B A B III
GPS REALTIME UNTUK PENGAMATAN
TROPOSFER DAN IONOSFER
3.1 Pengembangan Sistem GPS Realtime
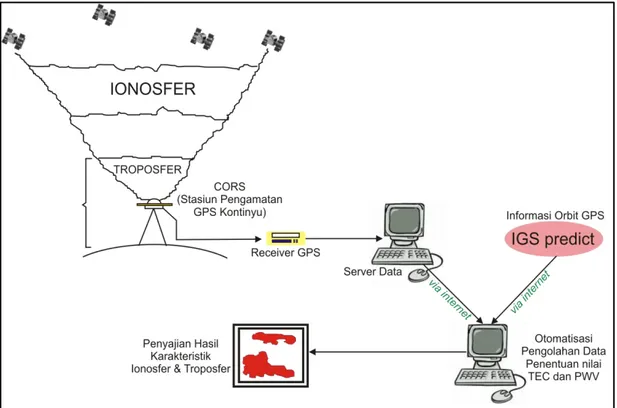
Karakteristik dari lapisan troposfer dan ionosfer bervariasi secara spasial dan temporal, oleh karena itu idealnya penelitian tersebut harus dilakukan pada banyak titik pengamatan dengan jarak tertentu serta dengan sesi pengamatan yang berkala. Penelitian ini mempunyai kelebihan daripada penelitian-penelitian sebelumnya dalam topik pengamatan lapisan troposfer dan ionosfer yaitu dengan digunakannya sistem GPS realtime dalam pengamatannya, dimana sistem ini dapat memperoleh hasil “seketika” mungkin saat data itu diperoleh sehingga bisa diestimasi variasi temporal dari karakteristik lapisan troposfer dan ionosfer pada saat pengamatan atau dalam kata lain karakteristiknya diestimasi secara realtime. Di bawah ini adalah skema yang menggambarkan mekanisme dari sistem GPS realtime yang dikembangkan pada penelitian ini.
3.1.1 Data CORS (Continuously Operating Reference Station)
Untuk kebutuhan pengamatan troposfer dan ionosfer secara realtime tentu saja harus didukung dengan pengadaan data secara realtime juga, oleh karena itu sistem ini menggunakan data stasiun pengamatan GPS kontinyu atau biasa disebut dengan CORS (Continuously Operating Reference Station). CORS yang dipakai dalam penelitian ini adalah CORS dari laboratorium Kelompok Keilmuan Geodesi FITB ITB yang ditempatkan di lantai 5 gedung LABTEK IX C. Gambar di bawah ini merupakan GPS CORS dari Kelompok Keilmuan Geodesi FITB ITB.
Gambar 3.2 GPS CORS KK Geodesi FITB ITB (http://geodesy.gd.itb.ac.id)
CORS tersebut secara terus menerus melakukan pengamatan di titik tersebut. Data observasi dan navigasi yang diperoleh secara otomatis didownload ke komputer server. Ada dua jenis data observasi yang dikeluarkan oleh CORS ini, yaitu data pengamatan dengan interval epok 1 detik (high rate) yang disimpan per 1 jam dalam file berformat CRX (Compressed RINEX) dan data pengamatan dengan interval epok 30 detik yang disimpan per 24 jam dalam file berformat CRX juga. Data pengamatan yang dipakai dalam sistem ini adalah data dengan interval epok 1 detik.
Setelah data pengamatan itu disimpan pada komputer server maka file data tersebut secara otomatis diupload ke komputer pemrosesan data dengan selang waktu 1 jam sesuai dengan waktu tersimpannya file CRX tersebut di komputer server. Pada komputer pemrosesan data, file CRX tersebut dikonversi menjadi format RINEX (Receiver Independent Exchange) dan langsung dipersiapkan untuk dilakukan pengolahan data secara otomatis oleh software Bernese.
3.1.2 Informasi Orbit Precise Ephemerides Prediksi
Untuk keperluan penentuan posisi GPS berketelitian tinggi maka harus didukung dengan ketersedian informasi orbit berketelitian tinggi pula, oleh karena itu haruslah digunakan informasi orbit eksternal yaitu dari IGS yang biasa kita sebut dengan precise ephemerides. Ada beberapa jenis informasi orbit dari IGS berdasarkan keakurasiannya dan waktu terbitnya (bisa dilihat pada tabel 2.3), untuk keperluan realtime processing informasi orbit yang digunakan adalah informasi orbit ultra rapid prediksi, dimana informasi ini berupa koordinat satelit geosentrik terikat bumi yang ditandai setiap 15 menit hasil dari interpolasi lagrange.
Ada beberapa ftp server yang menyediakan informasi orbit ini. Salah satunya adalah ftp server dari Bern Institute, namun dengan pertimbangan kecepatan dan kemudahan akses maka untuk sistem ini dipiih sever ftp milik pemerintahan Amerika dengan alamat ftp://cddis.gsfc.nasa.gov
3.1.3 Otomatisasi Pemrosesan Data
Strategi pemrosesan data yang dipakai adalah dengan post-processing yaitu hasil didapat dengan pemrosesan data terlebih dahulu, tetapi untuk menunjang sistem realtime pengamatan troposfer dan ionosfer ini maka harus dilakukan sistem pemrograman dengan algoritma tertentu sehingga data pengamatan GPS dan informasi eksternal lainnya dapat diproses secara otomatis sehingga dalam hitungan beberapa “menit” dapat dilihat hasilnya berupa karakteristik dari troposfer dan ionosfer daerah pengamatan. Software utama pemrograman yang dipakai dalam pemrosesan data tersebut adalah tool BPE (Bernese Processing Engine) dari Bernese 5 versi Linux.
Metoda penentuan posisi berhubungan dengan cara pengambilan data secara absolut atau differensial. Sistem ini dibangun memakai metoda penentuan posisi PPP (Precise Point Positioning) sehingga jelas cara pengolahan datanya secara absolut tanpa keterkaitan dengan titik lain di permukaan bumi. Pada metode PPP ini koreksi jam satelit tidak diestimasi tetapi diketahui dari informasi orbit dan parameter orientasi bumi sedangkan kesalahan jam receiver dapat dihilangkan dengan menggunakan differencing antar satelit.
Berkaitan dengan metode PPP yang dipakai, data observasi yang dipakai pada sistem ini adalah data kode saja, data fase dipakai hanya sampai pada tahapan smoothing data. Seperti kita ketahui bahwa untuk pengamatan absolut sangat sulit untuk menghilangkan ambiguitas fase pada pengamatan meskipun secara teoritis bisa dilakukan, oleh karena itu hanya data kode saja yang dipakai untuk pengolahan data penentuan bias troposfer dan ionosfer pada sistem ini.
3.2 Tahapan Pemrosesan Data
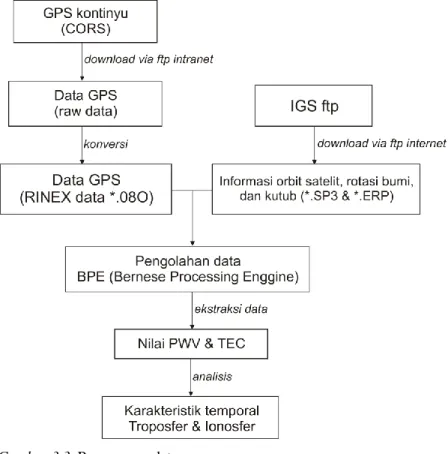
Ada beberapa tahapan umum dari pemrosesan data tersebut yang ditampilkan dalam diagram alir di bawah ini:
Gambar 3.3 Pemrosesan data
3.2.1 Persiapan Pengolahan Data Observasi GPS dan Informasi Orbit
Supaya dapat diolah di dalam perangkat lunak Bernese maka raw data GPS harus dikonversi terlebih dahulu dari format CRX menjadi format RINEX. Data tersebut terdiri dari data
observasi (*.08O) dan data navigasi (*.08N) tetapi yang dipakai dalam sistem ini hanya data observasi saja karena data navigasi (broadcast message) diganti dengan informasi eksternal dari IGS berupa informasi precise ephemerides.
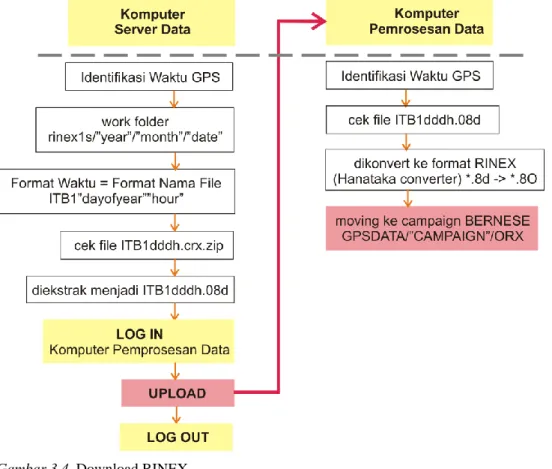
Data GPS yang dipakai adalah data high rate yaitu data observasi dengan epok rapat dengan interval satu detik, hal ini dimaksudkan agar hasil yang diperoleh mempunyai ketelitian yang cukup tinggi. Raw data observasi GPS tersebut didapat secara otomatis dalam selang waktu 1 jam karena komputer server data diotomatisasi untuk mengupload data ke komputer pemrosesan data dan langsung diolah pada komputer pemrosesan data diawali dengan konversi dari format CRX ke format RINEX. Setelah dikonversi menjadi format RINEX lalu data observasi tersebut ditempatkan pada campaign di Bernese agar siap untuk diolah selanjutnya. Di bawah ini merupakan flowchart dari program upload data observasi GPS secara otomatis.
Gambar 3.4 Download RINEX
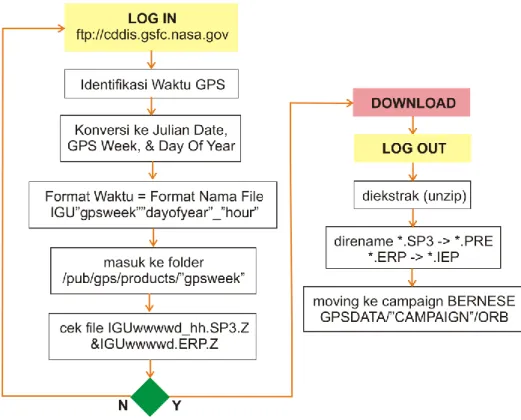
Informasi precise ephemerides yang digunakan adalah ultra rapid prediksi yang berformat SP3 dimana didalamnya berisi informasi koordinat satelit geosentrik dengan interval 15
menit. Informasi tersebut didownload via jaringan internet secara otomatis setiap 6 jam setiap harinya yaitu jam 03.00 UT, 09.00 UT, 15.00 UT, dan 21.00 UT sesuai dengan waktu terbit dari informasi orbit ultra rapid tersebut. Informasi eksternal lainnya yang dipakai adalah informasi rotasi bumi dan kutub dengan format ERP, file ini didownload bersamaan dengan file SP3. Kedua informasi tersebut adalah prediksi berdasarkan interpolasi dengan teknik lagrange. Setelah itu kedua file tersebut ditempatkan pada direktori informasi orbit pada campaign di Bernese agar siap untuk diolah selanjutnya. Di bawah ini merupakan flowchart dari program download data informasi orbit secara otomatis.
Gambar 3.5 Download IGS
Setelah semua data yang dibutuhkan terkumpul dan dimasukan ke dalam direktori campaign pada Bernese maka pengolahan data pun dapat segera dilakukan. Hal tersebut berlangsung secara otomatis dengan membuat skrip running BPE (Bernese Processing Engine) dengan modul kontrol PPP.PCF yang telah diset semua input dan outputnya sesuai dengan strategi pengolahan data untuk mengestimasi besarnya delay troposfer dan delay ionosfer. Skrip tersebut memanggil file RUNBPE secara otomatis ketika semua data telah terkumpul dan file RUNBPE tersebut memanggil program BPE untuk mengolah data sesuai dengan waktu secara realtime sehingga didapat hasil yang diinginkan sesuai dengan pengaturan pada modul
file kontrol prosesnya. PCF (Process Control Files) mengandung daftar skrip untuk dijalankan dalam urutan pendefinisian oleh server BPE. Program pilihan input diambil dari direktori yang dispesifikasi dalam PCF.
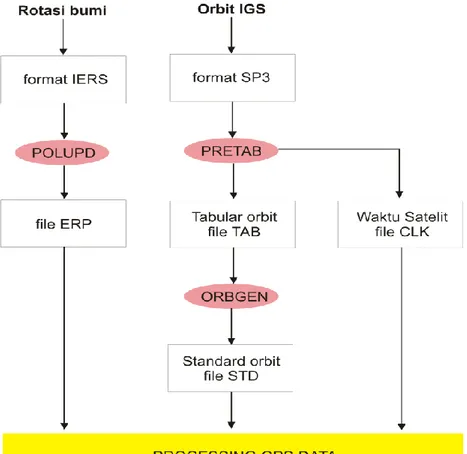
3.2.2 Pengolahan Data Informasi Orbit
Pada pengolahan data informasi orbit diperlukan data informasi parameter orientasi bumi dan pergerakan kutub untuk mentransformasikan posisi satelit ke dalam ruang inersia, maka dari itu sebelumnya harus dikonversi terlebih dahulu informasi tersebut dengan menggunakan skrip program POLUPD. Program POLUPD tersebut mengkonversi dari format IERS (International Earth rotation and Reference system Service) dengan ekstensi IEP ke format Bernese dengan ekstensi ERP.
Pada penggunaan perangkat lunak Bernese 5, pertama kali informasi orbit dengan ekstensi PRE diolah dengan skrip program PRETAB untuk mentransformasikan precise orbit dalam bentuk tabel yang dapat dibaca oleh perangkat lunak Bernese dengan ekstensi TAB. Program PRETAB mengubah posisi satelit dari sistem geosentrik terikat bumi ke sistem inersial J2000.0. Pada program ini informasi parameter rotasi bumi dan informasi pergerakan kutub dengan ekstensi ERP diolah bersamaan dengan informasi precise orbit untuk menjamin konsistensi orbit secara maksimum dengan kualitas yang bagus.
Di dalam skrip program PRETAB ini terdapat subprogram yang berfungsi mengekstrak informasi waktu satelit dengan ekstensi CLK dari precise orbit dan menuliskannya dalam format yang bisa dibaca oleh Bernese sehingga didapatkan koreksi waktu satelit pada interval 15 menit atau dapat diatur sesuai dengan kebutuhan.
Langkah selanjutnya yaitu dengan membuat standard orbit dengan menggunakan skrip program ORBGEN. Langkah tersebut digunakan untuk mengubah informasi orbit dari format tabular menjadi format standard dengan mengekstrapolasi orbit satelit sesuai dengan waktu yang dibutuhkan. Skrip program ORBGEN mengintegrasikan persamaan gerak menggunakan posisi yang diberikan dalam file orbit tabular untuk menghasilkan file orbit standar Bernese dengan ekstensi STD yang digunakan dalam semua pemrosesan program yang memerlukan informasi orbit. Di bawah ini merupakan diagram alir pengolahan data informasi orbit.
Gambar 3.6 Pengolahan data informasi orbit
3.2.3 Pengolahan Data Observasi GPS
Proses pengolahan data observasi GPS dibagi menjadi dua tahapan, yaitu : 1. Pre-processing data
Tahapan ini bertujuan untuk mengecek dan mempersiapkan data sebelum mengestimasi parameter yang dicari.
2. Estimasi Parameter
Tahapan ini merupakan tahapan utama dari pengolahan data dimana pada tahap ini ditentukan suatu nilai besaran dari parameter yang diestimasi, dalam hal ini parameter yang diestimasi adalah delay troposfer dan delay ionosfer.
3.2.3.1 Pre-processing Data
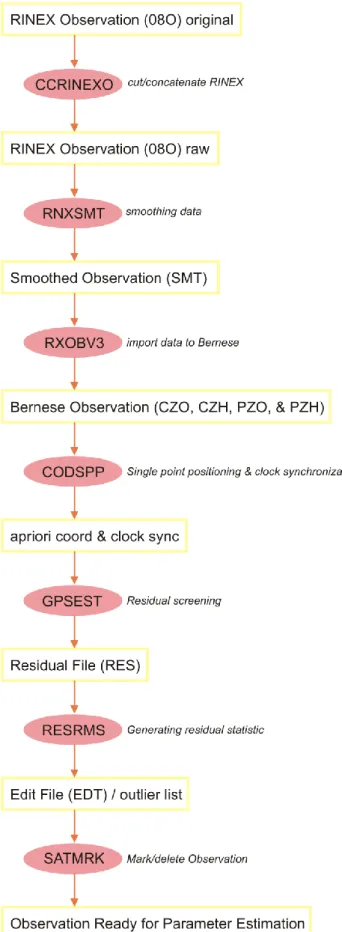
Sebelum dapat dilakukan pre-processing pada data, harus dilakukan terlebih dahulu persiapan data observasi pada folder campaign/ORX sehingga data tersebut dapat diakukan pre-processing. Hal pertama yang dilakukan adalah memotong dan atau menggabungkan data observasi dengan bantuan skrip program CCRINEXO sehingga didapat hasil observasi pada waktu tertentu dan dengan panjang waktu tertentu sesuai dengan yang dibutuhkan. Pada sistem ini panjang waktu observasi yang dipakai adalah satu jam dimana hal ini mempertimbangkan beberapa hal, yaitu :
1. Pengaturan dari receiver CORS GPS untuk data high rate dimana data terbentuk menjadi satu file CRX setiap 1 jam.
2. Data observasi satu jam dengan interval epok satu detik sudah dinilai cukup untuk dilakukan pengolahan data metode PPP.
3. Perubahan atmosfer sudah cukup smooth karena perubahan karakteristik dalam waktu satu jam relatif tidak terlalu signifikan.
4. Mempertimbangkan perubahan posisi satelit relatif terhadap receiver sudah mendapatkan layer atmosfer yang dinilai cukup untuk dianalisis.
Pada tahapan tersebut data RINEX akan disalin dari direktori ORX ke direktori RAW, yang akan diproses adalah file RINEX yang berada di direktori RAW sehingga tidak akan mengganggu data original RINEX yang berada di direktori ORX. Setelah tahapan tersebut lalu dilakukan langkah pertama pre-processing data yaitu smoothing data yang dilakukan oleh skrip RNXSMT pada Bernese. Tujuan dari langkah ini adalah untuk mendeteksi cycle slip dan outlier pada level RINEX dengan menggunakan simultan data kode dan data fase pada dua frekuensi terhadap setiap satelit.
Output dari proses smoothing data adalah file dengan ekstensi SMT. Proses smoohing data tersebut dibagi menjadi 4 tahapan, yaitu :
1. Penyaringan data dengan memakai kombinasi liner Melbourne-Wubbena (L6). Tujuannya adalah untuk mendeteksi outlier dan cycle slip.
2. Jika cycle slip terdeteksi, maka selanjutnya dipakai kombinasi linear geometry-free (L4). Tujuannya adalah untuk mengetahui besarnya cycle slip di kedua frekuensi dan menghubungkan data observasi sebelum dan setelah cycle slip.
3. Penyaringan data dengan memakai selisih dari kombinasi linear ionospheric-free (L3) antara pengamatan kode dengan fase. Tujuannya adalah untuk menghilangkan data observasi yang buruk yang tidak terdeteksi pada tahap sebelumnya.
4. Smoothing data observasi kode dengan menggunakan data fase dan data kode yang telah bersih dari tahapan sebelumnya.
Setelah data tersebut di smoothing maka data tersebut siap untuk di import ke Bernese dengan memakai skrip program RXOBV3. Hasilnya adalah file observasi Bernese dengan ekstensi CZO, CZH, PZO, dan PZH yang disimpan pada direktori campaign/OBS. Pada tahapan ini diperlukan diperlukan berbagai informasi seperti koordinat apriori stasiun pengamatan, informasi tentang stasiun berikut dengan informasi receiver dan antena yang dipakai dan juga koreksi fase antena dan juga tinggi antena.
Koordinat pendekatan pun menjadi masukan penting bagi beberapa skrip program termasuk RXOBV3. Dalam sistem ini koordinat pendekatan yang diberikan pada file berekstensi CRD didapat dari hasil pengolahan sebelumnya, dimana stasiun pengamatan ITB1 diolah datanya sepanjang 10 hari secara differensial yang diikatkan ke stasiun BAKO milik BAKOSURTANAL. Hasil koordinatnya dimasukkan sebagai koordinat fix dari stasiun ITB1 dengan file berekstensi CRD dimana file ini selalu dipakai untuk mengestimasi bias dari troposfer dan bias dari ionosfer.
Sebelum data tersebut masuk ke dalam proses estimasi parameter, skrip program CODSPP digunakan terlebih dahulu untuk mensinkronisasikan jam receiver dan juga untuk pre-processing pengamatan kode. Skrip ini pun menentukan koordinat apriori dari stasiun dengan pendekatan single point positioning untuk dipakai pada tahapan estimasi parameter. Outlier dalam pengamatan dapat dideteksi dalam tahap ini juga.
Skrip program CODSPP sebenarnya merupakan estimasi parameter sederhana dengan menggunakan perataan least-square. Parameter utama yang diestimasi pada tahap ini adalah kesalahan jam receiver dimana hasilnya adalah koreksi untuk kesalahan tersebut sehingga data observasinya bebas dari kesalahan tersebut.
Tahapan terakhir dari pre-processing data adalah proses pembersihan data setiap stasiun, hal ini dilakukan karena langkah smoothing data hanya bisa menghilangkan outlier hanya dalam
level meter. Ada tiga skrip program yang dipakai dalam tahap ini, yaitu GPSEST, RESRMS, dan SATMRK. Skrip program GPSEST digunakan untuk menghasilkan file residual dari data screening, berdasarkan kombinasi linear ionospheric-free (L3). Setelah file residual didapatkan dari output program GPSEST maka dilanjutkan dengan program RESRMS untuk membangun analisis statistik dari stasiun pengamatan berdasarkan file residu yang dikeluarkan oleh program GPSEST. Hasil dari running program RESRMS ini adalah file berekstensi EDT (Edit file) yang berisi daftar dari pengamatan yang teridentifikasi sebagai outlier. File EDT tersebut dijadikan input untuk pengolahan selanjutnya dengan program SATMRK dimana skrip program tersebut bertujuan untuk menandai atau menghapus observasi yang teridentifikasi sebagai outlier pada program sebelumnya. Di bawah ini merupakan diagram alir rangkuman dari tahapan pre-processing di atas.
3.2.3.2 Estimasi Parameter
Tahapan estimasi parameter adalah tahapan utama dalam sistem ini karena nilai dari TEC (Total Electron Content) dan ZTD (Zenith Tropospheric Delay) didapat dari hasil tahapan ini. Tahapan ini menggunakan skrip program GPSEST dimana pada prinsipnya skrip program ini menggunakan teknik estimasi dengan least-square. Tahapan ini dilakukan dengan dua kali iterasi dimana iterasi pertama untuk mengestimasi nilai dari ZTD dan iterasi kedua untuk mengestimasi nilai dari TEC.
Pada iterasi pertama nilai dari ZTD didapat dengan memakai memakai kombinasi linear ionospheric-free (L3) sehingga pengaruh ionosfer tidak dimasukkan dalam penghitungan. Ketika kesalahan waktu receiver telah hilang maka yang tersisa adalah kesalahan akibat pengaruh troposfer dan hal tersebutlah yang menjadi output dari iterasi pertama ini. Nilai ZTD dikeluarkan oleh GPSEST dengan file berekstensi TRO dimana didalamnya terdapat informasi total dari ZTD berikut dengan rms nya.
Iterasi kedua dilakukan dengan menggunakan kombinasi linear geometric-free (L4). Penggunaan L4 dianjurkan dalam hal pembuatan model ionosfer sehingga penulis memakai kombinasi linear tersebut. Kombinasi tersebut mereduksi pengaruh dari kesalahan geometrik, jam satelit dan jam receiver. Informasi bias troposfer dalam file berekstensi TRO yang dikeluarkan dalam iterasi sebelumnya menjadi salah satu input dari tahapan ini, tujuannya adalah supaya bias troposfernya hilang dan yang tersisa hanyalah kesalahan yang diakibatkan oleh bias ionosfer. Bias ionosfer tersebutlah yang diestimasi dan dikeluarkan dalam file berekstensi ION yang didalamnya terdapat informasi dari jumlah TEC dalam satuan TECU.
3.3 Penentuan Nilai PWV dan TEC
Dari suatu besaran bias troposfer dan bias ionosfer bisa dikonversi menjadi besaran PWV (Precipitable Water Vapour) dan TEC (Total Electron Content). Hal itu akan dijelaskan dalam bagian ini.
3.3.1 Penentuan Nilai PWV (Precipitable Water Vapour)
Seperti telah dijelaskan pada bab sebelumnya bahwa besaran ZTD dapat diestimasi dengan menghitung selisih antara komponen tinggi koordinat fix dari titik pengamatan dengan komponen tinggi koordinat hasil estimasi tanpa dikoreksi bias troposfernya. Hal tersebut bisa dilakukan oleh software Bernese.
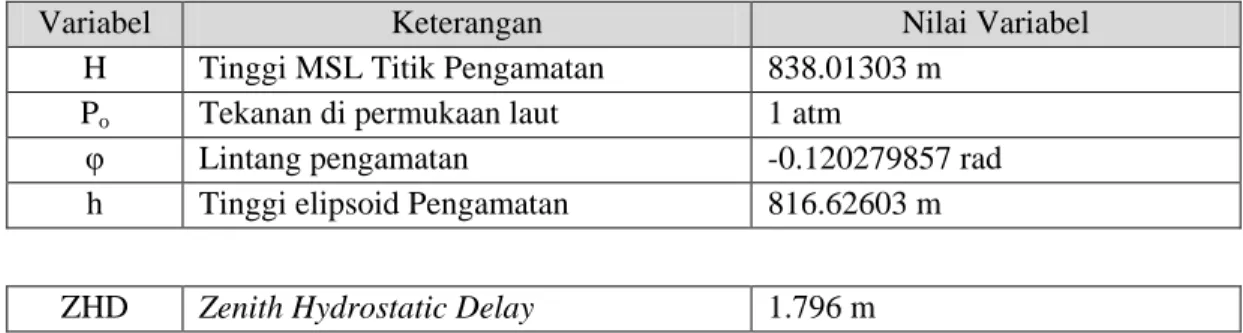
ZTD atau (Zenith Tropospheric Delay) terdiri dari gabungan antara ZHD (Zenith Hydrostatic Delay) dan ZWD (Zenith Wet Delay). Untuk mendapatkan nilai dari ZWD maka data ini dikurangkan dengan ZHD, dimana ZHD itu sendiri dihitung dengan persamaan 2.30 dan 2.31. Berikut hasil hitungannya :
Tabel 3.1 Nilai ZHD (Zenith Hydrostatic Delay)
Variabel Keterangan Nilai Variabel
H Tinggi MSL Titik Pengamatan 838.01303 m
Po Tekanan di permukaan laut 1 atm
φ Lintang pengamatan -0.120279857 rad
h Tinggi elipsoid Pengamatan 816.62603 m
ZHD Zenith Hydrostatic Delay 1.796 m
Besaran ZHD ini bervariasi secara temporal tetapi perubahannya tidak signifikan, oleh karena itu besaran tersebut dapat diasumsikan konstan. Dalam sistem ini digunakan nilai
1.796 m sebagai nilai ZHD. Nilai tersebut digunakan untuk menghitung nilai dari PWV
(Precipitable Water Vapour) dimana nilai PWV dihitung dari pengalian besaran ZWD dengan suatu faktor konversi . ZWD sendiri dihitung dengan menghitung selisih dari ZTD dengan nilai ZHD yang dianggap konstan. Nilai dari adalah fungsi dari berat jenis air, konstanta gas, bobot temperatur atmosfer rata-rata. Variabel-variabel tersebut bersifat konstan sehingga nilai pun menjadi sebuah konstanta. Pada sistem ini nilai dari faktor konversi dipakai 0.15 berdasarkan penghitungan Emardson dan Derks (1999) [Dikutip oleh Permana, 2002].
3.3.2 Penentuan Nilai TEC (Total Electron Content)
Berbeda halnya dengan penentuan PWV yang diekstrak dari informasi bias yang terjadi di troposfer, penentuan nilai dari TEC yang merupakan fungsi dari bias ionosfer dan frekuensi dari gelombang elektromagnetik sudah dilakukan secara langsung oleh software Bernese, informasi jumlah elektron pada ionosfer diberikan oleh output tahapan estimasi parameter dengan file berekstensi INX.
3.4 Plotting PWV dan TEC
Proses visualisasi hasil pada sistem ini menggunakan bantuan software GMT (Generic Mapping Tools) versi linux dimana software ini akan memplot data hasil secara otomatis.
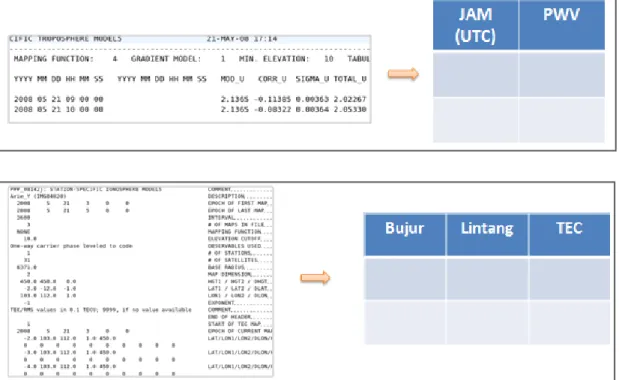
Ada sebuah tahapan penting sebelum masuk dalam proses plotting, yaitu proses screening data yang isinya berupa konversi dari file hasil pengolahan Bernese sehingga bisa dibaca dan diproses oleh GMT. Proses screening tersebut dibuat dalam bentuk skrip program dengan bahasa pemrograman PERL yang otomatis berjalan ketika data hasil pengolahan Bernese didapat. Di bawah ini adalah visualisasi dari proses screening tersebut.
3.4.1 Plotting PWV (Precipitable Water Vapour)
Proses plotting data hasil pengolahan PWV diberikan dalam sebuah grafik 2D yang diupdate setiap jam dimana grafik tersebut menggambarkan variasi temporal dari PWV.
3.4.2 Plotting TEC (Total Electron Content)
Berbeda halnya dengan proses plotting PWV, proses plotting TEC diberikan dalam sebuah peta TEC dimana terdapat isoline yang merupakan informasi dari nilai TEC. Nilai TEC didapat tiap jam dengan titik–titik hasil interpolasi dengan interval grid 1˚ searah lintang dan 1˚ searah garis bujur. Peta TEC tersebut dibatasi oleh garis lintang -2˚ di arah utara, garis lintang -12˚ di arah selatan, garis bujur 103˚ di arah barat, dan garis bujur 112˚ di arah timur. Batas tersebut berjarak ±5˚ kesetiap arah mata angin dari titik pengamatan.