Mengapa harus TRUE-RMS ?
oyunlar
Beban non linier memerlukan alat ukur dengan fitur true-rms agar dapat membaca sinyal dengan akurat
Root Mean Square
Berbeda dengan sinyal DC yang memiliki nilai aktual tetap, sinyal AC memiliki nilai aktual yang terus berubah secara periodik. Pengukuran sinyal AC dilakukan dengan mencari nilai ekuivalen DC nya, nilai ekuivalen tersebut dikenal dengan istilah nilai RMS atau nilai efektif. Dalam terminologi elektrik, nilai RMS AC akan ekuivalen dengan DC heating value nya.
Mayoritas alat ukur yang saat ini beredar dipasaran adalah alat ukur berteknologi MEAN (Averaging Rectified). Metode MEAN sangat populer digunakan karena memiliki prosedur kalkulasi yang lebih mudah dan ekonomis. Pada sinyal yang berbentuk sinus murni, nilai dari MEAN akan mirip dengan nilai RMS sehingga “dapat dikatakan” bernilai sama. Pada pengukuran sinyal sinus murni yang memiliki nilai puncak 1 V (gambar 1), terlihat bahwa nilai 0,6366 (MEAN) mendekati nilai 0,7071 (RMS). Alat ukur berbasis MEAN akan menampilkan nilai yang didapatkan dari hasil penghitungan MEAN yang kemudian dikalikan dengan bilangan 1,11. Nilai hasil perkalian inilah yang akan tampil pada display alat ukur.
Ketika signal tak lagi berbentuk sinus...
Sebagian besar peralatan elektronik modern menggunakan sumber tegangan AC yang telah disearahkan. Beban ini sering dikenal dengan istilah beban linier. Beban non-linier memiliki karakteristik dimana sinyal arus yang ditarik dari jala-jala PLN tidak lagi proporsional terhadap sinyal sinus tegangan dan mengalami distorsi (gambar 2b), bandingkan dengan gambar 2a. Pada perkembangannya, ekspansi beban non linier telah merambah ke dunia industri seiring dengan maraknya penggunaan inverter dan switching power supply. Bentuk sinyal output dari inverter pun tak lagi berbentuk sinus, melainkan berupa rangkaian sinyal square seperti gambar 2c. Dengan kondisi tersebut, proses trouble shooting akan menghadapi masalah bila kita tidak menggunakan alat ukur yang
tepat. Kesalahan dalam pemilihan alat ukur dapat mengakibatkan ketidakakuratan hasil pengukuran. Untuk itulah diperlukan alat ukur yang mampu membaca nilai RMS pada semua kondisi sinyal tanpa terkecuali.
Masih relevankah MEAN dengan RMS untuk kondisi kelistrikan sekarang....? Alat ukur berbasis MEAN dirancang untuk menghitung nilai pendekatan terhadap nilai RMS pada beban-beban linier seperti motor induksi, heater dan lampu pijar. Beban linier akan memiliki pola arus yang berbentuk sinus sehingga hasil pembacaan alat ukur akan mendekati nilai RMS sinyal. Namun, metode MEAN tidak akan akurat bila diaplikasikan pada beban-beban non linier, mengapa? Jawabannya sederhana, beban non linier memiliki pola gelombang arus yang tak lagi berbentuk sinus. Bila beban non linier di ukur dengan alat ukur berteknologi MEAN, maka hasil pembacaan akan jauh lebih kecil. Beberapa sumber menyatakan bahwa penyimpangan nilai yang terbaca dapat mencapai hingga 40% lebih rendah daripada nilai RMS yang sebenarnya.
Kenapa harus terbaca dalam RMS ?
Komponen-komponen dalam sistem elektrik seperti fuse, circuit breaker, bus bar dan sebagainya diratifikasi dalam arus RMS. Ratifikasi tersebut berhubungan dengan aspek daya tahan terutama terhadap disipasi panas. Misalnya, kita akan melakukan pengecekan overloading pada jalur elektrik. Maka kita harus mengetahui terlebih dahulu berapa nilai rms arus yang mengalir pada jalur tersebut. Hasil pengukuran kemudian kita bandingkan dengan nilai ratifikasi (rated value) yang biasanya tertera pada label. Bila ternyata arus
yang mengalir terdeteksi lebih besar dari batas ratifikasi, maka dapat disimpulkan jalur tersebut overload. Proses pembandingan ini tidak akan menjadi masalah bila saat melakukan pengukuran, kita menggunakan clamp berfitur true rms. Clamp true rms memiliki kemampuan dalam melakukan kalkulasi heating value sesuai formula rms. Artinya, seperti apapun bentuk sinyal arus tidak akan mempengaruhi pembacaan nilai rms. Tapi pengukuran akan menimbulkan masalah baru jika kita melakukannya dengan menggunakan alat ukur berbasis MEAN. Alat ukur berteknologi MEAN akan memberikan nilai pembacaan dengan margin error hingga mencapai 40 % lebih rendah, tergantung dari jenis sinyalnya. Dapat kita bayangkan bila sebuah bus bar dengan batas ratifikasi 1000 A rms dialiri arus yang terdistorsi dan terdeteksi oleh clamp MEAN dengan nilai 800 A. Maka nilai rms arus sebenarnya mengalir pada bus bar tersebut dapat mencapai diatas1000A.
- See more at: http://www.tridinamika.com/news/news-details/mengapa-harus-true-rms#sthash.GUXXB0Ma.dpuf
Bagian ini menjelaskan tentang bagaimana mengkaji kinerja motor listrik. 1 Efisiensi motor lisrik
Motor mengubah energi listrik menjadi energi mekanik untuk melayani beban tertentu. Pada proses ini, kehilangan energi ditunjukkan dalam Gambar 11.
Efisiensi motor ditentukan oleh kehilangan dasar yang dapat dikurangi hanya oleh perubahan pada rancangan motor dan kondisi operasi. Kehilangan dapat bervariasi dari kurang lebih dua persen hingga 20 persen. Tabel 1 memperlihatkan jenis kehilangan untuk motor induksi.
Efisiensi motor dapat didefinisikan sebagai “perbandingan keluaran daya motor yang dirgunakan terhadap keluaran daya totalnya.”
Faktor-faktor yang mempengaruhi efisiensi adalah: · Usia. Motor baru lebih efisien.
· Kapastas. Sebagaimana pada hampir kebanyakan peralatan, efisiensi motor meningkat dengan laju kapasitasnya.
· Kecepatan. Motor dengan kecepatan yang lebih tinggi biasanya lebih efisien.
· Jenis. Sebagai contoh, motor kandang tupai biasanya lebih efisien daripada motor cincin-geser
· Suhu. Motor yang didinginkan oleh fan dan tertutup total (TEFC) lebih efisien daripada motor screen protected drip-proof (SPDP)
· Penggulungan ulang motor dapat mengakibatkan penurunan efisiensi · Beban, seperti yang dijelaskan dibawah
Terdapat hubungan yang jelas antara efisiensi motor dan beban. Pabrik motor membuat rancangan motor untuk beroperasi pada beban 50-100% dan akan paling efisien pada beban 75%. Tetapi, jika beban turun dibawah 50% efisiensi turun dengan cepat seperti
ditunjukkan pada Gambar 11. Mengoperasikan motor dibawah laju beban 50% memiliki dampak pada faktor dayanya. Efisiensi motor yang tinggi dan faktor daya yang mendekati 1 sangat diinginkan untuk operasi yang efisien dan untuk menjaga biaya rendah untuk seluruh pabrik, tidak hanya untuk motor. Untuk alasan ini maka dalam mengkaji kinerja motor akan bermanfaat bila menentukan
beban dan efisiensinya. Pada hampir kebanyakan negara, merupakan persyaratan bagi fihak pembuat untuk menuliskan efisiensi beban penuh pada pelat label motor. Namun demikian, bila motor beroperasi untuk waktu yang cukup lama, kadang-kadang tidak mungkin untuk mengetahui efisiensi tersebut sebab pelat label motor kadangkala sudah hilang atau sudah dicat.
Untuk mengukur efisiensi motor, maka motor harus dilepaskan sambungannya dari beban dan dibiarkan untuk melalui serangkaian uji. Hasil dari uji tersebut kemudian dibandingkan dengan grafik kinerja standar yang diberikan oleh pembuatnya.
Jika tidak memungkikan untuk memutuskan sambungan motor dari beban, perkiraan nilai efisiensi didapat dari tabel khusus untuk nilai efisiesi motor. Nilai efisiensi disediakan
untuk:
· Motor dengan efisiesi standar 900, 1200, 1800 dan 3600 rpm · Motor yang berukuran antara 10 hingga 300 HP
· Dua jenis motor: motor anti menetes terbuka/ open drip-proof (ODP) dan motor yang didinginkan oleh fan dan tertutup total/ enclosed fan-cooled motor (TEFC)
· Tingkat beban 25%, 50%, 75% dan 100%. 1. Mengapa mengkaji beban motor
Karena sulit untuk mengkaji efisiensi motor pada kondisi operasi yang normal, beban motor dapat diukur sebagai indikator efisiensi motor. Dengan meningkatnya beban, faktor daya dan efisinsi motor bertambah sampai nilai optimumnya pada sekitar beban penuh. 2. Bagaimana mengkaji beban motor
Persamaan berikut digunakan untuk menentukan beban:
Dimana,
η = Efisiensi operasi motor dalam % HP = Nameplate untuk Hp
Beban = Daya yang keluar sebagai % laju daya Pi = Daya tiga fase dalam kW
Survei beban motor dilakukan untuk mengukur beban operasi berbagai motor di seluruh pabrik. Hasilnya digunakan untuk mengidentifikasi motor yang terlalu kecil.
(mengakibatkan motor terbakar) atau terlalu besar (mengakibatkan ketidak efisiensian). US DOE merekomendasikan untuk melakukan survei beban motor yang beroperasi lebih dari 1000 jam per tahun. Terdapat tiga metode untuk menentukan beban motor bagi motor yang beroperasi secara individu:
· Pengukuran daya masuk. Metode ini menghitung beban sebagai perbandingan antara daya masuk (diukur dengan alat analisis daya) dan nilai daya pada pembebanan 100%.
· Pengukurann jalur arus. Beban ditentukan dengan membandingkan amper terukur (diukur dengan alat analisis daya) dengan laju amper. Metode ini digunakan bila faktor daya tidak dketahui dan hanya nilai amper yang tersedia. Juga direkomendasikan untuk menggunakan metode ini bila persen pembebanan kurang dari 50%
· Metode Slip. Beban ditentukan dengan membandingkan slip yang terukur bila motor beroperasi dengan slip untuk motor dengan beban penuh. Ketelitian metode ini terbatas namun dapat dilakukan dengan hanya penggunaan tachometer (tidak diperlukan alat analisis daya).
Karena pengukuran daya masuk merupakan metode yang paling umum digunakan, maka hanya metode ini yang dijelaskan untuk motor tiga fase.
3. Pengukuran daya masuk Beban diukur dalam tiga tahap.
Tahap 1. Menentukan daya masuk dengan menggunakan persamaan berikut:
Dimana:
Pi = Daya tiga fase dalam kW
V = RMS (akar kwadrat rata-rata) tegangan, nilai tengah garis ke garis 3 fase I = RMS arus, nilai tengah 3 fase
PF = Faktor daya dalam desimal
Alat analisis daya dapat mengukur nilai daya secara langsung. Industri yang tidak memiliki alat analisis daya dapat menggunakan multi-meters atau tong-testers untuk mengukur tegangan, arus dan faktor daya untuk menghitung daya yang masuk.
Tahap 2. Menentukan nilai daya dengan mengambil nilai pelat nama/nameplate atau dengan menggunakan persamaan sebagai berikut:
Dimana :
Pr = Daya masuk pada beban penuh dalam kW HP = Nilai Hp pada nameplate
Ηr = Efisiensi pada beban penuh (nilai pada nameplate atau dari tabel efisiensi motor)
Dimana :
Beban = Daya keluar yang dinyatakan dalam % nilai daya Pi = Daya tiga fase terukur dalam kW
Pr = Daya masuk pada beban penuh dalam kW 3.2.4 Contoh
Pertanyaan:
Pengamatan terhadap pengukuran daya berikut dilakukan untuk motor induksi tiga fase 45 kW dengan efisiensi beban penuh 88%.
· I = 37 Amp · PF = 0.81 Hitung beban. Jawab: · Daya Masuk = (1,732 x 418 x 37 x 0,81)/1000 = 21,70 kW % Pembebanan = [21,70 /(45/0,88)] x 100 = 42,44 %
Menghitung Arus, Daya, Kecepatan, dan Torsi
Motor Listrik AC
Motor listrik adalah suatu perangkat elektromagnetik yang digunakan untuk mengkonversi atau mengubah energi listrik menjadi energi
mekanik. Hasil konversi ini atau energi mekanik ini bisa digunakan untuk berbagai macam keperluan seperti digunakan untuk memompa suatu cairan dari satu tempat ke tempat yang lain pada mesin pompa, untuk meniup udara pada blower, digunakan sebagai kipas angin, dan keperluan – keperluan yang lain. Berdasarkan jenis dan karakteristik arus listrik yang masuk dan mekanisme operasinya motor listrik dibedakan menjadi 2, yaitu motor AC, dan motor DC. Namun pada artikel kali ini kita akan membahas sedikit tentang motor AC, beserta cara menghitung arus, daya, dan kecepatan pada motor tersebut.
Ada 2 jenis motor pada motor AC, yaitu :
1. Motor sinkron, yaitu motor AC (arus bolak-balik) yang bekerja pada
kecepatan tetap atau konstan pada frekuensi tertentu. Kecepatan putaran motor sinkron tidak akan berkurang(tidak slip) meskipun beban
bertambah, namun kekurangan motor ini adalah tidak dapat menstart sendiri. Motor ini membutuhkan arus searah (DC) yang dihubungkan ke rotor untuk menghasilkan medan magnet rotor. Motor ini disebut motor sinkron karena kutup medan rotor mendapat tarikan dari kutup medan putar stator hingga turut berputar dengan kecepatan yang sama
(sinkron).
2. Motor induksi, yaitu motor AC yang paling umum digunakan di industri –
industri. Pada motor DC arus listrik dihubungkan secara langsung ke rotor melalui sikat-sikat(brushes) dan komutator(commutator). Jadi kita bisa mengatakan motor DC adalah motor konduksi. Sedangkan pada motor AC, rotor tidak menerima sumber listrik secara konduksi tapi dengan induksi. Oleh karena itu motor AC jenis ini disebut juga sebagai motor induksi. Mungkin sudah cukup penjelasan dan pengertian singkat tentang motor listrik. Dan selanjutnya akan dijelaskan sedikit tentang rumus-rumus dasar perhitungan pada motor. seperti menghitung arus/ampere motor,
menghitung kecepatan motor, menghitung daya/beban motor, dan lain-lain.
Rumus menghitung kecepatan sinkron, jika yang diketahui frekuensi dan jumlah kutup pada motor AC.
Contoh : hitung kecepatan putar motor 4 poles/kutup jika motor dioperasikan dengan frekuensi 50 hz.
ns = (120. F)/ P = (120 . 50)/ 4 = 1500 rpm menghitung slip pada motor
Contoh : hitung slip motor jika diketahui kecepatan motor 1420 rpm. Dengan kecepatan sinkron yang sama dengan hasil diatas.
% slip = ((ns - n)/ ns) x 100 = ((1500 - 1420)/ 1500)x 100 = 5 % Menghitung arus/ampere motor ketika diketahui daya(watt), tegangan(volt), dan faktor daya(cos φ).
Contoh. Hitung besarnya arus(ampere) motor dengan daya 1 kw dan tegangan 220V dengan faktor daya 0,88.
I = P / V. Cos φ...P = 1 kw = 1000 watt I = 1000/(220 . 0,88) = 5 Ampere
Menghitung daya motor 3 phasa ketika diketahui arus, tegangan, dan faktor daya.
Contoh. Hitung daya motor induksi 3 phasa yang memiliki arus 9,5 A dengan tegangan 380V dan faktor daya/ cos φ 0,88.
P = √3 .V. I . cos φ = 1,73 . 380 . 9,5 . 0,88 = 5495 watt atau dibulatkan jadi 5,5 KW.
Menghitung daya output motor P output = √3 .V. I . eff . cos φ
Contoh. Hitung daya output motor jika diketahui seperti data diatas dengan efisiensi motor 90 % .
P output = √3 .V. I . eff . cos φ = 1,73 . 380 . 9,5 . 0,9 . 0,88 = 4946 watt atau dibulatkan jadi 5 KW atau 6,6 HP
Menghitung efisiensi daya motor
Contoh. Dengan daya input motor 5 KW dan daya output 4,5 KW. Hitung efisiensi daya pada motor tersebut.
ᶯ
= (Pout / P)x 100% = (4500/5000)x 100% = 90 % Menghitung daya semu motor (VA)Pada motor 1 phasa S (VA) = V . I
Pada motor 3 phasa S = √3 . V . I
Menghitung torsi motor jika diketahui daya motor dan kecepatan motor.
Hubungan antara horse power, torsi dan kecepatan.
T = (5250 . HP)/n = (5250 . 10)/ 1500 = 35 lb ft = 45,6 Nm Menghitung torsi motor
1. T = F . D
Dimana :
T = torsi motor (dalam lb ft) F = gaya (pon) D = jarak (ft) 2. T = F . D Dimana : T = torsi motor (Nm) F = gaya (Newton) D = jarak (meter) 1 lb ft = 0,1383 kgm =1,305 Nm 1 kgm = 7,233 lb ft = 9,807 Nm
Mengukur Ampere Motor Listrik
Sebelum mulai belajar mengukur ampere motor listrik, anda harus tahu, apa sih tujuan mengukur ampere / arus motor listrik itu? Perlu anda ketahui, semua peralatan listrik itu mempunyai life time. Namun ada beberapa hal atau sebab yang bisa memperpendek life time atau umur dari peralatan listrik tersebut. Oleh karena itu perlunya perawatan dan pengawasan secara berkala untuk memperpanjang umur dari peralatan listrik tersebut. Begitu juga dengan motor listrik, tidak selamanya akan beroperasi dengan normal, adakalanya motor listrik akan mengalami kerusakan, baik itu kerusakan berat atau ringan. Dan dengan mengukur arus atau ampere yang mengalir pada motor, akan dapat diketahui motor tersebut dalam keadaan normal, atau tidak normal. Dari hasil pengukuran ini, akan dilakukan pengecekan pada motor yang beroperasi dengan arus yang tidak normal. Sehingga kerusakan motor pun dapat dicegah atau dihindari.
Untuk mengetahui atau mengukur arus listrik(ampere) yang mengalir pada beban, bisa digunakan alat ukur ampere meter yang dipasang secara seri. Namun pengukurannya akan menyulitkan dan mengganggu pengoperasian motor atau mesin, karena dalam pemasangannya
diperlukan penyambungan dengan rangkaian. Pengukuran dengan
ampere meter ini lebih cocok bila alat ukurnya dipakai secara permanen pada rangkaian tersebut. Dan untuk pengukuran yang lebih mudah dan lebih flexible akan lebih baik pengukurannya menggunakan clamp meter atau yang biasa disebut tang ampere. karena penggunaan tang ampere ini lebih mudah disesuaikan dalam melakukan pengukurannya, dan tanpa mengganggu rangkaian tersebut.
Berikut ini contoh cara menggunakan tang ampere untuk mengukur arus beban motor listrik 3 fasa.
1. Putar selector switch pada skala ampere, lihat kapasitas ampere pada
MCB atau pada beban untuk menghindari ampere beban lebih besar dari skala ampere pada alat ukur. (ingat : arus beban yang lebih tinggi dari skala alat ukur dapat merusak alat ukur).
2. Pasang tang ampere pada salah satu kabel fasa tersebut. Lihat seperti
pada gambar 2 diatas. pengambilan kabel pengukuran bisa setelah kontaktor dan OCR(over current relay) ataupun sebelum kontaktor. Anda
bisa juga mengukurnya dari sebelum MCB asalkan tidak ada percabangan beban(pararel).
3. Angka hasil pengukuran arus akan keluar di monitor tang ampere.
Gambar nomor 3.
4. Ukur semua atau ketiga kabel fasa tersebut (R, S, T).
Dari hasil pengukuran RST tersebut batas toleransi perbedaan antar fasa adalah +0,5 A ~ -0,5A . Jika perbedaan hasil pengukuran antar fasa lebih besar dari itu, maka perlu pengecekan lebih lanjut karena hal itu juga merupakan abnormal. Hal ini terjadi akibat beberapa sebab, seperti:
- Tegangan listrik RST tidak seimbang, bisa juga disebabkan dari kontaktor,
kabel, MCB, ataupun memang dari sumber PLN.
- Isolasi belitan motor yang sudah jelek, mungkin disebabkan karena sudah
lewat lifetime, panas, dan lain-lain.
- Hambatan atau impedansi(Z) dari belitan motor yang tidak seimbang.
Jika dari hasil pengukuran arus atau ampere lebih tinggi dari arus nominal yang tertera pada nameplate motor. maka dalam kondisi ini akan sangat berbahaya atau mengancam motor, karena hal ini menyebabkan panas yang bisa berakibat kebakaran pada belitan motor. Kebanyakan hal seperti ini terjadi karena :
- Bearing seret atau aus, hal ini kemungkinan disebabkan karena; life time,
panas, kopling beban tidak center, impeller tidak ballance, dan lain-lain. - Beban terlalu berat (overload), disebabkan karena,
jammed/macet/menyumbat, daya motor terlalu kecil (salah pilih motor), - Phase loss(hilangnya salah satu fasa), kebanyakan hal ini terjadi karena
rusaknya kontak utama pada kontaktor, namun biasanya juga terjadi karena diakibatkan dari sumber PLN yang terputus. Memang sebab ampere motor naik karena phase losses jarang terjadi namun phase loss inilah yang sangat berbahaya pada motor, karena kerusakan motor yang disebabkan hilangnya salah satu tegangan fasa ini(phase loss) tidak bisa diperkirakan/diduga oleh mekanik. Ketika salah satu tegangan fasa hilang maka dengan seketika ampere motor akan naik dengan drastis, dan
dengan seketika pula belitan motor akan terbakar/terputus. Maka dari itu pentingnya sebuah pengaman motor, seperti OCR(Over Current relay) untuk mematikan sistem instalasi motor jika terjadi over current/arus lebih.
Untuk mengetahui apa yang menyebabkan arus atau ampere yang begitu tinggi, maka diperlukan pengecekan satu-persatu. Berikut ini adalah
langkah-langkah yang harus diambil bila hasil pengukuran ampere motor abnormal (ampere tinggi /over current):
1. Matikan motor atau mesin, matikan juga MCB motor tersebut demi
keselamatan.
2. Cek sumber tegangan RST yang masuk ke motor,(gunakan ohm meter
untuk mengetahui kondisi kontaktor, kabel, dan motor), jika tidak ada masalah dengan sumber tegangan motor, dan motor, lanjutkan dengan mengecek sebab-sebab mekanis,
3. Lepaskan motor dari beban (seperti; mesin, impeller, pompa, kompresor,
atau beban-beban motor lainnya).
4. Jalankan motor tanpa beban secara manual dengan tangan, apa putaran
motor seret atau terdengar suara bearing yang rusak. Kerusakan bearing yang tidak terlalu parah, tidak akan mengeluarkan suara yang keras, sehingga diperlukan alat bantu stetoskop. Jika tidak punya stetoskop, coba jalankan motor tanpa beban dengan tegangan listrik secara hati-hati (awas bahaya putaran motor). lalu perhatikan suara motor kembali, panas pada body motor, dan ampere motor yang tanpa beban ini. jika tidak ada masalah di motor, lanjutkan pengecekan pada beban atau mesin.
5. Pengecekan beban ini, tidak bisa dijelaskan secara rinci karena
tergantung dari jenis beban.
- Jika pada beban impeller, apakah impellernya seimbang? perlu diketahui,
impeller yang tidak seimbang mengakibatkan motor panas, bearing rusak dan arus meningkat.
- Jika pada beban conveyor,apakah jalannya conveyor berat? apakah
conveyornya tidak macet,? Apa jalannya conveyor tidak terhambat oleh suatu benda? apa bearing-bearing roll conveyor dalam kondisi baik?
- Jika pada beban pompa, apa pompa jalannya lancar dan tidak berat? Apa
kopling motor dengan pompa center? Dan lain sebagainya.
- Pengecekan yang sama juga diperlukan pada beban-beban yang lain.
Perlu diingat, semakin berat beban untuk berputar, berarti semakin besar daya yang dibutuhkan, Dan dengan daya yang dibutuhkan semakin
besar(P) dan dengan tegangan(V) dan faktor daya(cos φ) yang tetap, maka ampere/arus listriklah(I) yang meningkat. Ingat rumus daya aktif, P = V . I . cos φ .
Sampai disini artikel tentang pengukuran ampere motor listrik-nya. Semoga bisa bermanfaat. Baca juga artikel yang lainnya tentang “menghitung arus, daya, kecepatan, dan torsi motor”.
MESIN ASYNKRON ATAU MOTOR TAK
SEREMPAK
Hmm.. Setelah bingung mencari materi apa yang ingin di postingkan, akhirnya saya menemukan materi ini. karena situasi ayng sedang sibuk berbarengan dengan tugas kuliah yang menumpuk, maka hanya ini yang dapat saya postingkan. Semoga bermanfaat.
Motor tidak serempak dibedakan menjadi dua jenis. Yaitu : 1. Motor iduksi 1 phase.
Ditinjau dari rotor yang digunakan adalah : 1. Rotor lilit.
a. Motor jenis ini sering disebut dengan motor cincin serat. Rotor jenis ini digunakan pada
motor induksi 3 phase yang berdaya besar. 2. Rotor sangkar.
a. Motor jenis ini sering disebut dengan motor hubung singkat. Rotor ini digunakan pada motor
induksi 1 phase yang berdaya kecil.
Motor induksi 3 fase memiliki beberapa bagian. Diantaranya adalah :
1. Inti stator. Pada permukaan inti stator terdapat alur-alur stator tempat untuk meletakkan
lilitan stator. Inti stator terbuat dari bahan feromagnetik yang berlapis-lapis.
2. Lilitan stator. Lilitan stator ini merupakan tempat untuk menghasilkan garis gaya magnet atau
3. Rotor sangkar. Terdiri dari sejumlah batang yang dihubungkan sedemikian rupa dengan
duabuah gelang, sehingga menyerupai suatu sangkar. Batang dipasang secara aksial atau agak miring dan pada ujung-ujungnya diikat dengan sebuah gelang.
4. Rotor lilit. Pada permukaannya terdapat lilitan rotor.
Secara umum, jumlah putaran medan magnet stator sering disebut dengan putaran sinkron (putaran serempak) dapat ditentukan dengan rumus :
Dengan keterangan :
N : Jumlah putaran sinkron medan magnet stator (RPM). p : Jumlah pasang kutub.
f : frekwensi sumber (Hz).
Sedangkan untuk menghitung besarnya slip yang dialami oleh motor adalah :
Dengan keterangan : S : Slip
Ns : Jumlah putaran pada stator. Nr : Jumlah putaran pada rotor.
Untuk menghitung besarnya arus yang mengalir pada lilitan rotor adalah :
Dengan keterangan :
Err : GGL induksi lilitan rotor saat jalan perfase. S : Slip.
Rr: Tahanan lilitan rotor perfase. Ir : Arus lilitan rotor perfase. Xr0 : Reaktansi lilitan rotor.
Sedangkan untuk menghitung rugi-rugi pada lilitan (P2Cu) adalah :
Dengan keterangan :
P2cu : Rugipada lilitan.
Ir : Arus yang mengalir pada lilitan rotor perfase. Rr : Tahanan lilitan rotor per fasa.
Sedangkan untuk menghitung daya keluran rotor adalah : Dengan keterangan :
P2 : Daya keluaran pada motor. Ir : Arus pada lilitan rotor.
S : Slip.
Sedangkan untuk menghitung daya masukan pada motor : Atau untuk daya 3 phase
Dengan keterangan :
P1 : Daya masukan motor. Vs : Tegangan sumber perphase. Is : Arus pada lilitan stator.
Untuk menghitung daya pada celah udara adalah :
Dari ketiga persamaan untuk menghitung daya pada celah udara, maka didapat : Dengan keterangan :
S : Slip.
Ir : Arus pada rotor.
Rr : Tahanan lilitan rotor perphase.
Er0 : GGL induksi pada lilitan rotor saat diam. Zrr : Impedansi lilitan rotor.
P12 : Daya pada celah udara. Untuk menghitung daya pada rotor : Dengan keterangan :
P2 : Daya pada rotor. S : Slip.
Ns : Jumlah putaran pada stator. Nr : Jumlah putaran pada rotor. P12 : Daya pada celah udara. P2Cu : Rugi inti tembaga perphase.
Untuk menghitung efisiensi pada motor adalah : Dengan keterangan :
P12 : Daya pada celah udara.
P1Cu : Rugi tembaga pada stator.
Dengan keterangan :
To : Torsi keluaran pada motor. Po : Daya keluaran pada motor. π : 3,14
N : Jumlah putaran dalam RPM.
Untuk memprediksi besarnya torsi terhadap perubahan teganan dapat dihitung melalui rumus :
Dengan keterangan :
Tmax 1 : Torsi maksimal pada tegangan sebelum diubah.
Tmax 2 : Torsi maksimal setelah ada perubahan tegangan
V1 : Tegangan pada saat torsi maksimal sebelum ada perubahan tegangan.
V2 : Tegangan pada saat torsi maksimal setelah ada perubahan tegangan.
Motor induksi 3 phase merupakan salah satu cabang dari jenis motor listrik yang merubah energi listrik menjadi energi gerak berupa putaran yang mempunyai slip antara medan stator dan rotor dengan sumber tegangan 3 phase. Arus rotor motor ini bukan diperoleh dari suatu sumber listrik, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar.
Motor induksi 3 phase merupakan motor arus bolak-balik (AC) yang paling banyak digunakan untuk keperluan dalam kelangsungan proses suatu industry. Konstruksinya yang sederhana dan kuat mendasari alasan keluasan pemakaianya. Dengan menggunakan motor induksi 3 phase, banyak hal yang bisa dilakukan. Salah satunya adalah dengan membalik arah putarannya sesuai dengan yang diinginkan. Cara yang sering dilakukan dalam pembalikan arah putaran adalah dengan menukar salah satu phase dengan phase yang lainnya yang terhubung pada lilitan stator motor.
Motor induksi 3 fasa berputar pada kecepatan yang pada dasarnya adalah konstan. Kecepatan putaran motor ini dipengaruhi olehfrekuensi, dengan demikian pengaturan kecepatan tidak dapat dengan mudah dilakukan terhadap motor ini, namun motor induksi 3 phase merupakan jenis motor listrik yang paling banyak digunakan pada dunia industri karena sesuai kebutuhan dan memiliki banyak keuntungan
Prinsip kerja Motor 3 Phasa
Bila sumber tegangan tiga phase dipasang pada kumparan stator, maka pada kumparan stator akan timbul medan putar dengan kecepatan, ns = 120f/P , ns = kecepatan sinkron, f = frekuensi sumber, p = jumlah kutup. Medan putar stator akan memotong konduktor yang terdapat pada sisi rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi ( ggl ) sebesa E2s = 44,4fnØ . Keterangan : E = tegangan induksi ggl, f = frekkuensi, N = banyak lilitan, Q = fluks. Karena kumparan rotor merupakan kumparan rangkaian tertutup, maka tegangan induksi akan menghasilkan arus ( I ). Adanya arus dalam medan magnet akan menimbulkan gaya ( F ) pada rotor. Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar untuk memikul torsi beban, maka rotor akan berputar searah dengan arah medan putar stator. Untuk membangkitkan tegangan induksi E2s agar tetap ada, maka diperlukan adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan putar rotor (nr). Perbedaan antara kecepatan nr dengan ns disebut dengan slip ( S ) yang dinyatakan dengan Persamaan S = ns-nr/ns (100%). Jika ns = nr tegangan akan terinduksi dan arus tidak mengalir pada rotor, dengan demikian tidak ada torsi yang dapat dihasilkan. Torsi suatu motor akan timbul apabila ns > nr. Dilihat dari cara kerjanya motor tiga phasa disebut juga dengan motor tak serempak atau asinkron.
Jenis Motor Induksi 3 phase Berdasaarkan Bentuk Rotornya
A. Motor induksi 3 phase rotor belitan
Jenis motor induksi ini mempunyai belitan kumparan 3 phase sama seperti kumparan statornya serta kumparan stator dan rotornya mempunyai jumlah kutub yang sama. Belitan 3 phase pada motor jenis ini biasanya terhubung Y dan ujung 3 kawat belitan rotor tersebut di hubungkan pada slipring yang terdapat pada poros rotor. Belitan-belitan rotor ini kemudian di hubung singkatkan melalui sikat (brush) yang menempel pada slipring dengan sebuah perpanjangan kawat untuk tahanan luar. slipring dan sikat merupakan penghubung belitan rotor ke tahanan luar (fungsi tahanan luar yaitu membatasi arus awal yang besar). Tahanan luar ini kemudian perlahan dikurangi hingga nol sebagaimana kecepatan motor yang bertambah telah mencapai kecepatan penuh. Setelah mencapai kecepatan penuhnya, 3 buah sikat akan terhubung singkat (tanpa tahanan luar ) maka rotor belitan ini akan bekerja mirip seperti rotor sangkar. Motor induksi jenis ini mempunyai arus awal yang rendah dan torsi awal yang tinggi.
Gambar 1. Bentuk rotor belitan B. Motor indusi 3 phase rotor sangkar
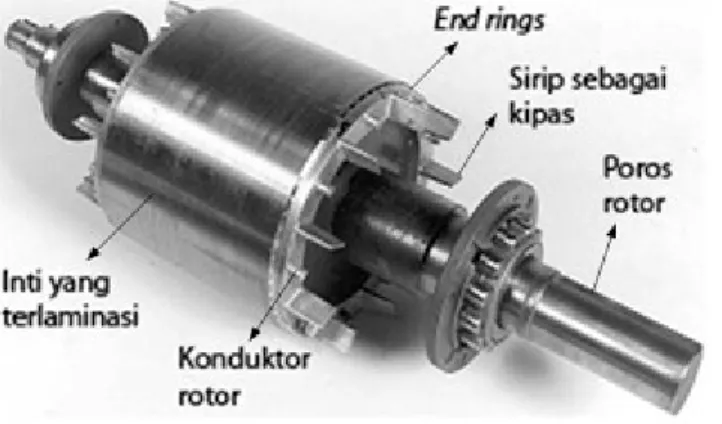
Jenis motor induksi ini terdiri dari tumpukan lempengan besi tipis yang dilaminasi dan batang konduktor yang mengitarinya, tumpukan besi yang dilaminasi tersebut disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor) dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring) atau disebut juga dengan end ring. Motor induksi jenis ini tidak terdapat komutator sehingga tidak memercikan bunga api. Motor induksi jenis ini mempunyai arus awal tinggi, torsi awal rendah dan Kapasitas Overload tinggi. serta Efesiensi dan faktor kerjanya lebih tinggi dibanding rotor belitan.
Gambar 2. Bentuk rotor sangkar
Untuk mengurangi besarnya arus start pada motor induksi 3 phase yang mendekati 7x arus nominal maka dapat dengan menggunakan metode start Star-Delta. Dengan metode ini motor awalnya disetting pada asutan Star, setelah motor mencapai kecepatan 80% kecepatan maksimal, sambungan diubah ke sambungan Delta. Dengan cara ini maka torsi dapat dipertahankan sedangkan lonjakan arus start dapat ditekan.
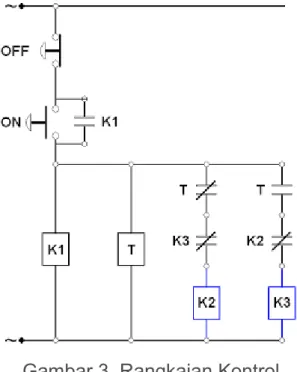
Star delta adalah sebuah sistem starting motor yang paling banyak dipergunakan untuk starting motor listrik. Dengan menggunakan star delta starter Lonjakan arus listrik yang terlalu tinggi bisa dihindarkan. cara kerjanya adalah saat start awal motor tidak dikenakan tegangan penuh hanya 0.58 dengan cara dihubung bintang/ star. Setelah motor berputar dan arus sudah mulai turun dengan menggunakan timer arus dipindahkan menjadi segitiga/ delta sehingga tegangan dan arus yang mengalir ke motor penuh. Bentuk dari rangkaian kendali dan rangkaian star-deltany dapat dilihat dari gambar berikut:
Gambar 4. Rangkaian Star-delta
Gambar 5. Wiring Diagram star-delta
Konstruksi Motor Induksi 3 Phase
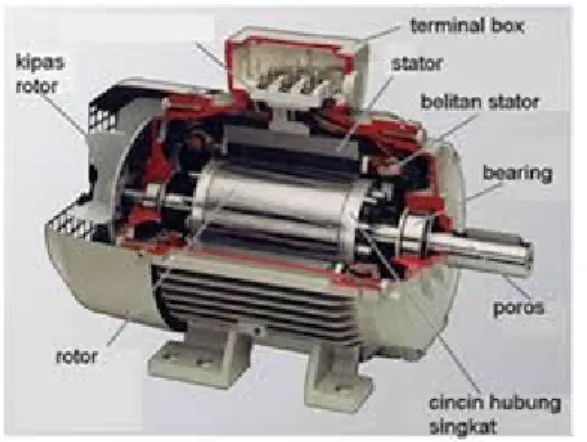
Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dengan rotor ada celah udara (gap) yang jaraknya sangat kecil.
Gambar 6. Konstruksi motor 3 phase
1. Konstruksi sangat kuat dan sederhana terutama bila motor dengan rotor sangkar.
2. Harganya relatif murah dan kehandalannya tinggi.
3. Effesiensi relatif tinggi pada keadaan normal, tidak ada sikat sehingga rugi gesekan kecil.
4. Biaya pemeliharaan rendah karena pemeliharaan motor hampir tidak diperlukan.
Kerugian Penggunaan Motor Induksi 3 phase
1. Kecepatan tidak mudah dikontrol
2. Power faktor rendah pada beban ringan
4. Arus start biasanya 5 sampai 7 kali dari arus nominal Artikel diambil dari berbagai sumber.