BAB 2
TINJAUAN PUSTAKA
2.1. Sistem Distribusi
Jaringan transmisi dan jaringan distribusi pada sistem daya listrik berfungsi sebagai sarana untuk menyalurkan energi listrik yang dihasilkan dari pusat pembangkit ke pusat-pusat beban.
Sistem jaringan distribusi dapat dibedakan menjadi dua, yaitu sistem jaringan distribusi primer dan jaringan distribusi sekunder. Kedua sistem dibedakan berdasarkan tegangan kerjanya. Pada umumnya tegangan kerja pada sistem jaringan distribusi primer adalah 20 kV, sedangkan tegangan kerja pada sistem jaringan distribusi sekunder adalah 220/380 volt, seperti ditunjukkan pada Gambar 2.1 [11].
Gambar.2.l. Tipikal jaringan distribusi [11]
Untuk menyalurkan daya listrik yang dibutuhkan oleh konsumen (tegangan rendah 220/380 volt) dipasok dari gardu-gardu distribusi yang bersumber
Saluran Distribusi Primer 20 kV Saluran
Distribusi Sekunder 20 kV
dari jaringan primer (penyulang 20 kV) dan jaringan sekunder (gardu-gardu hubung 20 kV/380 volt).
Semua jaringan distribusi terdiri dari 4 (empat) tipe, yakni sebagai berikut: 1. Jaringan distribusi sistem radial
2. Jaringan distribusi sistem loop/ring 3. Jaringan distribusi sistem interkoneksi 4. Jaringan distribusi sistem spindle
2.2. Kualitas Daya
Operator sistem distribusi daya listrik berkomitmen untuk menjamin para pelanggannya untuk memperoleh tingkat keamanan sistem, keandalan sistem dan kualitas daya yang diterima dalam kondisi yang baik. Dengan meningkatnya beban-beban elektronik yang sensitif terhadap level tegangan yang diterimanya (misalnya; adjustable speed drive dan micro-processor), kualitas daya telah menjadi perhatian yang meningkat untuk fasilitas produsen, konsumen dan perusahaan listrik dua dekade terakhir ini [1,2].
Tujuan utama untuk menangani isu kualitas daya adalah tidak hanya untuk mengidentifikasi karakteristik gangguan dari peristiwa kualitas daya, tetapi juga untuk memberikan solusi yang sesuai untuk utilitas dan pengguna. Untuk mengatasi masalah kualitas daya, sumber dan penyebab yang berkaitan dengan gangguan listrik harus ditentukan berdasarkan teori sebelum diambil tindakan. Proses ini meliputi pemantauan gangguan daya, menganalisa karakteristiknya, dan menentukan solusi
untuk mengatasi masalah tersebut [12].
Ada berbagai jenis gangguan yang berpengaruh terhadap keandalan daya utilitas dan fasilitas, tetapi kedip tegangan adalah penyebab utama (80%) dari masalah kualitas daya. Kedip tegangan biasanya disebabkan oleh sumber gangguan, seperti beroperasinya motor-motor, dan atau transformator, gangguan hubung singkat pada saluran daya akibat induksi langsung sambaran petir dan sebagainya.
Dalam pasar global yang kompetitif saat ini, kualitas dari catu daya yang baik dan dapat diandalkan sangat penting untuk menghindari kerugian pada semua jenis industri. Hasil survey yang dilakukan di berbagai negara berguna bagi pelanggan untuk mengetahui tingkat kualitas daya agar meningkatkan imunitas peralatannya disamping untuk memberikan biaya yang effektif untuk produsen peralatan elektronik dan listrik yang kompatibel untuk lingkungan listrik.
Standard IEEE 519-1992 [13] dan IEEE 1159-1995 [13] mendeskripsikan tingkat kesesuaian peralatan terhadap koneksi jaringan. Tabel 2.1 menunjukkan karakteristik dari gangguan pada sistem daya.
Tabel 2.1. Karakteristik Gangguan Tegangan [14]
Jenis Gangguan Besaran Tegangan Lama Terjadi Gangguan
Sag (Kedip) 10 % – 90% 0.5 – 30 cycle
Swell 110 % – 180 % 0.5 – 30 cycle
Flicker 0 – 1% Steady state
Pemutusan < 10 % 0.5 cycle – 3 detik
Ketidakseimbangan 0.5 – 3% Steady state
Pada tahun 1970-an Assosiasi pembuat komputer (Computer Business Equipment Manufacturers Association = CBEMA) telah mengeluarkan suatu batasan kesensitifan peralatan proses industri terhadap besar kedip tegangan dan lamanya kedip tegangan yang terjadi, dimana peralatan tetap bekerja. Misalnya kedip tegangan terjadi dengan besar 0,1 % waktu kejadian berlangsung selama 0,5 siklus dan bila kedip tegangan yang terjadi 87% berlansung selama 30 siklus. Kurva CBEMA dapat dilihat pada Gambar 2.2a.
Gambar 2.2a Kurva CBEMA [14]
Pad tahun 1990-an kurva CBEMA ini disempurnakan dan digantikan oleh kurva yang dikeluarkan oleh Information Technology Industry Council (ITIC), seperti yang di tunjukkan Gambar 2.2b.
Gambar 2.2b Kurva ITIC [14] 2.3 Kedip Tegangan
Kedip tegangan atau sag voltage adalah penurunan nilai rms tegangan nominal sistem daya listrik yang tiba-tiba, sedangkan beban tetap terhubung ke sumber daya listrik. Kedip tegangan dapat menyebabkan kesalahan operasi atau kegagalan fasilitas pelanggan yang sangat sensitif terhadap perubahan besaran yang kecil [4,5,15,16]. Penurunan tegangan dalam saluran daya juga terjadi akibat pengoperasian beban yang berat, atau oleh gangguan pada saluran sistem transmissi maupun pada saluran sistem distribusi daya listrik, dapat mengubah karakteristik beban seperti motor induksi dan mesin las.
2.3.1 Standar dan karakteristik Kedip Tegangan
Menurut Standar IEEE 1159-1995, kedip tegangan didefinisikan sebagai penurunan nilai rms tegangan nominal sistem antara 0,1 pu sampai 0,9 pu, dengan
durasi 0,5 siklus sampai 1 menit, ditunjukkan pada Gambar 2.3 [7].
Gambar 2.3 Bentuk Gelombang Kedip Tegangan [7]
Kedip tegangan dapat dikarakteristikkan dalam parameter sebagai berikut [3]: 1. Besar kedip tegangan
2. Keseimbangan sistem tiga fasa 3. Lama (Durasi) kedip
4. Lompatan sudut fasa, karena perbedaan dalam rasio X/R antara sumber dan penyulang (feeder).
Kedip tegangan digabungkan dengan waktu membebaskan atau menghilangkan gangguan (clearing) menunjukkan karakteristik yang berbeda, dan mungkin memprediksi besaran untuk gangguan individu dengan menghitung penurunan tegangan pada beban sensitif. Masalah kedip tegangan dapat dikarakteristikkan melalui dua komponennya, yaitu besar (magnitude) dan lama (durasi), namun sudut fasanya dimasukkan ke dalam perhitungan dalam rangka mengidentifikasi fenomena untuk menemukan solusinya.
2.3.2 Penyebab Kedip Tegangan
Kedip tegangan dapat terjadi akibat adanya gangguan pada saluran sistem transmisi atau sistem distribusi sistem daya atau dapat juga diakibatkan oleh switching pada beban dengan daya yang cukup besar yang berakibat terjadinya inrush current, seperti pada motor, transformator dan sumber daya DC yang cukup besar. Karakteristik kedip tegangan durasi pendek akibat gangguan hubung singkat pada sistem daya diantara penyebab utamanya. Ada beberapa faktor yang mempengaruhi karakteristik kedip tegangan, yaitu [3]:
a. Jenis gangguan
Jenis gangguan merupakan faktor utama yang mempengaruhi karakteristik kedip tegangan. Besar dan sudut fasa tergantung pada jenis gangguan yang terjadi.
b. Lokasi terjadinya gangguan
Sebagaimana halnya dengan jenis gangguan, lokasi terjadinya gangguan mempunyai dampak yang cukup besar pada besar tegangan. Beban-beban sensitif pada level distribusi akan dapat merasakan gangguan yang terjadi meskipun gangguan tersebut terjadi dalam jarak yang cukup jauh pada sistem distribusi.
c. Ratio X/R pada jaringan
Dengan mengganti ratio X/R pada jaringan, maka akan mengganti ratio X/R pada sumber gangguan, karena impedansi sumber akan mempengaruhi besaran kedip tegangan.
2.3.3 Pengaruh Kedip Tegangan Terhadap Beban Sensitif.
Pada industri biasanya dihubungkan dengan jaringan distribusi sekunder 380 Volt, beban dapat dikategorikan terhadap jenis dan hubungan terhadap sistem daya, seperti pada Gambar 2.4 berikut :
Gambar 2.4 Tipikal Beban Satu Fasa dan Beban Tiga Fasa [5]
Kesensitifan peralatan terhadap kedip tegangan sangat tergantung pada jenis beban, setting pengaturan dan aplikasi. Karakteristik kedip tegangan yang paling berpengaruh pada peralatan-peralatan sensitif tersebut adalah waktu dan besar kedip tegangan, meskipun untuk beberapa peralatan, karakteristik seperti pergeseran fasa dan ketidakseimbangan juga mempengaruhi pada saat terjadi kedip tegangan.
Secara umum kesensitifan peralatan terhadap kedip tegangan dapat dibagi menjadi 3 kategori yaitu:
Beban tiga fasa
Beban tiga fasa
a. Peralatan yang sensitif hanya terhadap besaran kedip tegangan.
Peralatan yang termasuk kategori ini seperti relay undervoltage, peralatan kendali proses, pengaturan motor dan mesin-mesin otomatis.
b. Peralatan yang peka terhadap besaran dan lama kedip tegangan.
Peralatan yang termasuk pada kategori ini adalah peralatan-peralatan yang menggunakan komponen elektronika daya.
c. Peralatan yang peka terhadap karakteristik lain
Beberapa peralatan dapat dipengaruhi oleh karakteristik kedip tegangan selain daripada besar dan lama terjadinya kedip tegangan, seperti ketidakseimbangan fasa selama terjadinya kedip tegangan dan osilasi transient akibat gangguan hubung singkat tidak seimbang.
Pada kurva CBEMA dan ITIC (Gambar 2.5), ditunjukkan perangkat Adjustable Speed Drive (ASD) merupakan beban yang sangat peka terhadap kedip tegangan. ASD tersebut akan trip apabila terjadi kedip tegangan dibawah 0,9 pu selama 4 siklus dan kurva kontaktor akan mengalami trip apabila terjadi kedip tegangan di bawah 0,5 pu dengan lama lebih dari 1 siklus.
Gambar 2.5 Kurva Tingkat Kepekaan Peralatan Terhadap Kedip Tegangan [1]
2.3.4 Menentukan Besar Kedip Tegangan
Untuk menghitung besar kedip tegangan pada sistem radial, pembagi tegangan ditunjukkan model pada Gambar 2.6.
Gambar 2.6. Model pembagi tegangan [3]
Vs
Beban Sensitif yang dilindungi
+ Ea Eb Ec -+ -+ a b c Ia = In Zn Ia Ib Ic
Pada Gambar 2.6 Zs adalah impedansi sumber dan ZF
𝑉𝑠𝑎𝑔 = 𝑍𝑍𝐹
𝐹+ 𝑍𝑆 V
adalah impedansi diantara PCC dengan lokasi terjadinya gangguan. Point of common coupling (PCC) adalah titik dimana gangguan dan beban yang dicatu. Pada model tersebut, tegangan pada PCC dirumuskan oleh Persamaan (2.1) [11]:
S
dengan anggapan tegangan sebelum terjadi gangguan adalah 1 pu. Dari persamaan tersebut dapat dilihat apabila jarak terjadinya gangguan semakin dekat terhadap PCC, maka Z
…………...……… (2.1)
F
2.4. Gangguan Hubung Singkat Satu Fasa ke Tanah
akan semakin kecil yang mengakibatkan kedip tegangan semakin kecil, atau dapat saja terjadi apabila impedansi sistem mempunyai nilai yang cukup besar.
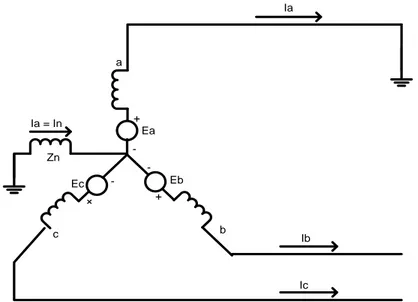
Diagram rangkaian untuk gangguan tunggal dari fasa ke tanah pada generator yang terhubung Y dengan netralnya ditanahkan melalui reaktansi ditunjukkan pada Gambar 2.7. berikut ini :
Pada Gambar 2.7 diperlihatkan fasa a adalah posisi terjadinya gangguan fasa ke tanah. Persamaan akan dikembangkan pada keadaan gangguan sebagai berikut :
𝐼𝑏 = 0; 𝐼𝑐 = 0; 𝑉𝑎 = 0
Dengan 𝐼𝑏 = 0 𝑑𝑎𝑛 𝐼𝑐 = 0 komponen simetris akan diberikan oleh Persamaan (2.2)
�𝐼𝐼𝑎0𝑎1 𝐼𝑎2 � = 13 �1 11 𝑎 𝑎12 1 𝑎2 𝑎� � 𝐼𝑎 0 0� ……….………..(2.2)
Sehingga 𝐼𝑎0, 𝐼𝑎1 𝑑𝑎𝑛 𝐼𝑎2 masing-masing akan sama dengan 𝐼𝑎� dan akan diperoleh 3
bahwa Ia1 = Ia2 = Ia0, �𝑉𝑉𝑎0𝑎1 𝑉𝑎2 � = �𝐸0𝑎 0� − � 𝑍0 0 0 0 𝑍1 0 0 0 𝑍2 � �𝐼𝐼𝑎0𝑎1 𝐼𝑎2 � ……….………(2.3) dan dengan menggantikan 𝐼𝑎0, 𝐼𝑎1 𝑑𝑎𝑛 𝐼𝑎2 pada Persamaan (2.3)
Maka akan diperoleh Persamaan (2.16):
�𝑉𝑉𝑎0𝑎1 𝑉𝑎2 � = �𝐸0𝑎 0� − � 𝑍0 0 0 0 𝑍1 0 0 0 𝑍2 � �𝐼𝐼𝑎1𝑎1 𝐼𝑎1 �……….(2.4)
Dengan mengerjakan perkalian dan pengurangan matriks dihasilkan suatu kesamaan matriks dan akan diperoleh suatu Persamaan (2.5) :
𝑉𝑎0+ 𝑉𝑎1+ 𝑉𝑎2 = − 𝐼𝑎1𝑍0+ 𝐸𝑎− 𝐼𝑎1𝑍1− 𝐼𝑎1𝑍2……….(2.5)
V = 0 p.u. V = 1 p.u. V = Vsag V = Vsag Xs A B C sebagai berikut : 𝐼𝑎1 = 𝑍1+ 𝑍𝐸𝑎2+𝑍0...(2.6)
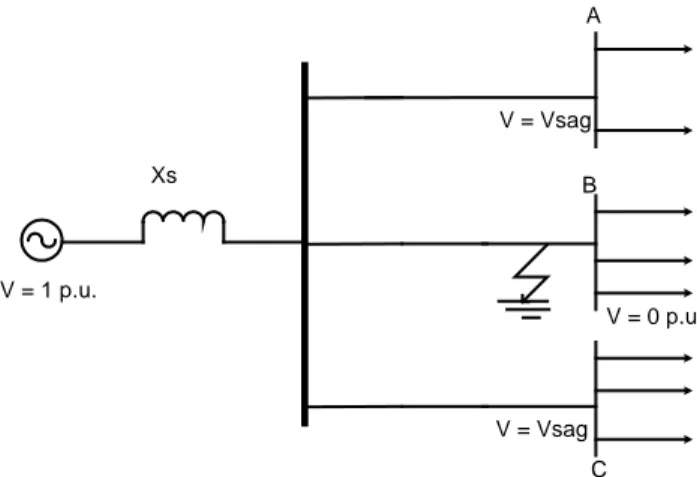
Dari Persamaan dapat disimpulkan bahwa apabila terjadi gangguan pada salah satu fasa, maka akan berakibat pada fasa yang lain. Seperti pada Gambar 2.8 berikut ditunjukkan bahwa apabila pada fasa B terjadi gangguan fasa ke tanah, maka pada fasa A dan fasa C akan terjadi kedip tegangan.
Gambar 2.8. Jaringan yang mengalami gangguan
2.5. Dynamic Voltage Restorer (DVR)
Peralatan-peralatan listrik berteknologi tinggi yang digunakan dalam industri terus meningkat dalam upaya mendukung peningkatan kualitas dan jumlah produksinya. Seiring dengan upaya tersebut, pihak konsumen makin membutuhkan dan menuntut tersedianya kualitas daya listrik yang kontinu dari pihak pemasok daya listrik atau agar tidak seringnya terjadi gangguan pada sistem tenaga listrik dan kalaupun terjadi gangguan harus dapat diatasi secepatnya. Kualitas pasokan daya
listrik ditentukan oleh magnitude, bentuk gelombang dan frekuensi tegangan. Salah satu jenis gangguan yang berpengaruh terhadap kualitas pasokan daya listrik adalah kedip tegangan. Kedip tegangan adalah drop tegangan dalam waktu singkat yang disebabkan oleh gangguan dalam sistem pasokan dan starting beban-beban besar yang sangat berpengaruh terhadap kontinuitas operasional industri karena dapat merusak peralatan-peralatan listrik yang sensitif terhadap perubahan tegangan [4],[6], [7].
Karakteristik kedip tegangan dapat ditentukan berdasarkan interval penurunan nilai rms tegangan dalam per-unit dan durasi waktunya saat terjadi penurunan tegangan hingga tegangannya kembali normal yaitu sebesar 0,1 sampai 0,9 pu dan selama 0,5 cycle sampai 1 menit.
Upaya untuk mengatasi gangguan kedip tegangan dapat dilakukan berda- sarkan penyebabnya. Apabila kedip tegangan berasal dari sistem pasokan maka pihak pemasok tenaga listrik melakukan perbaikan dengan jalan mengelompokkan beban-beban yang sensitif dan mengupayakan perbaikan pada sistem sirkuit agar daya yang disalurkan ke konsumen sesuai dengan standar kualitas yang dikehendaki atau dapat juga dengan mendisain inverter untuk peralatan proses yang lebih tahan terhadap fluktuasi tegangan atau memasang peralatan untuk memperbaiki kedip tegangan tersebut. Jika kedip tegangan berasal dari sisi beban (konsumen) maka perbaikan dilakukan dengan cara memanfaatkan teknologi elektronika daya sebagai kompensasi daya, salah satunya menggunakan Dynamic Voltage Restorer (DVR).
Dynamic Voltage Restorer merupakan peralatan yang digunakan untuk memulihkan tegangan atau memperbaiki mutu tegangan di sisi beban dan posisinya dipasang secara seri antara sumber dan beban. DVR dirangkai secara seri dengan sistem distribusi untuk melindungi peralatan sensitif terhadap terjadinya kedip tegangan [6,7].
Penghematan energi yang digunakan oleh DVR untuk memulihkan tegangan menjadi salah satu pertimbangan utama dalam menentukan jenis metode kompensasi yang digunakan. Oleh karena itu daya suntik minimum menjadi salah satu solusi yang bertujuan mengurangi kapasitas batere.
2.5.1. Struktur Dasar Dynamic Voltage Restorer
Fungsi dasar DVR adalah mendeteksi terjadinya kedip tegangan yang terjadi pada saluran sistem daya, kemudian menyuntikkan tegangan untuk mengkompensasi kedip tegangan yang terjadi. Oleh karena itu DVR ditempatkan dekat dengan beban sensitif yang dilindungi.
DVR mempunyai power circuit dan control circuit [17],[18]. Control circuit atau rangkaian kendali berfungsi untuk mengatur parameter-parameter dari sinyal kendali yang harus disuntikkan oleh DVR pada sistem antara lain : besar tegangan, frekuensi, pergeseran fasa dan lain-lain. Berdasarkan sinyal kendali yang diperoleh dari control circuit maka dihasilkan tegangan yang akan disuntikkan pada power circuit.
DVR bekerja tergantung dari tipe gangguan atau suatu kejadian yang terjadi di dalam sistem, menghasilkan tegangan yang akan disuntikkan yang diperoleh dari unit
penyimpan energi DC dan kemudian dirubah menjadi tegangan AC oleh Voltage Source Inverter (VSI). Pada kebanyakan waktu kerja DVR melakukan “nothing to do” yang berarti DVR tidak menyuntikkan suatu tegangan apapun kecuali hanya memonitoring tegangan bus.
DVR dirangkai seri dengan sistem distribusi. DVR umumnya mempunyai unit penyimpan energi capacitor DC, inverter VSI, filter low pass dan transformator penyuntik tegangan.
Pada Gambar 2.9 berikut ini ditunjukkan komponen-komponen dasar DVR:
Gambar 2.9. Struktur Dasar Sistem DVR[19] Fungsi masing-masing komponen DVR adalah sebagai berikut:
a. Unit Penyimpanan Energi DC
Unit penyimpan energi dc berfungsi untuk menyediakan kebutuhan daya aktif selama terjadi kompensasi oleh DVR. Perangkat penyimpan energi DC adalah kapasitor DC, baterai, penyimpan magnetik super dan flywheels. Rating kapasitor DC akan dipilih dengan mempertimbangkan kedip tegangan tanpa pergeseran sudut fasa.
Ukuran kapasitor harus dipilih sedemikian rupa, sehingga selama kedip diharapkan magnitude maksimum dan durasi, tegangan beban dijaga pada nilai ratingnya dan tegangan DC tidak berkurang dibawah nilai minimum yang dipilih.
Besar energi yang tersimpan dalam kapasitor, dihitung dengan memakai Persamaan (2.7) dan (2.8) dibawah ini:
Estorage = ½ CDCV2DC ... P (2.7) series = (1- Vpcc /Vrs) Pload ... Dimana: V (2.8) DC V
= tegangan kapasitor DC link
rs
V
= rating tegangan pasokan
pcc
C
= tegangan fasa selama kedip
DC
P
= kapasitansi kapasitor DC link
series
P
= daya suntik tiga fasa
load
b. Voltage Source Inverter (VSI)
= daya beban tiga fasa
Voltage Source Inverter (VSI) atau sederhananya inverter, adalah sistem perangkat elektronika daya yang dan sekaligus membangkitkan tegangan kompensasi yang akan disuntikkan DVR kedalam sistem untuk mengurangi kedip tegangan yang terjadi dalam bentuk sinusoidal (AC) dengan besar, frekuensi dan sudut fasa yang diinginkan, dari unit penyimpan energi DC. DVR menggunakan tiga unit inverter
satu fasa yang dibangun dari jembatan penuh Insulated Gate Bipolar Transistor (IGBT) satu fasa dan dimodulasi dengan metode Sinusoidal Pulse Width Modulation (SPWM) yang dipakai sebagai strategi switching VSI. SPWM merupakan teknik penyulutan gate switch IGBT pada inverter yang digunakan untuk mengendalikan indeks modulasi, oleh sebab itu akan mengendalikan tegangan keluaran inverter.
Dalam generator SPWM, sinyal referensi sinusoidal yang frekuensinya sama dengan frekuensi tegangan sumber (50 Hz) akan dibandingkan dengan sinyal pembawa segitiga yang frekuensinya lebih tinggi. Bila besar (magnitude) sinyal referensi sinusoidal lebih besar dari sinyal pembawa segitiga maka swicth S3 dan S4
akan ditrigger dan pada setengah siklus yang lain switch S1 dan S2 ditrigger.
Gambar 2.10. Rangkaian ekivalen inverter satu fasa [14]
Dalam tipe inverter SPWM ini, lebar pulsa divariasikan mengikuti pola gelombang sinusoidal dan harmonik orde rendah dieliminasi. Inverter SPWM mempunyai kecepatan switching yang cepat dan operasi yang kuat. Inverter SPWM akan mengendalikan indeks modulasi, oleh sebab itu akan mengendalikan tegangan keluaran inverter.
Prinsip kerja pembangkitan sinyal keluaran SPWM satu fasa adalah mengatur lebar pulsa mengikuti pola gelombang sinusoidal. Frekuensi sinyal referensi menentukan frekuensi keluaran inverter. Untuk mengetahui rasio modulasi frekuensi dari pembangkitan SPWM dapat dihitung dengan Persamaan:
Mf
Dimana : 𝑓𝑟𝑒𝑓 = frekuensi sinyal referensi sinusoidal = 𝑓𝑐𝑎𝑟
𝑓𝑟𝑒𝑓
𝑓𝑐𝑎𝑟 = frekuensi sinyal pembawa segitiga
Dan besar tegangan keluaran inverter SPWM adalah ∶
... (2.9) Gelombang Sinyal
Pembawa Segitiga Referensi Sinusoidal
Gambar 2.11 Pembangkitan tegangan keluaran sinusoidal inverter SPWM satu fasa [19]
Besar sinyal referensi sinusoidal menentukan indeks modulasi sinyal genarator PWM yang tergantung kepada sinyal error. Besar sinyal referensi sinusoidal dikendalikan oleh pengendali logika fuzzy didasarkan kendali umpan balik
yang menyetel besar sesuai dengan besar sinyal error dan sebab itu mengenda likan indeks modulasi.
Bentuk tegangan keluaran inverter SPWM satu fasa ditunjukkan pada Gambar 2.12 berikut.
Gambar 2.12 Bentuk tegangan keluaran inverter SPWM satu fasa [19] c. Inverter SPWM tiga fasa
DVR dapat juga menggunakan satu unit inverter tiga fasa yang dibangun dari jembatan penuh IGBT tiga fasa dan dimodulasi SPWM untuk melindungi beban sensitif terhadap kedip tegangan sebagai akibat gangguan hubung singkat, seperti ditunjukkan Gambar 2.13 berikut.
Gambar 2.13 Rangkaian inverter tiga fasa [20]
AC tiga fasa pada terminal keluaran inverter. Switching inverter dapat dilakukan pada konduksi 120o atau 180o. Konduksi 180o
Pada konduksi 180
mempunyai penggunaan switch yang lebih baik dan metode ini yang diusulkan pada penelitian ini.
o
terdapat enam mode operasi per-siklus dengan durasi setiap mode adalah 60o yang diidentifikasi dengan urutan switching 123, 234, 345, 456, 561 dan 612 [20]. Pada Gambar 2.14 dan 2.15 ditunjukkan mode konduksi 180o dan bentuk gelombang keluaran inverter pada mode konduksi 180o.
Gambar 2.15 Bentuk gelombang keluaran inverter pada konduksi 180o [20]
d. Unit Filter Pasif Low Pass
Fiter low pass terdiri dari induktor dan kapasitor, yang dapat diletakkan pada sisi tegangan rendah transformator penyuntik atau pada sisi tegangan tinggi transformator penyuntik tegangan. Dengan menempatkan filter pada sisi inverter atau sisi tegangan rendah transformator penyuntik, harmonisa yang terjadi dan yang bersumber dari VSI dapat dicegah masuk kedalam transformator penyuntik.
e. Unit Transformator Penyuntik Tegangan
Fungsi dasarnya adalah untuk menaikkan pasokan tegangan AC yang dihasilkan oleh VSI menjadi tegangan yang dibutuhkan beban. Kedalaman kedip tegangan maksimum yang dapat dikompensasi menjadi suatu batasan untuk menentukan rating inverter dan transformator penyuntik.
Apabila arus pada jaringan lebih besar dari arus pada DVR, maka suatu switch by pass akan aktif untuk mencegah arus dengan nilai yang lebih besar mengalir melalui DVR. Switch by pass diletakkan diantara inverter dengan transformator penyuntik tegangan seperti pada Gambar 2.16
Gambar 2.16. Switch by pass pada DVR [21] Suatu DVR dapat bekerja pada beberapa kondisi yaitu :
a. Keadaan Normal.
Apabila unit penyimpanan energi DC terisi penuh, DVR akan bekerja pada keadaan stand by. Pada kondisi stand by DVR tidak menyuntikkan tegangan pada jaringan.
b. Keadaan terjadi kedip tegangan.
DVR akan memasok daya aktif dari penyimpan energi, dan daya reaktif yang dibutuhkan untuk kompensasi tegangan.
c. Keadaan terjadi gangguan pada saluran distribusi.
mengalir pada rangkaian DVR, akibatnya dapat merusak komponen-komponen DVR yang peka. Untuk melindungi peralatan yang sensitif tersebut dipasang switch by pass pada DVR.
2.4.2. Metode Kompensasi Kedip Tegangan pada DVR
Suatu DVR umumnya diletakkan pada level distribusi, dengan prinsip utama menyuntikkan tegangan secara seri dengan sumber tegangan pada saat gangguan terdeteksi pada sistem daya. Beban sensitif yang akan dilindungi terhadap kedip tegangan yang terjadi akibat gangguan hubung singkat pada jaringan sistem tenaga, akan dihubungkan dengan DVR [19, 20].
Teknik kendali kompensasi pada suatu DVR adalah mekanisme yang digunakan untuk memonitor kondisi tegangan yang mengalir pada sistem distribusi. Apabila terjadi kedip tegangan pada saluran distribusi, tegangan pada beban tetap dipertahankan sama dengan tegangan sebelum terjadi kedip tegangan. Pada umumnya kedip tegangan berhubungan dengan pergeseran fasa disertai dengan perubahan besar tegangan. Oleh karena itu teknik kendali yang digunakan harus dapat mengkompensasi perubahan besar tegangan, pergeseran fasa dan bentuk gelombang, tetapi tergantung terhadap koneksi beban yang dihubungkan dengan saluran distribusi tersebut. Pada dasarnya jenis beban sangat mempengaruhi strategi kompensasi yang dipakai. Sebagai contoh, pada beban linier hanya dibutuhkan kompensasi besar tegangan, karena beban linier tidak sensitif terhadap pergeseran fasa.
Rangkaian pada sistem daya sederhana yang menggunakan DVR ditunjukkan pada Gambar 2.17
Gambar 2.17 Sistem Daya Dengan DVR [21]
Pada keadaan normal, tegangan sumber (Vs) diidentifikasi sebagai tegangan pre-sag (Vpre-sag). Pada saat DVR tidak menyuntikkan tegangan pada sistem, maka
tegangan beban Vload akan sama dengan VS. Pada saat terjadi kedip tegangan, besar
dan sudut fasa sumber tegangan dapat mengalami perubahan (Vsag). Pada kondisi
tersebut, maka DVR akan bekerja dengan menyuntikkan tegangan sebesar VDVR.
Apabila kedip tegangan yang terjadi telah dikompensasi, maka tegangan selama terjadi kedip akan sama dengan tegangan sebelum terjadi kedip (Vsag = Vpresag
a. Kompensasi Pre-Sag
). Kompensasi dilakukan dengan menyuntikkan daya aktif dan daya reaktif. Tergantung tingkat kompensasi yang dibutuhkan oleh beban, terdapat tiga jenis metode kompensasi yaitu : kompensasi pre-sag, kompensasi in-phase dan teknik optimasi energi [18].
Strategi kompensasi ini direkomendasikan pada beban-beban non linier yang sensitif, membutuhkan kompensasi terhadap besaran tegangan dan sudut fasa tegangan. Pada teknik kompensasi ini, DVR akan mencatu perbedaan yang terjadi antara Vpre sag dan Vsag, sehingga akan mengembalikan semua nilai besaran dan sudut
fasa kepada nilai sebelum terjadi kedip tegangan, seperti yang ditunjukkan pada Gambar 2.18
Gambar 2.18 Teknik kompensasi Pre-Sag [21]
Dimana : VDVR =
V
tegangan yang disuntikkan DVR
Sag
V
= besar kedip tegangan
pre-sag = tegangan beban sebelum gangguan = 1 pu Iload
δ = δ
= arus beban
L = sudut antara arus beban IL dengan tegangan beban VL
δ
S = sudut antara arus beban IL dengan kedip tegangan V
Pada kondisi normal, tegangan sistem (V
Sag
pre sag) akan sama dengan tegangan
beban (V Load) dimana keduanya mempunyai nilai sebesar 1 pu dengan sudut fasa
sebesar nol. Selama terjadi kedip tegangan, maka tegangan sistem akan berkurang dengan nilai yang lebih kecil dari nilai VS . Pengurangan nilai tegangan ini akan
tegangan dan akan menyuntikkan tegangan kompensasi VDVR
Pada Gambar 2.18 daya semu dari DVR adalah [22]:
untuk mengembalikan kembali nilai besar tegangan dan sudut fasa.
𝑆1𝐷𝑉𝑅 = 𝐼𝐿 . V1DVR
𝑆1𝐷𝑉𝑅 = 𝐼𝐿. �𝑉𝐿2+ 𝑉𝑆2− 2𝑉𝐿𝑉𝑆cos (𝛿𝐿− 𝛿𝑆) ...….... (2.11)
...………... (2.10)
dan daya aktif DVR adalah :
𝑃1𝐷𝑉𝑅 = 𝐼𝐿(𝑉𝐿cos 𝛿𝐿− 𝑉𝑆cos 𝛿𝑆 ) ....……...…... (2.12)
Besaran dari VDVR
𝑉1𝐷𝑉𝑅 = �𝑉𝐿2+ 𝑉𝑆2− 2𝑉𝐿𝑉𝑆cos (𝛿𝐿− 𝛿𝑆) ..…... (2.13)
dapat dihitung dengan persamaan :
dan sudut fasa pada VDVR
𝜃1𝐷𝑉𝑅 = 𝑎𝑟𝑐 tan𝑉𝑆𝑉cos 𝛿− 𝑉𝑆sin 𝛿 𝐿 ...……..……...…... (2.14)
adalah sebesar :
b. Teknik Kompensasi In-Phase
Pada metode kompensasi ini hanya besaran tegangan yang dikompensasi. Tegangan yang dikompensasi sefasa dengan kedip tegangan dan hanya besar tegangan yang dikompensasi. Oleh karena itu pada teknik kompensasi ini, tegangan yang disuntikkan DVR dapat diminimalkan. Teknik kompensasi ini sangat cocok untuk beban-beban linier karena tidak membutuhkan kompensasi terhadap sudut fasa. Lebih lanjut teknik kompensasi ini dapat dilihat seperti yang ditunjukkan pada Gambar 2.19.
Pada Gambar 2.19 tersebut, dapat dilihat bahwa tidak terdapat perbedaan fasa antara 𝑉𝑠𝑎𝑔 𝑑𝑒𝑛𝑔𝑎𝑛 𝑉𝑉𝐷𝑅. 𝑉𝑉𝐷𝑅 adalah tegangan yang disuntikkan untuk
mendapatkan nilai 𝑉𝑝𝑟𝑒 𝑠𝑎𝑔 sebesar 1 pu.
Gambar 2.19 Teknik kompensasi In-Phase [21] Daya semu dan daya aktif DVR adalah [22]
𝑆2𝐷𝑉𝑅 = 𝐼𝐿. 𝑉2𝐷𝑉𝑅 ...……... (2.15)
𝑃2𝐷𝑉𝑅 = 𝐼𝐿 𝑉𝐷𝑉𝑅cos 𝛿𝑠 = 𝐼𝐿 (𝑉𝐿− 𝑉𝑆 ) cos 𝛿𝑆 ....…... (2.16)
Besaran dan sudut fasa VDVR
𝑉2𝐷𝑉𝑅 = 𝑉𝐿− 𝑉𝑆…………...…..…... (2.17)
adalah
𝛿2𝐷𝑉𝑅 = 𝛿𝑆 ...…………... (2.18)
c. Teknik kompensasi Optimasi Energi
Pada teknik kompensasi optimasi energi ini pemakaian daya aktif diminimalkan atau dibuat sama dengan nol, dengan cara menyuntikkan tegangan yang dibutuhkan DVR dengan besar sudut fasa 90o terhadap arus beban. Metode ini dapat mengurangi konsumsi energi yang tersimpan pada DC link dengan cara menyuntikkan daya reaktif. Pengurangan konsumsi energi berarti kemampuan sistem untuk
menyuntikkan energi akan meningkat apabila kapasitas penyimpanan energi meningkat juga. Namun pada teknik ini tegangan yang disuntikkan akan lebih besar daripada teknik kompensasi in-phase. Oleh karena itu dibutuhkan transformator penyuntik dengan rating yang lebih tinggi.
Pada Gambar 2.20 dibawah ini dapat dilihat bahwa 𝑉𝐷𝑉𝑅 mempunyai sudut fasa 900 terhadap arus beban. Bila dianalisa maka 𝑉𝐷𝑉𝑅 dengan metode ini ternyata lebih besar jika dibandingkan dengan 𝑉𝐷𝑉𝑅 dengan metode lain.
Gambar 2.20 Teknik kompensasi optimasi energi [21]
Dari ketiga metode tersebut mempunyai tujuan utama supaya tegangan beban dikompensasi sama dengan tegangan nominal.
|𝑉𝑙𝑜𝑎𝑑| = 𝑘𝑜𝑛𝑠𝑡𝑎𝑛
Arus dan daya pada steady state yang diserap oleh beban tidak berubah, sehingga: |𝐼𝑙𝑜𝑎𝑑| = 𝑘𝑜𝑛𝑠𝑡𝑎𝑛
|𝑃𝑙𝑜𝑎𝑑| = 𝑘𝑜𝑛𝑠𝑡𝑎𝑛
|𝑄𝑙𝑜𝑎𝑑| = 𝑘𝑜𝑛𝑠𝑡𝑎𝑛
dan tegangan DVR (VDVR
Pada Gambar 2.21 ditunjukkan aliran daya aktif dan reaktif pada sistem, strategi pengendalian tergantung dari jenis beban dan respon beban terhadap perubahan tegangan. Beberapa beban sangat sensitif terhadap pergeseran fasa dan pergeseran fasa tersebut harus dihilangkan pada teknik pengendalian DVR.
) yang harus disuntikkan kepada sistem.
Gambar 2.21 Aliran daya aktif dan reaktif pada sistem dengan DVR [21]
2.5 Teknik Deteksi Kedip Tegangan Pada DVR
DVR menggunakan teknik tertentu untuk mendeteksi terjadinya kedip tegangan pada sistem untuk melindungi beban-beban sensitif terhadap kedip tegangan. Teknik deteksi berguna untuk memonitor sudut fasa dan magnitudo fasa selama kondisi normal kemudian mendeteksi terjadinya kedip tegangan dimana DVR akan mengetahui titik awal dan akhir terjadinya kedip tegangan dan juga mempunyai informasi kedalaman serta pergeseran fasa kedip tegangan tersebut [23,24,25,26,27].
Pada umumnya suatu DVR menggunakan Phase Locked Loop untuk mengetahui magnitudo tegangan, frekuensi dan sudut fasa dari tegangan normal
sistem, sehingga apabila terjadi perubahan dari keadaan yang normal maka akan dapat dideteksi. Phase Locked Loop (PLL) adalah suatu sistem kendali umpan balik tertutup (closed loop feedback control system), yang menghasilkan sinyal dengan frekuensi dan sudut fasa yang sama dengan sinyal input. PLL mempunyai oscillator yang berfungsi untuk menghasilkan sinyal keluaran.
Fungsi PLL tersebut dapat dikategorikan sebagai detektor fasa, variable oscillator dan jalur umpan balik. PLL merespon perubahan frekuensi dan perubahan sudut fasa dari sinyal masukan dengan cara menaikkan atau menurunkan frekuensi dari oscillator sehingga tercapai nilai seperti pada sinyal masukan.
Rangkaian sederhana PLL ditunjukkan pada Gambar 2.22 berikut. Sudut fasa sinyal input dibandingkan dengan keluaran umpan balik dari oscillator sehingga akan menghasilkan sinyal error. Keluaran dari detektor fasa mempunyai komponen harmonisa, sehingga perlu dilewatkan melalui suatu filter. Namun proses yang terjadi akibat mengatasi harmonisa tersebut akan menimbulkan transient delay dalam mengatasi kedip tegangan, dimana keadaan ini tidak diharapkan [23].
Tegangan keluaran dari Loop Filter kemudian dicatu pada Voltage Controlled Oscillator (VCO) dan akan menghasilkan output. Sinyal keluaran tersebut yang berada dalam bentuk informasi sudut fasa akan diumpan balik menuju phase detector. Keluaran dari oscillator kemudian dibandingkan dengan masukan dan apabila kedua frekuensi tersebut berbeda maka oscillator akan mengatur frekuensinya agar sesuai dengan frekuensi masukan.
Fungsi utama dari kontroller pada DVR adalah mendeteksi terjadinya kedip tegangan pada sistem. Untuk mengatur pengendali pada DVR tersebut digunakan transformasi dqo atau transformasi Park. Metode dqo tersebut akan memberikan informasi kedalaman kedip dan pergeseran fasa disertai titik awal dan titik akhir kedip tegangan tersebut. Pada Gambar 2.23 ditunjukkan flow chart teknik pengendalian DVR berdasarkan transformasi Park. Dimana proses transformasi dari sistem tiga fasa ke sistem dqo ditunjukkan pada persamaan berikut [28]:
�𝑉𝑉𝑑𝑞 𝑉𝑜 � = ⎣ ⎢ ⎢ ⎢ ⎡ cos (𝜃) cos �𝜃 − 2𝜋3� 1 − sin(𝜃) − sin �𝜃 − 2𝜋3� 1 1 2 1 2 1 2⎦ ⎥ ⎥ ⎥ ⎤ �𝑉𝑉𝑎𝑏 𝑉𝑐 � ... (2.19)
Teknik pendeteksian dibuat berdasarkan perbandingan tegangan referensi terhadap tegangan hasil pengukuran ( Va, Vb dan Vc). Metode dqo memberikan informasi kedalaman tegangan yang jatuh (d) dan pergeseran dari fasa tegangan (q).
Kedip tegangan akan terdeteksi apabila tegangan sumber jatuh dibawah 90% tegangan referensi. Sinyal error yang diakibatkan terdapatnya perbedaan antara tegangan hasil pengukuran dengan tegangan referensi digunakan sebagai sinyal modulasi untuk menghasilkan pola komutasi sebagai pemicu IGBT.
Gambar 2.23 Flow chart teknik pengendalian DVR berdasarkan transformasi [28]
Setelah informasi ini diperoleh, maka DVR selanjutnya akan menyuntikkan tegangan pada sistem untuk memulihkan kedip tegangan yang timbul [26,27,28,29] Pada penelitian ini DVR menggunakan pengendali logika fuzzy untuk mengetahui besar tegangan, frekuensi dan sudut fasa dari tegangan normal sistem, sehingga apabila terjadi perubahan dari keadaan normal tersebut, maka akan dapat dideteksi.
2.6. Sistem Kendali Logika Fuzzy DVR
Dalam pengendali logika fuzzy, kendali dasarnya ditentukan oleh seperangkat aturan linguistik yang ditentukan oleh sistem. Variabel-variabel numerik dirubah menjadi variabel-variabel linguistik, sehingga pemodelan matematik sistem tidak diperlukan. Pengendali logika fuzzy diusulkan untuk mengendalikan tindakan inverter. Pada setiap fasa, pengendali logika fuzzy mempunyai dua masukan waktu nyata yang diukur pada setiap sampel waktu, yang disebut kesalahan (error) dan tingkat kesalahan (rated error ) dan keluarannya disebut sinyal penggerak (signal actuating). Sinyal masukan difuzzikan (fuzzified) dan diwakili dalam notasi himpunan fuzzy (fuzzy set) sebagai fungsi keanggotaan. Didefinisikan aturan ‘ Jika ... Lalu ...’ menghasilkan sinyal keluaran penggerak (actuating) dan sinyal-sinyal ini di-defuzzified jadi sinyal kendali analog untuk dibandingkan dengan sinyal pembawa untuk mengendalikan inveter SPWM. Blok diagram sistem pengendali logika fuzzy pada DVR ditunjukkan pada Gambar 2.24.
- Parameter-parameter Masukan
Dua variabel error dan rate of change error, yaitu perbedaan tegangan antara tegangan pasokan dan tegangan referensi, dan laju perubahan tegangan error yang diambil sebagai masukan untuk pengendali logika fuzzy. Kesalahan (error) dan tingkat kesalahan (error rate) didefinisikan sebagai :
Kesalahan (error) = 𝑉𝑟𝑒𝑓 - 𝑉𝑆 ... (2.20) Tingkat kesalahan ( Error rate) = error(n) – error(n-1) ... (2.21) Aturan kendali dievaluasi melalui mekanisme keputusan.
- Fuzzification
Kesalahan dan tingkat kesalahan didefinisikan oleh variabel linguistik seperti ; negatif besar (NB), negatif sedang (NM), negatif kecil (NS), nol (Z), positif kecil (PS), positif sedang (PM) dan positif besar (PB), ditandai dengan fungsi keanggotaan segitiga. Fungsi-fungsi ini telah dipilih untuk memenuhi kebutuhan keluaran pengendali logika fuzzy. Keluaran juga ditentukan oleh tujuh variabel linguistik seperti negatif besar (NB), negatif sedang (NM), negatif kecil (NS), nol (Z), positif kecil (PS), positif sedang (PM), positif besar (PB) ditandai dengan fungsi keanggotaan yang ditunjukkan dalam Gambar 2.25.
Gambar 2.25. Fungsi keanggotaan untuk masukan dan keluaran [27]
- Pengambilan Keputusan
Proses fuzzy diwujudkan dengan metode Mamdani. Metode keputusan Mamdani digunakan karena dengan mudah mendapatkan hubungan antara masukan dan keluaran. Himpunan aturan untuk pengendali fuzzy diwakili dalam Tabel 2.3. Ada 49
aturan untuk pengendali fuzzy. Keluaran fungsi keanggotaan untuk setiap aturan yang diberikan oleh operator minimum (Min). Operator Max digunakan untuk mendapatkan keluaran gabungan fuzzy dari himpunan keluaran operator Min. Keluaran yang dihasilkan oleh himpunan fuzzy dan operasi logika fuzzy dengan mengevaluasi semua aturan.
Tabel 2.3 Himpunan aturan logika fuzzy
- Defuzzification
Defuzzification adalah proses mengubah keluaran pengendali di label linguistik yang diwakili oleh himpunan fuzzy kepada sinyal kendali nyata (analog). Metode yang digunakan untuk defuzzification penelitian ini adalah input ke metode centroid. Dengan menggunakan metode defuzzification yang paling umum digunakan, yaitu metode centroid. Defuzzified nilai-nilai kenaikan dalam masukan kendali diperoleh sebagai 𝐶∗ = (𝐶1∗ 𝐴1+𝐶2∗𝐴2)
𝐴1+𝐴2 , 𝑑𝑖𝑚𝑎𝑛𝑎; C1, A1 adalah centroid dan turunan area
Demikian pula, C2 dan A2 merupakan centroid dan area yang ditunjukkan pada Gambar 2.26.b.
Gambar 2.26 Teknik defuzzification memakai metode centroid [27].
- Pengolahan Sinyal
Keluaran dari proses pengendali logika fuzzy adalah sinyal kendali yang digunakan dalam pembangkitan sinyal switching inverter PWM dengan membandingkan terhadap sinyal pembawa.
2.6.1 Model Sistem Pengendalian
Dalam rangka mempelajari DVR dihubungkan secara seri dengan saluran, seperti dapat dilihat pada Gambar 2.27 berikut:
Gambar 2.27 Rangkaian ekivalent satu fasa [27]
Dalam hal ini, VSI dianggap sebagai sumber tegangan dengan amplitudo 𝐾𝑡 𝑉𝑐, dan 𝐿𝑡 adalah induktansi bocor transformator seri di sisi jaringan. Sumber
diwakili oleh sebuah sumber tegangan ideal yang memiliki amplitudo 𝐸𝑔 dan induktansi 𝐿𝑔. Tegangan yang tersedia sebelum DVR adalah 𝑉𝑔 dan beban dimodelkan sebagai tahanan seri 𝑅𝑙 dan sebuah induktansi 𝐿𝑙.
Dalam rangka untuk membuat sebuah sistem kendali efektif, pertama kali diperlukan model sistem yang memadai dan bisa dikendalikan. Untuk melakukan ini, hipotesis berikut telah dilakukan. Sebuah model dinamis pertama dianggap tanpa filter. VSC dimodelkan sebagai sumber tegangan ideal (tidak ada penundaan). Dari Gambar 2.27 diatas dapat dibuat Persamaan (2.22) dan (2.23):
𝐿 𝑑 𝑖1 𝑑𝑡 + 𝑅1𝑖1 (𝑡) = 𝑉𝑔(𝑡) + 𝐾𝑡𝑉𝑐 (t) ... (2.22) L = 𝐿𝑡+ 𝐿𝑙 dan 𝑉𝑙 (𝑡) = 𝐿𝑙 𝑑𝑖𝑙 𝑑𝑡 + 𝑅𝑙 𝑖𝑙 (𝑡) ... (2.23) Dimana ; 𝑉𝑙 (𝑡) = 𝑡𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑓𝑎𝑠𝑎 𝑏𝑒𝑏𝑎𝑛 𝑖𝑙 (t) = arus fasa beban
Memakai transformasi Park’s pada kedua Persamaan (2.22) dan Persamaan (2.23) mempunyai persamaan d-q berikut;
L𝑑𝑖𝑙𝑑
𝑑𝑡 + 𝑅𝑙 𝑖𝑙𝑑(𝑡) − 𝜔𝐿 𝑖𝑙𝑞(𝑡) = 𝑉𝑔𝑑(𝑡) + 𝐾𝑡𝑉𝑐𝑑(𝑡) ... (2.24)
L𝑑𝑖𝑙𝑞
𝑑𝑡 + 𝑅𝑙 𝑖𝑙𝑞(𝑡) + 𝜔𝐿 𝑖𝑙𝑑(𝑡) = 𝑉𝑔𝑞(𝑡) + 𝐾𝑡𝑉𝑐𝑞(𝑡) ... (2.25)
Dan dari persamaan (2.25), 𝑉𝑙𝑑(𝑡) = 𝐿𝑙𝑑𝑖𝑙𝑑
𝑑𝑡 + 𝑅𝑙 𝑖𝑙𝑑(𝑡) − 𝜔𝐿𝑙 𝑖𝑙𝑞(𝑡) ... (2.26)
𝑉𝑙𝑞(𝑡) = 𝐿𝑙𝑑𝑖𝑙𝑞
𝑑𝑡 + 𝑅𝑙 𝑖𝑙𝑞(𝑡) + 𝜔𝐿𝑙𝑖𝑙𝑑(𝑡) ... (2.27)
Dimana; ω = frekuensi sudut, yang memiliki sistem yang ditandai dengan 𝑥𝑑 dan 𝑥𝑞
Sebuah kedip tegangan simetris terjadi pada t = 𝑡0 dapat diwakili dalam sistem referensi ini dengan variasi langkah tegangan jaringan ∆𝑉𝑔𝑑(q) .
d dan q adalah komponen sumbu kuantitas masing-masing.
Dari itu selama kedip, persamaan (2.26) dan (2.27) dapat ditulis kembali dalam bentuk variasi tegangan jaringan sehubungan dengan kondisi pre-sag, mendapatkan sistem persamaan diffrensial biasa, dengan kondisi awal ∆𝑖𝑙𝑑(𝑡0) = ∆𝑖𝑙𝑔(t0) = 0.
Ini memungkinkan menerapkan transformasi Laplace dan menulis Persamaan (2.26) dan persamaan (2.27) yang menghasilkan Persamaan (2.28) dan (2.29) :
sL∆𝑖𝑙𝑑 (s) + 𝑅𝑙∆𝑖𝑙𝑑(𝑠) − 𝜔𝐿∆𝑖𝑙𝑞(𝑠) = ∆𝑉𝑔𝑑(𝑠) + 𝐾𝑡∆𝑉𝑐𝑑(𝑠) .... (2.28) sL∆𝑖𝑙𝑞(𝑠) + 𝑅𝑙∆𝑖𝑙𝑞(𝑠) + 𝜔𝐿∆𝑖𝑙𝑑(𝑠) = ∆𝑉𝑔𝑞(𝑠) + 𝐾𝑡∆𝑉𝑐𝑞(𝑠) .... (2.29) Dan dari persamaan (2.26) dan (2.27), diperoleh Persamaan (2.30) dan (2.31) ;
∆𝑣𝑙𝑑(𝑠) = 𝑠𝐿1∆𝑖𝑙𝑑(s)+𝑅1 ∆𝑖𝑙𝑑(𝑠) − 𝜔𝐿𝑖∆𝑖𝑙𝑄𝑞(𝑠) ... (2.31)
∆𝑣𝑙𝑔(𝑠) = 𝑠𝐿1∆𝑖𝑙𝑑(s)+𝑅1 ∆𝑖𝑙𝑞(𝑠) + 𝜔𝐿𝑖∆𝑖𝑙𝑑(𝑠)] ... (2.31) Setelah beberapa manipulasi aljabar, satu dengan mudah didapatkan dari Persamaan
(2.28), (2.29), (2.30) dan (2.31) sebagai berikut ;
∆𝑣𝑙𝑑(𝑠) = 𝐺(𝑠)[∆𝑣𝑔𝑑(s)+𝐾1 ∆𝑣𝑐𝑞(𝑠) + 𝐺𝑖(𝑠)∆𝑖𝑙𝑑(𝑠) ... (2.32)
∆𝑣𝑙𝑔(𝑠) = 𝐺(𝑠)[∆𝑣′𝑔𝑑(s)+𝐾1 ∆𝑣𝑐𝑞(𝑠) − 𝐺𝑖(𝑠)∆𝑖𝑙𝑑(𝑠)] ... (2.33) dimana, G(s) dan 𝐺𝑖(s) ditetapkan sebagai;
𝐺(𝑠) =𝑠𝐿1+𝑅1
𝑠𝐿+𝑅1 𝑎𝑛𝑑 𝐺𝑖(𝑠) =
𝜔𝐿1𝑅1
𝑠𝐿+𝑅1 ... (2.34) Oleh karena itu menetapkan sistem
∆𝑣′𝑐𝑑(𝑠) = ∆𝑣′𝑔𝑑(s)+𝐾1 ∆𝑣𝑐𝑞(𝑠) − 𝐺𝑖(𝑠)∆𝑣′𝑐𝑞(𝑠) ... (2.35) ∆𝑣′𝑐𝑑(𝑠) = ∆𝑣′𝑔𝑑(s)+𝐾1 ∆𝑣𝑐𝑞(𝑠) − 𝐺𝑖(𝑠)∆𝑣′𝑐𝑞(𝑠) ... (2.36) Dapat dikontrol, dijelaskan dengan sederhana oleh
∆𝑣𝐼𝑑(𝑠) = 𝐺(𝑠)∆𝑣′𝑐𝑑(s) and ∆𝑣𝑙𝑞(𝑠) = 𝐺(𝑠)∆𝑣′𝑐𝑞(𝑠) ... (2.37) Pasangan Persamaan diatas dalam (2.34) dapat ditulis dalam satu Persamaan tunggal
∆𝑣𝐼𝑑𝑞 = 𝐺(𝑠)𝑣′𝑙𝑞 ... (2.38)
2.6.2. Skema Kendali Fuzzy
Skema kontrol umpan balik yang disebut Persamaan (2.42) diatas, telah ditunjukkan dalam Gambar 2.21. Dalam DVR, terminal tegangan line perlu untuk dipertahankan. Untuk mencapai ini, pengendali fuzzy seperti yang dibahas diatas menggantikan pengendali konvensional. Untuk mengendalikan parameter ini,
tegangan line dirasakan dan dibandingkan dengan nilai referensi. Untuk mencapai hal ini, fungsi keanggotaan dari pengendali fuzzy adalah: error, tingkat perubahan error dan keluaran seperti ditunjukkan dalam Gambar 2.24, 2.25. Dalam pekerjaan ini, fuzzification dan fuzzifier tak seragam telah digunakan. Keluaran variabel kendali diperoleh melalui proses defuzzification dalam pengendali fuzzy yang bertindak sebagai masukan untuk sistem.
Jika sistem tidak seimbang, pengendali harus memperbesar variabel kendali untuk menyeimbangkan sistem sedini mungkin. Di sisi lain nilai error yang kecil ‘e’ menunjukkan bahwa sistem dekat pada keadaan seimbang. Overshoot memainkan peran penting dalam stabilitas sistem. Overshoot yang kurang diperlukan untuk stabilitas sistem dan menahan osilasi. Dalam kondisi seperti itu, (de/dt) memainkan peran penting, sementara peran ‘e’ berkurang.
![Tabel 2.1. Karakteristik Gangguan Tegangan [14]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/3.918.203.775.849.1045/tabel-karakteristik-gangguan-tegangan.webp)
![Gambar 2.2a Kurva CBEMA [14]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/4.918.228.744.474.773/gambar-a-kurva-cbema.webp)
![Gambar 2.2b Kurva ITIC [14]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/5.918.258.764.193.473/gambar-b-kurva-itic.webp)
![Gambar 2.5 Kurva Tingkat Kepekaan Peralatan Terhadap Kedip Tegangan [1]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/10.918.247.734.179.533/gambar-kurva-tingkat-kepekaan-peralatan-terhadap-kedip-tegangan.webp)
![Gambar 2.11 Pembangkitan tegangan keluaran sinusoidal inverter SPWM satu fasa [19]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/19.918.264.684.528.769/gambar-pembangkitan-tegangan-keluaran-sinusoidal-inverter-spwm-satu.webp)
![Gambar 2.14 Metode konduksi inverter 180 o [20]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/21.918.161.802.467.899/gambar-metode-konduksi-inverter-o.webp)
![Gambar 2.15 Bentuk gelombang keluaran inverter pada konduksi 180 o [20]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/22.918.199.832.182.443/gambar-bentuk-gelombang-keluaran-inverter-konduksi-o.webp)
![Gambar 2.17 Sistem Daya Dengan DVR [21]](https://thumb-ap.123doks.com/thumbv2/123dok/4386466.2944252/25.918.265.705.170.332/gambar-sistem-daya-dengan-dvr.webp)
