BAB II
LANDASAN TEORI
2.1
PROGRAMMABLE LOGIC (PLC)
2.1.1 Definisi PLC
1. NEMA (National Electric Facturer Association-USA)
PLC adalah peralatan elektronik yang beroperasi secara digital yang menggunakan programmable memory untuk menyimpan instruksi dan menjalankan fungsi spesifik seperti logika, pewaktu, pencacah, fungsi aritmatika sebagai pengendali secara digital atau analog terhadap input output dalam berbagai tipe mesin dan proses tertentu.
2. Definisi yang lain dari PLC:
PLC adalah “Komputer industry khusus untuk mengawasi dan mengendalikan proses industry menggunakan bahasa pemrograman khusus untuk control industry, didesain untuk tahan terhadap lingkungan industry yang banyak gangguan (Noise, vibration, shock, temperature, humidity).
2.1.2 Sejarah PLC
PLC diperkenalkan pertama kali pada tahun 1969 oleh Modicon. Kemudian diikuti oleh perusahaan seperti Allan Breadly, General Electric, Siemens, dan Westinghouse. Sedangkan perusahaan di Jepang lebih mendominasi PLC skala mikro dengan harga yang lebih rendah seperti Mitsubishi, Omron, dan Toshiba. Sebelumnya banyak digunakan peralatan control sekuensial seperti Cam Shaft dan
Drum. Ketika relay mulai digunakan maka panel control dengan relay menjadi control sekuensial utama. Setelah transistor hadir maka solid state relay banyak digunakan pada proses control yang memerlukan kecepatan tinggi.
Sekarang system control sudah meluas sampai peralatan industry dan total dikombinasikan dengan control feedback seperti PID, dengan pemrosesan data dan system monitoring terpusat (Scada ataupun DCS).
PLC merupakan system yang dapat memanipulasi, mengeksekusi, dan atau memonitor keadaan proses pada laju yang amat cepat, dengan dasar data yang bisa diprogram dalam system berbasis mikroprosesor.
2.1.3 Bagian-bagian PLC
PLC adalah tipe system control yang memiliki bagian masukan, kontroler, dan bagian keluaran. Bagian masukan merupakan peralatan yang berfungsi mengirim sinyal seperti sensor, flow switch, tombol-tombol dan sebagainya. Kemudian oleh PLC dibentuk menjadi keputusan- keputusan yang bersifat logika yang selanjutnya disimpan dalam memori. Dari perubahan tersebut kemudian di proses oleh Central Processing Unit (CPU) dan ditransfer ke output sebagai input control dari suatu motor, solenoid valve, dan lain – lain. Dengan menggunakan PLC memungkinkan modifikasi suatu pengaturan tanpa melakukan perubahan jaringan kabel, yang diperlukan hanyalah mengubah program dalam PLC. Secara umum PLC mempunyai fungsi dasar sebagai berikut :
I N P U T O U T P U T CPU
PROG RAMM ING
Masing – masing blok terdapat hubungan dalam sistem kontrol. Sebagai pusatnya adalah CPU yang dibangun atas mikroprosesor, memori logika untuk menyimpan kontrol logika, memori variabel yang digunakan untuk perubahan fungsi pada memori, dan pencatu daya yang berfungsi memberikan catu daya ke prosesor dan memori. Kemudian blok input/output yang berfungsi membuat sinyal kontrol dari atau ke CPU dalam bentuk tegangan atau arus yang kemudian dihubungkan ke sensor.
2.1.4 Konfigurasi Sistem PLC
PLC secara keseluruhan dibentuk dari beberapa unit yaitu :
1. Power Supply : berfungsi memberikan catu daya pada PLC 2. Unit Pemroses ( Central Processing Unit )
3. Alat Pemrograman 4. Input Modul 5. Output Modul
2.1.4.1 Central Processing Unit ( CPU )
Central Processing Unit (CPU) merupakan otak atau jantung dari sistem. Bagian-bagian CPU antara lain: catu daya, memori tetap (fixed memory), memori yang dapat dirubah (variable memory), processor, baterai cadangan (backup battery). Memori tetap berisikan program yang merupakan sistem operasi dari PLC. Memori tetap, tersimpan pada ROM di dalam CPU. Memori ini di set oleh pembuat PLC dan tidak dapat dirubah oleh pengguna PLC. Variable Memory merupakan bagian PLC yang berisi perintah-perintah yang diprogram oleh pengguna. Register-register pada Variable Memory berubah isinya pada saat PLC beroperasi. Processor
merupakan bagian dari CPU PLC yang menerima, menganalisa, memproses dan mengirim informasi. Informasi yang dikirim atau diterima dalam bentuk pulsa digital.
2.1.4.2 Pemrograman PLC
Untuk memasukkan program kedalam PLC membutuhkan sebuah perangkat berupa console atau computer (notebook/laptop) yang dihubungkan dengan menggunakan link cable. Setiap PLC mempunyai karakteristik yang berbeda-beda baik dari segi software program, cara pemrograman, maupun link cablenya meskipun masih dalam satu pabrikan PLC.
Gambar dibawah ini adalah pemrograman PLC menggunakan console dan personal computer dengan software GX Developper Version 7 dari Mitsubhisi.
Gambar 2.2 Pemrograman PLC menggunakan console dan personal computer Pemrograman PLC dengan menggunakan console
2.1.4.3 Input Modul
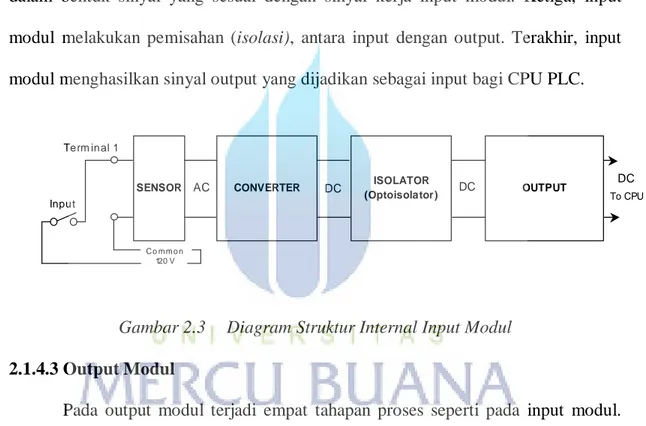
Secara garis besar blok diagram input modul ditunjukkan pada gambar 2.3 Pada input terjadi empat tahapan proses. Pertama, input modul melakukan sensing pada ada tidaknya sinyal masukan pada tiap – tiap terminal input. Adanya sinyal masukan menandakan switch, sensor atau sinyal lain pada proses yang dikontrol dalam keadaan on atau off. Kedua, input modul mengkonversi sinyal masukan ke dalam bentuk sinyal yang sesuai dengan sinyal kerja input modul. Ketiga, input modul melakukan pemisahan (isolasi), antara input dengan output. Terakhir, input modul menghasilkan sinyal output yang dijadikan sebagai input bagi CPU PLC.
Gambar 2.3 Diagram Struktur Internal Input Modul
2.1.4.3Output Modul
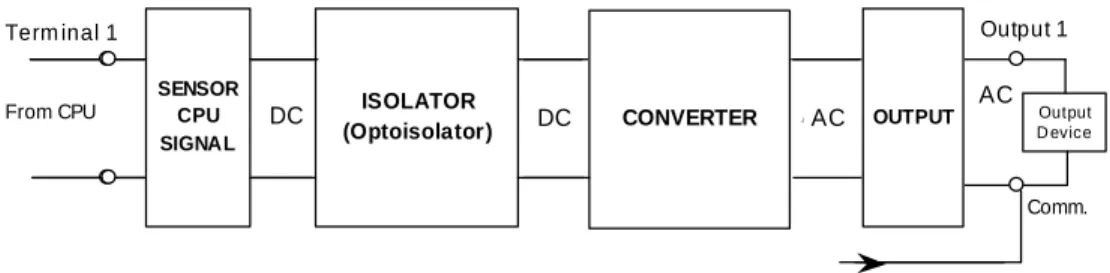
Pada output modul terjadi empat tahapan proses seperti pada input modul. Tahap pertama yaitu melakukan sensing pada ada tidaknya sinyal masukan dari CPU. Sinyal ini selanjutnya diisolasi pada bagian optoisolator pada tahap berikutnya. Hasil dari Optoisolator dikonversi pada converter menjadi sinyal AC (Alternating Current) atau DC (Dirrect Current). Gambar dibawah ini adalah blok diagram internal output module sebuah PLC.
SENSOR CONVERTER ISOLATOR OUTPUT
(Optoisolator) Co m m o n 120 V AC DC DC DC To CPU Term inal 1 Input
Gambar 2.4 Diagram Struktur Internal Output Modul
2.1.5 PLC Mitsubishi FX2N
PLC Mitsubhisi FX series adalah salah satu PLC mikro yang handal dan sudah umum digunakan dimesin-mesin industry kecil karena kemudahan dalam pemrograman, modul-modul pendukung yang lengkap, harga yang competitive dan bentuknya yang sederhana namun memiliki fitur lengkap. Ada 3 varian jenis PLC FX series yaitu FX1S, FX1N dan FX2N/FX2NC. Dari ketiga varian ini yang membedakan adalah type prosesor dan kapasitas memory, sedangkan dari output kontrolnya dibedakan 2 type yaitu type relay (MR) dan type transistor (MT).
Pada gambar 2.5 dibawah ini adalah salah satu contoh PLC Mitsubishi type FX2n-64MT yang nantinya akan digunakan untuk mesin inserting label.
Comm. SENSOR CPU SIGNAL OUTPUT CONVERTER ISOLATOR (Optoisolator) DC DC AC AC Term inal 1
From CPU Output
D evice
Output 1
DC DC AC
Term inal 1
Keterangan Gambar: A. DIN rail 35mm
B. Lubang alternative untuk mounting C. Terminal Input
D. Cover terminal input. E. Lampu indikator input
F. Cover untuk penambahan modul eksternal G. Lampu status indicator
H. Cover port untuk pemrograman J. Tutup panel atas
K. Terminal Output L. Cover terminal output M. Din rail clip
N. Lampu indicator output P. Batery back up
Q. Kabel battery back up R. Memory tambahan S. Run/stop switch T. Programming Port
Gambar 2.5 PLC Mitsubhisi FX2n Series
2.1.5.1Pengalamatan Input (X) dan Output (Y) pada PLC Mitsubishi
Perangkat input dan output digunakan untuk pertukaran data dari CPU PLC dengan peralatan luar. Peralatan input memberikan data logic ON atau OFF yang diberikan peralatan luar ke input modul. Data input digunakan sebagai kontak
Normally Open (NO) atau Normally Close (NC) dan sebagai sumber data bagi operasi program. Peralatan output digunakan untuk menghasilkan hasil operasi program dari output modul ke peralatan luar.
2.1.5.2Internal Relay ( M ), Latch Relay ( L ), State Relay ( S )
Internal Relay (M), Latch Relay (L) dan State Relay (S) merupakan relay bantu pada CPU. Relay ini digunakan sebagai pengganti relay elektrik di dalam CPU PLC dalam membuat rangkaian kontrol atau program.
2.1.5.3Timer ( T )
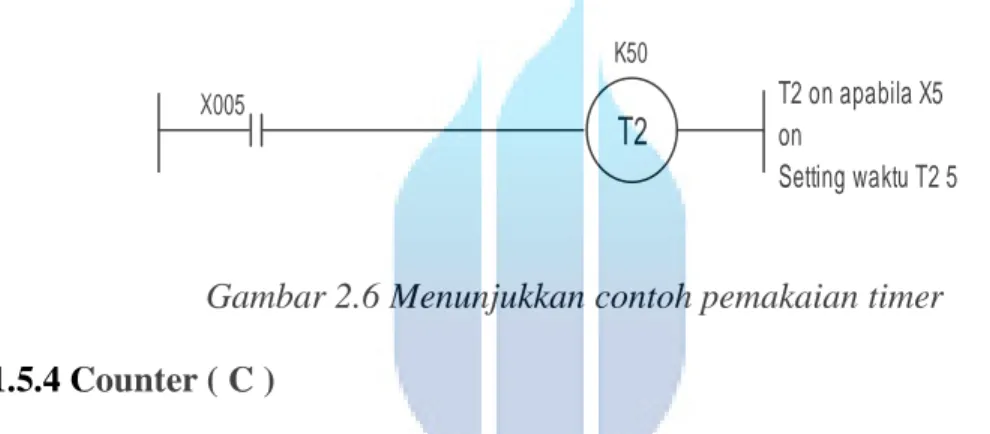
Timer mulai aktif apabila coilnya mulai diaktifkan. Kontak timer akan aktif menjadi close/open apabila timer sudah mencapai setting waktu. Apabila coil timer di off kan maka nilai waktu timer menjadi 0 dan kontak menjadi off.
Gambar 2.6 Menunjukkan contoh pemakaian timer
2.1.5.4Counter ( C )
Counter pada PLC melakukan penghitungan maju (upcount). Counter mulai melakukan penghitungan apabila coil diaktifkan. Setelah mencapai setting maka kontak counter menjadi on/off. Nilai terhitung pada counter akan tetap tersimpan sampai kontak reset (RST) counter diaktifkan. Reset mengubah nilai terhitung pada counter menjadi nol.
Gambar 2.7 Menunjukkan contoh pemakaian counter. X005 K50 T2 T2 on apabila X5 on Setting waktu T2 5 detik X005 C3
K2 Kontak C3 close setelah kontak X5 close 2 kali
2.1.5.5Bahasa Pemrograman PLC Mitsubishi
Pemrograman PLC Mitsubishi menggunakan software GX Development Versi 7. Ada 2 type bahasa pemrograman PLC Mitsubishi yaitu :
1. Bahasa symbol relay (ladder diagram) 2. Bahasa Sequential Function Chart (SFC)
2.1.5.5.1 Bahasa Simbol Relay ( ladder mode )
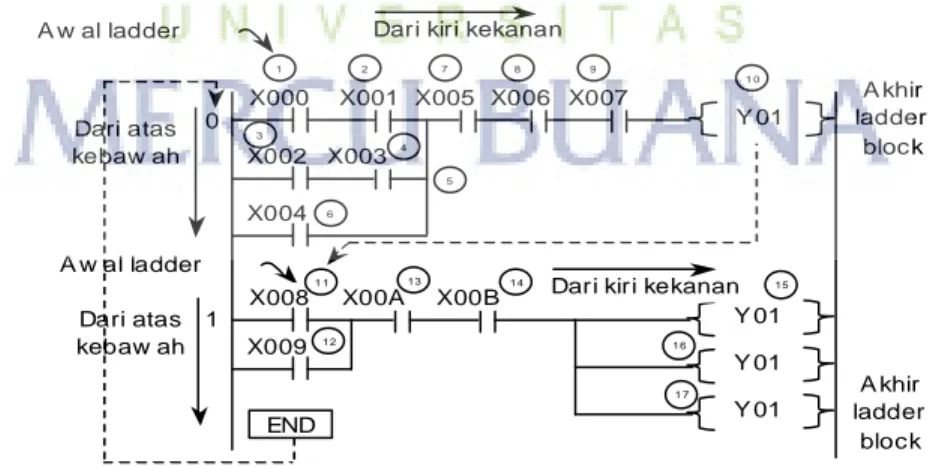
Metode bahasa symbol relay berdasarkan pada konsep prinsip kerja rangkaian kontrol relay elektrik. Operasi perintah yang terjadi sama seperti pada urutan ladder diagram rangkaian kontrol menggunakan relay elektrik. Pada metode ini terdapat ladder block yaitu bagian terkecil dari program berurut (sequence program. Tiap – tiap blok dimulai dari sisi kiri bus dan diakhiri pada sisi kanan bus. Dan operasi program berurut ( sequence program ) dilaksanakan secara berulang dimulai dari awal blok atau langkah 0 dan berakhir sampai pada instruksi END. Gambar 2.8 berikut ini menunjukkan urutan pelaksanaan program pada PLC.
Gambar 2.8 Urutan Eksekusi Program A w al ladder 1 X002 X000 0 Y 01 Y 01 Y 01 Y 01 X008 X009 X003 X00A X004 1 X001 X005 X006 X007 X00B 2 7 8 9 1 0 3 4 6 5 1 1 12 13 14 15 16 1 7 A khir ladder block A khir ladder block Dari kiri kekanan
Dari kiri kekanan
Dari atas kebaw ah Dari atas kebaw ah A w al ladder END
2.1.5.5.2 Bahasa Sequential Function Chart (SFC)
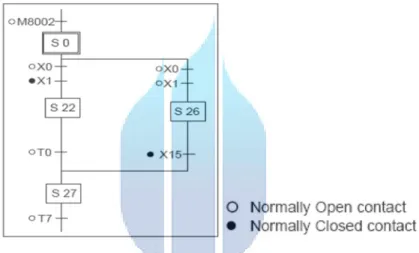
Bahasa Sequential Function Chart (SFC) adalah bahasa pemrograman yang mirip dengan flow chart sebuah proses namun ditulis dari atas ke bawah. Tiap chart ditulis dengan nomer yang identik. Tiap langkah program dari tiap chart diberi persyaratan sehingga program akan berjalan jika tiap persyaratan tersebut dipenuhi. Gambar 2.9 dibawah ini adalah pemrograman PLC dengan menggunakan Bahasa Sequential Function Chart (SFC)
Gambar 2.9 Pemrograman dengan Bahasa Sequential Function Chart
2.1.6 Instruksi Dasar Pemrograman PLC Mitsubishi
2.1.6.1Load (LD), Load Not (LDI)
Instruksi ini dipakai untuk mewakili satu kondisi logika untuk mengeluarkan satu output. Berfungsi sebagai kontak NO ( Normally Open ) untuk LD dan NC ( Normally Close ) untuk LDI. Instruksi dipakai pada saat memulai suatu ladder atau
ladder block.
2.1.6.2AND dan ANI
Instruksi ini dipakai untuk melakukan operasi AND atau AND NOT terhadap hasil dari operasi sebelumnya. Berfungsi sebagai kontak NO ( Normally Open ) untuk AND dan NC ( Normally Close ) untuk ANI.
Gambar 2.11 Ladder Diagram Instruksi AND
2.1.6.3OR dan ORI
Instruksi ini dipakai untuk melakukan operasi OR atau OR NOT membutuhkan salah satu dari beberapa kondisi logika untuk mengeluarkan output. Berfungsi sebagai kontak NO ( Normally Open ) untuk OR dan NC (Normally Close) untuk ORI.
Gambar 2.12 Ladder Diagram Instruksi ORI
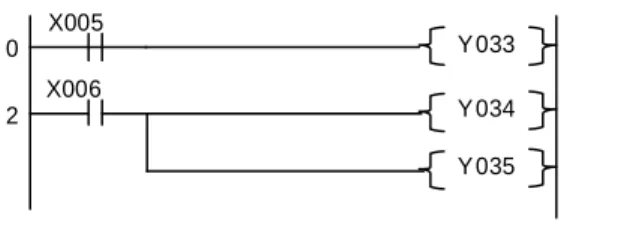
2.1.6.3OUT ( Y, L, S ), OUT ( T ) dan OUT ( C )
Perintah out ( Y, M, L, S ) digunakan untuk memberikan output dari hasil operasi dari program yang mendahului. Gambar 2.13 memberikan contoh penggunaan program out. Dari gambar dapat dilihat apabila X005 ON maka Y003 mengeluarkan output. Apabila X006 ON maka Y034 dan Y035 mengeluarkan output.
X001 X000
X001 X000
Gambar 2.13 Contoh Program Menggunakan OUT
2.1.7 MOTION CONTROL
Motion Control adalah pergerakkan dari sebuah benda dalam waktu yang spesifik dengan tingkat akurasi yang tinggi sehingga mempunyai karakteristik sebagai berikut:
1. Path : Posisi awal benda (home), posisi akhir benda, kecepatan, akselerasi dan deselerasi.
2. Performance : Akurasi, Repeatibility, dan stabilitas 3. Posisi : Berdasar absolute atau relative
Pada gambar 2.14 menunjukkan sebuah motion control yang sebuah motion control yang menggunakan controller sebuah PLC dan motor servo sebagai system penggerak dan mempunyai karakteristik yang terdiri dari:
Gambar 2.14 Menunjukkan sebuah motion control dibentuk
X006 X005 0 Y 033 Y 034 Y 035 2
1. Kontroler yang mengkoordinasikan pergerakkan, mampu menghitung referensi posisi awal dan akhir dan juga mampu mengontrol kecepatan. 2. Driver yang menyuplai energy listrik ke pengerak yaitu motor.
3. Motor yang mempunyai torsi.
4. Sensor posisi yang memberikan informasi kecepatan dan referensi posisi ke kontroler.
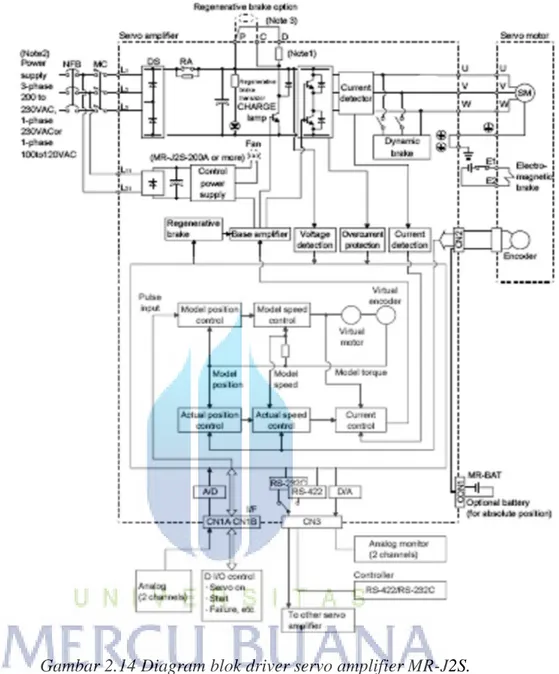
2.1.8 DRIVER SERVO MITSUBISHI MR-J2S
Driver servo Mitsubishi MR-J2S adalah salah satu seri dari driver servo yang mempunyai performance dan banyak fungsi karena mempunyai system komunikasi serial RS232 atau RS485 sehingga memudahkan dalam system konfigurasi dan setting parameter melalui personal computer dengan menggunakan software SETUP151E dan juga dapat bekerja dalam beberapa mode sekaligus yaitu:
1. Mode Kontrol Posisi karena mampu menghasilkan 500.000 pulsa per detik untuk mengontrol motor servo dengan kepresisian 131072 pulsa per revolution.
2. Mode Kontrol Kecepatan karena dengan tambahan parameter sebagai pengaturan kecepatan dengan tambahan analog speed control 0 sampai dengan 10 VDC. 3. Mode Kontrol Torsi karena dengan tambahan parameter sebagai pengaturan torsi
Gambar 2.14 Diagram blok driver servo amplifier MR-J2S.
1.1.9 Modul Kontrol Posisi FX2n-10GM
Modul control posisi FX2n-10GM adalah modul tambahan untuk PLC Mitsubishi series FX2n yang berfungsi sebagai modul control posisi, setting kecepatan, accelerasi, decelerasi, pengaturan torsi pada motor servo dengan integrasi dari data memori PLC. Dengan adanya modul ini akan memberikan kemudahan
pemrograman motion control servo dan akses yang luas dalam menjalankan motor servo.
Pengontrolan motor servo dengan modul ini yaitu dengan control pulsa. Banyaknya pulsa yang dikeluarkan akan mengontrol seberapa banyak derajat putar motor servo, dan seberapa besar frekuensi pulsa akan menentukan seberapa cepat motor servo tersebut berputar.
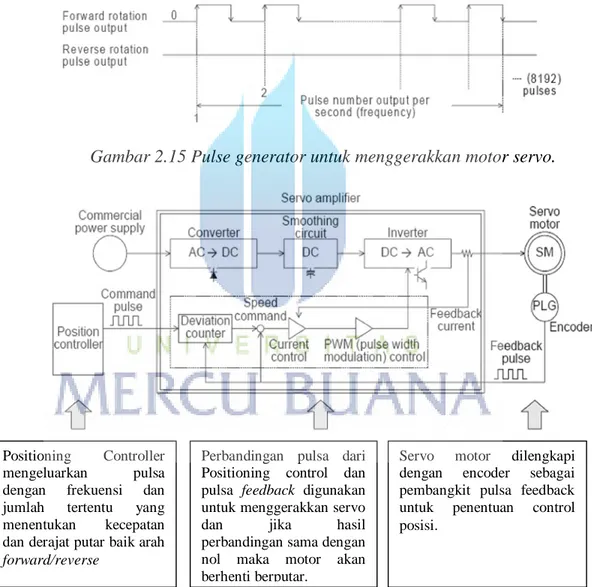
Gambar 2.15 Pulse generator untuk menggerakkan motor servo.
Gambar 2.16 Pengontrollan motor servo dengan pulse generator dan
feedback pulsa sebagai control posisi . Positioning Controller
mengeluarkan pulsa dengan frekuensi dan jumlah tertentu yang menentukan kecepatan dan derajat putar baik arah
forward/reverse
Perbandingan pulsa dari Positioning control dan pulsa feedback digunakan untuk menggerakkan servo
dan jika hasil
perbandingan sama dengan nol maka motor akan berhenti berputar.
Servo motor dilengkapi dengan encoder sebagai pembangkit pulsa feedback untuk penentuan control posisi.
Kontrol posisi FX2n-10GM dapat dijalankan langsung melalui personal computer dengan terlebih dahulu menginstal program FX-PCS-VPS/Win-E. Dengan program ini, maka parameter units servo, kecepatan, zero point, setting dan program dapat dibuat. Gambar 2.19 dibawah ini adalah setting servo dengan FX-PCS-VPS/Win-E.
Parameter Unit: System pengaturan unit berdasar motor atau mekanik. Dan unit yang digunakan dalam mm, derajat, inch.
Parameter Speed: System pengaturan kecepatan untuk JOG, waktu acc, waktu deg, dan max kecepatan.
Gambar 2.17 Setting motor servo dengan FX-PCS-VPS/Win-E.
Sedangkan contoh penulisan program pada FX2n-10GM dengan software FX-PCS-VPS/Win-E menggunakan flowchart seperti gambar dibawah ini:
Machine Zero: System pengaturan pembatas putaran motor jika dihubungkan dengan mekanik. Position Object: System pengaturan FX2n-10GM yang digunakan untuk penulisan ataupun pembacaan dengan internal memori PLC
Gambar 2.18 Pemrograman motor servo dengan FX-PCS-VPS/Win-E.
Inisialisasi program dimulai dengan “START”
Posisi encoder dibuat ke zero return
Waktu tunggu 2 detik Perintah jalan untuk servo X=80 dan Y=100
Nyalakan output Y0
Waktu tunggu 2 detik
Perintah jalan untuk servo X=110 dan Y=200
Perintah jalan untuk servo X=200
Perintah jalan untuk servo X=200 dan Y=100 dengan bentuk kurva
Perintah jalan untuk servo X=150
Matikan output Y0
Waktu tunggu 2 detik Perintah jalan untuk servo Y=70
Akhiri program dengan “END”
2.2 Human Machine Interface (HMI)
Sistem control dengan menggunakan PLC adalah belum lengkap tanpa menggunakan HMI (Human machine Interface). HMI sendiri adalah suatu antarmuka yang berbentuk monitor yang dapat menghubungkan bahasa manusia dengan bahasa mesin. Dengan bantuan HMI seorang operator dapat dengan mudah melihat atau mengubah nilai parameter maupun forcing program di PLC tanpa perlu mengubah logika program yang tersimpan di PLC.
Fungsi lain HMI adalah menggantikan tombol-tombol di panel, memberikan informasi kondisi mesin (monitoring), penunjukan alarm mesin (Alarm display), pengumpulan data (data logging), informasi (history machine), maupun akses system keamanan (security). Selain beberapa macam fungsi diatas masih banyak lagi fungsi lainnya yaitu penyederhanaan program PLC dan mengurangi kebutuhan jumlah input maupun output di PLC.
Dalam pemrograman HMI ada beberapa langkah yang harus diikuti yaitu: 1. System parameter.
System parameter digunakan untuk konfigurasi awal pembuatan program di PC sebelum didownload ke HMI. Ada beberapa hal yang harus diinisialisasi meliputi type komunikasi HMI ke PLC, jenis PLC, akses password, akses screen di HMI, dan sebagainya.
2. Tampilan screen di HMI.
Setelah parameter dibuat maka tampilan screen di HMI dapat mulai dikerjakan. Ada dua macam tampilan yaitu static (diam) dan dynamic. Statik merupakan gambar diam yang berformat BMP atau JPEG dan berfungsi
sebagai latar dari tampilan seperti gambar mesin, orang, catatan keterangan, dan sebagainya. Sedangkan dynamic adalah gambar yang diambil dari toolbar program HMI seperti gambar tombol, switch, pushbutton, bargraf, lampu, tank, motor, numeric atau string entry atau display, dan masih banyak lagi.
3. Menghubungkan display dengan memori register PLC.
Pada parameter dynamic display diisi dengan memori register/pengalamatan di PLC. Pada memori register di PLC ada dua macam register yaitu only read
dan read and write, sedangkan formatnya dalam bentuk bit, word, integer, real, unreal, string tergantung jenis register.
Pada mesin inserting label ini penulis gunakan HMI EasyView type MT508S yaitu type touch screen, warna, ukuran 8 inchi. Software yang digunakan EB500 dan untuk pembuatan tampilan screen menggunakan EasyBuilder. Sedangkan status memory register pada PLC FX2n adalah sebagai berikut:
1. Only Read : Hanya input (X)
2. Read and Write : Data register (D), Internal relay (M) dsb.
2.3 Inverter
Pengertian Inverter (Variable Speed Motor Driver ) adalah suatu alat atau rangkaian elektronik yang berfungsi untuk mengatur kecepatan dari sebuah motor induksi tiga phasa dengan cara mengatur frekuensi tegangan yang dihasilkan lewat rangkaian inverter. Dalam pembuatan mesin inserting label ini penulis banyak menggunakan inverter produk Mitsubishi.
Dari teori elektronika inverter adalah rangkaian yang merubah besaran listrik AC ( bolak – balik ) 50 Hz baik 1 phasa maupun 3 phasa ke besaran listrik DC ( searah ) dan dirubah lagi ke besaran listrik AC ( bolak – balik ) 3 phasa dengan frekwensi yang dapat diatur / dirubah sesuai dengan permintaan dari 0 Hz sampai 400 Hz, untuk menggerakkan motor induksi 3 phasa. Perubahan frekwensi berbanding lurus dengan kecepatan motor. Secara garis besar rangkaian inverter terbagi dalam beberapa blok :
Gambar 2.19 Skema Blok Inverter
1. Penyearah dan switching power supply merupakan rangkaian penyearah terdiri dari dioda bridge 3 phasa dan kapasitor elektrolit untuk mensupply tegangan DC ke blok rangkaian final driver, tegangan DC ini sesuai dengan tegangan inputnya. Untuk output switching power supply adalah 5 Volt DC, +12 dan –12 Volt DC untuk mensupply rangkaian CPU dan control unit.
2. CPU dan control unit, rangkaian control elektrolit yang terdiri dari rangkaian I/O dan terminalnya, microprocessor, program memory, display tampilan
Input AC 1 phas a/ 3 phas a PENYEARAH DAN SW ITCHING POW ER SUPPLY CPU CONTROL UNIT FINAL DRIVER
I/O / Control Unit
yang didalamnya sudah berisi parameter – parameter / instruksi untuk mengaktifkan inverter.
3. Final driver, blok ini merupakan rangkaian penguat akhir dari inverter yang menggunakan rangkaian transistor yang dibuat dalam satu modul amplifier.
Gambar 2.20 Modul Amplifier Final Driver
Perkembangan dunia industri sekarang ini sangat banyak pemakaian inverter untuk penerapan dalam automatisasi mesin karena beberapa kelebihan yang di punyai inverter diantaranya untuk mengatur kecepatan motor yang berhubungan dengan biaya pemakaian KWh meter, karena termasuk dalam energy saving. Apabila putaran motor dibawah 50 Hz maka pemakaian listriknya juga akan lebih hemat apabila memakai langsung motor tiga phasa tanpa inverter, dan didalam inverter sendiri sudah diberikan beberapa fasilitas untuk melindungi kesalahan yang terjadi saat pengoperasian, misalnya over current, over voltage, under voltage, overload, ini semua sangat melindungi komponen yang digunakan.
2.4 Motor Induksi Tiga Phasa
Secara umum motor listrik berfungsi untuk mengubah energi listrik menjadi energi mekanik yang berupa tenaga putar. Motor induksi tiga phasa ini banyak sekali dipakai dikalangan industri saat ini berkaitan dengan beberapa keuntungan dan kerugian diantaranya:
Keuntungan:
1. Sangat sederhana dan daya tahan kuat (konstruksi hampir tidak pernah terjadi kerusakan).
2. Harga relatif lebih murah dan perawatan sederhana
3. Efisiensi tinggi, pada kondisi berputar normal, tidak dibutuhkan sikat dan karenanya rugi daya yang diakibatkannya dapat dikurangi.
4. Tidak memerlukan starting tambahan untuk daya yang rendah / beban rendah dan tidak harus sinkron.
Kerugian:
1. Kecepatan tidak bisa berubah tanpa pengorbanan efisiensi, dengan kata lain untuk dapat merubah kecepatan dihubungkan sebuah driver atau inverter.
2.7.1 Konstruksi Motor Induksi Tiga Phasa
Prinsip dasar motor induksi terdiri dari bagian stator dan bagian rotor. Pada bagian stator terdapat beberapa slot / kutub yang merupakan tempat kawat (konduktor) dari kumparan tiga phasa yang disebut kumparan stator yang masing – masing kumparan mendapat supply arus tiga phasa yang menyebabkan kumparan akan timbul fluks magnet putar, karena adanya fluks
magnet putar pada kumparan stator, mengakibatkan rotor berputar karena adanya induksi magnet dengan kecepatan putar rotorsinkron. Dimana kecepatan stator pada motor didapat dari rumus:
Ns = 120 . F P
Ns = Kecepatan putar motor (rpm) F = Frekwensi jala – jala (Hz) P = Jumlah kutub
Dilihat dari rumus diatas maka kecepatan motor tergantung pada banyaknya kutub dan frekwensi yang dipakai dalam jala – jala. Untuk merubah arah putaran motor dapat dilakukan dengan merubah / membalik salah satu phasa yang masuk ke motor.
Sedangkan bagian rotor adalah bagian yang bergerak atau berputar karena adanya induksi magnet dari kumparan stator. Hampir 90 % dari kumparan rotor motor induksi kebanyakan memakai jenis squirrel – cage rotor, ini karena bentuk kumparannya sederhana dan tahan terhadap goncangan, tanda khusus dari rotor ini adalah ujung – ujung kumparan rotor terhubung singkat secara permanent.