INTERPOLASI: METODE
POLINOMIAL NDD
(NEWTON’S DIVIDED
DIFFERENCE)
Dr.Eng. Agus S. Muntohar
Dr.Eng. Agus S. Muntohar 1
Apa Interpolasi?
2
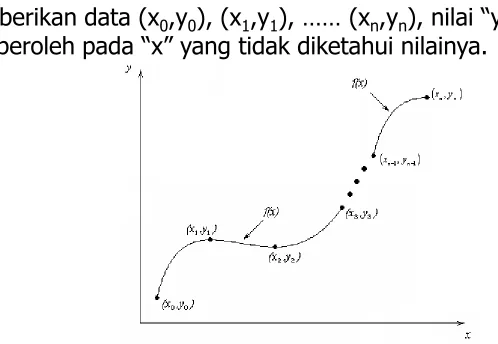
Diberikan data (x
0,y
0), (x
1,y
1), ……
(x
n,y
n), nilai “y”
diperoleh pada “x” yang tidak diketahui nilainya.
Interpolan
3
Bentuk polinomial merupakan interpolan yang
paling sering dipilih karena mudah untuk
melakukan:
Evaluasi
Turunan, dan
Interpolasi Linier Metode NDD
4
Diberikan data (x
0,y
0), (x
1,y
1), dan bentuk
interpolan linier yang melalui data tersebut adalah
dengan
)
(
)
(
0 1 01
x
b
b
x
x
f
)
(
00
f
x
b
0 1
0 1
1
)
(
)
(
x
x
x
f
x
f
b
Contoh 1
5
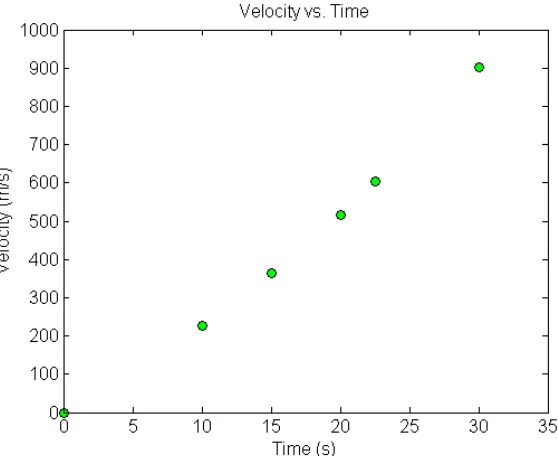
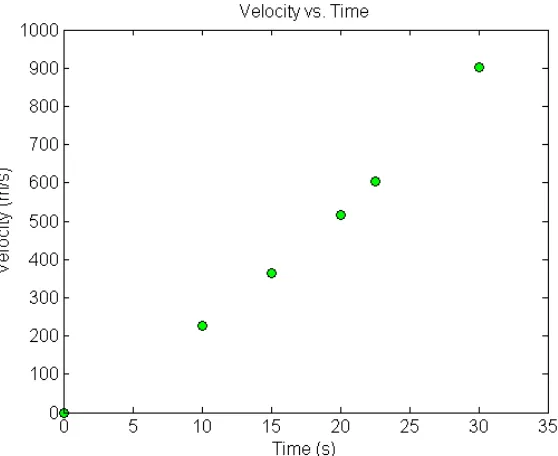
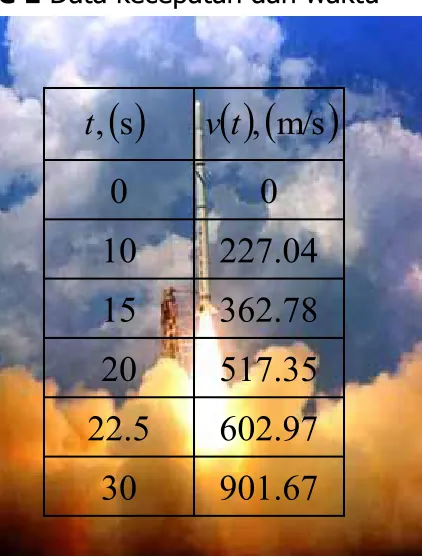
0 0 10 227.04 15 362.78 20 517.35 22.5 602.97 30 901.67
Table 1 Data kecepatan dan waktu
Gambar 2 Plot data kecepatan dan waktu
untuk Contoh 1
s ,t v
t , m/sKecepatan dorong sebuah roket diberikan sebagai fungsi waktu pada Tabel 1. Tentukan kecepatan roket pada t = 16 detik dengan menggunakan Metode Interpolasi Linier
Interpolasi Linier Metode NDD
6
10 12 14 16 18 20 22 24 350
400 450 500 550 517.35
362.78 ys
f range( ) f x de sire d
xs 110
xs
010 xsrangexde sire d
)
(
)
(
t
b
0b
1t
t
0v
0 0
1 1
15;
( )
362.78
20;
( )
517.35
t
v t
t
v t
0
( )
0362.78
b
v t
1 0
1
1 0
( )
( )
30.914
v t
v t
b
t
t
Interpolasi Linier Metode NDD
7
10 12 14 16 18 20 22 24 350
400 450 500 550 517.35
362.78 ys f range( ) f x de sire d
xs 110 xs
010 xsrangexde sire d
) (
)
(t b0 b1 t t0
v
362.7830.914(t 15), 15 t 20
At t 16
) 15 16
( 914 . 30 78
. 362 )
16
(
v
Interpolasi Quadratic Metode NDD
8)
)(
(
)
(
)
(
0 1 0 2 0 12
x
b
b
x
x
b
x
x
x
x
f
)
(
00
f
x
b
0 1 0 1 1)
(
)
(
x
x
x
f
x
f
b
0 2 0 1 0 1 1 2 1 2 2)
(
)
(
)
(
)
(
x
x
x
x
x
f
x
f
x
x
x
f
x
f
b
Contoh 2
9
0 0 10 227.04 15 362.78 20 517.35 22.5 602.97 30 901.67
Table 1 Data kecepatan dan waktu
Gambar 2 Plot data kecepatan dan waktu
untuk Contoh 1
s ,t v
t , m/sInterpolasi KuadratMetode NDD
10
10 12 14 16 18 20
200 250 300 350 400 450 500 550 517.35
227.04 ys f range( ) f x de sire d
20 10 xsrangexde sire d
,
10
0
t
v
(
t
0)
227
.
04
,
15
1
t
v
(
t
1)
362
.
78
,
20
2
t
v
(
t
2)
517
.
35
Interpolasi KuadratMetode NDD
11
)
(
0 0v
t
b
227
.
04
0 1 0 1 1
)
(
)
(
t
t
t
v
t
v
b
10
15
04
.
227
78
.
362
27
.
148
Quadratic Interpolation (contd)
12
)
)(
(
)
(
)
(
t
b
0b
1t
t
0b
2t
t
0t
t
1v
227
.
04
27
.
148
(
t
10
)
0
.
37660
(
t
10
)(
t
15
),
10
t
20
At
t
16
,
v
(
16
)
227
.
04
27
.
148
(
16
10
)
0
.
37660
(
16
10
)(
16
15
)
392
.
19
m/s
Nilai kesalahan perkiraan dari hasil interpoasi linier dan kuadrat yaitu :
a
x
100
19
.
392
69
.
393
19
.
392
Bentuk Umum: Interpolasi Kuadrat
Metode NDD
13)
)(
(
)
(
)
(
0 1 0 2 0 12
x
b
b
x
x
b
x
x
x
x
f
dimana
Ditulis kembali menjadi
)
)(
](
,
,
[
)
](
,
[
]
[
)
(
0 1 0 0 2 1 0 0 12
x
f
x
f
x
x
x
x
f
x
x
x
x
x
x
x
f
)
(
]
[
0 00
f
x
f
x
b
Bentuk Umum
14
Untuk (n1) titik data,
x0,y0
, x1, y1
,...,
xn1,yn1
, xn,yn
yang dituliskan sebagai
) )...(
)( (
.... )
( )
( 0 1 0 n 0 1 n1
n x b b x x b x x x x x x
f
dimana
] [ 0
0 f x
b
] , [ 1 0
1 f x x
b
] , ,
[ 2 1 0
2 f x x x
b
] ,...., ,
[ 1 2 0
1 f x x x
bn n n
] ,...., ,
[x x 1 x0 f
Bentuk Umum
15
Bentuk polinomial derjat tiga dari
(
x
0,
y
0),
(
x
1,
y
1),
(
x
2,
y
2),
dan
(
x
3,
y
3),
adalah
)
)(
)(
](
,
,
,
[
)
)(
](
,
,
[
)
](
,
[
]
[
)
(
2 1 0 0 1 2 3 1 0 0 1 2 0 0 1 0 3x
x
x
x
x
x
x
x
x
x
f
x
x
x
x
x
x
x
f
x
x
x
x
f
x
f
x
f
0 b 0x f(x0) b1
] , [x1 x0
f b2
1
x f(x1) f[x2,x1,x0] b3
] , [x2 x1
f f[x3,x2,x1,x0]
2
x f(x2) f[x3,x2,x1]
] , [x3 x2 f
3
Contoh 3
16
0 0 10 227.04 15 362.78 20 517.35 22.5 602.97 30 901.67
Table 1 Data kecepatan dan waktu
Gambar 2 Plot data kecepatan dan waktu
s ,t v
t , m/sContoh 3
17
Profil kecepatan untuk polinomial derajat tiga
)
)(
)(
(
)
)(
(
)
(
)
(
t
b
0b
1t
t
0b
2t
t
0t
t
1b
3t
t
0t
t
1t
t
2v
Diperlukan 4 titik data yang terdekat dengan t = 16
, 10
0
t
v(t0) 227.04
, 15
1
t
v(t1) 362.78
, 20
2
t
v(t2) 517.35
,
5 . 22
3
t v(t3) 602.97
Diperoleh nilai dari konstanta yaitu
:Contoh 3
18
b
0= 227.04; b
1= 27.148; b
2= 0.37660; b
3= 5.4347×10
−30
b
10
0
t 227.04 b1
27.148 b2
, 15
1
t 362.78 376600. b3
30.914 5.4347103
, 20
2
t 517.35 444530.
34.248 ,
5 . 22
3
Contoh 3
19
The absolute relative approximate error
aobtained is
a
x
100
06
.
392
19
.
392
06
.
392
Makav(t) b0 b1(t t0)b2(tt0)(t t1) b3(t t0)(tt1)(t t2) ) 20 )( 15 )( 10 ( 10 * 4347 . 5 ) 15 )( 10 ( 37660 . 0 ) 10 ( 148 . 27 04 . 227
3
t t t t t t
Pada t = 16
) 20 16 )( 15 16 )( 10 16 ( 10 * 4347 . 5 ) 15 16 )( 10 16 ( 37660 . 0 ) 10 16 ( 148 . 27 04 . 227 ) 16 (
3
v
Perbandingan Hasil
20
Pangkat
Polinomial:
1
2
3
v (t=16) m/s
393.69
392.19
392.06
Distance from Velocity Profile
Dr.Eng. Agus S. Muntohar
21
Find the distance covered by the rocket from t=11s to
t=16s ?
) 20 )( 15 )( 10 ( 10 * 4347 . 5 ) 15 )( 10 ( 37660 . 0 ) 10 ( 148 . 27 04 . 227 ) (3
t t t t t t t v 5 . 22 10 t
4.2541 21.265t 0.13204t2 0.0054347t3 10 t 22.5
So
16
11
11
16 s v t dt
s
( 4.2541 21.265t 0.13204t2 0.0054347t3)dt
16 11
16 11 4 3 2 4 0054347 . 0 3 13204 . 0 2 265 . 21 2541 . 4 Acceleration from Velocity Profile
22
Find the acceleration of the rocket at t=16s given that
3 2
0054347
.
0
13204
.
0
265
.
21
2541
.
4
)
(
t
t
t
t
v
2 3
0054347
.
0
13204
.
0
265
.
21
2541
.
4
)
(
)
(
t
t
t
dt
d
t
v
dt
d
t
a
21
.
265
0
.
26408
t
0
.
016304
t
22
)
16
(
016304
.
0
)
16
(
26408
.
0
265
.
21
)
16
(
a