Abstrak- Sungai merupakan salah satu sumber air untuk
memenuhi kebutuhan manusia. Pada umumnya terdapat pemukiman penduduk di daerah sekitar sungai. Sehingga Air sungai menjadi sumber air yang penting untuk memenuhi kebutuhan sehari-hari. Sedangkan Aktifitas manusia dalam bidang industry dan rumah tangga secara tidak langsung menghasilkan polutan yang mengakibatkan penurunan kualitas air. Oleh karena itu penting untuk mengestimasi polutan pada sungai. Salah satu metode yang dapat digunakan adalah metode elemen hingga dan Kalman Filter. Kalman Filter merupakan suatu metode estimasi variabel keadaan pada sistem dinamik linear diskrit yang meminimumkan kovarian
error estimasi. Metode elemen hingga adalah metode numerik
yang digunakan untuk menyelesaikan permasalahan teknik dan
problem matematis dari gejala phisis. Kombinasi antara Kalman Filter dan metode elemen hingga berguna untuk perhitungan
pada waktu dan spasial. Namun, dalam proses komputasi akan membutuhkan waktu yang lama. Untuk mengurangi waktu komputasi tersebut digunakan metode Reduksi Kalman Filter dengan pendekatan Elemen Hingga.
Kata Kunci— Sungai, Polutan Sungai, Estimasi, Kalman Filter,
Metode Elemen Hingga dan Persamaan Linear Air Dangkal
I. PENDAHULUAN
IR merupakan salah satu kebutuhan pokok manusia yang sangat penting. Air digunakan oleh manusia dalam kehidupan sehari-hari seperti mandi, mencuci, wudhu, memasak, pengairan dan kebutuhan lainnya.Kebutuhan air dalam kehidupan sehari-hari di lingkungan rumah tangga berbeda-beda. Semakin tinggi taraf kehidupan seseorang semakin meningkat pula kebutuhan manusia akan air. Jumlah penduduk dunia setiap hari bertambah, sehingga mengakibatkan jumlah kebutuhan air meningkat[1].
Sungai merupakan salah satu sumber air untuk memenuhi kebutuhan manusia.Pada umumnya terdapat pemukiman penduduk di daerah sungai bagian tengah dan hilir sehingga di daerah ini, air sungai menjadi sumber air yang penting untuk memenuhi kebutuhan sehari-hari. Namun, aktifitas manusia dibidang pertanian, industri dan kegiatan rumah tangga menyebabkan penurunan kualitas air[2]. Hal ini dikarenakan aktifitas manusia tersebut secara tidak langsung menghasilkan polutan yang dapat mencemari lingkungan.
Informasi mengenai pencemaran air sungai diperlukan setiap saat sehingga ketika terjadi suatu permasalahan dapat ditangani dengan segera. Berdasarkan Undang-Undang Nomor 7 tentang sumber daya air, pemerintah mewajibkan pada instansi yang terkait untuk melakukan pengawasan air sungai[3]. Namun, biaya pemantauan tidaklah sedikit sehingga pemantauan hanya dilakukan pada titik-titik sungai yang terbatas dan pada periode tertentu.Oleh karena itu dibutuhkan perhitungan numerik untuk melengkapi kekurangan tersebut.
Kalman Filter merupakan salah satu metode untuk mengestimasi variabel keadaan dari sistem dinamik linear yang berguna untuk mengestimasi nilai rata-rata sekuensial dan kovarian[4]. Metode elemen hingga adalah metode numerik yang digunakan untuk menyelesaikan permasalahan teknik dan problem matematis dari gejala phisis[5]. Kombinasi antara Kalman Filter dan metode elemen hingga berguna untuk perhitungan pada waktu dan arah spasial. Sehingga untuk melengkapi kekurangan dari hasil pemantauan digunakan metode Kalman Filter dan Elemen Hingga.
II. METODE PENELITIAN
A. Tahap Telaah
Dari permasalahan dan tujuan yang telah dirumuskan selanjutnya dilakukan studi literatur mengenai aliran sungai dan penyebaran polutan. Studi literatur dilakukan terhadap buku, jurnal-jurnal ilmiah, tugas akhir, dan artikel yang berkaitan dengan penyebaran polutan sungai.
B. Tahap Analisa Model Dan Kajian Metode
Pada tahap ini dilakukan analisa terhadap persamaan SWE dan persamaan adveksi-difusi. Selanjutnya dilakukan estimasi terhadap model tersebut. Selain itu dikaji metode-metode yang digunakan.
C. Tahap Diskritisasi Model
Model didiskritkan sehingga model yang berbentuk sistem dinamik linear dapat diubah menjadi dinamik diskrit. Diskritisasi spasial menggunakan metode elemen hingga.
Estimasi Konsentrasi Polutan Sungai Menggunakan
Metode Reduksi Kalman Filter dengan Pendekatan
Elemen Hingga
Muyasaroh, Kamiran, Erna Apriliani
Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam (FMIPA), Institut Teknologi
Sepuluh Nopember (ITS),Surabaya,Indonesia
Jl. Arief Rahman Hakim, Surabaya 60111
april@matematika.its.ac.id
Sedangkan diskritisasi waktu menggunakan metode Euler Eksplisit.
D. Tahap Analisa Dan Pembahasan
Pada tahap ini dilakukan simulasi dari model yang telah terbentuk. Selanjutnya dilakukan analisa dan pembahasan terhadap hasil simulasi tersebut.
E. Tahap Simpulan Dan Saran
Setelah dilakukan analisa dan pembahasan maka akan diambil suatu kesimpulan dan saran untuk pengembangan penelitian selanjutnya.
III. ANALISA DAN PEMBAHASAN
A. Persamaan Keadaan
Persamaan keadaan yang digunakan adalah persamaan air dangkal linear dan persamaan adveksi-difusi. Persamaan momentum dan kontinuitas dari persamaan air dangkal linear dapat ditulis sebagai berikut :
𝜕𝑢 𝜕𝑡+ 𝑔 𝜕(𝜂+𝐻) 𝜕𝑥 − 𝜇 � 𝜕�𝜕𝑢𝜕𝑥+𝜕𝑢𝜕𝑥� 𝜕𝑥 + 𝜕�𝜕𝑢𝜕𝑦+𝜕𝑣𝜕𝑥� 𝜕𝑦 � = 0 𝜕𝑣 𝜕𝑡+ 𝑔 𝜕(𝜂+𝐻) 𝜕𝑦 − 𝜇 � 𝜕�𝜕𝑣𝜕𝑥+𝜕𝑢𝜕𝑦� 𝜕𝑥 + 𝜕�𝜕𝑣𝜕𝑦+𝜕𝑣𝜕𝑦� 𝜕𝑦 � = 0 𝜕𝜂 𝜕𝑡+ (𝐻 + 𝜂) � 𝜕𝑢 𝜕𝑥+ 𝜕𝑣 𝜕𝑦� = 0
Dengan 𝑢 kecepatan arah sumbu 𝑥 , 𝑣 kecepatan arah sumbu 𝑦 , 𝜂 ketinggian air, 𝑔 percepatan gravitasi, 𝜇 viskositas eddy kinematic, ℎ ketinggian dasar, dan 𝐻 kedalaman air.
Persamaan adveksi-difusi dapat ditulis sebagai berikut : 𝜕𝑐 𝜕𝑡+ 𝑢 𝜕𝑐 𝜕𝑥+ 𝑣 𝜕𝑐 𝜕𝑦− 𝜅 𝜕2𝑐 𝜕𝑥2− 𝜅𝜕 2𝑐 𝜕𝑦2= 0
Dengan 𝑐 konsentrasi polutan dan 𝜅 koefisien difusi. Kondisi batas diberikan sebagai berikut :
𝑢 = 𝑢� pada Γ𝑢
𝑢𝑛= 𝑢𝑖𝑛𝑖= 𝑢�𝑛 pada Γ𝑛 𝜂 = 𝜂̂ pada Γ𝜂
𝑐 = 𝑐̂ pada Γ𝑐
𝑏 = 𝜅𝑐,𝑖𝑛𝑖= 𝑏� pada Γ𝑛 Dengan nilai awal : 𝑢 = 𝑢�(0) pada 𝑡 = 0 𝑣 = 𝑣�(0) pada 𝑡 = 0 B. Kalman Filter
Kalman Filter adalah salah satu metode yang digunakan untuk mengestimasi variabel keadaan dari sistem dinamik stokastik linear diskrit yang meminimumkan kovarian error estimasi. Bentuk persamaan sistemnya sebagai berikut :
𝑥𝑘 = 𝐴𝑘𝑥𝑘−1+ 𝐵𝑘𝑢𝑘−1+ 𝐺𝑘𝑤𝑘−1
Sedangkan persamaan pengukurannya didefinisikan sebagai : 𝑧𝑘 = 𝐻𝑘𝑥𝑘+ 𝑣𝑘
Dengan 𝑥𝑘 variabel keadaan waktu 𝑘 , 𝑧𝑘 adalah data pengukuran, 𝐻 adalah matrik yang berhubungan dengan data pengukuran 𝑧𝑘 dan variabel keadaan 𝑥𝑘, sedangkan 𝑤𝑘 dan 𝑣𝑘 adalah noise sistem dan noise pengukuran dengan rata-rata nol serta kovarian 𝒬 dan 𝑅.
Algoritma Kalman Filter untuk mengestimasi variabel keadaan adalah
i. Inisialisasi 𝑥�0= 𝑥̅0 𝑃0= 𝑃𝑥0 ii. Tahap prediksi
Estimasi tahap prediksi didefinisikan sebagai berikut : 𝑥�𝑘−= 𝐴𝑥�𝑘−1+ 𝐵𝑢𝑘−1
Sedangkan kovarian errornya adalah 𝑃𝑘−= 𝐴𝑘𝑃𝑘−1𝐴𝑘𝑇+ 𝐺𝑘𝒬𝑘𝐺𝑘𝑇 iii. Tahap koreksi
Kalman gain didefinisikan sebagai berikut : 𝐾𝑘= 𝑃𝑘−𝑇𝐻𝑘𝑇(𝐻𝑘𝑃𝑘−𝐻𝑘𝑇+ 𝑅𝑘)−1
Estimasi tahap koreksi adalah 𝑥�𝑘 = 𝑥�𝑘−+ 𝐾𝑘(𝑧𝑘−𝐻𝑘𝑥�𝑘−)
Kovarian error didefinisikan sebagai berikut : 𝑃𝑘 = [𝐼 − 𝐾𝑘𝐻𝑘]𝑃𝑘−
C. Penerapan Metode Elemen Hingga Dan Euler Eksplisit Persamaan (1)~(4) dikalikan dengan fungsi pembobot atau pemberat 𝑁𝛼 dan diintegralkan terhadap domain 𝑉. Sehingga didapatkan persamaan weighted residual sebagai berikut : ∫ 𝑁𝛼�𝜕𝑢𝜕𝑡+ 𝑔𝜕(𝜂+𝐻)𝜕𝑥 − 𝜇 �𝜕�𝜕𝑢𝜕𝑥+𝜕𝑢𝜕𝑥� 𝜕𝑥 + 𝜕�𝜕𝑢𝜕𝑦+𝜕𝑣𝜕𝑥� 𝜕𝑦 �� 𝑉 𝑑𝑉 = 0 ∫ 𝑁𝛼�𝜕𝑣𝜕𝑡+ 𝑔𝜕(𝜂+𝐻)𝜕𝑦 − 𝜇 �𝜕� 𝜕𝑣 𝜕𝑥+𝜕𝑢𝜕𝑦� 𝜕𝑥 + 𝜕�𝜕𝑣𝜕𝑦+𝜕𝑣𝜕𝑦� 𝜕𝑦 �� 𝑑𝑉 = 0 𝑉 ∫ 𝑁𝛼𝑉 𝜕𝜂𝜕𝑡𝑑𝑉 + ∫ 𝑁𝛼(𝐻 + 𝜂)𝑉 𝜕𝑢𝜕𝑥𝑑𝑉+ ∫ 𝑁𝛼(𝐻 +𝑉 𝜂)𝜕𝑣𝜕𝑦𝑑𝑉 = 0 ∫ 𝑁𝛼𝑉 𝜕𝑐𝜕𝑡𝑑𝑉 + ∫ 𝑁𝛼𝑢𝑉 𝜕𝑐𝜕𝑥𝑑𝑉 − ∫ 𝑁𝛼𝜅 �𝜕𝜕𝑥2𝑐2+ 𝜕2𝑐 𝜕𝑦2� 𝑑𝑉 𝑉 = 0
Fungsi pemberat merupakan fungsi interpolasi linear pada elemen segitiga. Sehingga diperoleh persamaan elemen hingga sebagai berikut :
𝐼𝛼𝛽𝑢̇𝛽+ 𝑁𝛼𝛽�𝜂𝛽+ 𝐻𝛽� + 𝑀𝛼𝛽𝑢𝛽+ 𝐿𝛼𝛽𝑣𝛽 = 0 𝐼𝛼𝛽𝑣̇𝛽+ 𝑁𝛼𝛽�𝜂𝛽+ 𝐻𝛽� + 𝑀𝛼𝛽𝑣𝛽+ 𝐿𝛼𝛽𝑢𝛽= 0 (1) (2) (3) (4) (5) (6) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (7)
𝐼𝛼𝛽𝜂̇𝛽+ 𝐾𝛼𝛽,𝑖𝛾�𝜂𝛾+ 𝐻𝛾�𝑢𝛽+ 𝐾𝛼𝛽,𝑗𝛾�𝜂𝛾+ 𝐻𝛾�𝑣𝛽= 0 𝐼𝛼𝛽𝑐̇𝛽+ 𝐾𝛼𝛽𝛾𝑢𝛽𝑐𝛽+𝐾𝛼𝛽𝛾𝑣𝛽𝑐𝛽+ 𝜅𝐷𝛼𝛽𝑐𝛽 = 0
Metode euler eksplisit diaplikasikan untuk diskritisasi waktu. Penurunan waktu diaproksimasikan dengan ekspansi taylor sebagai berikut :
𝑢̇ ≈∆𝑡1(𝑢𝑘+1− 𝑢𝑘) 𝑣̇ ≈∆𝑡1(𝑣𝑘+1− 𝑣𝑘) 𝜂̇ ≈∆𝑡1 (𝜂𝑘+1− 𝜂𝑘) 𝑐̇ ≈∆𝑡1(𝑐𝑘+1− 𝑐𝑘)
Dengan mengaplikasikan persamaan (21) pada persamaan (20) didapatkan persamaan (22). 𝐼̅𝛼𝛽𝑢𝛽𝑘+1= 𝐼̃𝛼𝛽𝑢𝛽𝑘− ∆𝑡𝑁𝛼𝛽�𝜂𝛽+ 𝐻𝛽�𝑘− ∆𝑡𝑀𝛼𝛽𝑢𝛽𝑘− ∆𝑡𝐿𝛼𝛽𝑣𝛽𝑘 𝐼̅𝛼𝛽𝑣𝛽𝑘+1= 𝐼̃𝛼𝛽𝑣𝛽𝑘− ∆𝑡𝑁𝛼𝛽�𝜂𝛽+ 𝐻𝛽�𝑘− ∆𝑡𝑀𝛼𝛽𝑣𝛽𝑘− ∆𝑡𝐿𝛼𝛽𝑢𝛽𝑘 𝐼̅𝛼𝛽𝜂𝛽𝑘+1 = 𝐼̃𝛼𝛽𝜂𝛽𝑘− ∆𝑡𝐾𝛼𝛽,𝑖𝛾�𝜂𝛾+ 𝐻𝛾�𝑢𝛽𝑘− ∆𝑡𝐾𝛼𝛽,𝑗𝛾�𝜂𝛾+ 𝐻𝛾�𝑣𝛽𝑘 𝐼̅𝛼𝛽𝑐𝛽𝑘+1= 𝐼̃𝛼𝛽𝑐𝛽𝑘− Δ𝑡(𝐾𝛼𝛽𝛾𝑢𝛽𝑐𝛽𝑘+𝐾𝛼𝛽𝛾𝑣𝛽𝑐𝛽𝑘) − Δ𝑡𝜅𝐷𝛼𝛽𝑐𝛽𝑘 Dengan :
𝐼
𝛼𝛽= ∫
𝑉 𝑁𝛼𝑁𝛽𝑑𝑉
𝑁
𝛼𝛽= ∫
𝑉 𝑁𝛼𝑁𝛽,𝑖𝑑𝑉
𝑀𝛼𝛽= ∫ 𝑁𝛼,𝑖𝑉 𝑁𝛽,𝑖𝑑𝑉 + ∫ 𝑁𝛼,𝑗𝑁𝑉 𝛽,𝑗𝑑𝑉 𝐿𝛼𝛽 = ∫ 𝑁𝑉 𝛼,𝑖𝑁𝛽,𝑗𝑑𝑉, 𝐷𝛼𝛽 = ∫ 𝑁𝛼,𝑘𝑉 𝑁𝛽,𝑘𝑑𝑉 𝐾𝛼𝛽,𝑖𝛾= ∫ 𝑁𝛼𝑁𝛾𝑉 𝑁𝛽,𝑖𝑑𝑉 𝐾𝛼𝛽𝛾 = ∫ 𝑁𝛼𝑉 𝑁𝛾𝑁𝛽𝑑𝑉Yang mana 𝐼̅𝛼𝛽 menunjukkan koefisien lonjakan dan 𝐼̃𝛼𝛽= 𝑒𝐼̅𝛼𝛽+ (1 − 𝑒)𝐼𝛼𝛽
dengan 𝑒 parameter lonjakan.
D. Reduksi Kalman Filter Elemen Hingga
Penggabungan persamaan (22) dalam bentuk matrik menghasilkan matrik transisi. Pada metode Kalman Filter standar, model sistem secara umum ditunjukkan oleh persamaan (7) dan (8). Untuk mengurangi proses komputasi, domain dibagi menjadi dua bagian yaitu domain utama dan
domain cabang. 𝑥𝑘 adalah variabel keadaan pada domain utama. Sedangkan 𝑦𝑘 adalah variabel keadaan pada domain cabang. Matrik transisi dibagi menjadi 4 bagian, secara umum dapat ditulis sebagai berikut :
�𝑥
𝑦
𝑘+1𝑘+1� = �
𝐴𝐴31 𝐴𝐴42� �𝑥
𝑘𝑦
𝑘� + �𝑈
𝑉
𝑘 𝑘� + �𝐺𝑤
𝑘0
�
{𝑥
𝑘+1} = [𝐴
1]{𝑥
𝑘} + {𝐶
𝑘} + [𝐺]{𝑤
𝑘}
Dengan 𝐶𝑘= 𝐴2𝑦𝑘+ 𝑈𝑘 dan 𝑦𝑘= 𝐴3𝑥𝑘−1+ 𝐴4𝑦𝑘−1+ 𝑉𝑘−1 E. Algoritma 1. 𝑃0, 𝑥�0 diberikan 2. 𝐾𝑘= 𝑃𝑘−𝑇𝐻𝑘𝑇(𝐻𝑘𝑃𝑘−𝐻𝑘𝑇+ 𝑅𝑘)−1 3. 𝑃𝑘 = [𝐼 − 𝐾𝑘𝐻𝑘]𝑃𝑘− 4. 𝑃𝑘−= 𝐴𝑘𝑃𝑘−1𝐴𝑘𝑇+ 𝐺𝑘𝒬𝑘𝐺𝑘𝑇 5. {𝑥𝑘+1} = [𝐴1]{𝑥𝑘} + {𝐶𝑘} 6. 𝐶𝑘 = 𝐴2𝑦𝑘+ 𝑈𝑘 7. 𝑦𝑘 = 𝐴3𝑥𝑘−1+ 𝐴4𝑦𝑘−1+ 𝑉𝑘−1 8. 𝑥�𝑘 = 𝑥�𝑘−+ 𝐾𝑘(𝑧𝑘−𝐻𝑘𝑥�𝑘−) F. Hasil SimulasiSetelah diterapkan metode Reduksi Kalman Filter dan elemen hingga maka didapat grafik dan nilai estimasi sebagai berikut :
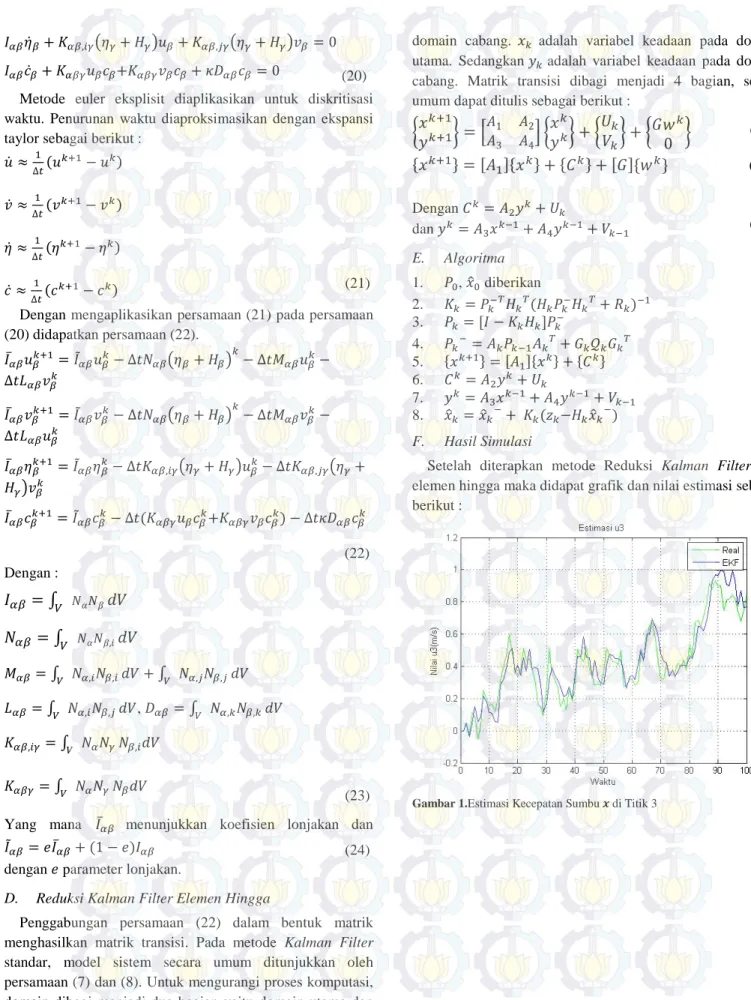
Gambar 1.Estimasi Kecepatan Sumbu 𝒙 di Titik 3
(20) (21) (22) (23) (24) (25) (26) (27)
Gambar 2. Estimasi Kecepatan Sumbu y di Titik 3
Gambar 3. Estimasi Ketinggian di Titik 3
Gambar 4. Estimasi Konsentrasi Polutan di Titik 3
Gambar 1~4 menunjukkan nilai real dan KF dari kecepatan, ketinggian, dan konsentrasi polutan di titik 3. Pada gambar dan tabel menunjukkan bahwa grafik dan nilai
kecepatan sumbu-𝑥 berangsur naik dengan nilai maksimum kecepatan 1 𝑚/𝑠 , kecepatan sumbu- 𝑦 mempunyai nilai maksimum 0.4 𝑚/𝑠, sedangkan ketinggian dan konsentrasi polutan mengalami penurunan dari nilai awal.
Gambar 5. Estimasi Kecepatan Sumbu 𝒙 di Titik 13
Gambar 6. Estimasi Kecepatan Sumbu 𝒚 di Titik 13
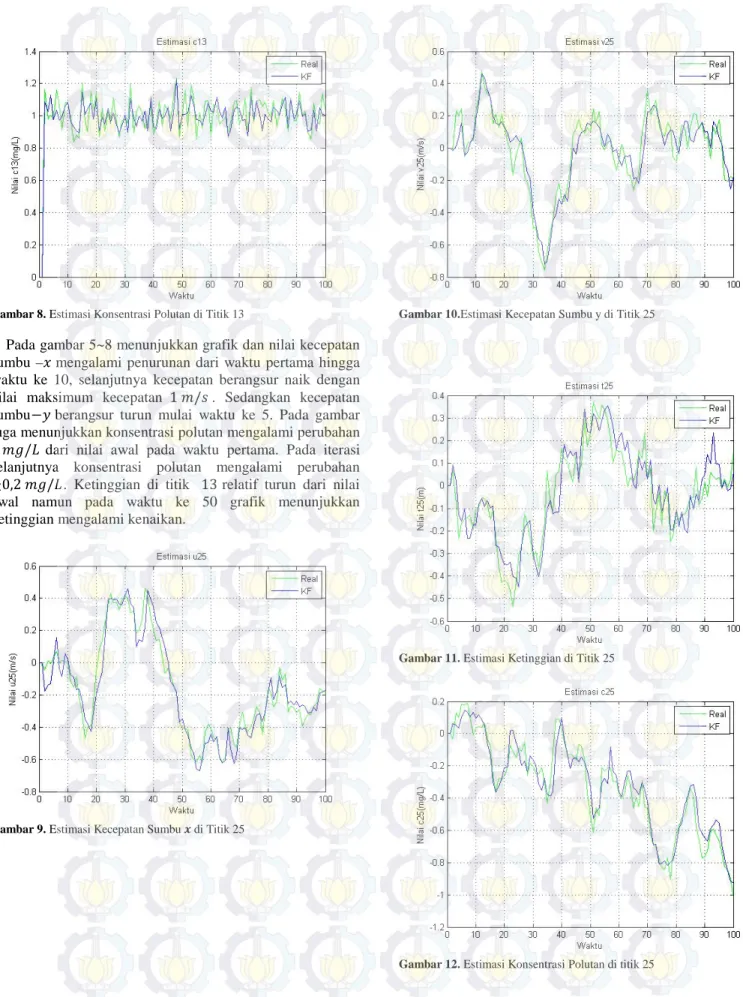
Gambar 8. Estimasi Konsentrasi Polutan di Titik 13
Pada gambar 5~8 menunjukkan grafik dan nilai kecepatan sumbu –𝑥 mengalami penurunan dari waktu pertama hingga waktu ke 10, selanjutnya kecepatan berangsur naik dengan nilai maksimum kecepatan 1 𝑚/𝑠 . Sedangkan kecepatan sumbu−𝑦 berangsur turun mulai waktu ke 5. Pada gambar juga menunjukkan konsentrasi polutan mengalami perubahan 1 𝑚𝑔/𝐿 dari nilai awal pada waktu pertama. Pada iterasi selanjutnya konsentrasi polutan mengalami perubahan ±0,2 𝑚𝑔/𝐿. Ketinggian di titik 13 relatif turun dari nilai awal namun pada waktu ke 50 grafik menunjukkan ketinggian mengalami kenaikan.
Gambar 9. Estimasi Kecepatan Sumbu 𝒙 di Titik 25
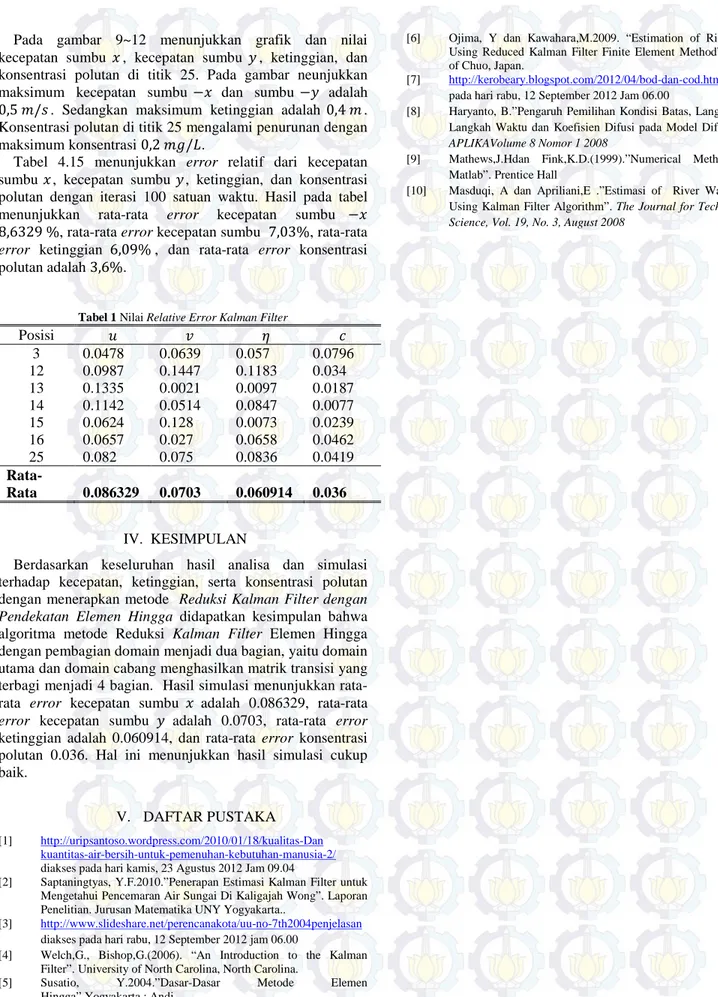
Gambar 10.Estimasi Kecepatan Sumbu y di Titik 25
Gambar 11. Estimasi Ketinggian di Titik 25
Pada gambar 9~12 menunjukkan grafik dan nilai kecepatan sumbu 𝑥 , kecepatan sumbu 𝑦 , ketinggian, dan konsentrasi polutan di titik 25. Pada gambar neunjukkan maksimum kecepatan sumbu −𝑥 dan sumbu −𝑦 adalah 0,5 𝑚/𝑠 . Sedangkan maksimum ketinggian adalah 0,4 𝑚 . Konsentrasi polutan di titik 25 mengalami penurunan dengan maksimum konsentrasi 0,2 𝑚𝑔/𝐿.
Tabel 4.15 menunjukkan error relatif dari kecepatan sumbu 𝑥, kecepatan sumbu 𝑦, ketinggian, dan konsentrasi polutan dengan iterasi 100 satuan waktu. Hasil pada tabel menunjukkan rata-rata error kecepatan sumbu −𝑥 8,6329 %, rata-rata error kecepatan sumbu 7,03%, rata-rata error ketinggian 6,09% , dan rata-rata error konsentrasi polutan adalah 3,6%.
Tabel 1 Nilai Relative Error Kalman Filter
Posisi 𝑢 𝑣 𝜂 𝑐 3 0.0478 0.0639 0.057 0.0796 12 0.0987 0.1447 0.1183 0.034 13 0.1335 0.0021 0.0097 0.0187 14 0.1142 0.0514 0.0847 0.0077 15 0.0624 0.128 0.0073 0.0239 16 0.0657 0.027 0.0658 0.0462 25 0.082 0.075 0.0836 0.0419 Rata-Rata 0.086329 0.0703 0.060914 0.036 IV. KESIMPULAN
Berdasarkan keseluruhan hasil analisa dan simulasi terhadap kecepatan, ketinggian, serta konsentrasi polutan dengan menerapkan metode Reduksi Kalman Filter dengan Pendekatan Elemen Hingga didapatkan kesimpulan bahwa algoritma metode Reduksi Kalman Filter Elemen Hingga dengan pembagian domain menjadi dua bagian, yaitu domain utama dan domain cabang menghasilkan matrik transisi yang terbagi menjadi 4 bagian. Hasil simulasi menunjukkan rata-rata error kecepatan sumbu 𝑥 adalah 0.086329, rata-rata error kecepatan sumbu 𝑦 adalah 0.0703, rata-rata error ketinggian adalah 0.060914, dan rata-rata error konsentrasi polutan 0.036. Hal ini menunjukkan hasil simulasi cukup baik.
V. DAFTAR PUSTAKA
[1] http://uripsantoso.wordpress.com/2010/01/18/kualitas-Dan kuantitas-air-bersih-untuk-pemenuhan-kebutuhan-manusia-2/
diakses pada hari kamis, 23 Agustus 2012 Jam 09.04
[2] Saptaningtyas, Y.F.2010.”Penerapan Estimasi Kalman Filter untuk Mengetahui Pencemaran Air Sungai Di Kaligajah Wong”. Laporan Penelitian. Jurusan Matematika UNY Yogyakarta..
[3] http://www.slideshare.net/perencanakota/uu-no-7th2004penjelasan
diakses pada hari rabu, 12 September 2012 jam 06.00
[4] Welch,G., Bishop,G.(2006). “An Introduction to the Kalman Filter”. University of North Carolina, North Carolina.
[5] Susatio, Y.2004.”Dasar-Dasar Metode Elemen Hingga”.Yogyakarta : Andi.
[6] Ojima, Y dan Kawahara,M.2009. “Estimation of River Current Using Reduced Kalman Filter Finite Element Method”.University of Chuo, Japan.
[7] http://kerobeary.blogspot.com/2012/04/bod-dan-cod.html diakses pada hari rabu, 12 September 2012 Jam 06.00
[8] Haryanto, B.”Pengaruh Pemilihan Kondisi Batas, Langkah Ruang, Langkah Waktu dan Koefisien Difusi pada Model Difusi”. Jurnal APLIKAVolume 8 Nomor 1 2008
[9] Mathews,J.Hdan Fink,K.D.(1999).”Numerical Methods Using Matlab”. Prentice Hall
[10] Masduqi, A dan Apriliani,E .”Estimasi of River Water Quality Using Kalman Filter Algorithm”. The Journal for Technology and Science, Vol. 19, No. 3, August 2008