dimensi, maka derajat kebebasannya ada 3. Namun jika partikel memiliki kendala yang membatasi gerak partikel, maka partikel akan memiliki jumlah koordinat umum kurang dari 3N, dengan N adalah jumlah benda.
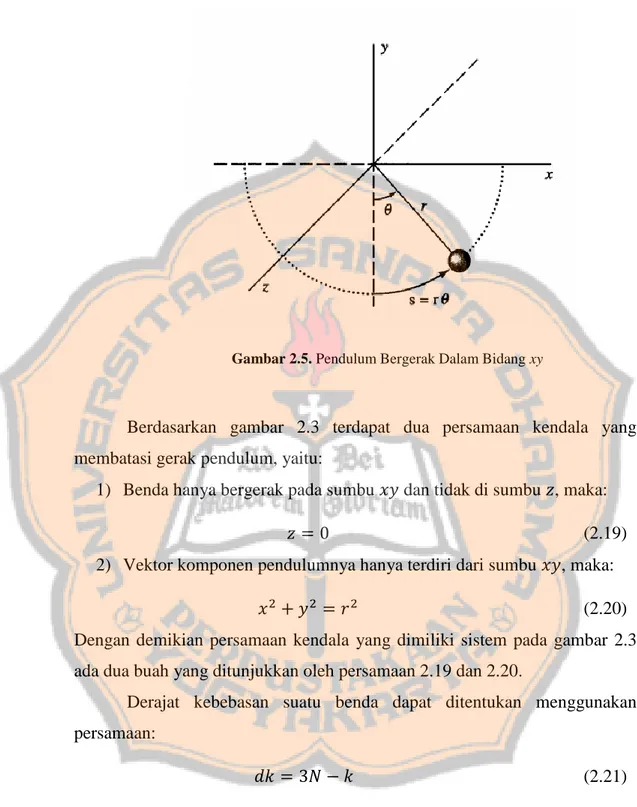
Derajat kebebasan (degree of freedom) digunakan untuk menunjukkan jumlah koordinat umum yang dimiliki oleh suatu sistem. Apabila benda memiliki kendala dalam sistemnya maka jumlah derajat kebebasan akan berkurang mengikuti persamaan 2.21. Kendala dalam sistem dapat dinyatakan dalam sebuah persamaan yang diberi nama persamaan kendala. Persamaan kendala adalah persamaan yang berasal dari gejala-gejala pada sistem yang sifatnya membatasi gerak sistem. Misalnya perhatikan gambar 2.3, sistem pada gambar ini dibatasi oleh bidang gerak xy sepanjang busur jari-jari r. Persamaan gerak dari pendulum tersebut dapat menggunakan vektor posisinya.
Gambar 2.5. Pendulum Bergerak Dalam Bidang xy
Berdasarkan gambar 2.3 terdapat dua persamaan kendala yang membatasi gerak pendulum, yaitu:
1) Benda hanya bergerak pada sumbu 𝑥𝑦 dan tidak di sumbu 𝑧, maka:
𝑧 = 0 (2.19)
2) Vektor komponen pendulumnya hanya terdiri dari sumbu 𝑥𝑦, maka:
𝑥2+ 𝑦2 = 𝑟2 (2.20)
Dengan demikian persamaan kendala yang dimiliki sistem pada gambar 2.3 ada dua buah yang ditunjukkan oleh persamaan 2.19 dan 2.20.
Derajat kebebasan suatu benda dapat ditentukan menggunakan persamaan:
ⅆ𝑘 = 3𝑁 − 𝑘 (2.21)
dengan 𝑁 adalah jumlah benda pada sistem dan 𝑘 adalah jumlah persamaan kendala pada sistem.
2.5. Lagrangian
Lagrangian merupakan persamaan yang berasal dari pengembangan hukum II Newton, dengan tujuan memudahkan penyelesaian persoalan fisika yang rumit. Lagrangian menggunakan koordinat umum dan dibatasi pada penggunaan koordinat kartesian dan koordinat polar. Lagrangian juga menggunakan pendekatan energi, seperti energi kinetik dan energi potensial benda sebagai dasar penyelesaiannya.
Analisis gerak dengan menggunakan hukum II Newton memenuhi persamaan 2.2. Namun dalam mekanika lanjut, digunakan analisis gerak menggunakan lagrangian. Secara umum lagrangian adalah selisih antara energi kinetik dan energi potensial yang dapat dituliskan sebagai berikut:
𝐿 = 𝑇 − 𝑉 (2.22)
dengan 𝑇 adalah energi kinetik dan 𝑉 adalah energi potensial.
Persamaan Euler-Lagrange tergantung pada jumlah variabel terikatnya. Misalnya pada gerak dua dimensi koordinat umumnya adalah 𝑥 dan 𝑦, maka persamaan Euler-Lagrange jika tidak ada gaya lain yang bekerja pada sistem adalah: ⅆ ⅆ𝑡( 𝜕𝐿 𝜕𝑥̇) − 𝜕𝐿 𝜕𝑥= 0 (2.23) dan ⅆ ⅆ𝑡( 𝜕𝐿 𝜕𝑦̇) − 𝜕𝐿 𝜕𝑦= 0 (2.24)
Apabila di dalam sistem terdapat gaya luar yang mengakibatkan gerakan benda teredam, maka persamaan di atas akan berubah karena adanya faktor redaman sistem. Misalnya persamaan 2.23, jika sistem teredam maka persamaannya akan berubah menjadi:
ⅆ ⅆ𝑡( 𝜕𝐿 𝜕𝑥̇) − 𝜕𝐿 𝜕𝑥= − 𝑏 ⅆ𝑥 ⅆ𝑡 (2.25)
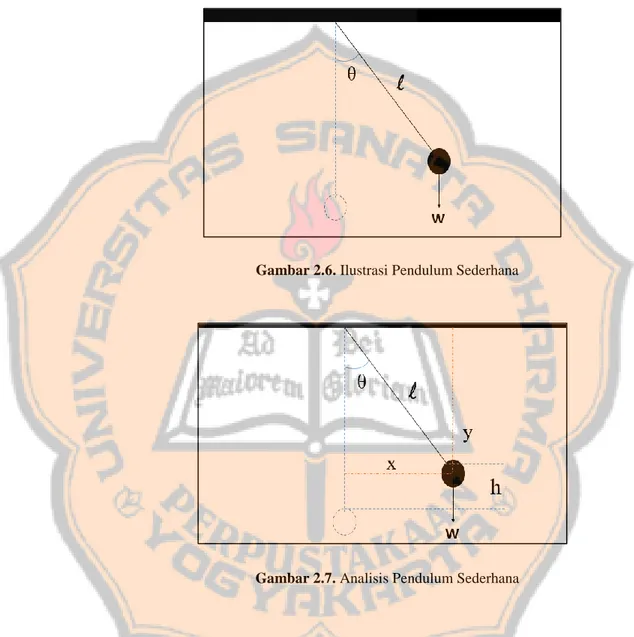
2.5. Penyelesaian Pendulum Sederhana Menggunakan Lagrangian
Pendulum Sederhana dapat dilihat seperti pada gambar 2.4, dengan komponen massa 𝑚, panjang 𝑙, dan sudut 𝜃.
Gambar 2.6. Ilustrasi Pendulum Sederhana
Gambar 2.7. Analisis Pendulum Sederhana
posisi benda dalam sumbu 𝑥 dapat dinyatakan dalam persamaan berikut:
𝑥 = 𝑙 sin 𝜃 (2.26)
untuk turunan terhadap waktu 𝑥 adalah 𝑥̇
𝑥̇ = 𝑙 cos 𝜃 𝜃̇ (2.27)
𝑦 = −𝑙 cos 𝜃 (2.28) untuk turunan terhadap waktu 𝑦 adalah 𝑦̇
𝑦̇ = 𝑙 sin 𝜃 𝜃̇ (2.29)
Pendulum yang diberikan simpangan, akan memiliki energi kinetik dan energi potensial. Besar energi kinetiknya mengikuti persamaan berikut:
𝑇 = 1 2𝑚𝑣 2 (2.30) 𝑇 = 1 2𝑚(𝑥̇ 2+ 𝑦̇2) (2.31) 𝑇 = 1 2𝑚[(𝑙 sin 𝜃 𝜃̇) 2+ (−𝑙 cos 𝜃 𝜃̇)2] (2.32) 𝑇 = 1 2𝑚𝑙 2𝜃2̇ (sin2𝜃 + cos2𝜃) (2.33) dengan 𝑠𝑖𝑛2𝜃 + 𝑐𝑜𝑠2𝜃 = 1, maka: 𝑇 = 1 2𝑚𝑙 2𝜃2̇ (2.34)
energi potensial pendulum sederhana mengikuti persamaan berikut:
𝑉 = 𝑚𝑔ℎ (2.35)
dengan ℎ = 𝑦, maka:
𝑉 = − 𝑚𝑔𝑙 cos 𝜃 (2.36)
dengan menggunakan persamaan lagrangian maka persamaan 2.34 dan 2.36 disubstitusikan ke persamaan 2.22, sehingga diperoleh:
𝐿 = 1 2𝑚𝑙
2𝜃̇2+ 𝑚𝑔𝑙 cos 𝜃 (2.37)
berdasarkan persamaan 2.33, maka persamaan Euler-Lagrange dapat diperoleh sebagai berikut:
ⅆ ⅆ𝑡[ 𝜕 (12 𝑚𝑙2𝜃2̇ + 𝑚𝑔𝑙 cos 𝜃) 𝜕𝜃̇ ] − 𝜕 (12 𝑚𝑙2𝜃̇ + 𝑚𝑔𝑙 cos 𝜃) 𝜕θ = 0 (2.38) 𝑚𝑙2𝜃̈ + 𝑚𝑔𝑙 sin 𝜃 = 0 (2.39)
𝜃̈ +𝑔
𝑙 sin 𝜃 = 0
(2.40) dengan 𝑔
𝑙 adalah ⍵0
2 dan dengan menggunakan pendekatan sudut kecil, maka:
𝜃̈ + ⍵02 𝜃 = 0 (2.41)
solusi dari persamaan 2.41 adalah:
17 BAB III
METODE PENELITIAN
Penelitian ini bertujuan untuk menemukan persamaan gerak dari pendulum fisis gabungan menggunakan metode lagrangian dengan pendekatan sudut kecil, yang kemudian dibuktikan menggunakan aplikasi Loggerpro. Adapun tujuan lainnya adalah untuk mengetahui besarnya konstanta redaman yang dimiliki pendulum fisis gabungan dan pendulum fisis. Untuk menemukan persamaan gerak pendulum fisis gabungan diperoleh dengan cara menurunkan energi kinetik dan energi potensial pendulum menggunakan persamaan lagrangian. Untuk tujuan yang lain ditentukan dengan terlebih dahulu merekam gerakan pendulum fisis dan pendulum fisis gabungan yang telah dilakukan menggunakan handycam Panasonic 90x. Setelah perekaman, video hasil perekaman akan dianalisis menggunakan aplikasi Loggerpro.
Secara umum penelitian ini dibagi menjadi beberapa tahap yaitu: tahap pertama adalah persiapan alat. Tahap kedua adalah pengambilan data, dan Tahap ketiga adalah melakukan adalah analisis video menggunakan aplikasi Loggerpro.
3.1. Persiapan Alat
Alat yang digunakan dalam penelitian ini meliputi: 1) Pendulum
Pendulum yang digunakan terbuat dari penggaris plastik yang dipasangkan dengan laher. Penggaris plastik dipilih karena mudah didapatkan, murah, memiliki ukuran yang sama (dengan merek yang sama), dan massanya relatif sama. Selain itu penggaris dipilih karena mudah dilubangi untuk meletakkan laher, dibandingkan dengan kayu ataupun logam lainnya. Penggaris plastik juga cukup kokoh dan tidak
mudah berubah bentuk, sehingga sangat sesuai digunakan sebagai pendulum.
2) Laher
Laher digunakan untuk mengurangi gesekan antara pendulum dengan penyangga. Sehingga faktor redaman yang digunakan diharapkan hanya berasal dari pendulum.
3) Handycam
Handycam yang digunakan untuk merekam gerak pendulum adalah Panasonic 90x.
4) Tripod
Tripod digunakan untuk meletakkan handycam, sehingga
handycam dapat diatur satu garis lurus dengan pendulum dan dalam keadaan datar.
5) Papan tulis hitam
Papan tulis dipilih sebagai background supaya kontras dengan titik putih yang ada pada pendulum.
6) Tipp-ex dan spidol
Tipp-ex digunakan untuk memberikan tanda pada pendulum sehingga memudahkan dalam proses analisis gerakan pendulum. Spidol hitam digunakan untuk menghitamkan bagian di sekeliling tipp-ex, sehingga sama dengan background.
3.2. Pengambilan Data
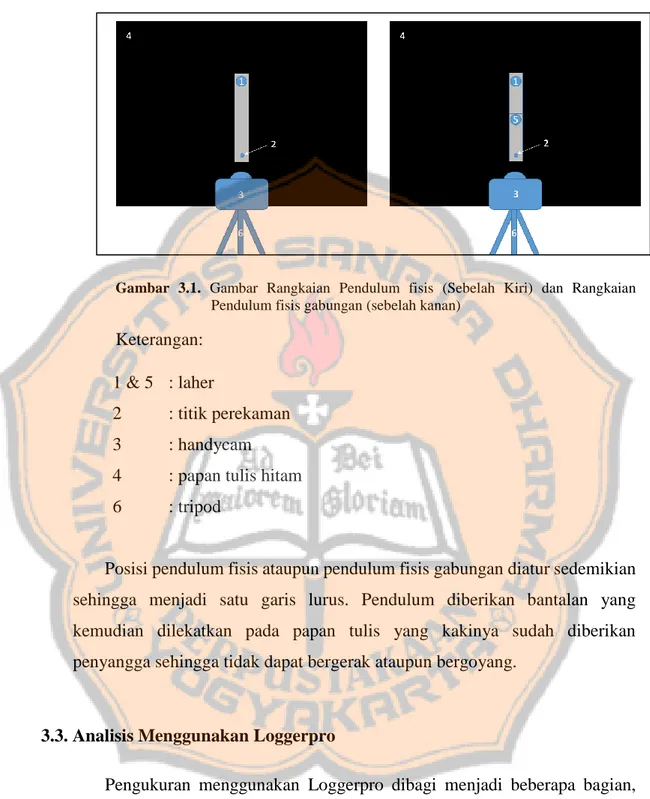
Pengambilan data dilakukan dengan melakukan perekaman gerak dari pendulum fisis dan pendulum fisis gabungan. Bagian perekaman diawali dengan penyusunan alat yang telah disiapkan. Alat yang telah disiapkan lalu di susun seperti pada gambar 3.1.
Gambar 3.1. Gambar Rangkaian Pendulum fisis (Sebelah Kiri) dan Rangkaian Pendulum fisis gabungan (sebelah kanan)
Keterangan: 1 & 5 : laher
2 : titik perekaman 3 : handycam
4 : papan tulis hitam 6 : tripod
Posisi pendulum fisis ataupun pendulum fisis gabungan diatur sedemikian sehingga menjadi satu garis lurus. Pendulum diberikan bantalan yang kemudian dilekatkan pada papan tulis yang kakinya sudah diberikan penyangga sehingga tidak dapat bergerak ataupun bergoyang.
3.3. Analisis Menggunakan Loggerpro
Pengukuran menggunakan Loggerpro dibagi menjadi beberapa bagian, pertama adalah pengukuran sudut yang digunakan. kedua adalah analisis gerakan dari pendulum fisis dan pendulum fisis gabungan. Adapun langkah-langkah pengukurannya dilakukan sebagai berikut:
1) Pengukuran sudut
Pengukuran sudut yang diberikan dilakukan menggunakan fitur
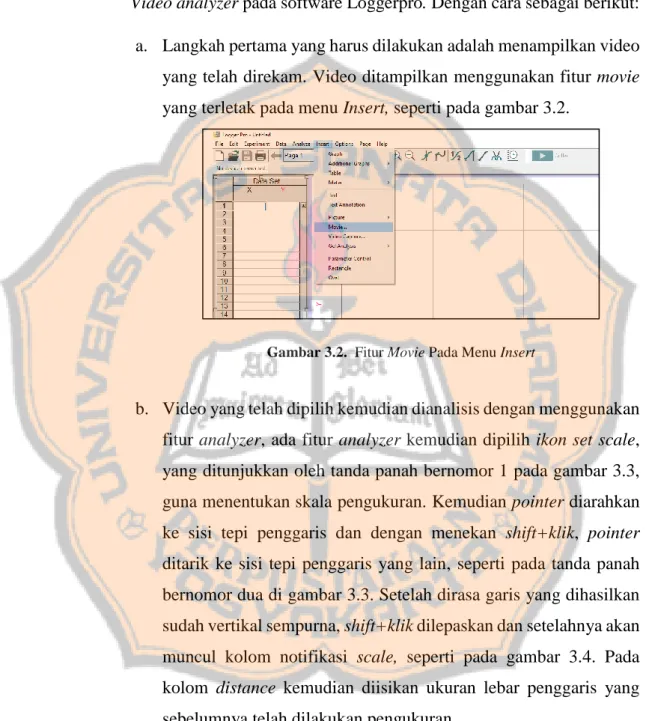
Video analyzer pada software Loggerpro. Dengan cara sebagai berikut: a. Langkah pertama yang harus dilakukan adalah menampilkan video yang telah direkam. Video ditampilkan menggunakan fitur movie
yang terletak pada menu Insert, seperti pada gambar 3.2.
Gambar 3.2. Fitur Movie Pada Menu Insert
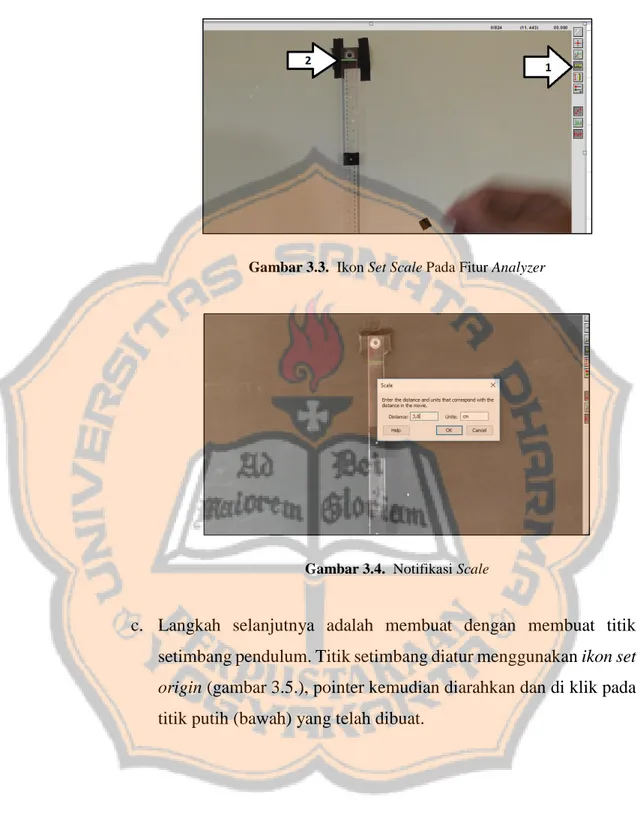
b. Video yang telah dipilih kemudian dianalisis dengan menggunakan fitur analyzer, ada fitur analyzer kemudian dipilih ikon set scale, yang ditunjukkan oleh tanda panah bernomor 1 pada gambar 3.3, guna menentukan skala pengukuran. Kemudian pointer diarahkan ke sisi tepi penggaris dan dengan menekan shift+klik, pointer
ditarik ke sisi tepi penggaris yang lain, seperti pada tanda panah bernomor dua di gambar 3.3. Setelah dirasa garis yang dihasilkan sudah vertikal sempurna, shift+klik dilepaskan dan setelahnya akan muncul kolom notifikasi scale, seperti pada gambar 3.4. Pada kolom distance kemudian diisikan ukuran lebar penggaris yang sebelumnya telah dilakukan pengukuran.
Gambar 3.3. Ikon Set Scale Pada Fitur Analyzer
Gambar 3.4. Notifikasi Scale
c. Langkah selanjutnya adalah membuat dengan membuat titik setimbang pendulum. Titik setimbang diatur menggunakan ikon set origin (gambar 3.5.), pointer kemudian diarahkan dan di klik pada titik putih (bawah) yang telah dibuat.
Gambar 3.5. Ikon Set Origin Pada Fitur Analyzer
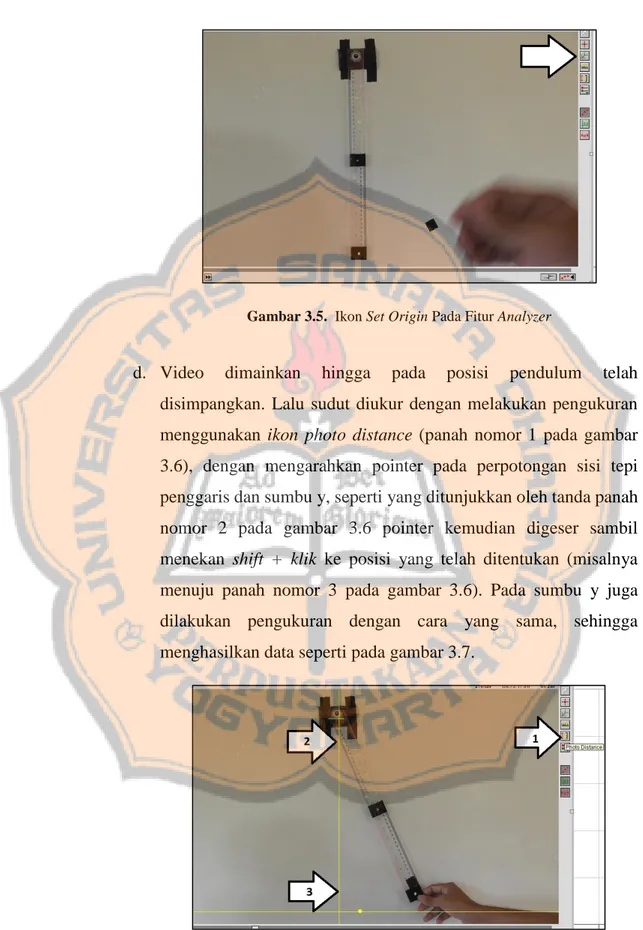
d. Video dimainkan hingga pada posisi pendulum telah disimpangkan. Lalu sudut diukur dengan melakukan pengukuran menggunakan ikon photo distance (panah nomor 1 pada gambar 3.6), dengan mengarahkan pointer pada perpotongan sisi tepi penggaris dan sumbu y, seperti yang ditunjukkan oleh tanda panah nomor 2 pada gambar 3.6 pointer kemudian digeser sambil menekan shift + klik ke posisi yang telah ditentukan (misalnya menuju panah nomor 3 pada gambar 3.6). Pada sumbu y juga dilakukan pengukuran dengan cara yang sama, sehingga menghasilkan data seperti pada gambar 3.7.
Gambar 3.7. Hasil Pengukuran Komponen Panjang Pendulum Menggunakan Ikon Photo Distance Pada Loggerpro
e. Setelah diperoleh komponen panjang pendulum pada sumbu 𝑥 dan
𝑦 seperti pada gambar 3.7, maka sudut yang digunakan untuk dapat diperoleh menggunakan fungsi tangensial.
2) Analisis gerakan pendulum fisis dan pendulum fisis gabungan
Analisis gerakan pendulum fisis dan pendulum fisis gabungan dilakukan untuk memperoleh konstanta redaman. Langkah-langkah yang dilakukan sebagai berikut:
a. Langkah awal yang dilakukan sama seperti poin a sampai poin b pada pengukuran sudut.
b. Analisis gerakan pendulum fisis dan pendulum fisis gabungan dilakukan menggunakan ikon add point pada fitur analyzer
(gambar 3.8.). pointer diarahkan ke titik putih (bawah) yang telah dibuat kemudian diklik dan dilakukan perekaman pergerakan pendulum pada video.
Gambar 3.8. Ikon Add Point Pada Fitur Analyzer
c. Nilai konstanta redaman kemudian diperoleh dengan melakukan
fiting terhadap data yang diperoleh dengan menggunakan persamaan 𝑦(𝑡) = 𝐴𝑒−𝐵𝑡 sin (𝐶𝑥 + 𝐷).
25 BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
4.1.Hasil Penelitian
4.1.1. Pendulum fisis gabungan
a. Derajat kebebasan pendulum fisis gabungan
Derajat kebebasan dapat ditentukan setelah persamaan kendala yang dimiliki suatu sistem diketahui. Persamaan kendala pendulum fisis gabungan meliputi:
a) Pendulum fisis gabungan hanya bergerak pada satu bidang
(𝑥, 𝑦), sehingga sumbu 𝑧 pada titik nol. Pada pendulum pertama:
𝑧1 = 0 (4.1)
dan pada pendulum kedua:
𝑧2 = 0 (4.2)
b) Posisi pendulum fisis gabungan pada sumbu 𝑥 dan 𝑦, terkungkung oleh panjang lengan pendulum. Sehingga pada pendulum pertama dapat dinyatakan melalui persamaan:
𝑥12+ 𝑦12 = 𝑙12 (4.3)
dan pada pendulum kedua:
𝑥22+ 𝑦22 = 𝑙22 (4.4)
dari persamaan di atas diketahui bahwa ada empat persamaan kendala pada pendulum fisis gabungan.
Derajat kebebasan dari pendulum fisis kemudian dapat diperoleh dari persamaan 2.21. Sehingga diperoleh persamaan kendala pada pendulum fisis gabungan sebagai berikut:
ⅆ𝑘 = 3(2) − 4 ⅆ𝑘 = 2
dengan demikian maka diketahui ada dua derajat kebebasan untuk pendulum fisis gabungan, yang juga menandakan bahwa jumlah koordinat umum pada pendulum fisis gabungan ada dua buah. b. Penyelesaian persamaan gerak pendulum fisis gabungan
menggunakan lagrangian
Pendulum fisis gabungan diilustrasikan seperti gambar 4.1. karena pendulum fisis gabungan ini adalah benda pejal yang memiliki massa, maka dalam analisis ini momen inersia yang dimiliki pendulum ikut diperhatikan.
27 berdasarkan gambar 4.1 posisi benda pada sumbu 𝑥 dan sumbu 𝑦 dapat diperoleh melalui persamaan berikut:
𝑥1 = 1 2𝑙1sin 𝜃1 (4.5) 𝑥2 = 𝑙1sin 𝜃1+1 2𝑙2sin 𝜃2 (4.6) 𝑦1 = −1 2𝑙1cos 𝜃1 (4.7) 𝑦2 = −𝑙1cos 𝜃1−1 2𝑙2cos 𝜃2 (4.8)
Turunan terhadap waktu dari persamaan posisi 𝑥 dan 𝑦 adalah:
𝑥1̇ =1 2𝑙1cos 𝜃1𝜃̇1 (4.9) 𝑥2̇ = 𝑙1cos 𝜃1𝜃̇1 + 1 2𝑙2cos 𝜃2𝜃̇2 (4.10) 𝑦1̇ =1 2𝑙1sin 𝜃1𝜃̇1 (4.11) 𝑦2̇ = 𝑙1sin 𝜃1𝜃̇1 +1 2𝑙2sin 𝜃2𝜃̇2 (4.12)
Berdasarkan analisa gambar 4.1, energi potensial dari sistem dapat diperoleh sebagai berikut:
𝑉 = −1
2 𝑚1𝑔𝑙1cos 𝜃1+ 𝑚2𝑔 (−𝑙1cos 𝜃1− 1
28 𝑉 = −𝑔𝑙1cos 𝜃1( 1 2𝑚1+ 𝑚2) − 1 2𝑚2𝑔𝑙2cos 𝜃2 (4.14)
Energi kinetik sistem pada gambar 4.1 dapat dinyatakan sebagai berikut:
𝑇 = 1 2𝑚1𝑣1 2+1 2𝑚2𝑣2 2 (4.15) 𝑇 =1 2𝑚1(𝑥̇1 2+ 𝑦̇ 12) + 1 2𝑚2(𝑥̇2 2 + 𝑦̇ 22) (4.16) 𝑇 =1 8𝑙1𝜃̇1 2(𝑚 1+ 4𝑚2) + 1 8𝑚2𝑙2𝜃̇2 2+1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2 𝑐𝑜𝑠(𝜃1+ 𝜃2) (4.17)
dengan menggunakan persamaan lagrangian maka persamaan 4.14 dan 4.17 disubstitusikan ke persamaan 2.22, sehingga diperoleh:
𝐿 =1 8𝑙1𝜃̇1 2 (𝑚1+ 4𝑚2) + 1 8𝑚2𝑙2𝜃̇2 2 +1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2cos(𝜃1+ 𝜃2) + 𝑔𝑙1cos 𝜃1( 1 2𝑚1+ 𝑚2) + 1 2𝑚2𝑔𝑙2cos 𝜃2 (4.18)
Dengan asumsi bahwa pendulum akan mengalami redaman kecil, maka persamaan Euler-Lagrange untuk θ1adalah: ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇1] − 𝜕𝐿 𝜕𝜃1 = −𝑏1 ⅆ𝜃1 ⅆ𝑡 (4.19)
29 untuk 𝑑 𝑑𝑡[ 𝜕𝐿 𝜕𝜃̇1] ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇1 ] = ⅆ ⅆ𝑡{ 𝜕 [18 𝑙1𝜃̇1 2 (𝑚1+ 4𝑚2) +18 𝑚2𝑙2𝜃̇2 2
+12 𝑚2𝑙1𝑙2𝜃̇1𝜃̇2cos(𝜃1+ 𝜃2) + 𝑔𝑙1cos 𝜃1(12 𝑚1+ 𝑚2) +12 𝑚2𝑔𝑙2cos 𝜃2] 𝜕𝜃̇1 } (4.20) ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇1] = 1 4𝑙1 2𝜃̈ 1(𝑚1+ 4𝑚2) + 𝑚2𝑙1𝑙2𝑐𝑜𝑠(𝜃1− 𝜃2)𝜃̈2 − 𝑚2𝑙1𝑙2𝑠𝑖𝑛(𝜃1− 𝜃2)(𝜃1̇ − 𝜃2̇ )𝜃̇2 (4.21) untuk 𝜕 𝜕𝜃1 𝜕𝐿 𝜕𝜃1 = 𝜕 𝜕𝜃1 [1 8𝑙1𝜃̇1 2 (𝑚1+ 4𝑚2) + 1 8𝑚2𝑙2𝜃̇2 2 +1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2 𝑐𝑜𝑠(𝜃1+ 𝜃2) + 𝑔𝑙1cos 𝜃1( 1 2𝑚1+ 𝑚2) + 1 2𝑚2𝑔𝑙2cos 𝜃2] (4.22) 𝜕𝐿 𝜕𝜃1 = − 1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2𝑠𝑖𝑛(𝜃1− 𝜃2) − 𝑔𝑙1sin 𝜃1( 1 2𝑚1+ 𝑚2) (4.23)
Persamaan 4.21 dan persamaan 4.23 disubstitusikan ke persamaan 4.19, kemudian diturunkan secara matematis. penurunan persamaan 4.19 dapat dilihat pada lampiran 1, maka diperoleh persamaan koordinat umum yang pertama pada pendulum fisis gabungan sebagai berikut: d2𝜃1 ⅆ𝑡2 + 𝑏1 𝐼1 ⅆ𝜃1 ⅆ𝑡 + ⍵1 2𝜃 1 = 0 (4.24) dengan 𝐼1 = 9 4𝑚𝑙 2; dan ⍵ 12 = 2 3 𝑔 𝑙
30 berdasarkan persamaan 4.24 diperoleh solusi untuk persamaan gerak pendulum fisis gabungan sebagai berikut:
𝜃1 = 𝐴𝑒−𝐵1𝑡sin(⍵1𝑡 + 𝜙) (4.25)
dengan 𝐵1 = 𝑏1
2𝐼1
Dengan asumsi bahwa pendulum akan mengalami redaman kecil, maka persamaan Euler-Lagrangian untuk 𝜃2 adalah:
ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇2 ] − 𝜕𝐿 𝜕𝜃2 = −𝑏2 ⅆ𝜃2 ⅆ𝑡 (4.26) untuk 𝑑 𝑑𝑡[ 𝜕𝐿 𝜕𝜃̇2] ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇2 ] = ⅆ ⅆ𝑡{ 𝜕 [18 𝑙1𝜃̇1 2 (𝑚1+ 4𝑚2) +18 𝑚2𝑙2𝜃̇2 2
+12 𝑚2𝑙1𝑙2𝜃̇1𝜃̇2cos(𝜃1+ 𝜃2) + 𝑔𝑙1cos 𝜃1(12 𝑚1+ 𝑚2) + 𝑚2𝑔𝑙2cos 𝜃2] 𝜕𝜃̇2 } (4.27) ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇2] = 1 4𝑚2𝑙2 2𝜃̈ 2 + 1 2𝑚2𝑙1𝑙2𝜃̈1𝑐𝑜𝑠(𝜃1− 𝜃2) − 1 2𝑚2𝑙1𝑙2𝑠𝑖𝑛(𝜃1− 𝜃2)(𝜃1̇ − 𝜃2̇ )𝜃̇2 (4.28) untuk 𝜕 𝜕𝜃2 𝜕𝐿 𝜕𝜃2 = 𝜕 𝜕𝜃2 [1 8𝑙1𝜃̇1 2 (𝑚1+ 4𝑚2) + 1 8𝑚2𝑙2𝜃̇2 2 +1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2cos(𝜃1+ 𝜃2) + 𝑔𝑙1cos 𝜃1( 1 2𝑚1+ 𝑚2) + 𝑚2𝑔𝑙2cos 𝜃2] (4.29)
𝜕𝐿 𝜕𝜃2 = − 1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2sin(𝜃1− 𝜃2) − 1 2𝑚2𝑔𝑙2sin 𝜃2 (4.30)
Persamaan 4.28 dan persamaan 4.30 disubstitusikan ke persamaan 4.26, kemudian diturunkan secara matematis. penurunan persamaan 4.26 dapat dilihat pada lampiran 1. Maka diperoleh persamaan koordinat umum yang kedua pada pendulum fisis gabungan sebagai berikut:
ⅆ2𝜃2 ⅆ𝑡2 + 𝑏2 𝐼2 ⅆ𝜃2 ⅆ𝑡 + ⍵2 2𝜃 2 = 0 (4.31) dengan dengan 𝐼2 = 3 4𝑚𝑙 2 dan⍵ 2 2 =2 3 𝑔 𝑙
berdasarkan persamaan 4.31 diperoleh solusi untuk persamaan gerak pendulum fisis gabungan sebagai berikut:
𝜃2 = 𝐴𝑒−𝐵2𝑡sin(⍵
2𝑡 + 𝜙)
dengan 𝐵2 = 𝑏2
2𝐼2
(4.32)
c. Analisis konstanta redaman pendulum fisis gabungan menggunakan Loggerpro
Konstanta redaman pendulum fisis gabungan ditentukan dengan cara seperti yang telah dijelaskan pada BAB III dengan menggunakan persamaan 4.32. persamaan ini dipilih karena pengambilan data dilakukan pada titik yang berada pada di lengan bawah pendulum fisis gabungan. Berikut adalah hasil fitting untuk data pertama pada sudut 8,07o :
Gambar 4.2. Grafik Hasil Fitting Data Pertama Pada Sudut 8,07o Untuk
Pendulum fisis gabungan
Dari gambar 4.2 faktor redaman dari persamaan pada pendulum fisis gabungan ditunjukkan oleh variabel B, di mana untuk data pertama dengan sudut 8,07o memiliki faktor redaman sebesar 0,05664. Kemudian konstanta redaman pendulum fisis gabungan dapat ditentukan sebagai berikut:
𝑏2 = 2𝐼2𝐵2 𝑏2 = 2 × [ 3 2× 0,04 × (0,4) 2] × 0,05664 𝑏2 = 1,09 × 10−3 kg m2/s
dengan menggunakan cara yang sama data berikutnya dianalisis, sehingga diperoleh tabel hasil analisis sebagai berikut:
Tabel 4.1. Konstanta Redaman pada Pendulum Fisis Gabungan untuk Sudut 8,07o
Data Konstanta Redaman (Kg m2/s) 1 0,001087 2 0,001116 3 0,001126 4 0,001152 5 0,001103
4.1.2. Pendulum Fisis Tunggal
a. Derajat kebebasan pendulum fisis tunggal
Derajat kebebasan dapat ditentukan setelah persamaan kendala yang dimiliki suatu sistem diketahui. Persamaan kendala pendulum fisis tunggal meliputi:
a) Pendulum fisis tunggal hanya bergerak pada satu bidang (𝑥, 𝑦), sehingga sumbu 𝑧 pada titik nol. Sehingga persamaan kendalanya dapat dituliskan:
𝑧 = 0 (4.36)
b) Posisi pendulum fisis tunggal pada sumbu 𝑥 dan 𝑦, terkendala oleh panjang lengan pendulum. Dengan jumlah kuadrat 𝑥 dan 𝑦
tidak akan lebih besar ataupun lebih kecil dari kuadrat panjang lengan pendulum. Sehingga persamaan kendalanya dapat dituliskan:
𝑥2+ 𝑦2 = 𝑙2 (4.37)
dari persamaan di atas, diketahui bahwa ada dua persamaan kendala pada pendulum fisis tunggal.
Derajat kebebasan dari pendulum fisis tunggal kemudian dapat diperoleh dari persamaan 2.21. Sehingga diperoleh persamaan kendala pada pendulum fisis tunggal sebagai berikut:
ⅆ𝑘 = 3(1) − 2 ⅆ𝑘 = 1
dengan demikian maka diketahui ada satu derajat kebebasan untuk pendulum fisis tunggal, yang juga menandakan bahwa jumlah koordinat umum pada pendulum fisis tunggal ada satu buah.
b. Penyelesaian persamaan gerak pendulum fisis tunggal menggunakan lagrangian
Gambar 4.3. Ilustrasi Pendulum Fisis Tunggal
berdasarkan gambar 4.4 posisi benda pada sumbu 𝑥 dan sumbu 𝑦
dapat diperoleh melalui persamaan berikut:
𝑥 =1 2𝑙 sin 𝜃 (4.33) 𝑦 = −1 2𝑙 cos 𝜃 (4.34) Turunan terhadap waktu dari persamaan posisi 𝑥 dan 𝑦 adalah:
𝑥̇ =1 2𝑙 cos 𝜃 𝜃̇ (4.35) 𝑦̇ =1 2𝑙 sin 𝜃 𝜃̇ (4.36) Berdasarkan gambar 4.4, energi potensial dari sistem dapat diperoleh sebagai berikut:
𝑉 = 𝑚𝑔ℎ (4.37)
𝑉 = −1
2𝑚𝑔𝑙 cos 𝜃
(4.38) Energi kinetik sistem pada gambar 4.4 dapat dinyatakan sebagai berikut:
𝑇 =1 2𝑚(𝑥̇ 2 + 𝑦̇2) (4.39) 𝑇 =1 2𝑚 [( 1 2𝑙 cos 𝜃𝜃̇) 2 + (−1 2𝑙 sin 𝜃 𝜃̇) 2 ] (4.40) 𝑇 =1 8𝑚𝑙 2𝜃̇2 (4.41)
dengan menggunakan persamaan lagrangian maka persamaan 4.38 dan 4.41 disubstitusikan ke persamaan 2.22, sehingga diperoleh:
𝐿 = 1 8𝑚𝑙
2𝜃̇2+ 1
2𝑚𝑔𝑙 cos 𝜃
(4.42)
dengan asumsi bahwa pendulum akan mengalami redaman kecil, maka persamaan Euler-Lagrangian untuk θ adalah:
ⅆ ⅆ𝑡[ 𝜕 (18𝑚𝑙2𝜃̇2+ 1 2𝑚𝑔𝑙 cos 𝜃) 𝜕𝜃̇ ] − 𝜕 ( 18𝑚𝑙2𝜃̇2+ 1 2𝑚𝑔𝑙 cos 𝜃) 𝜕θ = −𝑏3 𝜕𝜃 𝜕𝑡 (4.43)
Persamaan 4.43 kemudian diturunkan secara matematis, untuk uraian penurunannya dapat dilihat pada lampiran 1. Setelah dilakukan penurunan, maka persamaan koordinat umum pendulum fisis tunggal akan diperoleh sebagai berikut:
ⅆ2𝜃 ⅆ𝑡2 + 𝑏3 𝐼3 ⅆ𝜃 ⅆ𝑡 + ⍵3 2𝜃 = 0 (4.44) dengan ⍵32 = 2𝑔 𝑙; dan 𝐼3 = 1 4𝑚𝑙 2, Berdasarkan persamaan 4.44
diperoleh solusi untuk persamaan gerak pendulum fisis tunggal sebagai berikut:
𝜃 = 𝐴𝑒−𝐵3𝑡sin(⍵
3𝑡 − 𝜙) (4.45)
dengan 𝐵3 = 𝑏3
c. Analisis konstanta redaman pendulum fisis tunggal menggunakan Loggerpro
Konstanta redaman pendulum fisis tunggal ditentukan dengan cara seperti yang telah dijelaskan pada bab III dengan menggunakan persamaan 4.45. Berikut adalah hasil fitting untuk data pertama pada sudut 8,07o :
Gambar 4.4. Grafik Hasil Fitting Data Pertama pada Sudut 8,07o Untuk
Pendulum Fisis Tunggal
Dari gambar 4.5 faktor redaman dari persamaan pada pendulum fisis tunggal ditunjukkan oleh variabel B, di mana untuk data pertama dengan sudut 8,07o memiliki faktor redaman sebesar 0,05965. Sedangkan untuk konstanta redaman pendulum fisis tunggal dapat diperoleh sebagai berikut:
𝑏3 = 2𝐼3𝐵
𝑏3 = 2 × 2 × 0,04 × 0,42× 0,05965 𝑏3 = 1,52 × 10−2𝑘𝑔 𝑚2/𝑠
dengan menggunakan cara yang sama data berikutnya dianalisis, sehingga diperoleh tabel hasil analisis sebagai berikut:
Tabel 4.2. Konstanta Redaman Pada Pendulum Fisis Tunggal untuk Sudut 8,07o
Data Konstanta Redaman (Kg m2/s) 1 0,001527 2 0,001512 3 0,001522 4 0,001525 5 0,001524 Rata-rata dan Ralat (1,52 ± 0,01) × 10-3
4.2. Pembahasan
Penelitian ini memiliki empat tujuan seperti yang sudah disebutkan pada BAB I. Tujuan pertama penelitian ini adalah menemukan persamaan umum dari pendulum fisis gabungan menggunakan metode lagrangian dengan pendekatan sudut kecil. Sesuai dengan yang telah dijelaskan pada dasar teori, bahwa jumlah persamaan umum dapat diketahui dari derajat kebebasannya. Pada bagian hasil ditemukan bahwa pendulum fisis gabungan memiliki dua derajat kebebasan yang berarti pendulum fisis gabungan memiliki dua persamaan umum. Sedangkan pendulum fisis hanya memiliki satu derajat kebebasan sehingga pendulum fisis hanya memiliki satu persamaan umum. Persamaan yang diperoleh untuk pendulum fisis gabungan ditunjukkan oleh persamaan 4.25 dan 4.32, sedangkan untuk pendulum fisis ditunjukkan oleh persamaan 4.45.
Pendulum fisis gabungan memiliki dua buah solusi yaitu untuk sudut yang pertama (𝜃1) dan sudut yang kedua (𝜃2). Karena 𝜃1 ≈ 𝜃2, maka dalam analisis dapat menggunakan salah satu solusi tersebut. Pada penelitian ini sudut yang digunakan untuk analisis data pada pendulum fisis gabungan adalah 𝜃2.
Pendulum yang digunakan dalam penelitian ini ada dua jenis, yaitu pendulum fisis gabungan dan pendulum fisis. Dengan kedua pendulum
terbuat dari penggaris yang dilubangi dan diberi laher sebagai poros, sehingga pendulum dapat berayun dengan bebas dan mengurangi terjadinya gesekan antara pendulum dan poros putarnya. Pendulum yang telah dirangkai kemudian disimpangkan dan direkam menggunakan
handycam Panasonic 90x. Setelah diberikan simpangan pendulum mulai berosilasi dan lama kelamaan pendulum akan berhenti. Peristiwa ini menunjukkan bahwa pendulum mengalami osilasi teredam. Redaman yang dialami pendulum merupakan redaman kecil, di mana dapat dilihat pada gambar 4.2 ataupun gambar 4.5 terjadi pengurangan amplitudo secara perlahan.
Pengurangan amplitudo setiap waktu ini kemudian disebut sebagai konstanta redaman pendulum. Konstanta redaman pendulum dapat diperoleh dengan menggunakan analisis video yang telah direkam menggunakan loggerpro dan melakukan fitting data yang diperoleh seperti yang telah dilakukan pada bagian hasil yang ada pada BAB IV. Nilai konstanta redaman pendulum fisis tunggal adalah (1,52 ± 0,01) × 10-3 Kg
m2/s dan pada pendulum fisis gabungan adalah (1,12 ± 0,05) × 10-3 Kg m2/s.
Terdapat perbedaan nilai konstanta redaman pendulum fisis tunggal dan pendulum fisis gabungan. Berdasarkan hasil pengamatan, hal ini dapat terjadi karena pada saat pendulum gabungan berayun dan mencapai titik yang sama dengan pendulum fisis tunggal (gambar 4.8). Lengan bawah pendulum gabungan memberikan dorongan kepada lengan atas pendulum gabungan (gambar 4.9). Sehingga pendulum gabungan dapat memiliki simpangan yang lebih jauh dibandingkan dengan pendulum fisis tunggal.
Gambar 4.5. Pendulum Fisis Tunggal dan Pendulum Fisis Gabungan pada Ketinggian yang Sama
Gambar 4.6. Pendulum Fisis Gabungan Menyimpang Lebih Jauh
Kualitas perekaman memiliki pengaruh yang sangat besar dalam penelitian ini. Sehingga perekaman harus dilakukan pengulangan hingga beberapa kali untuk memperoleh hasil yang terbaik. Namun karena keterbatasan kemampuan perekaman dari handycam yang digunakan, mengakibatkan perekaman untuk sudut yang lebih besar dari 60o tidak dapat diamati. Dalam penelitian ini sempat terjadi kesulitan dalam proses analisis video di loggerpro, karena gambar yang dihasilkan kurang maksimal bahkan beberapa frame terlihat tidak fokus. Namun karena banyaknya data diperoleh sudah cukup untuk menunjukkan peristiwa osilasi teredam yang diharapkan dan dapat diamati dengan jelas.
40 BAB V PENUTUP
5.1. Kesimpulan
a. Ada dua buah persamaan gerak untuk pendulum fisis gabungan yaitu:
𝜃1 = 𝐴𝑒−𝐵1𝑡sin( ⍵
1𝑡 − 𝜙)
dan
𝜃2 = 𝐴𝑒−𝐵2𝑡sin( ⍵
2𝑡 − 𝜙)
b. Nilai konstanta redaman untuk sudut kecil pada pendulum fisis tunggal adalah (1,52 ± 0,01) × 10-3 Kg m2/s dan pada pendulum fisis gabungan adalah
(1,12 ± 0,05) × 10-3 Kg m2/s
5.2. Saran
Bagi pembaca yang memiliki minat untuk melakukan penelitian serupa ataupun melanjutkan penelitian ini, penulis menyarankan untuk:
a. Menggunakan kamera atau handycam dengan kualitas perekaman di atas 90 fps. Supaya pada saat analisis menggunakan Loggerpro tidak terdapat
frame yang tidak jelas dan meningkatkan ketelitian dalam penelitian. b. Menemukan solusi untuk batasan masalah pada poin 1.3.2, di mana pada
penelitian ini massa laher masih di abaikan.
c. Memperhatikan kontras benda yang diamati dengan background. Karena jika benda dan background tidak kontras maka akan menyulitkan peneliti pada bagian analisis.
d. Memperhatikan kondisi lingkungan terutama keadaan cahaya dan angin, yang dapat mempengaruhi proses pengambilan data.
41
DAFTAR PUSTAKA
Giancoli, Douglas C. 2014. Fisika Prinsip dan Aplikasi. Jilid ke-1. Edisi ke-7. Diterjemahkan oleh Irzam. Jakarta: Erlangga.
Halliday, D., dan Resnick, R.1984. Fisika Dasar. Edisi Ketiga Jilid 2. Jakarta: Erlangga.
Limiansih, K., Santosa, I. E. (2013) Redaman Pada Pendulum fisis. Jurnal Fisika Indonesia. XVII (Desember), 17-20.
Rafat, M. Z., Wheatland, M. S., Bedding, T. R. 2009. Dynamics of a double pendulum with distributed mass. American Journal of Physics 77. 216 (2009): 216-223
Tipler, P. A. 1998. Fisika untuk Sains dan Teknik. Jilid ke-1. Diterjemahkan oleh Lea Prasetio dan Rahmad W. Adi. Jakarta: Erlangga.
Shinbrot, T., Grebogi, C., Wiasom, J. 1992. Chaos in a double pendulum. American Journal of Physics. 491 (1992): 491-499
42
LAMPIRAN
Lampiran 1. Penyelesaian Persamaan Pada BAB V A. Penyelesaian Persamaan 4.23 ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇1] − 𝜕𝐿 𝜕𝜃1 = −𝑏1 ⅆ𝜃1 ⅆ𝑡 𝑙1 2 𝜃̈1(𝑚1+ 𝑚2) + 𝑚2𝑙1𝑙2𝑐𝑜𝑠(𝜃1− 𝜃2)𝜃̈2− 𝑚2𝑙1𝑙2𝑠𝑖𝑛(𝜃1− 𝜃2)(𝜃1̇ − 𝜃2̇ )𝜃̇2+ 1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2𝑠𝑖𝑛(𝜃1− 𝜃2) + 𝑔𝑙1sin 𝜃1( 1 2𝑚1+ 𝑚2) = −𝑏1 ⅆ𝜃1 ⅆ𝑡
dengan 𝑚1 ≈ 𝑚2 ≈ 𝑚; 𝜃1 ≈ 𝜃2 ; dan 𝑙1 ≈ 𝑙2 ≈ 𝑙; maka:
1 4𝑙 2𝜃̈ 1(5𝑚) + 𝑚𝑙2𝜃̈1+ 𝑔𝑙 sin 𝜃1( 3 2𝑚) = −𝑏1 ⅆ𝜃1 ⅆ𝑡 9 4𝑚𝑙 2𝜃̈ 1+ 3 2𝑚𝑔𝑙 sin 𝜃1 = −𝑏1 ⅆ𝜃1 ⅆ𝑡
dengan persamaan di atas kemudian dibagi dengan 9
4𝑚𝑙 2, maka: 𝜃̈1 +2 3 𝑔 𝑙sin 𝜃1 = − 𝑏1 9 4 𝑚𝑙2 ⅆ𝜃1 ⅆ𝑡
43 dengan 9 4𝑚𝑙 2 = 𝐼 1; 2 3 𝑔
𝑙 = ⍵1; dan persamaan di atas didekati menggunakan pendekatan sudut kecil di mana sin 𝜃1 ≈ 𝜃1, maka
diperoleh persamaan 4.24: ⅆ2𝜃1 ⅆ𝑡2 + 𝑏1 𝐼1 ⅆ𝜃1 ⅆ𝑡 + ⍵1 2𝜃 1 = 0 B. Penyelesaian Persamaan 4.31 ⅆ ⅆ𝑡[ 𝜕𝐿 𝜕𝜃̇2] − 𝜕𝐿 𝜕𝜃2 = −𝑏2 ⅆ𝜃2 ⅆ𝑡 1 4𝑚2𝑙2 2𝜃̈ 2+ 1 2𝑚2𝑙1𝑙2𝜃̈1𝑐𝑜𝑠(𝜃1− 𝜃2) − 1 2𝑚2𝑙1𝑙2𝑠𝑖𝑛(𝜃1− 𝜃2)(𝜃̇1− 𝜃̇2)𝜃̇2+ 1 2𝑚2𝑙1𝑙2𝜃̇1𝜃̇2𝑠𝑖𝑛(𝜃1− 𝜃2) + 1 2𝑚2𝑔𝑙2sin 𝜃2= −𝑏2 ⅆ𝜃2 ⅆ𝑡
dengan 𝑚1 ≈ 𝑚2 ≈ 𝑚; 𝜃1 ≈ 𝜃2 ≈ 𝜃 ; dan 𝑙1 ≈ 𝑙2 ≈ 𝑙; maka:
1 4𝑚𝑙 2𝜃̈ 2 + 1 2𝑚𝑙 2𝜃̈ 2+ 1 2𝑚𝑔𝑙 sin 𝜃2 = −𝑏2 ⅆ𝜃2 ⅆ𝑡 3 4𝑚𝑙 2𝜃̈ 2 + 1 2𝑚𝑔𝑙 sin 𝜃2 = −𝑏2 ⅆ𝜃2 ⅆ𝑡
dengan persamaan di atas kemudian dibagi dengan 3
4𝑚𝑙
𝜃̈ +2 3 𝑔 𝑙 sin 𝜃 = − 𝑏2 3 4 𝑚𝑙2 ⅆ𝜃 ⅆ𝑡 dengan 3 4𝑚𝑙 2 = 𝐼 2; 2 3 𝑔 𝑙 = ⍵2
2; dan persamaan di atas didekati menggunakan
pendekatan sudut kecil di mana sin 𝜃2 ≈ 𝜃2, maka diperoleh persamaan 4.24: ⅆ2𝜃 2 ⅆ𝑡2 + ⍵2 2𝜃 2+ 𝑏2 𝐼2 ⅆ𝜃2 ⅆ𝑡 = 0 C. Penyelesaian Persamaan 4.48 ⅆ ⅆ𝑡[ 𝜕 (18 𝑚𝑙2𝜃̇2+ 12 𝑚𝑔𝑙 cos 𝜃) 𝜕𝜃̇ ] − 𝜕 ( 18 𝑚𝑙2𝜃̇2+ 12 𝑚𝑔𝑙 cos 𝜃) 𝜕θ = −𝑏3 ⅆ𝜃 ⅆ𝑡 1 4𝑚𝑙 2𝜃̈ +1 2𝑚𝑔𝑙 sin 𝜃 = −𝑏3 ⅆ𝜃 ⅆ𝑡
dengan persamaan di atas kemudian dibagi dengan 1
4𝑚𝑙 2, maka: 𝜃̈ + 2𝑔 𝑙 sin 𝜃 = − 𝑏3 1 4 𝑚𝑙2 ⅆ𝜃 ⅆ𝑡 dengan 1 4𝑚𝑙 2 = 𝐼 3; 2 𝑔
𝑙 = ⍵3; dan persamaan di atas didekati menggunakan
pendekatan sudut kecil di mana sin 𝜃 ≈ 𝜃, maka diperoleh persamaan 4.49:
ⅆ2𝜃 ⅆ𝑡2 + ⍵32𝜃 + 𝑏3 𝐼3 ⅆ𝜃3 ⅆ𝑡 = 0
Lampiran 2. Hasil Analisis Video Pada Loggerpro A. Pendulum Fisis Tunggal untuk Sudut 8,07o
1. Data I
2. Data II
4. Data IV
B. Pendulum Fisis Gabungan untuk Sudut 8,07o
1. Data I
2. Data II
4. Data IV