SISTEM PENGUKUR DAN MONITORING KECEPATAN
GERAK KENDARAAN BERMOTOR
Hafizh Hibban
1),
Wakhyu Dwiono, S.T, M.T
2), Noptin Harpawi, S.T., M.T
3) Program Studi Teknik Elektronika Telekomunikasi, Politeknik Caltex Riau, email : [email protected]), [email protected]2), [email protected]3)Abstrak - Angka kematian di jalan raya selalu bertambah tiap tahunnya. Salah satu faktor yang menambah angka kematian di jalan raya itu adalah pengendara kendaraan bermotor yang mengemudikan kendaraannya melebihi batas kecepatan yang diperbolehkan namun pihak berwenang mengalami kesulitan untuk menangkap pelaku dikarenakan bukti-bukti yang kurang kuat sehingga penulis berinisiatif membuat alat yang mampu menghitung kecepatan kendaraan yang melewati suatu ruas jalan tertentu. Alat ini menggunakan mikrokontroler atmega 8535 sebagai pusat kontrol dan menggunakan sensor photo transistor dan laser sebagai sensor untuk memulai penghitungan waktu atau menghentikan penghitungan waktu. Hasil perhitungan kecepatan akan ditampilkan di seven segmen dan server dan bila kecepatan terukur melebihi 30 km/jam maka ID yang dipancarkan oleh sistem ID di kendaraan direkam ke dalam database server. Setelah diuji, persentase error rata-rata yang dihasilkan oleh alat sebesar 2,661 % sehingga cukup akurat untuk menghitung kecepatan kendaraan yang melintas.
Kata kunci : kecepatan, mikrokontroler atmega 8535, dan photo transistor.
Abstract - The death rate on the road continues to increase each year. One of top factors which increase this death rate is drivers who drive their vehicle exceeds the speed limit but authorities are difficult to catch them because the evidence is not strong enough to punish them so the author took initiative to create tool or system which is able to calculate the speed of vehicles which pass through a particular road. This tool uses atmega 8535 as the control center and uses a photo transistor and a laser to start or to stop the calculation of interval time. The result of the calculation speed will be displayed in seven segments and the server and if the speed measured exceed 30 km/hours then the ID which is transmitted by ID system located on vehicle is recorded in server database. After testing whole system, the author got the average percentage of error generated by the system is 2,661 % so it is quite accurate to calculate the speed of passing vehicles.
Keywords : speed, microcontroller atmega 8535, and photo transistor.
1. PENDAHULUAN
Dewasa ini transportasi telah menjadi kebutuhan penting bagi manusia bahkan sebagian besar harga sembako dan kebutuhan pokok sangat terpengaruh oleh transportasinya. Hal ini membuat pertumbuhan jumlah kendaraan lebih meningkat dibanding pertumbuhan jumlah jalan sehingga menyebabkan fasilitas dan kualitas jalan tidak memadai lagi. Data Kepolisian RI menyebutkan, pada 2012 terjadi 109.038 kasus kecelakaan dengan korban meninggal dunia sebanyak 27.441 orang dengan potensi kerugian sosial
ekonomi sekitar Rp 203 triliun – Rp 217 triliun per tahun. Sedangkan pada 2011, terjadi kecelakaan sebanyak 109.776 kasus dengan korban meninggal sebanyak 31.185 orang [1].
mengukur kecepatan kendaraan yang melintas di jalan raya sehingga bisa diketahui kecepatan kendaraan apakah melebihi batas kecepatan yang dizinkan.
Sistem penghitung kecepatan gerak kendaraan bermotor bisa diaplikasikan disini dimana sistem memanfaatkan dua buah sensor photo transistor untuk menghitung laju kendaraan kemudian bila kecepatan melebihi batas kecepatan maka akan terekam oleh server.
2. TINJAUAN PUSTAKA
2.1 Review Penelitian Terdahulu
Sistem pengukur kecepatan kendaraan bermotor ini memiliki beberapa referensi dari review penelitian sebelumnya. Review tersebut berguna untuk memberikan masukan dan ide untuk proyek akhir yang akan dibuat. Adapun review dari beberapa penelitian sejenis tersebut diuraikan dibawah ini :
2.1.1 Perancangan Prototype Deteksi Kecepatan Kendaraan Menggunakan RFID Berbasis Mikrokontroler Atmega 8535 [2].
Proyek akhir Decy Nataliana ini merancang suatu detektor kecepatan dimana terdapat dua buah sensor ultrasonik sebagai pembaca adanya kendaraan yang melintas diantara kedua sensor tersebut. Kemudian akan diperoleh selang waktu yang di proses selanjutnya oleh mikrokontroller sebagai data kecepatan. Kecepatan ini akan ditampilkan di LCD 16x2. Sistem juga dilengkapi dengan sebuah buzzer yang secara otomatis berbunyi jika kecepatan yang terbaca melebihi ketentuan batas maksimum kecepatan yang telah ditentukan. Sistem juga dilengkapi dengan modul RFID untuk mendeteksi data pemilik kendaraan yang melintas dan data ini dapat langsung dilihat pada personal komputer di kantor polisi.
2.1.2 Pengukur Kecepatan Gerak Benda Menggunakan Sensor Phototransistor Berbasis Mikrokontroler Atmega 8535 [3].
Proyek akhir Ery Safrianti ini merancang sebuah sistem yang mampu mendeteksi dan mengukur kecepatan gerak atau lajur kendaraan bermotor. Sistem dirancang dengan memanfaatkan dua buah sensor phototransistor dan dua buah infra red sebagai sumber cahaya sehingga ketika benda melewati sensor
pertama maka mikrokontroller akan menghdupkan timer, kemudian setelah benda menyentuh sensor kedua maka akan memberikan sinyal pada mikrokontroller untuk menghentikan timer. Timer ini merupakan selang waktu yang akan dimanfaatkan oleh mikrokontroller untuk melakukan perhitungan kecepatan dari kendaraan yang melintas. Kemudian kecepatan dikonversikan dalam satuan meter per detik (m/s) dan menampilkannya ke LCD 16x2.
2.1.3 Sensor Ultrasonik SRF05 Sebagai Memantau Kecepatan Kendaraan Bermotor [4].
Pada proyek akhir Slamet Hani ini adalah membuat sistem yang mampu memantau kecepatan kendaraan bermotor namun disini pembahasan ia lebih titik beratkan pada penggunaan sensor ultrasonik SRF05 karena biasanya sensor ini digunakan untuk mengukur jarak. Oleh karena sifat sensor ini yang bekerja berdasarkan pemantulan suara, maka penggunaan 2 sensor ultrasonik akan mampu untuk mengukur kecepatan. Sistem pengukuran kecepatan ini yang pertama mengukur jarak pantul dari sensor ultrasonik kurang dari batas maksimal pemantauan.
Sensor akan mulai menghitung waktu dan waktu akan berhenti saat sensor kedua mendapatkan pantulan. Besar nilai kecepatan didapat dari hasil bagi antara jarak kedua sensor dengan waktu pantul antara dua sensor. Besarnya nilai kecepatan akan ditampilkan pada LCD 16x2. Nilai kecepatan yang terukur oleh alat ini masih kurang presisi disebabkan adanya waktu tunda yang terdapat pada sensor ultrasonik yang mempengaruhi waktu guna mendapatkan nilai kecepatan.
2.1.4 Pengukuran Kecepatan Kendaraan Bermotor Berbasis Mikrokontroler Atmega 8535 Melalui Komunikasi GSM [5].
akan mengirim input data ke mikrokontroler sebagai data untuk melakukan perhitungan waktu. Data jarak dan waktu yang diperoleh diolah dengan menggunakan program perhitungan kecepatan pada mikrokontroler sehingga data kecepatan dibandingkan data kecepatan maksimum yang diseting pada mikrokontroler dengan menggunakan keypad. Setelah itu data jarak, waktu, dan kecepatan ditampilkan pada LCD. Apabila kecepatan melebihi batas kecepatan maksimum maka data kecepatan akan dikirim oleh modul GSM yang telah terhubung dengan mikrokontroler dalam bentuk SMS. SMS data kecepatan tersebut akan diterima oleh modem GSM yang terhubung pada Personal Computer (PC) dan data SMS akan ditampilkan dalam bentuk database pada PC tersebut.
2.1.5 Aplikasi Infra Merah Sebagai Pendeteksi Kecepatan Kendaraan Dengan Berbasis Mikrokontroller Atmega 8535 [6].
Pada proyek akhir Fajar Roland ini dirancang sebuah sistem yang mampu mengukur kecepatan kendaraan. Sistem atau alat ini menggunakan mikrokontroller Atmega 8535 sebagai pusat kendali dan menggunakan sensor fotodioda sebagai sensor dari cahaya infra merah dimana gabungan dari fungsi fotodioda dan fungsi infra merah akan mampu mendeteksi setiap kendaraan yang melintas dan menghitung kecepatan dari setiap kendaraan yang melintas tersebut. Output tampilan alat ini menggunakan LCD (Liquid Crystal Display) dan mengaktifkan buzzer jika ada kendaraan yang melintas.
2.2 Photo transistor [7]
Sebuah photo transistor sama dengan transistor bipolar biasa, bedanya tidak terdapat terminal basis. Sebagai penggantinya, arus input transistor diberikan dalam bentuk cahaya.
Gambar 2.1 Rangkaian dasar photo transistor
Arus basis (ICBO) bertindak sebagai arus
basis karena IC =
βdc . I
β+(
βdc
+
1
)(
I
CBO)
dalam hal ini IC = ICCO, arus bocor kolektor emitter denganbasis terbuka. Hal yang sama ICBO dalam
photo transistor naik bila hubungan basis kolektor diterangi. Bila ICBO dinaikkan arus
kolektor (
β
+
1
¿
ICBO juga naik, makauntuk sejumlah penyinaran yang sangat sempit, photo transistor lebih peka dari photo dioda. Beberapa photo transistor yang lain memiliki basis dan sinar yang datang untuk membangkitkan arus basis, beberapa transistor yang lain memiliki terminal basis sehingga dapat diberikan tegangan yang luar biasa.
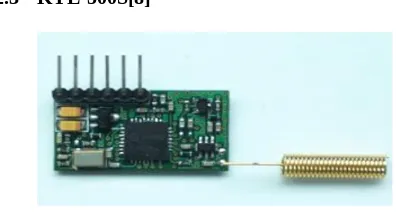
2.3 KYL-500S[8]
Gambar 2.2 KYL-500S
KYL-500S merupakan sebuah RF transceiver dengan ukuran cukup mini. alat ini dengan antar muka TTL nya sehingga banyak digunakan untuk komunikasi tanpa kabel antar mikrokontroller dan sistem komunikasi dengan port TTL lainnya. Alat ini memiliki tingkat ketahanan dan performansi yang sangat baik.
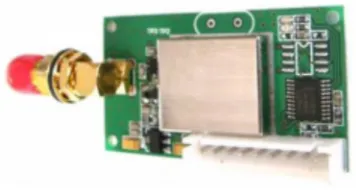
Gambar 2.3 KYL-1020U
KYL-1020U series merupakan modul RF low power yang di desain untuk sistem transmisi data UART dalam jarak pendek. Alat ini bekerja pada ISM frequency band
secara half duplex ketika menerima dan mengirim data. Modul ini dapat langsung di koneksikan dengan monolithic processor, PC, RS485 devices, dan komponen UART lainnya dengan RS-232, RS-485, dan UART/TTL level interface port.
3. PERANCANGAN
3.1 Blok Diagram Sistem
Blok diagram dari sistem yang dirancang terdiri dari tiga blok sistem, yaitu blok I, blok II, dan blok III. Adapun blok diagram sistem secara keseluruhan dapat dilihat pada gambar berikut ini :
Berdasarkan gambar blok diagram diatas, sistem dibagi menjadi tiga blok, yaitu : blok I sebagai sistem kontrol pusat, blok II sebagai sistem ID, dan blok III sebagai sistem server. Sistem kontrol pusat berguna untuk mengukur kecepatan kendaraan yang melintasi sensor serta mengambil ID dari sistem ID yang terdapat pada kendaraan kemudian mengirimkan data
kecepatan dan ID kendaraan ke sistem server
menggunakan access point. Setelah itu,
server menampilkan kecepatan yang diterima secara langsung kepada user dan bila kecepatan melebihi batas ketentuan maka alarm berbunyi serta ID yang diterima lalu dicocokkan dengan database sehingga sebagai hasil akhir adalah identitas pelanggar dapat diketahui.
4. HASIL DAN PEMBAHASAN
Pada bagian ini dilakukan proses pengujian yang berguna untuk menguji apakah alat yang dibuat telah memenuhi kriteria yang diinginkan dan sesuai dengan teori-teori yang ada. Pengujian dilakukan menggunakan alat ukur pendukung dan berbagai teknik lain yang perlu mendapat perhatian agar mampu menghasilkan pengukuran yang akurat dan presisi.
Proses pengujian sistem pengukur dan monitoring kecepatan gerak kendaraan bermotor ini meliputi pengujian sensor, pengujian sistem minimum mikrokontroler, pengujian penerimaan ID, dan pengujian
server. Setelah sistem di uji secara terpisah maka penulis selanjutnya dapat melakukan pengujian sistem secara keseluruhan. Adapun pengujian dapat dijabarkan sebagai berikut :
4.1 Pengujian Sensor
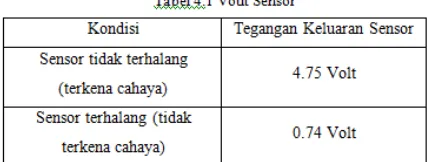
Pengujian sensor bertujuan untuk melihat apakah rangkaian sensor sudah bekerja sebagaimana mestinya. Pengujian sensor terdiri dari pengujian Vout sensor dan pengujian Vout sensor terhadap perubahan intensitas cahaya laser.
Prosedur dan Hasil Pengujian Pengujian Vout Sensor
Pengujian dilakukan dengan
menghubungkan sensor ke rangkaian komparator kemudian output komparator diukur tegangan keluarannya menggunakan multimeter digital. Setelah proses ini dilakukan, sensor laser kemudian dilihat tegangan keluaraannya ketika terkena cahaya laser ataupun tidak sehingga didapatkan data seperti berikut ini :
Berdasarkan data yang dari tabel 4.1 terlihat bahwa ketika rangkaian sensor terkena cahaya laser maka tegangan keluaran sensor bernilai 4.75 Volt (high) dan ketika rangkaian tidak terkena cahaya laser tegangan keluaran sensor menjadi 0.74 Volt (low) sehingga dapat dikatakan rangkaian sensor dapat berjalan dengan baik sebab mikrokontroler dapat membedakan kondisi
high atau low dengan nilai tegangan keluaran yang demikian.
Pengujian Vout sensor terhadap intensitas cahaya laser
Pengujian dilakukan dengan
menghubungkan sensor ke rangkaian komparator kemudian output komparator diukur tegangan keluarannya menggunakan multimeter digital. Setelah itu laser diarahkan ke sensor dengan jarak yang diatur mulai dari 3 meter hingga 20 meter sehingga akan terlihat perubahan tegangan keluaran komparator dan keadaan led indikator seperti pada tabel berikut ini :
Berdasarkan data pada tabel 4.2 terlihat bahwa intensitas cahaya laser sangat berpengaruh terhadap respon dari sensor. Semakin jauh jarak laser terhadap sensor maka intensitas cahaya laser yang mengenai sensor photo transistor semakin kecil disebabkan oleh divergensi cahaya laser sehingga respon rangkaian sensor juga semakin berkurang. Ini terbukti dimana pada jarak mulai dari 10 meter dari laser, tegangan
keluaran sensor tetap low padahal seharusnya tegangan keluaran high.
4.2 Pengujian Sistem Minimum Mikrokontroler
Pengujian sistem minimum
mikrokontroler bertujuan untuk untuk melihat bekerja tidaknya rangkaian sistem minimum mikrokontroler. Pengujian dilakukan terhadap dua rangkaian sistem minimum, yaitu rangkaian sistem minimum atmega 8535 dan rangkaian sistem minimum attiny 2313. Pengujian dilakukan dengan mengirimkan string tertentu dari rangkaian sistem minimum ke komputer menggunakan fasilitas serial USART sehingga terlihat apakah sistem minimum bekerja dengan semestinya atau tidak.
Prosedur dan Hasil Pengujian Pengujian atmega 8535
Pengujian dilakukan dengan
mengaktifkan fasilitas USART pada mikrokontroler atmega 8535 kemudian mendownload program yang dapat mengirimkan suatu string tertentu ke komputer melalui komunikasi serial. Setelah proses ini dilakukan, mikrokontroler dapat dihubungkan dengan komputer menggunakan rangkaian RS-232. Untuk melihat hasil kiriman data dari mikrokontroler maka pada komputer dapat menggunakan terminal CodeVision sehingga penulis mendapatkan data seperti pada gambar berikut ini :
Gambar 4.1 Hasil pengujian atmega 8535
rangkaian sistem minimum mikrokontroler ini mampu menjalankan instruksi program dengan baik dan bekerja sebagaimana mestinya.
Pengujian atmega 2313
Pengujian dilakukan dengan
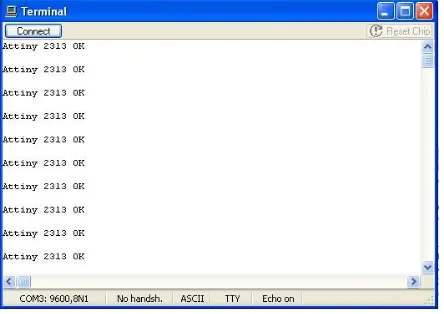
mengaktifkan fasilitas USART pada mikrokontroler attiny 2313 kemudian mendownload program yang dapat mengirimkan suatu string tertentu ke komputer melalui komunikasi serial. Setelah proses ini dilakukan, mikrokontroler dapat dihubungkan dengan komputer menggunakan rangkaian RS-232. Untuk melihat hasil kiriman data dari mikrokontroler maka pada komputer dapat menggunakan terminal CodeVision sehingga penulis mendapatkan data seperti pada gambar berikut ini :
Gambar 4.2 Hasil pengujian attiny 2313
Berdasarkan gambar 4.2 terlihat komputer menerima dengan baik string “Attiny 2313 OK “ yang dikirimkan sistem minimum mikrokontroler attiny 2313. Ini berarti rangkaian sistem minimum mikrokontroler ini mampu menjalankan instruksi program dengan baik dan bekerja sebagaimana mestinya.
4.3 Pengujian Sistem ID
Pengujian sistem ID bertujuan untuk melihat baik tidaknya ID yang dipancarkan oleh sistem ID yang diletak kendaraan yang bergerak. Pengujian dilakukan dalam dua tahap yaitu menguji sistem ID dengan berbagai kecepatan kendaraan dan menguji sistem ID yang saling berdekatan.
Prosedur dan Hasil Pengujian
Pengujian sistem ID dengan kecepatan berbeda Pengujian dilakukan dengan meletakkan sistem ID di kendaraan bermotor dan mengaktifkan sistem ID tersebut sehingga sistem dapat memancarkan ID menggunakan KYL. Sementara itu, dibagian penerima komputer dihubungkan juga dengan KYL untuk menangkap ID yang dipancarkan. Setelah semua proses dilakukan, kendaraan kemudian dipacu dengan kecepatan tertentu dan ketika kendaraan telah mendekati penerima maka dengan menggunakan terminal dapat dilihat apakah ID yang diterima baik
Tabel 4.3 Hasil pengujian sistem ID dengan kecepatan berbeda
Berdasarkan data hasil pengujian tabel 4.3 terlihat sistem ID yang menggunakan 500S sebagai media pemancar dan KYL-1020U sebagai media penerima tidak ditemukan error dalam penerimaan ID meskipun kecepatan kendaraan sangat tinggi. Hal ini karena KYL memang memiliki ketahanan noise yang cukup tinggi.
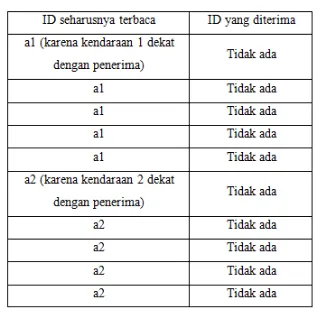
Pengujian sistem ID yang berdekatan
Pengujian dilakukan dengan
Tabel 4.4 Hasil pengujian sistem ID yang berdekatan
Berdasarkan data pada tabel 4.4 dimana bila ada ID yang saling berdekatan maka di penerima tidak ada ID yang terbaca, ini dikarenakan KYL memiliki daya pancar yang cukup jauh hingga > 20 meter dan bekerja pada frekuensi yang sama sehingga kemungkinan data hancur cukup besar diantara sistem ID 1 dan sistem ID 2 yang berdekatan. Oleh sebab itu KYL kurang cocok digunakan untuk media pemberian ID pada kendaraan secara wireless.
4.4 Pengujian Server
Pengujian server bertujuan untuk melihat baik tidaknya server ketika mengolah data yang diterima dari sistem kontrol pusat yang. Pengujian yang dilakukan adalah menguji tampilan server dan database ketika menerima data dari sistem kontrol pusat. Namun disini karena pengujian masih dilakukan terpisah maka dapat digunakan aplikasi Hercules sebagai pengganti fungsi pengiriman data oleh sistem kontrol pusat.
Prosedur dan Hasil Pengujian Pengujian tampilan server
Pengujian dilakukan dengan menjalankan
server dan aplikasi Hercules kemudian pada tab TCP client Hercules diisikan IP localhost (127.0.0.1) dan port 5000. Setelah aplikasi Hercules konek ke server, string tertentu disesuaikan dengan data kecepatan sebenarnya seperti mengirimkan data kecepatan saja “025” dan data kecepatan disertai ID “032a2” sehingga pada tampilan
server akan tampak seperti gambar dibawah ini :
Gambar 4.3 Tampilan ketika menerima data kecepatan saja
Gambar 4.4 Tampilan ketika menerima data kecepatan dan ID
Berdasarkan data yang telah didapatkan maka terlihat bahwa server dapat menampilkan data kecepatan dengan sangat baik ketika data yang dikirim berupa data kecepatan saja ataupun data kecepatan dan ID sehingga tampilan server sudah sesuai dengan semestinya. Oleh sebab itu, server
telah siap untuk digunakan pada sistem secara keseluruhan.
Pengujian database
Pengujian dilakukan dengan menjalankan
Gambar 4.5 Hasil penerimaan data kecepatan dan ID yang melebihi batas kecepatan
Gambar 4.6 Hasil penerimaan data kecepatan yang melebihi batas kecepatan
Berdasarkan gambar 4.5 dan gambar 4.6 terlihat bahwa ketika server menerima data kecepatan dan ID dimana kecepatan melebihi batas kecepatan maka record pelanggaran kecepatan tersebut melebihi batas kecepatan maka identitas di record pelanggaran menjadi tidak diketahui.
4.5 Pengujian Sistem Secara Keseluruhan
Pengujian sistem secara keseluruhan dilakukan untuk melihat tingkat keberhasilan dari alat yang telah dibuat. Tingkat keberhasilan dari alat dapat dilihat dari membandingkan hasil pengukuran alat dengan teori-teori yang ada. Adapun penjabaran dari pengujian sistem secara keseluruhan diuraikan dibawah ini :
Analisis Perhitungan Teori Kecepatan Kendaraan
Mikrokontroler yang terletak di sistem kontrol pusat melakukan penghitungan jeda waktu kendaraan yang melewati sensor 1 dan sensor 2. Pada saat sensor 1 berlogika low
maka hal ini membuat mikrokontroler memulai penghitungan waktu hingga sensor 2 berlogika low yang menandakan
penghitungan berhenti. Penghitungan ini menggunakan fasilitas timer yang ada pada mikrokontroler dengan perhitungan sebagai berikut :
Timer dirancang untuk overflow interrupt tiap 10 us sehingga nilai register TCNT1 menjadi
TCNT
1=65536−
(
Timer yang diinginkan
(
Tosc × N
)
)
Tosc
=
1
osc
=
1
11059200
N merupakan prescaler, dalam hal ini penulis memilih prescaler 8 melewatinya nilai counter bertambah tiap 10 us dan berhenti ketika kendaraan telah melewati sensor 2. Nilai counter inilah yang menjadi nilai jeda waktu t dengan cara nilai counter * 10 / 1000000 sehingga didapatkan nilai t didalam detik. Sementara itu, jarak sensor maupun jarak laser dirancang 1 meter sehingga perhitungan kecepatan menjadi v = 1/t didalam meter/detik. Hasil perhitungan
Pengujian alat keseluruhan bertujuan untuk melihat ketelitian alat yang telah dirancang dimana hasil pengukuran kecepatan oleh alat akan dibandingkan dengan hasil pengukuran kecepatan oleh speedometer yang ada pada kendaraan. Tingkat ketelitian alat dapat dilihat dari persentase error yang dilakukan oleh alat dengan persamaan sebagai berikut :
error
=
|
tampilan speedometer
−
tampilanalat
tampilan speedometer
|
×
100
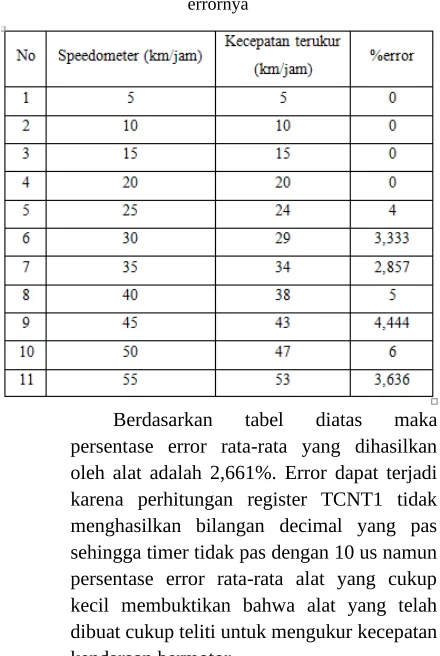
Tabel 4.5 Hasil pengujian ketelitian alat serta persentase errornya
Berdasarkan tabel diatas maka persentase error rata-rata yang dihasilkan oleh alat adalah 2,661%. Error dapat terjadi karena perhitungan register TCNT1 tidak menghasilkan bilangan decimal yang pas sehingga timer tidak pas dengan 10 us namun persentase error rata-rata alat yang cukup kecil membuktikan bahwa alat yang telah dibuat cukup teliti untuk mengukur kecepatan kendaraan bermotor.
Data Pengujian Validasi ID terhadap Kecepatan
Pengujian ini dilakukan untuk melihat apakah data kecepatan yang terukur valid dan sama dengan yang ditampilkan pada server
dan seven segment serta melihat apakah ID kendaraan yang melintasi sensor sesuai dengan yang terbaca pada server dengan cara memacu kendaraan melebihi melebihi 30 km/jam sehingga membuat server merekam kecepatan kendaraan tersebut ke dalam database sehingga dapat dibandingkan ID yang dikirim dengan yang diterima. Berikut adalah hasil pengujian validasi ID terhadap kecepatan :
Tabel 4.6 Hasil Pengujian validasi ID terhadap kecepatan
Berdasarkan tabel 4.6 terlihat bahwa ID yang dikirim oleh kendaraan bermotor
melintas sesuai dengan ID yang diterima
server namun dalam hal ini pengujian dilakukan terpisah antara kendaraan dengan ID a1 dengan kendaraan dengan ID a2.
5. KESIMPULAN
Setelah dilakukan pengujian beserta analisa pada proyek akhir ini maka dapat diambil kesimpulan sebagai berikut :
1. Persentase error rata-rata pengukuran kecepatan kendaraan oleh alat cukup kecil yaitu 2,661 % sehingga cukup akurat untuk menghitung kecepatan kendaraan yang bergerak melintasi sensor.
2. KYL tidak dapat digunakan sebagai media transmisi ID yang berbeda dan lebih dari satu karena interferensi antar KYL cukup besar bila ada kendaraan yang memiliki ID berdekatan.
6. SARAN
Setelah melakukan penelitian ini diperoleh beberapa hal yang dapat dijadikan saran untuk penelitian lebih lanjut, antara lain :
1. Pada perancangan alat ini diharapkan dapat dikembangkan kembali dengan mengganti media transmisi KYL dengan RFID aktif yang memiliki jarak transmisi dibawah 3 meter sehingga sistem tetap dapat membaca ID kendaraan yang saling berdekatan.
2. Pada perancangan alat ini diharapkan dapat dikembangkan lagi dengan menambah jumlah sensor dan laser sehingga dapat mengukur kecepatan jalan dua lajur sekaligus.
DAFTAR REFERENSI
[1] Badan Intelijen Negara. Alamat : http://www.bin.go.id/awas/detil/197/4/21/03/201 3/kecelakaan-lalu-lintas-menjadi-pembunuh-terbesar-ketiga. Diakses tanggal 13 November 2013.
[2] Decy Nataliana. (2011). Perancangan Prototype Deteksi Kecepatan Kendaraan Menggunakan RFID Berbasis Mikrokontroler Atmega 8535.
Bandung : Institut Teknologi Bandung.
[3] Ery Safrianti. (2009). Pengukur Kecepatan Gerak Benda Menggunakan Sensor Phototransistor Berbasis Mikrokontroler Atmega 8535. Pekanbaru : Universitas Riau.
[5] Deddy H.V Sagala. (2012). Pengukuran Kecepatan Kendaraan Bermotor Berbasis Mikrokontroler Atmega8535 Melalui Komunikasi GSM. Medan : Universitas Sumatera Utara.
[6] Fajar Roland W Sigalingging. (2011). Aplikasi Infra Merah Sebagai Pendeteksi Kecepatan Kendaraan Dengan Berbasis Mikrokontoler Atmega 8535. Medan : Universitas Sumatera Utara.
[7] Hermansyah Malau. (2008). Sistem Kerja Pengendali Perangkat Elektronik Rumah (ON/OFF) Berbasis Mikrokontroler AT89S52 Dengan Menggunakan Telepon Cordless.
Medan : Universitas Sumatera Utara.
[8] Shenzhen KYL Communication Equipment Co.Ltd. Datasheet KYL-500S Mini-size Wireless Data Transceiver Module. China.