POMPA ANGGUK
(SUCKER ROD PUMP)
Pemasangan Pompa Angguk (Sucker Rod Pump) pada suatu sumur minyak merupakan salah satu metoda pengangkatan buatan (Artificial Lift) yang telah digunakan secara meluas pada lapangan minyak. Pada saat ini dikenal 3 (tiga) macam pompa sucker rod, yaitu : Conventional Unit, Air Balance dan Mark II. Gambar (1) memperlihatkan fluida dari dasar sumur ke permukaan didasarkan pada gerakan mekanik dari sejumlah peralatan pompa sucker rod, mulai dari bawah permukaan, sepanjang tubing, di kepala sumur, dan diatas permukaan
1. PERALATAN POMPA ANGGUK
Berdasar letaknya, maka peralatan pompa sucker rod dapat dibagi menjadi dua kelompok besar, yaitu : peralatan diatas permukaan dan peralatan dibawah permukaan.
1.1. Peralatan Di Atas Permukaan
Peralatan diatas permukaan berfungsi untuk memindahkan energi dari Prime mover ke pompa sucker rod, dimana untuk selanjutnya diteruskan ke peralatan bawah permukaan. Peralatan ini juga berfungsi untuk mengubah gerak naik turun dan melalui gear reducer mengubah kecepatan prime mover menjadi langkah pemompaan yang sesuai.
Gambar 1 : Jenis-jenis Pompa Angguk (Sucker Rod Pump) (Brown Kermit, The Technology of Artificial Lift Method, 1984)
• Prime mover merupakan pengerak utama, dimana prime mover
akan memberikan gerakan putar yang diubah menjadi gerak naik turun pada polish rod dan sucker rod untuk diteruskan ke peralatan bawah permukaan. Prime mover dapat berupa mesin gas, diesel, motor bakar dan listrik. Prime mover ini disesuaikan dengan tersedianya sumber tenaga tersebut. Jadi pemilihan motor diusahakan mempunyai daya yang cukup untuk mengangkat fluida dan rangkaian rod dengan kecepatan yang diinginkan.
• V-Belt merupakan sabuk untuk memindahkan gerak dari prime
mover ke gear reducer.
• Gear reducer berfungsi mengubah kecepatan putar dari prime
mover menjadi langkah pemompaan yang sesuai. Gear reducer juga merupakan transmisi yang berfungsi untuk mengubah kecepatan putar dari prime mover, gerak putaran prime mover diteruskan ke gear reducer dengan menggunakan belt. Dimana belt ini dipasang engine pada prime mover dan unit sheave pada gear reducer.
• Crank Shaft merupakan poros crank yang befungsi untuk mengikat
crank pada gear reducer dan meneruskan gerak.
• Crank merupakan sepasang tangkai yang menghubungkan crank
shaft pada gear reducer dengan counterbalance. Pada crank ini terdapat lubang-lubang tempat pitman bearing. Besar kecilnya langkah atau stroke pemompaan yang diinginkan dapat diatur disini, dengan cara mengubah-ubah pitman bearing.
Apabila kedudukan pitman bearing ke posisi lubang mendekati counterbalance, maka langkah pemompaan menjadi bertambah besar atau sebaliknya, apabila menjauhi jarak antara crank shaft sampai dengan pitman bearing sebagai polish stroke length, yang fungsinya meneruskan gerak berputar dari crank shaft pada gear reducer ke walking bean melalui pitman.
• Counterbalance adalah sepasang pemberat yang fungsinya :
a. Untuk mengubah gerak berputar dari prime mover menjadi gerak naik turun
b. Menyimpan tenaga prime mover pada saat down-stroke atau pada saat counterbalance menuju ke atas, yaitu pada saat kebutuhan tenaga kecil atau minimum
c. Membantu tenaga prime mover pada saat up-stroke (saat counterbalance bergerak ke bawah) sebesar tenaga potensialnya, karena kerja prime over yang terbesar adalah pada saat up-stroke (pompa bergerak ke atas) dimana sejumlah minyak ikut terangkat ke atas permukaan.
• Pitman adalah penghubung antara walking beam pada equalizer
hearing dengan crank. Lengan Pitman merubah gerakan berputar menjadi gerakan naik-turun.
• Walking Bean merupakan tangkai horizontal dibawah horse head.
Fungsinya merupakan gerak naik turun yang dihasilkan oleh pasangan pitman-crank-counterbalance, ke rangkaian pompa di dalam sumur melalui rangkain rod.
dibagian atas dari polished rod. Jepitan ini kemudian diletakan diatas carrier bar sehingga Polished rod dapat bergerak sesuai dengan gerakan Carrier bar.
• Horse Head berfungsi menurunkan gerak dari walking bean ke unit
pompa di dalam sumur melalui bridle, polish rod dan sucker string atau merupakan kepala dari walking bean yang menyerupai kepala kuda.
• Briddle berfungsi sebagai tali penggantung carrier bar.
• Carrier bar merupakan penyangga dari polished rod clamp.
• Polish Rod Clamp merupakan komponen yang bertumpu pada
carrier bar yang berfungsi untuk mengeraskan kaitan polish rod pada carrier bar dan tempat dimana Dinamometer (alat pencatat unit pompa ) diletakkan.
• Stuffing box dipasang diatas kepala sumur (casing atau tubing
head) untuk mencegah atau menahan minyak agar supaya tidak keluar bersama naik turunnya polish rod. Dengan demikian seluruh aliran minyak hasil pemompaan akan mengalir ke flowline melewati crosstee. Disamping itu juga berfungsi sebagai tempat kedudukan polish head rod, sehingga polish rod dapat bergerak naik turun dengan bebas.
• Polish Rod merupakan bagian teratas dari rangkaian rod yang
muncul di permukaan. Berfungsi untuk menghubungkan antara rangkaian rod di dalam sumur dengan peralatan di permukaan.
produksi ke flow line.
• Sampson post merupakan tiang penyangga walking beam.
• Saddle Bearing adalah tempat kedudukan dari walking bean pada
sampson post pada bagian atas.
• Equalizer adalah bagian atas dari pitman yang dapat bergerak
secara leluasa menurut kebutuhan operasi pemompaan minyak berlangsung.
• Brake berfungsi untuk mengerem gerak pompa jika dibutuhkan,
misalnya pada saat akan dilakukan reparasi sumur atau unit pompanya sendiri.
Secara keseluruhan susunan peralatan pompa sucker rod diatas permukaan ditunjukan pada Gambar 2.
1.2. Peralatan di Bawah Permukaan
Untuk peralatan pompa di bawah permukaan (Subsurface pump equipment ) terdiri dari empat kompnen utama, yaitu : working barrel, plunger, travelling valve dan standing valve.
• Working Barrel merupakan tempat dimana plunger dapat
bergerak naik-turun sesuai dg langkah pemompaan dan menampung minyak terisap oleh plunger pada saat bergerak ke atas ( up stroke ).
a. Working barrel yang terdiri dari sejumlah liner yang diselubungi oleh jacket (biasanya diberi simbol L).
(diberi simbol H atau W ).
Gambar 2 : Peralatan Pompa Sucker Rod di Atas Permukaan (Bethlehem Stell Company, Sucker rod hand book, 1970)
barrel dan dapat bergerak naik turun yang berfungsi sebagai penghisap minyak dari formasi masuk ke barrel yang kemudian di angkat ke permukaan melalui tubing.
• Tubing , seperti halnya pada peralatan sembur alam, tubing
digunakan untuk mengalirkan minyak dari dasar sumur ke permukaan setelah minyak dianggakat oleh plunger pada saat up stroke.
• Standing valve , merupakan bola yang ikut bergerak naik turun
menurut gerakan plunger dan berfungsi mengalirkan minyak dari working barrel masuk ke plunger dan hal ini terjadi pada saat plunger bergerak ke atas dan selanjutnya standing valve membuka. Pada saat plunger bergerak ke bawah standing valve akan menutup untuk mencegah fluida keluar ke annulus.
• Travelling valve , merupakan bola yang ikut bergerak naik turun
menurut gerakan plunger dan berfungsi mengalirkan minyak dari working barrel masuk ke plunger dan hal ini terjadi pada saat plunger bergerak ke bawah serta menahan minyak keluar dari plunger pada saat plunger bergerak ke atas.
• Gas anchor , merupakan komponen pompa yang dipasang di
bagian bawah dari pompa yang berfungsi untuk memisahkan gas dari minyak agar gas tersebut tdk ikut masuk ke dalam pompa bersama-sama dg minyak, untuk menghidari masiknya pasir atau padatan kedalam pompa, dan mengurangi atau menghindari terjadinya tubing stretch.
Gas ini dialirkan masuk ke annulus dan dilepaskan ke permukaan melalui
Ada dua macam type Gas Anchor, yaitu :
Poorman type.
Packer type
a. Poorman type
Larutan gas dalam minyak yang masuk ke dalam anchor akan melepaskan diri dari larutan (bouyancy effect). Minyak akan masuk ke dalam barrel melalui suction pipe , sedangkan gas yang telah terpisah akan dialikan melalui annulus. Apabila suction pipe terlalu panjang atau diameternya terlalu kecil, maka akan terjadi pressure loss yang cukup besar sehingga menyebabkan terjadinya penurunan PI sumur pompa. Sedangkan apabila suction pipe terlalu besar akan meyebabkan annulus antara dinding anchor dengan suction pipe menjadi lebih kecil, sehingga kecepatan aliran minyak besar dan akibatnya gas masih terbawa oleh butiran-butiran minyak. Diameter gas anchor yang terlalu besar akan menyebabkan penurunan PI sumur pompa.
b. Packer type
Minyak masuk melalui ruang antara dinding anchor dan suction pipe, kemudian minyak jatuh di dalam annulus antara casing dan gas anchor dan ditahan oleh packer, selanjutnya minyak masuk ke pompa melalui suction pipe. Disini minyak yang masuk kedalam annulus sudah terpisah dari pompa.
• Tangkai pompa
Tangkai pompa (sucker rod string) terdiri dari : Sucker rod
Pony rod Polished rod a.
Sucker rod
Merupakan batang/rod penghubung antara plunger dg peralatan di permukaan. Fungsi utamanya adalah melanjutkan gerak lurus naik turun dari horse head ke plunger.
Berdasarkan konstruksinya maka Sucker rod dibedakan menjadi dua, yaitu :
Berujung box pin Berujung pin-pin
Untuk menghubungkan antara dua sucker rod digunakan sucker rod coupling. Umumnya panjang satu single dari sucker rod yang sering digunakan berkisar antara 20 – 30 ft.
Dalam perencanaan sucker rod selalu diusahakan dipilih yang ringan, artinya memenuhi kriteria ekonomis, tapi dengan syarat tanpa mengabaikan persyaratan stress yang diijinkan (allowable stress) pada sucker rod tersebut. Sucker rod yang dipilih dari permukaan sampai unit pompa di dasar sumur tidak perlu sama diameternya tetapi dapat dilakukan / dibuat kombinasi dari beberapa tipe dan ukuran rod. Sucker rod string yang merupakan kombinasi dari beberapa tipe dan ukuran tersebut, disebut tappered rod string.
b.
Pony rod
Pony rod merupakan rod yang mempunyai panjang yang lebih pendek dari panjang rod umumnya (+ 25 ft). fungsinya adalah untuk melengkapi panjang dari sucker rod apabila tidak mencapai kepanjangan yang dibutuhkan, ukurannya adalah 2,4,6,8,12 ft.
c.
Polished rod
Polished rod merupakan tempat rod yang berada diluar sumur yang menghubungkan sucker rod string dengan carrier bar dan dapat naik turun dalam stuffing box. Diameter stuffing box lebih besar dari diameter sucker rod, yaitu 1 1/8, 1 ¼, 1.5, 1 ¾. Panjang polished rod adalah 8,11,16,22 ft.
Selanjutnya apabila dilihat dari pemasangan sistem barrel maka peralatan di bawah permukaan sucker rod ini diklasifikasikan menjadi 2 tipe, yaitu :
1.
Tubing pump
Pada tipe ini working barrel dipasang langsung didalam tubing dan diturunkan bersama tubing, bila terjadi kerusakan pada working barrel atau standing valve maka untuk memperbaikinya keseluruhan dari tubing harus dicabut.tipe pompa ini sering digunakan pada sumur-sumur dangkal dan produktifitas kecil.
2.
Rod pump
Pada tipe ini working barrel, plinger, travelling valve, dan standing valve merupakan satu unit kesatuan yang dipasang langsung pada rod string. Kapasitas pompa yang diperoleh lebih kecil karena ukuran plunger lebih kecil.
Apabila terjadi kerusakan pada standing valve atau barrel, maka untuk memperbaikinya tidak perlu mencabut seluruh tubing. Tipe pompa ini sering digunakan pada sumur-sumur dalam dan dibedakan menjadi 3 , yaitu :
a. Tipe stationary barrel-top anchor, misalnya RWA.
b. Tipe stationary barrel-bottom anchor, misalnya RWB.
c. Travelling barrel-bottom anchor, misalnya RWT.
Perbedaan tipe pompa tubing pump dan rod pump ditujukan Gambar 3. Sedangkan klasifikasi peralatan pompa bawah permukaan berdasar sistem barrelnya menurut standart API diperlihatkan pada Tabel 1 dan Gambar 4.
Tabel 1
Klasifikasi Pompa Standart API
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
TIPE POMPA KLASIFIKASI
FULL BARREL LINER BARREL
Tubing dengan regular shoe TW TL
Tubing dengan regular shoe dan nipple TWE TLE
Rod, stationary barrel top hold down RWA RLA
Rod, stationary barrel-bottom hold
down RWB RLB
Gambar 3 : Peralatan Bawah Permukaan Jenis Tubing Pump dan Rod Pump
Gambar 4 : Klasifikasi Pompa Menurut API
Huruf-huruf yang terdapat pada Tabel 1 dan Gambar 4 menunjukan penambahan tipe pompa nya.
T menyatakan tipe tubing pump R menyatakan tipe rod pump
Kedua huruf yang terdiri dari W dan L, dimana :
W menyatakan tipe full barrel L menyatakan tipe linier barrel
Sedangkan huruf ketiga yang terdiri dari E, A, B, dan T adalah :
E menyatakan extention shoe dan nippel
A menyatakan stationary barrel dg bagian atas yang disambung B menyatakan stationary barrel dg bagian atas dan bawah
disambung pada tubing.
T menyatakan travelling barrel.
Umumnya suatu unit sucker rod pump dituliskan dengan menggunakan simbol-simbol tertentu, contohnya :
C-160D-173-64
kode-kode ini menunjukan spesifikasi pompa dipermukaan. Arti dari kode tersebut diatas adalah :
C = conventional (A = air balance, B = beam counter balance, M = mark II)
160 = peak torque rating – ribuan in-lb (torsi puncak yang diijinkan) D = double reduction gear reducer
polished rod)
64 = panjang langklah stroke maximum, in
(biasanya juga bisa diset pada 54 in dan 48 in tergatung pada pabrik). Umumnya panjang langkah dapat diatur sampai 4 pada pompa tertentu. Angka diatas adalah yang terpanjang
Simbol API sebagaimana yang tercantum pada Gambar 4 serta Gambar 5 merupakan spesifikasi peralatan bawah permukaan. Sebagai contoh :
20-150-RWBC-20-4-2
artinya pompa untuk tubing 2 3/8 dengan diameter plunger 1 ½. Pompa tipe rod (insert), dg barrel berbanding tipis, bottom hold down (dipegang dibawah) dan menggunakan tipe mangkok (cup ) untuk kedudukannya. Panjang pompa adalah 20” dg plunger 4 ft dan extention 2 ft.
Gambar 5 : Pump Designation
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
2. PRINSIP KERJA POMPA SUCKER ROD
Mekanisme kerja pompa sucker rod dapat dijelaskan menggunakan Gambar 6 . Prime mover menghasilkan gerak rotasi, gerakan ini dirubah menjadi gerakan naik-turun oleh pumping unit, terutama oleh sistem pitman assembly crank. Kemudian gerak anguk naik-turun ini oleh horse head dijadikan gerakan angguk naik-turun yang selanjutnya menggerakan plunger yang berada di dalam sumur.
Instalasi pumping unit dipermukaan dihubungkan dengan pompa yang ada di dalam sumur oleh sucker rod , sehingga gerak lurus naik-turun dari horse head dipindahkan ke plunger pompa dan plunger ini bergerak naik turun dalam barrel pompa. Pada saat upstroke, plunger bergerak keatas, dibawah plunger terjadi penurunan tekanan. Karena tekanan dasar sumur lebih besar dari tekanan di dalam pompa, maka kondisi ini mengakibatkan standing valve terbuka dan minyak masuk ke dalam pompa. Minyak diatas travelling valve akan terangkat keatas pada waktu up stroke. Pada saat down stroke, standing valve tertutup karena tekanan minyak dalam barrel pompa lebih besar dari tekanan dasar sumur, sedangkan pada bagian atasnya, yaitu travelling valve terbuka oleh minyak akibat turunnya plunger, selanjutnya minyak akan masuk ke dalam tubing. Proses ini dilakukan secara berulang-ulang sehingga minyak sampai ke permukaan dan terus ke separator melalui flow line.
Gambar 6 : Mekanisme Kerja Sucker Rod Pump (Brown Kermit, The Technology of Artificial Lift Method, 1984)
Komponen-komponen peralatan pompa sucker rod merupakan suatu gabungan yang komplek, dg kata lain akan saling tergantung.
3.1. Analisa Gerakan Rod
Apabila sucker rod digantung pada polished rod atau bergerak naik turun pada kecepatan konstan, maka gaya yang bekerja pada polished rod adalah berat dari sucker rod, WR, dalam hal ini sucker rod mengalami percepatan. Polished rod akan menderita beban tambahan yaitu beban percepatan.
a g Wr
Faktor percepatan atau faktor dimana bobot mati dari rod harus dikalikan dengan faktor kecepatan ini untuk mendapatkan beban percepatan yang maksimal, dinyatakan sebagai :
g a
=
α (1)
Dimana :
a = percepatan maksimum yang terdapat pada sucker rod string g = percepatan gravitasi
Suatu study terhadap gerakan yang ditransmisikan dari prime mover ke sucker rod menunjukan bahwa gerakan sucker rod hampir merupakan gerak beraturan yang sederhana.gerak beraturan ini dapat dinyatakan sebagai proyeksi suatu partikel yang bergerak melingkar pada garis tengah lingkaran tersebut.
Gambar 7 : System Gerakan Sucker Rod
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
Apabila hal tersebut diatas di hubungkan dengan sistem sucker rod, maka :
1. Diameter lingkaran menyatakan panjang langkah polished rod 2. Waktu untuk satu kali putaran dari partikel yang melngkar sama
dengan waktu untuk satu kali siklus pemompaan.
Percepatan maksimum dari pada sistem sucker rod terjadi pada awal upstroke dan awal down stroke, yaitu pada saat titik proyeksi mempunyai jarak yang jauh dari pusat gerak melingkar.
Pada saat tersebut percepatan dari pada proyeksi sama dengan percepatan gerak melingkar, yaitu :
e 2 p r V = a (2) Dimana : Vp = kecepatan partikel re = jari-jari lingkaran
Apabila waktu untuk satu kali putaran, maka :
τ π
= e
P 2 r
V (3)
Apabila N = jumlah putaran persatuan waktu :
N r 2π
Vp = e (4)
Dimana N = 1/α , jika Persamaan (2), (4) disubtitusikan pada Persamaan (1) di dapat : g N r 4 g r V 2 e 2 e 2 P = π (5)
Untuk sumur pompa :
N = kecepatan pompaan
re = dapat dihubungkan dengan polished rod, stroke length yaitu :
2 S
g N S 2π2 2 = α (7)
Panjang langkah polished rod biasanya dinyatakan dalam inchi, dan kecepatan pemompaan dalam stroke per menit (SPM), maka :
2 2 2 2 sec 3600 in 12 ft/sec 32,2 min 1 ft 1 in/min N S 2π = α 70500 N S 2 = α (8)
3.2. Sucker Rod String
Sucker rod string ada/didapati pada sumur-sumur yang dalam, dan tidak hanya terdiri dari satu macam diameter, merupakan tapered rod (makin keatas makin besar diameternya, karena membawa beban yang lebih berat). Dengan anggapan bahwa stress disetiap bagian sama (pada puncak masing-masing interval), maka design untuk beberapa bagian (fraksi) dari masing-masing diameter diberikan seperti pada Tabel 1.
Pada Tabel 2, R1, R2, R3, dan seterusnya adalah fraksi panjang dari seluruh rod, dan karena umumnya suatu potongan rod mempunyai panjang 25 ft, maka pembulatan selalu 25 ft.
3.3. Effective Plunger Stroke (S
p)
Jumlah volume minyak yang diperoleh selama pemompaan tidak tergantung pada panjang polished rod, tetapi tergantung pada gerakan
stroke.
Tabel 2-2
Kombinasi Untuk Sucker Rod
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
Ukuran rod pada string (in)
Harga R sebagai fungsi Luas Plunger (AP)
Catatan : R1 adalah yang bawah atau terkecil
5/8 – 3/4 R1 = 0.759 – 0.0896 Ap R2 = 0.241 + 0.0896 Ap 3/4 – 7/8 R1 = 0.786 – 0.0566 Ap R2 = 0.214 + 0.0566 Ap 7/8 – 1 R1 = 0.814 – 0.0375 Ap R2 = 0.186 + 0.0375 Ap 5/8 – 3/4 – 7/8 R1 = 0.627 – 0.1393 Ap R2 = 0.199 + 0.0737 Ap R3 = 0.175 + 0.0655 Ap 3/4 – 7/8 – 1 R1 = 0.644 – 0.0894 Ap R2 = 0.181 + 0.0478 Ap R3 = 0.155 + 0.0146 Ap 3/4 – 7/8 – 1 – 1 1/8 R1 = 0.582 – 0.1110 Ap R2 = 0.159 + 0.0421 Ap R2 = 0.137 + 0.0364 Ap R2 = 0.123 + 0.0325 Ap
Pada dasarnya langkah ini berbeda dengan polished rod stroke. Perbedaan ini disebabkan oleh :
1. Adanya rod stretch dan tubing stretch
2. Adanya plunger over travel yang disebabkan adanya percepatan Dengan demikian perlu diperkirakan adanya rod stretch dan tubing stretch serta over travel. Yang mana hal ini telah dikembangkan oleh Marsh dan Coberly.
valve terbuka, beban fluida bekerja pada tubing yang menyebabkan elongasi pada tubing tersebut.
Pada awal Up-stroke, travelling valve tertutup, menimbulkan perpanjangan pada rod dan pembukaan pada standing valve menyebabkan tubing mengalami stretch.kembalinya tubing ke panjang semula menyebabkan working barrel bergerak lebih keatas.
Perpanjangan rod menyebabkan plunger bergerak kebawah. Dengan demikian effective plunger stroke berkurang sebesar jumlah perpanjangan rod dan tubing yang disebabkan oleh beban fluida.
Untuk suatu deformasi elastik, terdapat perbandingan antara stress yang bekerja pada suatu benda dengan strain yang dihasilkan oleh stress tersebut yang besarnya konstan, yaitu :
Strain Stress
E= (9)
Dimana:
E = modulus elastisita, tergantung pada beban yang dipergunakan Sedangkan stress merupakan gaya persatuan luas, maka :
A F tress
S = (10)
Dan strain adalah fraksi perubahan panjang, yaitu :
Strain = e / L (11)
Gaya (F) dinyatakan dalam Lb, penampang (A) dinyatakan dalam in2. Perpanjangan (e) dan panjang mula-mula (L) dinyatakan dalam satuan
panjang dalam ft, dengan demikian Persamaan (11) merubah menjadi : L 12 e train S = (12)
Apabila Persamaan (12) disubtitusikan kedalam Persamaan (9) menjadi : A e FL 12 L 12 / e /A F E= = (13) A E FL 12 e= (14)
Gaya yang disebabkan oleh beban fluida yang disebabkan adanya perbedaan tekanan sepanjang plunger, dan bekerja pada luas permukaan AP, adalah :
F = ∆ P x AP (15)
Apabila dianggap bahwa pompa dipasang pada working fluid level, perbedaan tekanan ( delta P ) pada plunger adalah tekanan kolom fluida dengan specific gravity G, sepanjang L (kedalaman pompa).
∆ P = 0,433 G L (16)
Untuk suatu hal yang umum, dimana working fluid level terletak pada kedalaman D, tekanan C (dibawah plunger) yang disebabkan oleh kolom fluida didalam casing setinggi (L-D) harus diperhitungkan. Dengan demikian :
Dari Persamaan (14) : A E FL 12 e= A E L A D G 0,433 x 12 = P A E L A D G 520 = (18)
Persamaan (18) diatas merupakan Persamaan umum. Persamaan tersebut dapat untuk menghitung perpanjangan dari suatu benda yang mengalami pembebanan.
Berdasarkan persamaan (18), maka :
1. Perpanjangan tubing (et) adalah :
e1 = 5,20 G D AP L / E At (19)
2. Perpanjangan rod string (er) adalah :
er = 5,20 G D AP L / E Ar (20)
Dimana :
et = perpanjangan tubing, in er = perpanjangan rod, in G = specific gravity fluida D = working fluid level, ft
L = kedalaman letak pompa, ft Ap = Luas penampang plunger, sq-in
Ar = Luas penampang rod, sq-in E = modulus elastisitas = 30 x 10 6
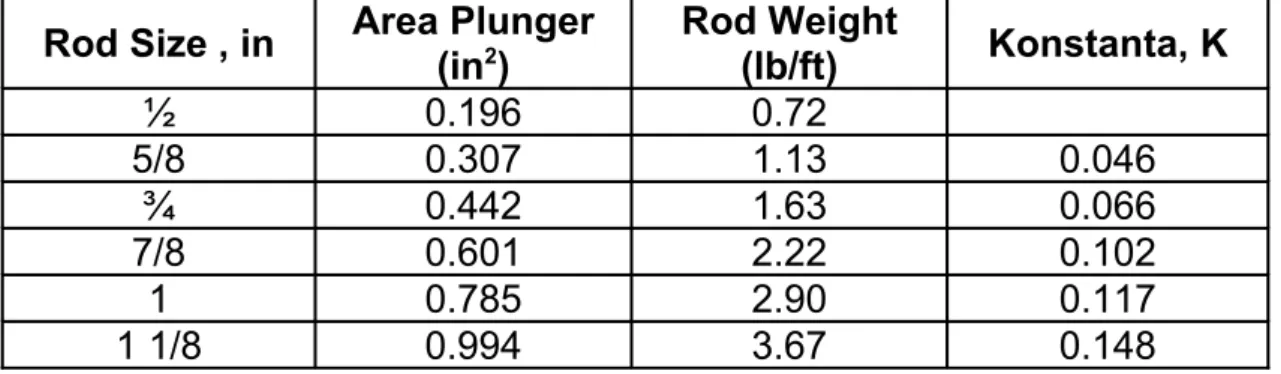
Bila dipasang anchor pada tubing, maka bentuk L/A t , dapat diabaikan. Besarnya Ar, At, Ap, dari masing-masing ukuran rod, tubing atau plunger dapat dilihat pada Tabel (3), (4) dan (5) berikut :
Tabel 3 Data Sucker Rod
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
Rod Size , in Area Plunger (in2)
Rod Weight (lb/ft) Konstanta, K ½ 0.196 0.72 5/8 0.307 1.13 0.046 ¾ 0.442 1.63 0.066 7/8 0.601 2.22 0.102 1 0.785 2.90 0.117 1 1/8 0.994 3.67 0.148 Tabel 4 Data Tubing
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
Normal Size
(in) Outside Diameter (in) Weight (lb/ft) Wall Area (sq-in)
1 ½ 1.900 2.90 0.800 2 2.375 4.7 1.304 2 ½ 2.875 6.50 1.812 3 3.500 9.30 2.59. 3 ½ 4.000 11.00 3.077 4 4.500 12.75 3.601
Tabel 5
Data Plunger Pompa
(Brown Kermit, The Technology of Artificial Lift Method, 1984)
Diameter In Area Aq-in Pump Content Bbl/day/in/spm 1 0.785 0.116 1 1/16 0.886 0.131 1 ¼ 1.227 0.182 1 ½ 1.767 0.262 1 ¾ 2.405 0.357 1 25/32 2.448 0.369 2 3.142 0.466 2 ¼ 3.976 0.590 2 ½ 4.909 0.728 2 ¾ 5.940 0.881 3 ¾ 11.045 1.639 4 ¾ 17.721 2.630
Untuk Tappered rod string, perpanjangan rod dicari untuk masing-masing bagian, yaitu :
e1 = 5,20 G D AP L1 / E A1
e2 = 5,20 G D AP L / E A2 ………… dst Dimana :
e1 = perpanjangan rod bagian pertama dengan panjang L1 e2 = perpanjangan rod bagian kedua dengan panjang L2 Dari gabungan Persamaan diatas, perpanjangan rod total adalah:
+ + = ... A L A L E A D G 5,20 e 2 2 1 1 P r (21)
Rod mengalami perpanjangan akibat berat rod itu sendiri dan beban percepatan. Untuk tappered rod, beban rod bervariasi secara uniform dari harga nol (yaitu dari bagian bawah rod) sampai sebesar Wr (yaitu puncak dari rod). Rata-rata berat dari rod yang menyebabkan perpanjangan adalah Wr/2, apabila dipusatkan pada L/2.
Perpanjangan rod yang emngakibatkan berat rod dan beban percepatan, tidak sama besarnya pada waktu upstroke ataupun downstroke.
Pada akhir downstroke, perpanjangan rod , adalah :
(
)
r r r d 12 W E WA L/2 e = + α (22)Dan perpanjangan pada waktu upstroke , adalah :
(
)
r r r u 12 W E WA L/2 e = + α (23)Dari Persamaan (22) dan (23) dapat ditentukan perpanjangan yang disebabkan oleh beban percepatan , yaitu :
r r u d P A E L W 12 e e e = = α (24)
Sedang berat rod string, adalah :
144 A L Wr = ρr r (25) Dimana : α = faktor percepatan
Maka : E L 40,8 144 A L 490 A E L 12 e 2 t r P = α = α (26) Dimana :
E = modulus Young besi = 30 x 10 6 psi
Persamaan (26) digunakan untuk untappered rod string, sedangkan untuk tappered rod string dilakukan pendekatan dengan persamaan berikut: eP = (32,8 L2 α ) / E (27) Dimana : eP = plunger overtravel, in L = panjang rod, ft α = faktor percepatan = S N2 /70500 S = panjang langkah, in N = langkah/menit, SPM
Persamaan (27) akan memberikan perbedaan sekitar 25%, tetapi hal ini tidak berpengaruh banyak dalam effective plunger stroke.
Dengan demikian effective plunger stroke adalah panjang langkah (Polished rod stroke) dikurangi dengan perpanjangan rod ditambah dengan (rod & tubing stretch) sebagai akibat beban fluida ditambah dengan plunger overtravel, maka :
Persamaan sebagai berikut : + + α + = ... A L A L E A D G 5,20 -E L 40,8 S S 2 2 1 1 P 2 P (29)
Dalam hal ini tappered rod string, Persamaan (29) menjadi :
+ α + = A 1 A 1 E A D G 5,20 -E L 40,8 S S r t P 2 P (30) Dimana :
L1, L2, L3, … adalah panjang-panjang rod (bila diametrnya berbeda-beda untuk sistem tersebut, ft
A1, A2, A3, … adalah luas penampang masing-masing bagian rod yang berbeda-beda untuk, inch2
Catatan : dalam hal tubing dipasang anchor, maka At dapat diabaikan dan Persamaan (29) tidak mengandung At.
3.4. Kecepatan Pompa
Akibat dari pemompaan akan timbul getaran yang dialami oleh rod string. Getaran yang dialami rod tersebut adalah merupakan resultan dari getaran aslinya (transmitted wave) dengan getaran yang dipantulkan (reflected wave). Gambaran mengenai terjadinya getaran dari pada rod string adalah seperti pada Gambar 8.
Apabila transmitted wave dan reflected wave terjadi serempak (syncronous), maka akibatnya akan terjadi resultan getaran yang maksimum (saling menguatkan). Akan tetapi bila antara kedua macam
merupakan getaran yang saling melemahkan.
Maka dapatlah dimengerti bahwa kecepatan pemompaan setiap menit harus tidak boleh menimbulkan getaran yang maksimum, karena hal tersebut dapat membahayakan rod string (menyebabkan putus). Sehingga dibuat supaya getaran yang terjadi adalah getaran yang saling melemahkan.
Secara teoritis, dengan ketentuan kecepatan getaran pada baja sama dengan 15800 fps, maka akan terjadi getaran non-syncronous, jika :
N = 237.000 / n L (31)
Dimana :
N = kecepatan pemompaan, SPM L = panjang sucker rod string, ft n = bilangan tidak bulat
Jadi menentukan N dari pemompaan harus dipilih supaya harga n tidak bulat. Dihindarkan harga n = 1,2,3,… dst, karena harga n bulat akan terjadi getaran yang syncronous .
Gambar 8 : Getaran Yang Terjadi Pada Rod String (Craft, B.C., Holden., Well Design Drilling and Production, 1962)
3.5. Perhitungan Counterbalance
Fungsi utama Counterbalance adalah menyimpan tenaga pada waktu upstroke dan waktu downstroke serta melepaskan tenaga pada waktu upstroke.
Secara teoritis counterbalance effect ideal (Ci) harus sedemikian rupa sehingga prime mover akan membawa beban rata-rata yang sama besarnya baik pada waktu upstroke ataupun pada waktu down stroke (Craft-holden, 1962 & Brown Kermit, 1984), yang dinyatakan sebesar :
Counterbalance yang ideal adalah :
Ci = 0,5 (Wmax + Wmin) (33)
Dengan menggunakan parameter Wmax dan Wmin yang di dapat dari hasil perhitungan Polished rod load, maka akan diperoleh counterbalance effect ideal sebesar :
Ci = 0,5 Wf Wr(1-0,127 G) (34)
3.6. Perhitungan Torsi (Puntiran)
Perhitungan torsi sangat erat hubungannya dengan perencanaan counterbalance, karena pumping unit harus bekerja pada torsi yang diijinkan. Torsi dari pumping unit yang bekerja tidak boleh melebihi puntiran yang diijinkan pada gear reducer yang telah ditentukan oleh pabrik pembuatannya.
Pada Gambar 9 ditujukan besarnya beban polished rod (W) ditransmisikan ke crank melalui pitman yang bergerak dengan arah vertikal. Dari gambar tersebut puntiran bersih terhadap VCXF dinyatakan (Craft-Holden, 1962), sebagai berikut :
T = Wr sin θ - We d sin θ (35)
dimana :
T = gaya puntiran, Lbs W = beban polished rod, Lbs We = counterweight, Lbs
r = jarak dari crankshaft ke pitman bearing (Gambar 9) d = jarak dari crankshaft ke pusat titik O, in
θ = sudut yang dibentuk oleh crank dengan bidang vertikal, derajat Apabila geometri dari peralatan permukaan diabaikan, yaitu jarak dari “saddle bearing” ke “tail bearing” serta “struktural unbalance” dari instalasi permukaan, maka akan diperoleh persamaan untuk :
Ci = 2 We d / S (36)
dimana :
C = Crank Counterbalance, lbs Wc = berat Counterbalance, lbs S = panjang langkah, in
Gambar 9 : Gaya-gaya Yang Bekerja pada Crank (Craft, Holden., Well Design Drilling and Production)
T = W (S/2) sin θ - C (S/2) sin θ
= (W - C) (S/2) sin θ (37)
Harga maksimum untuk variabel-variabel W dan sin θ masing-masing adalah Wmax dan sin θ = 1 atau θ = 90, dengan demikian putiran maksimum (peak torque) adalah :
Tp = (Wmax - C) (S/2) (38)
dimana :
Tp = peak torque maksimum, Lbs
Dalam perhitungan harga peak torque (C) diasumsikan 95% dari harga idealnya (Ci), maka persamaan (38) menjadi :
Tp = (Wmax – 0,95 Ci) (S/2) (39)
4. KAPASITAS POMPA (PUMP DISPLACEMENT)
Dengan prinsip torak (piston), maka volume teoritis pemompaan (pump displacement) adalah :
bbl in 9702 hari menit / 1440 x menit Stroke N x stroke) (in / Sp x ) in ( A V 3 2 P = = 0,1484 Ap Sp N bbl /hari (40)
Persamaan (40) diatas harga 0,1484 Ap merupakan konstanta untuk suatu diameter plunger tertentu, dan dinotasikan dengan K yang disebut sebagai konstanta pompa (Tabel 3) :
V = K Sp N bbl/hari (41)
Untuk mencari harga rate produksi yang sebenarnya dari pump displacement perlu diketahui “effisiensi volumetris” dari pompa tersebut, Ev.
Jadi : q = V/Ev (42)
dimana :
q = rate produksi, bbl/h
V = pump displacement, bbl/h
Ev = efisiensi volumetris antara 25 – 100 % tergantung dari gas di sumur tersebut, umumnya diambil antara 75 – 80 %
5. EFISIENSI TOTAL POMPA SUCKER ROD
Dengan mengetahui besanya horse power, maka akan dapat ditentukan efisiensi total dari pompa sucker rod. Efisiensi total pompa adalah hasil kali dari dua efisiensi, yaitu efisiensi permukaan (above ground efficiency) dan efisiensi bawah permukaan (bellow ground efficiency). Besarnya horse power yang perlu diketahui disini adalah :
Polished rod horse power (PRHP) Hidroulic horse power (HHP)
Power input (power yang dibutuhkan prime mover selama
pemompaan berjalan) atau Brake horse power (BHP)
mempengaruhi beban bersih (net load) Polished rod yaitu : a. Beban fluida
b. Bobot mati dari pada rod
c. Beban percepatan dari pada sucker rod
d. Gaya keatas pada sucker rod yang tercelup dalam fluida e. Gaya gesekan
Dalam hal ini yang diabaikan beban getaran dan beban percepatan sehubungan dengan fluida yang diangkat.
Berat tappered rod string adalah :
Wr = M1L1 + M2L2 + … + MnLn (43)
dimana :
M1 = berat rod, section pertama dari tappered rod, Lb/ft L1 = panjang rod, section pertama, ft
Berat percepatan maksimum adalah Wr α (44) Berat percepatan minimum adalah - Wr α (45)
Dengan menganggap density rod 490 Lb/cuft, volume rod string sama dengan volume fluida yang dipindahkan rod string adalah :
cuft 490 W density berat Volume = = r (46)
Density fluida yang dipindahkan 62,4 G (dimana G = Specific grafity) Lb/cuft. Gaya keatas yang bekerja pada rod, adalah berat fluida yang dipindahkan yaitu,
x 62,4 G 490 W keatas Gaya = r
Beban fluida yang digunakan dalam perhitungan beban polished rod adalah berat kolom fluida yang ditahan oleh plunger, volume dari kolom fluida dari plunger dan setinggi rod string adalah :
cuft 144 A L Volume = P (48)
Volume fluida dapat diperoleh dari Persamaan (48) dikurangi Persamaan (46) cuft 490 W -144 A L Volume = P r (49)
Beban fluida Wf adalah :
Wf = 62,4 G {(L AP / 144) – (Wr /490)}
Wf = 0,433 G {(L AP – 0,294Wr)} (50)
Beban fluida tersebut hanya bekerja pada polished rod pada waktu upstroke. Selanjutnya beban gesekan tidak dapat diturunkan secara matematis, tetapi beban ini dapat diperkirakan secara empiris dengan dynamometer tes. Sedangkan untuk keperluan disain, gesekan ini dapat dinyatakan sebagai + F , pada waktu upstroke dan – F pada waktu downstroke.
Jadi, beban polished rod maksimum yang terjadi pada waktu upstroke adalah :
Wmax = Wf + Wr + Wr α + F (51)
Beban polished rod minimum yang terjadi saat downstroke :
Jika Persamaan (51) digunakan untuk menghitung beban maksimum, suku yang terakhir diabaikan, oleh karena itu beban gesekan tidak dapat dihitung dengan tepat.
Wmax = Wf + Wr ( 1 - α ) (53)
Dengan cara yang sama, perhitungan beban minimun juga dengan mengabaikan beban gesekan.
Wmin = Wr ( 1 - α - 0,127 G ) (54)
5.2. Hidraulic Horse Power
Hidraulic horse power (HHP) adalah besarnya horse power yang diperlukan pompa untuk mengangkat sejumlah fluida secara vertikal saat pemompaan berlangsung. Hal penting di dalam penentuan horse power ini adalah net lift (LN). pengertian net lift yaitu, jarak angkat efektif pompa dalam satuan ft. besarnya net lift, dapat ditentukan dengan persamaan dibawah :
,ft W W Lx LN fc fm = (55) dimana :
L = panjang rod string, ft
Wfm = berat rod + fluida –berat rod, Lbs Wfc = berat fluida, Lb
persamaan:
HHP = 7,36 x 106 x q G LN, hp (56) dimana :
q = rate produksi, BPD G = specific gravity fluida LN = Net lift, ft
5.3. Brake Horse Power (Power Input)
Power input ini menunjukan besarnya horse power yang dibutuhkan oleh prime mover pada operasi pompa sucker rod.ada dua power load yang harus dipertimbangkan selama terjadi gerakan fluida dari pompa ke permukaan, yaitu pertama adalah hidraulic horse power seperti telah dijelaskan pada bagian sebelumnya, dan kedua adalah friction horse power diberi simbol Hf. harga Friction horse power dapat ditentukan dengan persamaan sebagai berikut :
lb/min/hp -ft 33000 /ft x in 12 lb/min -in N. . S . W 0,25 Hf = r = 6,31 x 10-7 Wr S N ; hp (57) dimana :
Wr = Berat rod string, lb S = Panjang stroke, in
penjumlahan hidraulic dan friction horse power. Untuk mengatasi tekanan yang tidak dapat diperkirakan dalam peralatan dipermukaan maka diambil faktor keselamatan sebesar 1,5 . Brake horse power dituliskan :
BHP = 1,5 (Hb + Hf) (1-58)
5.4. Penentuan Efisiensi Total Pompa
Sebagaimana dikemukakan diatas bahwa efisiensi total pompa adalah merupakan hasil kali dari dua efisiensi, yaitu efisiensi permukaan (above ground efficiency) dan efisiensi bawah permukaan (bellow ground efficiency). Above ground efficiecy yaitu efisiensi pompa yang berhubungan dengan keperluan horse power oleh prime mover dipermukaan, dan besarnya dinyatakan dengan perbandingan antara polished rod horse power terhadap power input pada prime mover (brake horse power). Secara matematis dapat dituliskan sebagai berikut : power horse Brake power horse rod Polished Efficiency Ground Above = =
Hp
BHP
PRHP
,
(59)Bellow ground efficiecy yaitu efisiensi yang berkaitan dengan perlatan bawah permukaan di dalam mengangkat fluida kepermukaan, besarnya efisiensi ini dinyatakan dengan perbandingan antara horse power terhadap polished rod horse power dan secara matematis dapat dituliskan sebagai berikut :
power
horse
Rod
Polish
power
horse
Hydraulic
Efficiency
Ground
Bellow
=
= ,Hp PRHP HHP (60)Sehingga besarnya efisiensi total pompa adalah :
Overall Efficiency = Above Ground Efficiency x Below Ground Efficiency
(Efisiensi total) (Efisiensi permukaan ) (Efisiensi bawah permukaan) = ,Hp PRHP HHP x BHP PRHP (61)
TEORI DASAR
POMPA ANGGUK (SUCKER ROD PUMP)
M A T E R I
1. PERALATAN POMPA SUCKER ROD 1.1. Peralatan Di Atas Permukaan 1.2. Peralatan Di Bawah Permukaan 2. PRINSIP KERJA POMPA SUCKER ROD
3. ANALISA PERHITUNGAN PERALATAN POMPA 3.1. Analisa Gerakan Pompa
3.2. Sucker Rod String
3.3. Effective Plunger Stroke 3.4. Kecepatan Pompa
3.5. Perhitungan Counterbalance 3.6. Perhitungan Torsi
4. KAPASITAS POMPA
5. EFISIENSI TOTAL POMPA SUCKER ROD 5.1. Beban Polished Rod
5.2. Hydraulic Horse Power 5.3. Brake Horse Power