PEMBUATAN ALAT BANTU JALAN UNTUK TUNANETRA MENGGUNAKAN SENSOR ULTRASONIK DENGAN OUTPUT SUARA SKRIPSI HOTRINI SITANGGANG
Bebas
56
0
0
Teks penuh
(2) iv. PEMBUATAN ALAT BANTU JALAN UNTUK TUNANETRA MENGGUNAKAN SENSOR ULTRASONIK DENGAN OUTPUT SUARA. SKRIPSI Diajukan untuk melengkapi tugas dan melengkapi syarat mencapai gelar Sarjana Sains. HOTRINI SITANGGANG 160801068. DEPARTEMEN FISIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA MEDAN 2021.
(3) i.
(4) PERNYATAAN. Pembuatan Alat Bantu Jalan Untuk Tunanetra Menggunakan Sensor Ultrasonik Dengan Output Suara. SKRIPSI. Saya mengaku bahwa skripsi ini adalah hasil karya sendiri. Kecuali beberapa kutipan dari ringkasan yang masing-masing disebutkan sumbernya.. Medan,. April 2021. Hotrini Sitanggang. ii.
(5) PENGHARGAAN. Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas segala berkat dan karuniaNya, sehingga penulis dapat menyelesaikan skripsi yang berjudul “PEMBUATAN ALAT BANTU JALAN UNTUK TUNSNETRA MENGGUNAKAN SENSOR ULTRASONIK DENGAN OUTPUT SUARA” skripsi ini disusun sebagai syarat akademis dalam menyelesaikan studi program strata satu (S1) Fisika Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. Penulis menyadari bahwa selama proses hingga terselesaikannya penyusunan skripsi ini, banyak mendapat masukan maupun motivasi dari berbagai pihak. Dengan kerendahan hati, penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya atas segala bantuan, dukungan, semangat yang telah diberikan. Oleh karena itu, dalam kesempatan ini, penulis ingin menyampaikan rasa terima kasih kepada : . Bapak Dr. Krista Sebayang, MS sebagai dekan FMIPA USU.. . Bapak Dr. Perdinan Sinuhaji, MS sebagai ketua Departemen Fisika FMIPA USU.. . Bapak Awan Maghfirah, S.Si, M.Si sebagai sekretaris Departemen Fisika FMIPA USU.. . Bapak Prof.Dr. Nasrudin MN, M.Eng,Sc sebagai Dosen Pembimbing yang telah banyak memberikan kritik dan saran, masukan, serta ide-ide selama penulis mengerjakan skripsi ini.. . Seluruh Bapak/Ibu dosen Fisika Universitas Sumatera Utara yang telah mendidik dan mengajar selama kurang lebih 4 Tahun sehingga penulis mampu mencapai gelar Sarjana.. . Terutama buat orang tua tercinta Alm. Elias Sitanggang dan Nayur Sihaloho yang sudah banyak memberikan motivasi, semangat, doa-doa, materi bahkan saat pandemi rela meminjam uang kesana-kemari demi memenuhi kebutuhanku dalam proses Tugas Akhir ini, dan hal-hal lainnya yang tidak dapat kusebutkan.. iii.
(6) . Saudara-saudara saya, Abang saya Natanael Sitangang, Defson Sitanggang, Jimmy Sitanggang, Gokbos Sitanggang, juga Kakak saya Santri Sitanggang, juga abang dan kakak ipar saya yang sudah banyak membantu dan memberi semangat kepada penulis selama mengerjakan skripsi ini, terutama buat Kakak saya Berli Sitanggang dan Tirtayana Sitanggang yang telah banyak memberikan motivasi, dukungan, semangat dan bantuan materi dalam menyelesaikan skripsi ini.. . Anggota GEMATALAS FMIPA USU, abang, kakak dan adik yang telah memberikan semangat kepada penulis selama menyelesaikan skripsi ini.. . Teman satu stambuk saya, Fisika 2016 terkhususnya Physics Reform, yang paling saya sayangi, terimakasih karena sudah mau berjuang bersama dalam menyelesaikan masa kuliah kita semuanya dan terimakasih atas dukungan dan bantuaanya selama menyelesaikan skripsi ini.. . Teman-teman seperKKNan KLB yakni Amel, Supeto, Mira, Siti, Mawad, Tasa, Ulfa, Yusma, Tammy, Tama, Muher, Bg Hafish yang telah mendukung saya dan memberikan semangat kepada saya .. . Teman seperdopingan Regina Sri Rejeki Simbolo dan teman seperjuangan Theresia Silalahi terimakasih atas semua dukungan dan bantuannya.. Tugas Akhir ini penulis dedikasikan untuk mereka sebagai ungkapan penghargaan atas keikhlasan, kesabaran, kebaikan dan kasih sayang yang teramat dalam dan hanya Tuhan yang Maha Esa yang dapat membalasnya. Penulis menyadari bahwa skripsi ini masih jauh dari sempurna, untuk itu Penulis mengharapkan kritik dan saran yang membangun demi penyempurnaan skripsi ini. Akhir kata Penulis mengucapkan terimakasih dan semoga skripsi ini bermanfaat bagi orang yang membutuhkan.. Medan, April 2021. Hotrini Sitanggang. iv.
(7) PEMBUATAN ALAT BANTU JALAN UNTUK TUNANETRA MENGGUNAKAN SENSOR UlTRASONIK DENGAN OUTPUT SUARA. ABSTRAK. Telah dirancang dan dibuat alat bantu jalan tunanetra menggunakan sensor ultrasonik HC-SR04 dengan output suara. Pusat kontrol dari sistem ini adalah mikrokontroler Atmega 328. Alat ini terdiri dari sensor ultrasonik HC-SR04 yang telah dirancang untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. DFPlayer mini sebagai file player dari output suara yang telah direkam dan disimpan di SD Card. Dimana DFPlayer mini merupakan sebuah modul pemutar MP3 untuk Arduino dan outputnya dapat langsung dipasangkan ke speaker. Cara kerja sistem adalah kedua sensor ultrasonik mendeteksi jarak objek dan memberikan data pada mikrokontroler untuk dikalibrasi menjadi nilai sebenarnya. Setelah dikalibrasi kedua data dibandingkan dengan suatu acuan dan digunakan untuk memberikan output berupa ucapan suara melalui speaker. Kata Kunci: Sensor Ultrasonik HC-SR04, Atmega328, DFPlayer Mini.. v.
(8) MAKING ROAD AID TOOLS FOR TUNANETRA USING ULTRASONIC SENSOR WITH SOUND OUTPUT. ABSTRACT A visual aid for the visually impaired has been designed using the HC-SR04 ultrasonic sensor with sound output. The control center of this system is the Atmega 328 microcontroller. This tool consists of an HC-SR04 ultrasonic sensor which has been designed to interpret the existence (distance) of an object with a certain frequency. DFPlayer mini as a file player from the sound output that has been recorded and stored on the SD Card. Where DFPlayer mini is an MP3 player module for Arduino and the output can be directly attached to the speaker. The way the system works is that both ultrasonic sensors detect the distance of the object and provide data to the microcontroller to be calibrated to the true value. After calibration the two data are compared with a reference and used to provide output in the form of voice speech through the speaker. Key Words: Ultrasonic Sensor HC-SR04, Atmega328, DFPlayer Mini.. vi.
(9) DAFTAR ISI. Halaman Persetujuan. i. Pernyataan. ii. Penghargaan. iii. Abstrak. v. Abstrack. vi. Daftar Isi. vii. Daftar Tabel. ix. Daftar Gambar. x. BAB I. BAB II. PENDAHULUAN 1.1 Latar Belakang. 1. 1.2 Rumusan Masalah. 2. 1.3 Batasan Masalah. 2. 1.4 Tujuan Penelitian. 2. 1.5 Manfaat Penelitian. 3. 1.6 Sistematika Penulisan. 3. TINJAUAN PUSTAKA 2.1 Tunanetra. 5. 2.2 Arduino Uno. 6. 2.2.1 Sumber daya Arduino. 8. 2.2.2 Software Arduino. 9. 2.3 Sensor Ultrasonik HC-SR04. 10. 2.4 DFPlayer Mini. 13. 2.5 Speaker. 15. vii.
(10) 2.6 Baterai. 16. 2.7 SD Card. 17. 2.8 Dioda. 18. 2.9 Resistor. 19. 2.10 Kapasitor. 19. BAB III METODOLOGI PENELITIAN 3.1 Diagram Blok. 21. 3.2 Flowchart. 23. BAB IV HASIL DAN PEMBAHASAN 4.1 Hasil penelitian. 25. 4.2 Pengujian Sistem. 26. 4.2.1 Pengujian sensor ultrasonik. 26. 4.2.2 Pengujian modul DFPlayer. 30. 4.2.3 Pengujian mikrokontroler arduino uno. 32. 4.2.4 Pengujian Catu Daya Sistem. 34. 4.2.5 Pengujian Secara Keseluruhan. 34. BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan. 36. 5.2 Saran. 36. DAFTAR PUSTAKA LAMPIRAN. viii.
(11) DAFTAR TABEL Tabel 2.1 Spesifikasi Arduino Uno. 7. Tabel 2.2 Keterangan Port DFPlayer Mini. 15. Tabel 4.1 Hasil Pengujian Sensor Ultrasonik 1. 29. Tabel 4.2 Hasil Pengujian Sensor Ultrasonik 2. 29. Tabel 4.3 Hasil Pengujian Modul DFPlayer. 32. Tabel 4.4 Hasil Pengukuran Pin Arduino Uno. 33. Tabel 4.5 Hasil Pengukuran Catu Daya dan Regulator. 34. Tabel 4.6 Hasil Pengujian Keseluruhan. 35. ix.
(12) DAFTAR GAMBAR Gambar 2.1 Arduino Uno. 7. Gambar 2.2 Kabel USB Bord Arduino uno. 8. Gambar 2.3 Sensor Ultrasonik HC-SR04. 11. Gambar 2.4 Rangkaian Pemancar Gelombang Ultrasonik. 11. Gambar 2.5 Rangkaian penerima gelombang ultrasonik. 13. Gambar 2.6 DFPlayer Mini. 14. Gambar 3.1 Diagram Blok. 21. Gambar 3.2 Flowchart. 23. Gambar 4.1 Hasil Rancangan Tongkat Pemandu Jalan tunanetra. 25. Gambar 4.2 Tampilan Hasil Pengukuran Sensor Ultrasonik 1 dan 2. 28. x.
(13) BAB 1 PENDAHULUAN. 1.1. Latar Belakang Perkembangan teknologi saat ini yang berkembang sangat pesat dan semakin canggih. Perkembangan teknologi memberi banyak keuntungan dan manfaat dalam memenuhi kebutuhan manusia, baik dalam bidang informasi, komunikasi, transportasi dan bidang lainnya. Kemajuan teknologi mempunyai dampak positif dan dampak negatif, untuk dampak negatif manusia menjadi malas dalam beraktifitas karena semua aktifitasnya bisa dikerjakan dengan mudah dengan bantuan teknologi, disisi lain dampak positif membuat manusia dapat beraktifitas normal dengan segala bentuk kekurangannya. Contohnya dalam indra penglihatan. Indra penglihatan merupakan organ vital setiap manusia. Sebagian besar informasi dapat diperoleh melalui indra penglihatan dan sisanya empat panca indra yang lain. Dapat dibayangkan apabila seseorang mempunyai kekurangan atau indra penglihatan tidak normal seperti manusia normal pada umumnya, bagi mereka akan kesulitan untuk mendapat informasi khususnya informasi untuk bernavigasi atau berjalan. Sebagian besar para tunanetra menggunakan tongkat untuk membantunya berjalan menyusuri tujuan yang akan dicapai. Pada kesempatan ini penulis akan mencoba merancang dan membuat sebuah alat bantu jalan untuk tunanetra menggunakan sensor ultrasonik dengan output suara. Input untuk alat adalah benda atau objek yang dapat memantulkan gelombang ultrasonik yang kemudian memberikan output berupa ucapan suara manusia yang memberikan informasi atau peringatan pada pengguna alat, dengan demikian para. tunanetra dapat merasa lebih nyaman, aman berjalan dengan. menggunakan alat bantu ini. Kelebihan alat pendeteksi halangan ini adalah dapat membedakan objek berukuran besar atau kecil yang menjadi penghalang didepan. Dengan menggunakan 2 buah sensor ultrasonik ukuran objek dapat dibedakan. Penempatan sensor dibuat satu dibagian bawah tongkat dan 1 dibagian atas tongkat. Jika hanya sensor bawah yang mendeteksi penghalang, maka penghalang tersebut memiliki ketinggian yang rendah misalnya trotoar atau batu dan 1.
(14) 2. sebagainya sehinngga bisa dilangkahi. Namun jika kedua sensor mendeteksi objek secara bersamaan maka objek dapat dikenali sebagai penghalang berukuran besar contohnya tembok, pagar atau kenderaan bermotor sehingga pengguna alat harus mengubah arah. Demikianlah kondisi yang melatar-belakangi penulis untuk mengambil topik ini sebagai penelitian dengan harapan dapat memberikan manfaat khususnya para penyandang tuna netra.. 1.2. Rumusan masalah 1. Bagaimana merancang sebuah alat bantu jalan tunanetra dengan komponen elektronik. 2. Bagaimana mendeteksi objek didepan yang dapat membedakan ukuran objek dengan sensor yang digunakan. 3. Bagaimana membuat agar output dapat berupa ucapan suara manusia. 4. Bagaimana membuat algoritma program untuk merealisasikan sistem pemandu jalan yang dibuat.. 1.3. Batasan masalah 1. Rancangan menggunakan 2 buah sensor jarak ultrasonik SR04 untuk mendetekasi objek penghalang. 2. Pemrograman dibuat dengan bahasa pemrograman C dalam lingkup Arduino I.D.E versi 1.8.10. 3. Penggunaan mikrokontroler atmega 328 dengan modul arduino uno sebagai pengendali utama. 4. Menggunakan modul MP3 player untuk memainkan file suara sebagai output.. 1.4. Tujuan penelitian 1. Merancang sebuah alat bantu jalan untuk tuna netra dengan komponen elektronik. 2. Menemukan cara efektif untuk mendeteksi penghalang atau objek didepan 3. Mencari cara untuk memberitahukan pengguna hasil pembacaan sensor berupa output suara manusia. 4. Membuat algoritma program untuk merealisasikan sistem yang dibuat..
(15) 3. 1.5. Manfaat penelitian 1. Bagi penulis adalah untuk menambah ilmu pengetahuan mengenai Konsep perancangan suatu sistem elektronik dengan memanfaatkan sensor yang ada serta menyelesaikan Tugas Akhir sebagai persyaratan kelulusan. 2. Bagi Masyarakat terutama kaum tuna netra adalah : a. Memudahkan para tunanetra untuk menentukan arah dan berjalan. b. Menyakinkan pejalan kaki tunanetra menuju tujuan yang diinginkan.. 1.6. Sistematika Penulisan Penulisan Laporan Akhir ini memiliki peranan sangat penting agar pembaca dapat mudah memahami terhadap isi yang terkandung didalamnya. Untuk mempermudah sistematika penulisan, penulis membagi dalam beberapa bab pembahasan dengan urutan sebagai berikut :. HALAMAN JUDUL HALAMAN PENGESAHAN KATA PENGANTAR ABSTRAK DAFTAR ISI DAFTAR GAMBAR DAFTAR TABEL DAFTAR SINGKATAN. BAB I PENDAHULUAN. Pada bab ini Penulis mengemukakan secara garis besar mengenai Latar Belakang, Tujuan dan Manfaat, Perumusan Masalah, Batasan Masalah, Metodelogi Penulisan serta Sistematika Penulisan.. BAB II TINJAUAN PUSTAKA. Pada bab ini akan berisi mengenai teori yang mendukung tentang perancangan sistem dan komponen - komponen yang digunakan. Adapaun teori pendukung dalam penelitian yaitu mencakup tentang komponen-komponen yang digunakan..
(16) 4. BAB III METODE PENELITIAN. Bab ini membahas tentang perancangan alat, diagram blog, penjelasan fungsi kerja dari alat dan Diagram alir.. BAB IV PEMBAHASAN. Pada bab ini akan diuraikan mengenai hasil-hasil dari pengujian yang berhubungan dengan alat yang dirancang dalam laporan ini.. BAB V KESIMPULAN DAN SARAN. Pada bab ini berisi kesimpulan yang merupakan jawaban dari tujuan dan saran dari penulis berdasarkan hasil perancangan, penganalisaan yang didapat selama pembuatan alat untuk pengembangan lebih lanjut.. DAFTAR PUSTAKA. LAMPIRAN.
(17) BAB II TINJAUAN PUSTAKA. 2.1. Tunanetra Tunanetra adalah orang yang memiliki keterbatasan pada indera. penglihatannya. atau. bahkan. memiliki. ketidakmampuan. untuk. melihat.. Berdasarkan tingkat kebutaannya, tunanetra dibedakan menjadi 2 kelompok yaitu buta total dan low vision. Sedangkan berdasarkan usia kebutaan, dibedakan menjadi: buta sejak lahir dan buta tidak sejak lahir (sempat memiliki pengalaman untuk melihat baru kemudian mengalami kebutaan). Keterbatasan atau bahkan ketidakmampuan seorang tunanetra untuk melihat, mengakibatkan keterbatasan atau bahkan ketidakmampuan pula dalam menerima stimulus/informasi melalui indra penglihatan (mata). Oleh karena itu, diperlukan peran alat indra yang lain untuk menggantikannya. Dalam hal ini indra pendengar (telinga) serta indra peraba (tangan) menjadi alternatif utama dalam penerimaan stimulus/informasi dari luar. Dengan menerima informasi/stimulus dalam bentuk suara, baik yang bersumber dari objek itu sendiri maupun berasal dari orang lain di sekitar, dapat menambah pengetahuan bagi seorang tunanetra. Sebagai contoh, seorang tunanetra ingin mengetahui tentang binatang burung, karena tidak memungkinkan untuk merabanya secara langsung maka mereka dapat menanyakan kepada orang di sekitar untuk memberikan deskripsi binatang tersebut. Kemudian, dengan mendengarkan suara burung secara langsung dapat memberikan tambahan informasi bagi mereka. Selain pendengaran, indra peraba (tangan) sebagai alternatif lain untuk menerima informasi dapat membantu seorang tuna netra dalam mendeskripsikan bentuk, berat, ukuran, suhu, serta letak/posisi suatu benda/objek. Tangan juga berperan sebagai “mata” bagi seorang tunanetra untuk membaca tulisan yang berbentuk Braille. Selanjutnya, indra-indra yang lain seperti indra perasa (lidah) dan indra penciuman (hidung) digunakan sebagai pelengkap informasi yang telah didapat melalui pendengaran (telinga) dan rabaan (tangan). Kedua indra pendengar dan peraba yaitu telinga dan tangan memberikan. 5.
(18) 6. kontribusi yang sangat penting bagi seorang tunanetra dalam penerimaan informasi. Namun tetap saja keduanya masih memiliki kekurangan. Sebagai contoh, indra pendengaran tidak dapat menberikan informasi yang kongkrit mengenai kualitas serta warna suatu benda/objek. Selain itu, informasi berupa suara dapat terdistorsi oleh suara lain disekitar serta bersifat sementara atau terbatas oleh waktu. Oleh karenanya diperlukan konsentrasi penuh saat mendengarkan informasi yang di dapat. Serupa dengan indra pendengar, indra peraba juga memiliki kekurangan. Kelemahan utama dari rabaan terletak pada aspek ukuran serta posisi/letak suatu objek. Seorang tunanetra akan merasa kesulitan untuk meraih/menyentuh suatu objek/benda apabila suatu objek/benda berukuran sangat besar (seperti gajah, pesawat, atau kereta api) atau jika objek/benda tersebut lerletak di tempat yang cukup jauh (tidak terjangkau). Dalam matematika, saat mempelajari tentang geometri terutama meteri tentang bangun datar, siswa tunanetra akan lebih menggunakan indera peraba mereka. Contohnya, untuk memahami suatu bentuk bangun datar, mereka harus dapat menganalisis setiap bagian dari bangun tersebut secara seksama dengan menggunakan rabaan yang meliputi: bagaimana sisi-sisinya; adakah sisi yang memiliki panjang yang sama; bagaimana sudutnya; dll. Ada dua cara untuk mengenalkan suatu benda/objek pada seorang tunanetra, yaitu secara sintetik dan analitik. Pada persepsi sintetik, suatu objek/benda akan dianalisis secara keseluruhan dengan menggunakan satu ataupun kedua tangannya yang kemudian masing-masing bagian objek/benda tersebut akan terdeskripsikan. Sebaliknya pada persepsi analitik, objek/benda tidak dianalisis secara keseluruhan dikarenakan ukurannya yang terlalu besar atau terlalu jauh. Apabila suatu objek/benda berukuran besar atau letaknya terlalu jauh untuk dapat diraih, mereka akan diberikan suatu model atau replika yang memiliki karakteriktik yang sama dengan benda aslinya. Hal tersebut membantu mereka menjelaskan sesuatu yang abstrak dan menjadikannya konkrit.. 2.2. Arduino Uno Arduino Uno adalah board berbasis mikrokontroler pada ATmega328.. Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack.
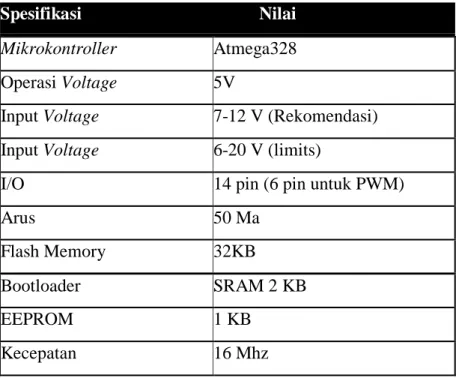
(19) 7. listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC-DC atau baterai untuk menggunakannya.. Tabel 2.1 Spesifikasi Arduino Uno Spesifikasi. Nilai. Mikrokontroller. Atmega328. Operasi Voltage. 5V. Input Voltage. 7-12 V (Rekomendasi). Input Voltage. 6-20 V (limits). I/O. 14 pin (6 pin untuk PWM). Arus. 50 Ma. Flash Memory. 32KB. Bootloader. SRAM 2 KB. EEPROM. 1 KB. Kecepatan. 16 Mhz. Board Arduino Uno memiliki fitur-fitur sebagai berikut: 1,0 pinout: tambah SDA dan SCL pin yang dekat ke pin aref dan dua pin baru lainnya ditempatkan dekat ke pin RESET, dengan IO REF yang memungkinkan sebagai buffer untuk beradaptasi dengan tegangan yang disediakan dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan prosessor yang menggunakan AVR, yang beroperasi dengan 5V dan dengan Arduino Karena yang beroperasi dengan 3.3V. Yang kedua adalah pin tidak terhubung, yang disediakan untuk tujuan pengembangannya. Circuit Reset. Gambar 2.1 Arduino Uno.
(20) 8. Gambar 2.2 Kabel USB Board Arduino Uno. 2.2.1 Sumber Daya Arduino Uno Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber listrik dipilih secara otomatis. Eksternal (non-USB) daya dapat datang baik dari AC-DC adaptor atau baterai. Adaptor dapat dihubungkan dengan cara menghubungkannya plug pusat-positif 2.1mm ke dalam board colokan listrik. Lead dari baterai dapat dimasukkan ke dalam header pin Gnd dan Vin dari konektor Power. Board dapat beroperasi pada pasokan daya dari 6 - 20 volt. Jika diberikan dengan kurang dari 7V, bagaimanapun, pin 5V dapat menyuplai kurang dari 5 volt dan board mungkin tidak stabil. Jika menggunakan lebih dari 12V, regulator tegangan bisa panas dan merusak board. Rentang yang dianjurkan adalah 7 - 12 volt. Pin catu daya adalah sebagai berikut: . VIN. Tegangan input ke board Arduino ketika menggunakan sumber daya eksternal (sebagai lawan dari 5 volt dari koneksi USB atau sumber daya lainnya diatur). Anda dapat menyediakan tegangan melalui pin ini, atau, jika memasok tegangan melalui colokan listrik, mengaksesnya melalui pin ini.. . 5V. Catu daya diatur digunakan untuk daya mikrokontroler dan komponen lainnya di board. Hal ini dapat terjadi baik dari VIN melalui regulator onboard, atau diberikan oleh USB .. . 3,3 volt pasokan yang dihasilkan oleh regulator on-board. Menarik arus maksimum adalah 50 mA.. . GND Selain itu, ATmega328 ini memiliki memory 32 KB dengan 0,5 KB. digunakan untuk loading file. Atmega328 juga memiliki 2 KB dari SRAM dan 1.
(21) 9. KB dari EEPROM. Input dan output masing-masing dari 14 pin digital pada Uno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Mereka beroperasi di 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor pull-up internal dari 20-50 K . Selain itu, beberapa pin memiliki fungsi khusus: . Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data TTL serial. Pin ini terhubung ke pin yang sesuai dari chip ATmega8U2 USB-to-Serial TTL.. . Eksternal Interupsi: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interupsi pada nilai yang rendah, tepi naik atau jatuh, atau perubahan nilai. Lihat attachInterrupt () fungsi untuk rincian.. . PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan 8-bit output PWM dengan analogWrite () fungsi.. . SPI: 10 (SS), 11 (mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan perpustakaan SPI.. . LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin adalah nilai TINGGI, LED menyala, ketika pin adalah RENDAH, itu off. Uno memiliki 6 input analog, diberi label A0 melalui A5, masing-masing menyediakan 10 bit resolusi yaitu 1024 nilai yang berbeda. Secara default sistem mengukur dari tanah sampai 5 volt.. . TWI: A4 atau SDA pin dan A5 atau SCL pin. Mendukung komunikasi TWI. . Aref. Referensi tegangan untuk input analog. Digunakan dengan analogReference ().. . Reset.. 2.2.2 Software Arduino Sehubungan dengan pembahasan untuk saat ini software Arduino yang akan digunakan adalah driver dan IDE, walaupun masih ada beberapa software lain yang sangat berguna selama pengembangan Arduino. IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari: •. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Microcontroller..
(22) 10. •. Compiler,. sebuah. modul. yang. mengubah. kode. program. (bahasa. Microcontroller) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa memahami bahasa Microcontroller. Yang bisa dipahami oleh : . microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.. . Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam memory di dalam papan Arduino.. 2.3 Sensor Ultrasonik HC-SR04 Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz. Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama. Ada beberapa penjelasan mengenai gelombang ultrasonic. Sifat dari gelombang ultrasonik yang melalui medium menyebabkan getaran partikel dengan medium amplitudo sama dengan arah rambat longitudinal sehingga menghasilkan partikel medium yang membentuk suatu rapatan atau biasa disebut Strain dan tegangan yang biasa disebut Strees. Proses lanjut yang menyebabkan terjadinya.
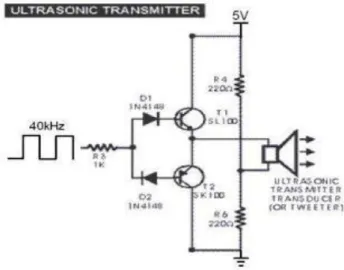
(23) 11. rapatan dan regangan di dalam medium disebabkan oleh getaran partikel secara periodic selama gelombang ultrasonic lainya. Gelombang ultrasonic merambat melalui udara dengan kecepatan 344 meter per detik, mengenai obyek dan memantul kembali ke sensor ultrasonik. Seperti yang telah umum diketahui, gelo mbang ultrasonik hanya bisa didengar oleh makhluk tertentu seperti kelelawar dan ikan paus. Kelelawar menggunakan gelombang. ultrasonic. untuk. berburu. di. malam. hari. sementara. paus. menggunakanya untuk berenang di kedalaman laut yang gelap.. Gambar 2.3 Sensor Ultrasonic HC-SR04. Bagian-bagian dari Sensor Ultrasonic 1.. Pemancar Ultrasonik (Transmitter) Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal. sinusoida berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonic.. Gambar 2.4 Rangkaian Pemancar Gelombang Ultrasonik.
(24) 12. Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut : 1). Sinyal 40 kHz dibangkitkan melalui mikrokontroler.. 2). Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor.. 3). Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.. 4). Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati dioda D1 (D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektotr T1 akan besar sesuai dari penguatan dari transistor.. 5). Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati dioda D2 (D2 on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari penguatan dari transistor.. 6). Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V. Sehingga pemancar ultrasonik akan menerima tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d -2,5 V).. 2. Penerima Ultrasonik (Receiver) Penerima Ultrasonik ini akan menerima sinyal ultrasonik. yang. dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan. jarak. yang. lebih. jauh adalahlow. (logika’0’). Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler)..
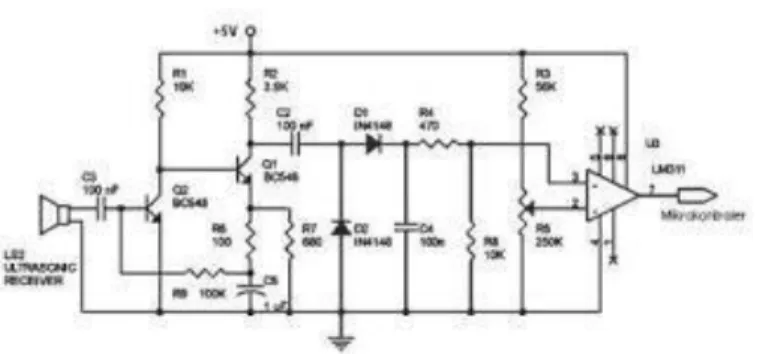
(25) 13. Gambar 2.5 Rangkaian Penerima Gelombang Ultrasonik. Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut: 1). Pertama – tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.. 2). Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHz oleh rangkaian transistor Q1.. 3). Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan oleh rangkaian dioda D1 dan D2.. 4). Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi < 40kHz melalui rangkaian filter C4 dan R4.. 5). Setelah itu sinyal aka n melalui komparator Op-Amp pada U3. Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada. komparator akan mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.. 2.4 DF Player Mini DFPlayer Mini adalah modul MP3 kompak dan dapat langsung dihubungkan ke speaker. Modul dengan baterai power supply, speaker, keypad dapat digunakan sendiri , juga dapat dikontrol melalui port serial , modul Arduino Uno Untuk atau mikrokontroler seri. Modul itu sendiri sempurna terintegrasi hardware decode MP3, WAV, WMA. Sementara driver kartu TF dukungan perangkat lunak mendukung FAT16 , sistem file FAT32. Dapat dilakukan dengan perintah serial sederhana Mainkan musik, serta cara bermain musik dan fungsi lainnya , tanpa operasi yang mendasari rumit , mudah digunakan , stabil dan dapat.
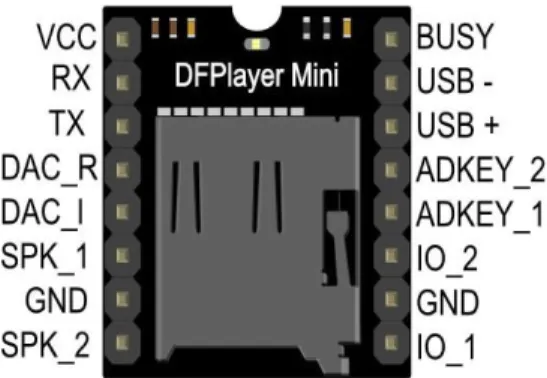
(26) 14. diandalkan . 1.. Mendukung penuh FAT16 , sistem file FAT32 , kartu TF dukungan 32g maksimal , dukungan U disk 32G ini , 64M byte NORFLASH. 2.. Berbagai mode kontrol yang tersedia. Mode kontrol IO , modus serial, modus tombol AD kontrol. 3.. Tempat bahasa siaran fitur , Anda dapat menghentikan sebentar musik latar belakang yang dimainkan . Iklan telah selesai bermain kembali suara latar belakang terus bermain. 4.. Data audio diurutkan berdasarkan folder , mendukung hingga 100 folder , setiap folder dapat diberikan ke 255 lagu. 5.. 30 volume disesuaikan , enam EQ disesuaikan. Aplikasi : 1.. Siaran suara navigasi mobil. 2.. Inspektur transportasi jalan , stasiun tol konfirmasi suara. 3.. Stasiun kereta api , terminal bus pemeriksaan keamanan konfirmasi suara. 4.. Listrik, komunikasi , ruang bisnis keuangan konfirmasi suara listrik. 5.. Kendaraan masuk dan keluar dari saluran untuk memverifikasi konfirmasi suara. 6.. Channel perbatasan konfirmasi suara. 7.. Alarm suara multi-channel atau peralatan panduan operasi suara. 8.. Mobil listrik tamasya pemberitahuan suara aman mengemudi. 9.. Peralatan listrik kegagalan alarm. 10. Suara alarm kebakaran 11. Peralatan siaran otomatis , siaran reguler .. Gambar 2.6 DFPlayer Mini.
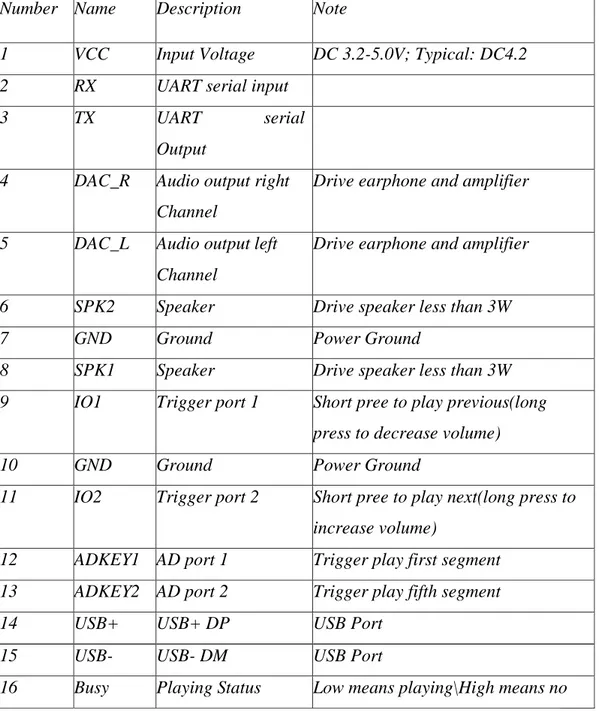
(27) 15. Tabel 2.2 Keterangan Port DFPlayer mini Number Name. Description. Note. 1. VCC. Input Voltage. DC 3.2-5.0V; Typical: DC4.2. 2. RX. UART serial input. 3. TX. UART. serial. Output 4. DAC_R. Audio output right. Drive earphone and amplifier. Channel 5. DAC_L. Audio output left. Drive earphone and amplifier. Channel 6. SPK2. Speaker. Drive speaker less than 3W. 7. GND. Ground. Power Ground. 8. SPK1. Speaker. Drive speaker less than 3W. 9. IO1. Trigger port 1. Short pree to play previous(long press to decrease volume). 10. GND. Ground. Power Ground. 11. IO2. Trigger port 2. Short pree to play next(long press to increase volume). 2.5. 12. ADKEY1 AD port 1. Trigger play first segment. 13. ADKEY2 AD port 2. Trigger play fifth segment. 14. USB+. USB+ DP. USB Port. 15. USB-. USB- DM. USB Port. 16. Busy. Playing Status. Low means playing\High means no. Speaker Speaker adalah komponen elektronika yang terdiri dari kumparan,. membran dan magnet sebagai bagian yang saling terkait. Tanpa adanya membran, sebuah speaker tidak akan mengeluarkan suara, demikian sebaliknya. Bagianbagian speaker tersebut saling terkait dan saling melengkapi satu sama lain. Fungsi speaker ini adalah mengubah gelombang listrik menjadi getaran suara. Proses pengubahan gelombang listrik / elektromagnet menjadi gelombang suara terjadi karena adanya aliran listrik arus AC audio dari penguat audio kedalam.
(28) 16. kumparan yang menghasilkan gaya magnet sehingga akan menggerakkan membran, Kuat lemahnya arus listrik yang diterima, akan mempengaruhi getaran pada membran, bergetarnya membran ini menghasilkan gelombang bunyi yang dapat kita dengar. jenis speaker berdasarkan suara yang dihasilkannya : 1.. Woofer adalah jenis speaker yang menghasilkan output suara nada rendah. 2.. Midrange adalah jenis speaker yang menghasilkan output suara nada Menengah. 3.. Twitter adalah jenis speaker yang menghasilkan output suara nada tinggi.. Jenis speaker berdasarkan desain/bentuk : 1.. Speaker Dual Cone Desain speaker terdiri dari 2 buah cone (konus). 2.. Speaker Coaxcial (Terpusat) Desain Speaker terdiri dari woofer, midrange dan tweeter dalam satu poros dan berdekatan. Peranti ini sengaja di desain menghasilkan frekuensi lebih rata. ( contoh speaker : 2 Way, Speaker 3 Way, Speaker 4 Way).. 3. Speaker Split (Terpisah) Jenis speaker ini adalah jenis terpisah. Woofer, Midrange dan tweeter terpisah. Speker ini dilengkapi dengan crossover yang tujuannya untuk membagi frekuensi suara (nada frekwensi rendah. menengah dan tinggi) :. 2.6 Baterai Baterai adalah sebuah alat yang dapat menyimpan energi listrik dalam bentuk energi kimia. Baterai termasuk ke dalam jenis sel sekunder, artinya sel ini dapat dimuati ulang ketika muatannya habis, hal ini karena reaksi kimia dalam sel dapat dibalikkan arahnya. Pada saat sel dimuati energi listrik diubah menjadi energi kimia dan sel bekerja kemudian energi kimia diubah menjadi energi listrik. Saat ini terdapat 3 jenis baterai yakni baterai basah, baterai hybrid, baterai MF & baterai kering. Baterai basahbanyak di gunakan oleh mobil dan motor. Selain harganya juga relatif murah di banding jenis yang lain, baterai basah lebih lama pemakaiannya dari pada baterai kering untuk menerima beban listrik berubah (motor starter) danbeban konstan (lampu). Baterai basah yang beroperasi sepanjang waktu akan timbul sulfat kristal.
(29) 17. selama pengaliran. Dryout dan sulfation (bentuk berlebih dari timbal sulfat pada plat) adalah dua penyebab utama kegagalan baterai dalam penyimpanan sistem tenaga.. Pembentukan sulfat bisa berakibat oleh perawatan yang salah, antara faktor-faktor lain ini menyebabkan perkembangan tahanan dalam baterai dan juga merintangi reaksi dalam baterai. Perlu ada solusi dalam perawatan dan pengujian baterai untuk memperpanjang umur (life time) baterai. Pemeriksaan baterai dengan beban dilakukan Battery load tester. Pemeriksaan dilakukan dengan cara memberi beban baterai sebesar 125 A selama 10 detik. Pada saat dilakukan tes beban aki harus lebih dari 9,6 V berarti baterai masih baik, bila tegangan baterai 6,5V – 9,6 V baterai perlu diisi kembali, bila tegangan kurang dari 6,5 V ganti baterai. Kerusakan pada lead acid battery salah satunya disebabkan timbulnya kerak PbSO4 pada permukaan elemen seiring penggunaan. Dimana kerak ini akan mempengaruhi kinerja baterai sehingga menyebabkan temperatur baterai tinggi, pengurangan elektrolit berlebih, dan sebagainya.umur accu basah biasanya umur pakainya sekitar dua tahun dan banyak juga yang 1,5 tahun sudah rusak. Tapi ada juga yang bertahan sampai tiga tahun, meskipun jarang terjadi. Baterai yang bisa sampai tiga tahun biasanya menggunakan vitamin. Baterai bekerja berdasarkan reaksi kimia yaitu reaksi redoks yangterjadi baik selama pengisian maupun selama pengosongan. Selama pengisian terjadi pengubahan energi listrik ke energi kimia, dan sebaliknya pada saat pengosongan terjadi pengubahan energi kimia menjadi energi listrik.Ketika pengisian pada sumber energi listrik terjadi aliran listrik yaitu elektron mengalir dari katoda ke anoda. Dengan adanya aliran listrik tersebut, maka akan menimbulkan reaksi kimia (reaksi redoks) yang mengakibatkan + terbebasnya zat-zat dalam baterai yaitu PbSO4 menjadi Pb, PO2, ion H , dan ion. SO42−. Pada pengosongan, terjadi pengaliran listrik yaitu elektron mengalir dari PbO2 atau kutub positif (sebagai anoda) ke P batau kutub negatif (sebagai katoda) sehingga adanya aliran tersebut mengakibatkan terjadinya reaksi kimia.. 2.7 SD Card SD Card adalah kartu memori non-volatile yang dikembangkan oleh SD Card Association yang digunakan dalam perangkat portable. Saat ini, teknologi.
(30) 18. microSD sudah digunakan oleh lebih dari 400 merek produk serta dianggap sebagai standar industri de-facto. Keluarga microSD yang lain terbagi menjadi SDSC yang kapasitas maksimum resminya sekitar 2GB, meskipun beberapa ada yang sampai 4GB. SDHC (High Capacity) memiliki kapasitas dari 4GB sampai 32GB. Dan SDXC (Extended Capacity) kapasitasnya di atas 32GB hingga maksimum 2TB. Keberagaman kapasitas seringkali membuat kebingungan karena masing-masing protokol komunikasi sedikit berbeda. Dari sudut pandang perangkat, semua kartu ini termasuk kedalam keluarga SD. SD adapter memungkinkan konversi fisik kartu SD yang lebih kecil untuk bekerja di slot fisik yang lebih besar dan pada dasarnya ini adalah alat pasif yang menghubungkan pin dari microSD yang kecil ke pin adaptor microSD yang lebih besar. SD mempunyai bentuk fisik yang sama maka sering menyebabkan kebingungan di kalangan konsumen. Contohnya, MicroSD, MicroSDHC, dan MicroSDXC ukuran fisiknya sama tetapi kapabilitasnya berbeda. Protokol komunikasi untuk SDHC/SDXC/SDIO sedikit berbeda dengan MicroSD yang sudah mapan karena biasanyahost device keluaran lama tidak bisa mengenali kartu keluaran baru. kebanyakan masalah mengenai inkompatibilitas ini dapat diselesaikan dengan firmware update.. 2.8 Dioda Dioda merupakan komponen elektronika non-linier yang sederhana. Struktur dasar dioda berupa bahan semikonduktor type P yang disambung dengan bahan type N. Pada ujung bahan type P dijadikan terminal Anoda (A) dan ujung lainnya katoda (K), sehingga dua ter- minal inilah yang menyiratkan nama dioda. Operasi dioda ditentukan oleh polaritas relatif kaki Anoda terhadap kaki Katoda. Dioda semikonduktor dibentuk dengan menyambungkan dua buah bahan semikonduk- tor tipe P dan tipe N. Bahan semikonduktor tipe P mempunyai pembawa muatan mayoritas hole, sedangkan pada tipe N pembawa muatan mayoritasnya adalah elektron. Dengan demi- kian pada persambungan dua bahan tersebut timbul daerah pengosongan. Apabila dioda semikonduktor diberi bias maju, maka arus akan mengalir. Namun apabila dioda diberi bias mundur, maka dioda tidak mengalirkan arus, hanya terdapat arus yang sangat kecil yang disebut dengan arus bocor..
(31) 19. 2.9 Resistor Tahanan listrik yang ada pada sebuah penghantar dilambangkan dengan huruf R , tahanan merupakan komponen yang didesain untuk memiliki besar tahanan tertentu. fungsi resistor yang sesuai namanya bersifat resistif dan termasuk salah satu komponen elektronika dalam kategori komponen pasif. Satuan atau nilai resistansi suatu resistor di sebut Ohm dan dilambangkan dengan simbol Omega (Ω). Sesuai hukum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Selain nilai resistansinya (Ohm) resistor juga memiliki nilai yang lain seperti nilai toleransi dan kapasitas daya yang mampu dilewatkannya. Semua nilai yang berkaitan dengan resistor tersebut penting untuk diketahui dalam perancangan suatu rangkaian elektronika oleh karena itu pabrikan resistor selalu mencantumkan dalam kemasan resistor tersebut. Nilai kapasitas daya resistor ini dapat dikenali dari ukuran fisik resistor dan tulisan kapasitas daya dalam satuan Watt untuk resistor dengan kemasan fisik besar. Menentukan kapasitas daya resistor ini penting dilakukan untuk menghindari resistor rusak karena terjadi kelebihan daya yang mengalir sehingga resistor terbakar dan sebagai bentuk efisiensi biaya dan tempat dalam pembuatan rangkaian elektronika. Toleransi resistor merupakan perubahan nilai resistansi dari nilai yang tercantum pada badan resistor yang masih diperbolehkan dan dinyatakan resistor dalam kondisi baik. Toleransi resistor merupakan salah satu perubahan karakteristik resistor yang terjadi akibat operasional resistor tersebut. Nilai torleransi resistor ini ada beberapa macam yaitu resistor dengan toleransi kerusakan 1% (resistor 1%), resistor dengan toleransi kesalahan 2% (resistor2%), resistor dengan toleransi kesalahan 5% (resistor 5%) dan resistor dengan toleransi 10% (resistor 10%).. 2.10 Kapasitor Kapasitor. (Capacitor). atau. disebut. juga. dengan. Kondensator. (Condensator) adalah Komponen Elektronika Pasif yang dapat menyimpan muatan listrik dalam waktu semzentara dengan satuan kapasitansinya adalah Farad. Kapasitor yang digunakan dalam peralatan Elektronika merupakan satuan.
(32) 20. Farad yang dikecilkan menjadi : Piko Farad (pF) = 1 x 10-2 F Nano Farad (nF) = 1 x 10-9 F Micro Farad (μF) = 1 x 10-6 F konversi Satuan Farad adalah sebagai berikut : 1 Farad = 1.000.000 µF (mikro Farad) 1µF = 1.000 nF (nano Farad) 1µF = 1.000.000 pF (piko Farad) 1nF = 1.000 pF (piko Farad) Kapasitor sendiri merupakan Komponen Elektronika yang terdiri dari 2 (dua) pelat konduktor yang umumnya terbuat dari logam & sebuah Isolator yang diantaranya sebagai pemisah. Dan dalam Rangkaian Elektronika, Kapasitor sendiri disingkat dengan huruf “C”.. Fungsi dari Kapasitor yaitu sebagai berikut : 1.. Sebagai Penyimpan sebuah arus atau tegangan listrik. 2.. Sebagai konduktor yang bisa melewatkan arus AC (Alternating Curren). 3.. Sebagai isolator yang bisa menghambat arus DC (irect Current). 4.. Ssebagai filter (penyaring) dalam rangkaian power suplay (Catu Daya). 5.. Sebagai pembangkit frekuensi dalam rangkaian osilator. 6.. Sebagai penggeser fasa. 7.. Sebagai pemilih gelombang frekuensi (Kapasitor Variabel yang digabungkan dengan Spul Antena dan Osilator). 8.. Sebagai kopling.
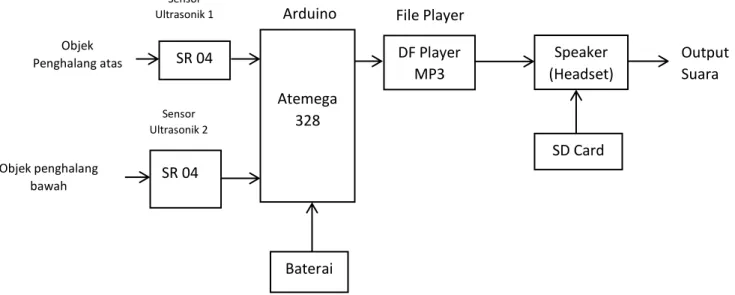
(33) BAB III METODE PENELITIAN. 3.1 Diagram Blok Berikut adalah gambar blok diagram sistem yang merupakan rancangan dasar sistem.. Sensor Ultrasonik 1. Objek Penghalang atas. Arduino. File Player DF Player MP3. SR 04 Sensor Ultrasonik 2. Speaker (Headset). Atemega 328 SD Card. Objek penghalang bawah. SR 04. Baterai. Gambar 3.1 Diagram Blok. Cara kerja diagram blok: Blok diagram sistem memperlihatkan konfigurasi sistem dari input hingga output. input. berasal dari sensor yang mendeteksi jarak objek yaitu sensor ultrasonik.. Terdapat dua sensor ultrasonic Yang digunakan pada alat. Kedua sensor memberikan data pada mikrokontroler untuk diolah yaitu dikalibrasi menjadi nilai sebenarnya. Kedua data tersebut kemudian dibandingkan dengan suatu acuan dan digunakan untuk memberikan output. Output sistem dalam hal ini adalah berupa ucapan suara yang memberikan peringatan. misalnya jika terdeteksi objek. penghalang dalam jarak 2 meter maka kontroler akan mengeluarkan suara peringatan seperti “ ada objek penghalang didepan” dan sebagainya. Kedua sensor dapat membedakan tips penghalang Yang dihadapi. Misalnya jika hanya sensor Yang bawah mendeteksi penghalang Berbeda dengan jika hanya atas Dan 21. Output Suara.
(34) 22. juga beda jika keduanya. Sensor bawah Misalnya hanya penghalang trotoar, pagar rendah atau Batu , sensor atas mendeteksi kenderaan atau Mobil ,sedangkan jika Kedua sensor terhalang kemungkinan penghalang tersebut adalah beton atau tembok rumah. Output sistem berupa sebuah player digital yaitu modul mp3 yang memainkan file suara yang sebelumnya direkam pada memori sd card.. Fungsi masing-masing blok : . Sensor Ultrasonik SR 04, merupakan sensor yang berfungsi mengukur jarak objek didepan sensor.. . Arduino Atmega 328, merupakan sebagai pengolah atau pemproses data.. . Baterai, merupakan komponen vital agar sistem dapat bekerja, dengan memberikan energi berupa arus listrik.. . Player file digital/mp3, merupakan sebuah player/pemain file suara digital yang bekerja berdasarkan perintah.. . Speaker, merupakan sebuah perangkat keras yang merubah sinyal listrik menjadi frekuensi suara.. . SD Card, merupakan sebagai tempat penyimpanan audio..
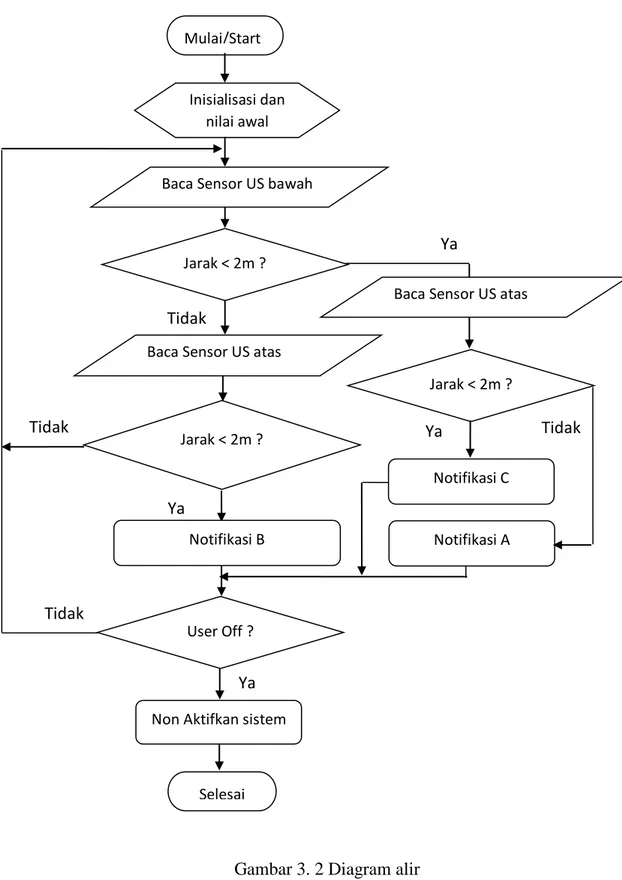
(35) 23. 3.2 FLOWCHART. Mulai/Start. Inisialisasi dan nilai awal. Baca Sensor US bawah. Ya Jarak < 2m ? Baca Sensor US atas. Tidak Baca Sensor US atas Jarak < 2m ?. Tidak. Jarak < 2m ?. Ya Notifikasi C. Ya Notifikasi B. Tidak User Off ?. Ya Non Aktifkan sistem. Selesai. Gambar 3. 2 Diagram alir. Notifikasi A. Tidak.
(36) 24. Cara kerja diagram alir: Flowchart pada gambar 3.2 menjelaskan aliran proses kerja sistem mulai dari awal hingga selesai. Dimulai dengan pengaturan parameter input dan output yaitu inisialisasi dan pemberian nilai awal untuk semua parameter tersebut. Selanjutnya pembacaan input, yaitu sensor ultrasonik 1 dan 2. Penggunaan 2 buah sensor bertujuan untuk membedakan objek besar atau objek kecil yang ada didepan sensor. Jika hanya salah satu sensor yang mendeteksi objek berarti objek penghalang memiliki ukuran kecil, namun jika kedua sensor mendeteksi objek dalam jarak tertentu secara bersamaan maka objek tersebut merupakan objek besar. Contohnya adalah misalnya benda-benda kecil seperti trotoar, batu dan sebagainya yang dapat dilangkahi. Sedangkan objek besar seperti tembok, mobil dan lain-lain yang mengharuskan pengguna harus berbelok arah. Output hasil deteksi sensor akan diucapkan berupa suara manusia melalui speaker . Alat akan terus bekerja selama catu daya dalam keadaan aktif..
(37) BAB IV HASIL DAN PEMBAHASAN 4.1. Hasil penelitian Hasil penelitian ini adalah sebuah alat bantu jalan untuk tuna netra berupa. tongkat yang dilengkapi dengan 2 sensor ultrasonik dan sebuah speaker. Fungsi sensor adalah untuk mengukur jarak penghalang yang ada didepan dan tujuan penggunaan 2 sensor ultrasonik adalah agar dapat membedakan ukuran objek penghalang tersebut apakah rendah atau tinggi. Cara kerja alat mulai dari sensor mendeteksi jarak objek pemantul didepannya jika ada. Jarak diatas 2 meter diabaik an oleh sensor.. Gambar 4.1 Hasil rancangan tongkat pemandu jalan tuna netra.. Jika sensor mendeteksi objek dibawah 2 meter maka mikrokontroler akan membandingkan nilai kedua sensor. Bila hanya sensor bawah yang bernilai dibawah 2 meter maka mikrokontroler akan mengenalnya sebagai penghalang rendah seperti trotoar ,pagar rendah dan sebagainya. Sedangkan jika hanya sensor atas yang bernilai dibawah 2 meter objek tersebut diasumsikan atau dikenal sebagai objek mobil atau sejenisnya. Jika kedua sensor memberi nilai dibawah 2. 25.
(38) 26. meter maka objek dikenal sebagai penghalang sejenis tembok tinggi dan sejenisnya. Dari perbedaan data tersebut kontroler akan memilih ouput yang akan diucapkan berupa suara yaitu jenis objek penghalang yang mungkin yang ada didepannya. Rancang bangun alat terdiri dari beberapa komponen seperti sensor ultrasonik yang berfungsi mendeteksi jarak objek, mikrokontroler Arduino yang bekerja sebagai pengendali utama dan modul DFPlayer yang berfungsi mengubah file suara menjadi gelombang bunyi berupa ucapan suara manusia. Alhasil, alat berhasil dirancang dan dibuat atau direalisasikan. Untuk mengetahui unjuk kerja alat maka dibutuhkan serangkaian pengujian terhadap alat tersebut dan pengujian masing-masing komponen yang digunakan. Bab ini akan membahas metode pengujian dan hasilnya berupa data pelengkap . Realisasi rancangan alat diperlihatkan pada gambar 4.1.. 4.2 Pengujian Sistem Pengujian sistem dan pengujian komponen-komponen bertujuan untuk mengetahui fungsi dan unjuk kerja tiap komponen apakah sesuai dengan kriteria yang dibutuhkan atau tidak. Apakah sistem bekerja sesuai dengan yang diinginkan atau tidak dan untuk memperoleh data spesifik dari. alat yang dirancang.. Pengujian dimulai dari pengujian komponen-komponen utama.. 4.2.1 Pengujian Sensor Ultrasonik Tujuan pengujian sensor ultrasonik adalah untuk mengetahui apakah rangkaian Sensor Ultrasonik HC-SR04 yang digunakan dapat bekerja sesuai yang diinginkan atau tidak. Peralatan yang dibutuhkan untuk melakukan pengujian ini adalah : 1. Board Arduino Uno 2. Kabel data 3. Rangkaian Sensor Ultrasonik HC-SR04 4. Komputer atau laptop 5. Alat ukur cm. Prosedur pengujian rangkaian sensor ultrasonik : 1. Buat program untuk pengujian tersebut pada software Arduino IDE..
(39) 27. 2. Selanjutnya kompile dan unggah program tersebut pada board Arduino. 3. Hubungkan sensor ultrasonik pada board Arduino. 4. Jalankan rangkaian setelah program diupload . 5. Berikan objek penghalang didepan sensor mulai dari 10 cm hingga 220 cm. 6. Ukur jarak objek dengan alat ukur cm. 7. Catat data hasil pengukuran cm dan pengukuran sensor pada tabel.. Program : Pada pengujian ini rangkaian sensor ultrasonik terhubung pada Arduino Uno, dengan demikian hasil pembacaan sensor akan tampil pada display komputer melalui aplikasi serial monitor sebagai output. Berikut adalah listing program yang dibuat untuk pengujian sensor ultrasonik. void Baca_ultrasonic1() { digitalWrite(Trigger1, HIGH); delayMicroseconds(20); digitalWrite(Trigger1, LOW); while (echo1 == 0){} int duration = pulseIn(echo1, HIGH); cm1 = duration/29/2; } Nilai 9600 pada Serial.begin(9600); merupakan kecepatan komunikasi data yang digunakan antara Arduino dengan komputer. Pengaturan awal sensor ultrasonik ada pada bagian pin trigger yaitu sebagai output dan pin echo sebagai input.. Program untuk membaca sensor HC-SR04 ditunjukkan pada listing program berikut.. void Baca_ultrasonic2() { digitalWrite(Trigger2, HIGH); delayMicroseconds(20); digitalWrite(Trigger2, LOW);.
(40) 28. while (echo2 == 0){} int duration = pulseIn(echo2, HIGH); cm2 = duration/29/2; }. void loop(void) {. Baca_ultrasonic1(); Baca_ultrasonic2();. Serial.print(cm1); Serial.print(". ");. Serial.println(cm2); delay(1000); } Rutin diatas adalah rutin untuk membaca sensor, yaitu memberikan trigger pada ultrasonik .Setelah itu program akan menunggu pulsa dari pin echo berlogika 1 . Saat itu counter akan mulai menghitung sampai pin echo berlogika 0 kembali. Hasil hitungan counter tersebutlah yang dikalibrasi ke jarak. Setelah dijalankan hasil pembacaan sensor dapat dilihat pada monitor komputer seperti gambar berikut ini:. Gambar 4.2 Tampilan hasil pengukuran sensor ultrasonik 1 dan 2..
(41) 29. Berikut adalah tabel hasil pengujian sensor ultrasonik dan dibandingkan dengan pengukuran manual dengan alat ukur konvensional (cm).. Tabel 4.1 Hasil Pengujian Sensor Ultrasonik 1 Pengukuran. Ultrasonik. manual (cm). (cm) 1. 10. 10. 2. 20. 20. 3. 31. 30. 4. 40. 40. 5. 50. 50. 6. 61. 60. 7. 72. 70. 8. 80. 80. 9. 91. 90. 10. 101. 100. 11. 112. 110. 12. 123. 120. 13. 131. 130. 14. 140. 140. 15. 151. 150. 16. 161. 160. 17. 170. 170. 18. 181. 180. 19. 189. 190. 20. 199. 200. 21. 209. 210. Tabel 4.2 Hasil Pengujian Sensor Ultrasonik 2 Pengukuran. Ultrasonik. manual (cm). (cm) 1. 10. 10. 2. 20. 20.
(42) 30. 3. 30. 30. 4. 41. 40. 5. 51. 50. 6. 60. 60. 7. 71. 70. 8. 79. 80. 9. 91. 90. 10. 99. 100. 11. 111. 110. 12. 121. 120. 13. 130. 130. 14. 141. 140. 15. 150. 150. 16. 160. 160. 17. 169. 170. 18. 182. 180. 19. 191. 190. 20. 201. 200. 21. 211. 210. Analisa : Setelah program berhasil diunggah pada board Arduino dan dijalankan maka hasil yang diperoleh adalah jarak yang terdeteksi oleh sensor ultrasonik akan ditampilkan pada serial monitor. Dimana jarak yang dimaksud adalah onjek pemantul dari 0 cm sampai 210 cm . Tampak selisih pengukuran antara sensor ultrasonik deengan pengukuran manual . Dari hasil diatas dapat disimpulkan bahwa sensor ultrasonik telah bekerja dengan baik.. 4.2.2 Pengujian modul DFPlayer DfPlayer adalah modul suara yang harus diuji dengan bantuan program karena modul tersebut dikontrol secara digital melalui perintah serial digital. Untuk itu program dibuat untuk pengujian tersebut dan dijalankan berbarengan dengan Arduino . Program dibuat untuk memainkan file suara yang ada pada memori SDcard dimana SDCard telah direkam beberapa file suara..
(43) 31. Peralatan untuk melakukan pengujian ini adalah : 1. Board Arduino Uno 2. Modul DFPlayer 3. SDcard 4. Loudspeaker. Prosedur pengujian rangkaian sensor ultrasonik : 1. Buat program untuk pengujian tersebut pada software Arduino IDE. 2. Selanjutnya kompile dan unggah program tersebut pada board Arduino. 3. Hubungkan modul DFPlayer pada board Arduino. 4. Jalankan rangkaian setelah program diupload .. Program : #include <Wire.h> #include <Adafruit_Sensor.h> #include "DFRobotDFPlayerMini.h" #include <SoftwareSerial.h>. DFRobotDFPlayerMini myDFPlayer; SoftwareSerial myMP3Serial(A0, A1); // RX, TX. void setup(void) { myMP3Serial.begin(9600); if (!myDFPlayer.begin(myMP3Serial)) {} myDFPlayer.setTimeOut(1500); myDFPlayer.outputDevice(DFPLAYER_DEVICE_SD); myDFPlayer.play(1); delay(3000); }. Hasil :.
(44) 32. Setelah dijalankan pada kontroler maka DFPlayer akan mengeluarkan suara yang direkam pada sdcard dengan nomor urut 1 sesuai dengan perintah myDFPlayer.play(1) yaitu urutan 1. Setelah itu program diubah menjadi urutan 2 dan seterusnya. Hasil menunjukkan program tersebut akan memainkan file sesuai urutan nomor yang diprogramkan. Berikut adalah tabel hasil pengujian yang dibuat.. Tabel 4.3 Hasil pengujian modul DFPlayer. Perintah program. Output suara. myDFPlayer.play(1);. Kemungkinan ada pagar. myDFPlayer.play(2);. Kemungkinan ada mobil. myDFPlayer.play(3);. Kemungkinan ada tembok. 4.2.3 Pengujian Mikrokontroler Arduino Uno Untuk mengetahui unjuk kerja rangkaian kontroler Arduino maka modul tersebut dapat diuji dengan memprogramnya agar mengeluarkan logika pada tiap port nya dan melakukan perbandingan antara program yang dibuat dgn hasil pengukuran. Algoritma program yang dibuat untuk pengujian ini adalah sebagai berikut: Void setup() { Pinmode(0,Output);digitalWrite(0,HIGH); Pinmode(1,Output);digitalWrite(1, HIGH); Pinmode(2,Output);digitalWrite(2,HIGH); Pinmode(3,Output);digitalWrite(3, HIGH); Pinmode(4,Output);digitalWrite(4, HIGH); Pinmode(5,Output);digitalWrite(5, LOW); Pinmode(6,Output);digitalWrite(6, LOW); Pinmode(7,Output);digitalWrite(7, LOW); Pinmode(8,Output);digitalWrite(8, LOW); Pinmode(9,Output);digitalWrite(9, LOW); Pinmode(10,Output);digitalWrite(10, HIGH); Pinmode(11,Output);digitalWrite(11, HIGH); Pinmode(12,Output);digitalWrite(12,HIGH); }.
(45) 33. Pinmode adalah perintah untuk inisialisasi pin sebagai output atau input sedangkan digitalwrite adalah pemberian nilai logika high atau low pada pin tersebut. Setelah program dibuat dan diunggah pada board arduino kemudian dijalankan, maka hasil pengukuran tegangan tiap pin adalah sebagai berikut:. Tabel 4.4 Hasil pengukuran pin arduino Uno. Pin Vout(V) 0. 5,00. 1. 5,01. 2. 5,05. 3. 5,05. 4. 5,01. 5. 0,02. 6. 0,01. 7. 0,02. 8. 0,01. 9. 0,01. 10. 5,01. 11. 5,00. 12. 5,00. Hasil : setelah di analisa berdasarkan logika keluaran tiap port dan dibandingkan dgn data program maka dapat dilihat ada kesamaan antara program dan output pin. Hasil menunjukkan tidak terdapat perbedaan ,sehingga dapat dinyatakan rangkaian kontroler telah bekerja dgn baik . Analisa : Dari data diatas dapat dibandingkan antara data program dengan data pengukuran dan dapat dilihat adanya kesamaan antara program dan keluaran tiap pin. Hasil menunjukkan tidak terdapat perbedaan ,sehingga dapat dinyatakan rangkaian kontroler telah bekerja dengan baik ..
(46) 34. 4.2.4 Pengujian catu daya sistem Catudaya yang digunakan adalah batere 9V. Pengujian dilakukan dgn mengukur tegangan keluaran catu daya saat berbeban dan tanpa beban . Terdapat 2 testpoint output yaitu output setelah penyearah dan output setelah regulator 7805. Berikut adalah data hasil pengukuran catu daya : Peralatan yang dibutuhkan untuk melakukan pengujian ini adalah : 1. Alat ukur voltmeter digital 2. Rangkaian Catu daya 3. IC AN7805 4. Sumber tegangan 12V. Prosedur pengujian : 1. Aktifkan rangkaian catudaya 2. Ukur tegangan output yaitu output catu daya dan output regulator Berikan beban berupa lampu kecil dan ukur kembali kedua titik diatas. Tabel 4.5 Hasil pengukuran catu daya dan regulator Kondisi output. Output dc. Output regulator. Tanpa beban. 9,6 V. 5,03 V. Dgn beban. 9,03 V. 5,01 V. Pembahasan: Dari pengukuran diatas dapat diambil kesimpulan bahwa tegangan yang dihasilkan telah memenuhi kebutuhan rangkaian yang dibuat yaitu 9V dan 5V. Dengan demikian pengujian ini dinyatakan berhasil.. 4.2.5 Pengujian Sistem Secara Keseluruhan Pengujian. ini. dilakukan. setelah. semua. komponen. terhuhung. pada. mikrokontroler Arduino Uno termasuk program keseluruhan telah diunggah pada modul tersebut. Pengujian bertujuan untuk menguji unjuk kerja sistem yang dibuat yaitu alat pemandu jalan bagi tuna netra. Pengujian ini dilakukan dengan membawa tongkat tersebut sambil berjalan dengan mata tertutup. Tongkat diarahkan kedepan dan posisi tongkat hampir tegak lurus. Berikan beberapa objek.
(47) 35. penghalang seperti dinding , penghalang rendah sebatas lutut dan mobil. Coba kan sensor untuk mendekati penghalang tersebut dan amati output alat melalui sistem speaker atau ucapan yang diberikan. Hasil pengujian ditunjukkan pada tabel berikut ini.. Tabel 4.6 Hasil pengujian keseluruhan. Kondisi jarak objek. Kondisi jarak objek. Output suara pada speaker. sensor 1 (cm). sensor 2 (cm). >200. >200. Tidak ada output. <200. >200. Kemungkinan ada pagar. >200. <200. Kemungkinan ada mobil. <200. <200. Kemungkinan ada tembok. Dari tabel diatas dapat dilihat respon sistem yang mampu mendeteksi jarak dengan baik dan memberikan notifikasi via speaker. Dengan demikian sistem dinyatakan. bekerja sesuai dengan tujuan yang diinginkan yaitu membantu. navigasi seorang penyandang tuna netra..
(48) BAB V KESIMPULAN DAN SARAN. 5.1 Kesimpulan 1. Sistem pemandu jalan bagi penyandang tuna netra dapat dibuat dengan bantuan sensor ultrasonik dan mikrokontroler Arduino Uno dan telah bekerja sesuai tujuan yang diinginkan.Rangkaian dapat dirakit pada sebuah tongkat dengan penempatan sensor atas dan sensor bawah sehingga dapat membedakan jenis objek penghalang didepan. 2. Sensor ultrasonik SR04 dapat mendeteksi jarak secara efektif dengan sudut kurang dari 30 derajat terhadap objek. 3. Jarak maksimal yang dapat dideteksi oleh sensor ultrasonik SR04 secara efektif adalah 210 cm. 4. Pemrograman untuk aplikasi Pemandu jalan dapat dibuat dengan bahasa pemrograman C dan dengan bantuan Arduino IDE versi 1.8.9 program berhasil dikompile dan diunggah pada modul Arduino Uno.. 5.2 Saran 1. Dibutuhkan penelitian dan pengembangan agar sistem dapat bekerja lebih optimal. 2. Penambahan sensor agar diperoleh navigasi yang memiliki akurasi lebih tinggi.. 36.
(49) 37. DAFTAR PUSTAKA. Agustin, Nurul Wulan. 2019. Rancang Bangun Sistem Pemantauan Infus Menggunakan Handphone Berbasis Arduino Uno. Medan: Universitas Sumatera Utara. Amirudin, Erwan. Pengaruh Penambahan Vitamin Baterai Vitta-Q Terhadap Load Test pada Load Acid Baterai Tipe Liquid Vented 12V 5Ah. Blocher, Richard. 2004. Dasar Elektronika.Yogyakarta : Penerbit Andi. Daryanto.2008.Pengetahuan Teknik Elektronika.Jakarta:Bumi Aksara. Hurisantri, Widya. 2016. Sistem Pendetaksi Warna dan Nominal Uang Untuk Penyandang Tunanetra Berbasis Arduino Uno. Palembang: Teknik Elektro Politeknik Negeri sriwijaya. Nabila,Cut hanisa.2017. Rancang Bangun Penala Energi Matahari Memanfaatkan Digital Kompas dan RTC Berbasis Mikrokontroler Atmega328. Medan:USU Nainggolan, Andre Tolopan. 2019. Alat Pengukur Ketinggian dan Ketebalan Portable dengan Menggunakan Arduino Nano. Medan: Universitas Sumatera Utara. Malvino, Albert Paul. 2003. Prinsip - prinsip Elektronika. Jilid 1 & 2. Edisi Pertama. Jakarta: Salemba Teknika. Mudmainnah, Rahmita Nurul. 2015. Pemahaman Siswa Tunanetra (Buta Total Sejak Lahir dan Sejak Waktu Tertentu) Terhadap Bangun Datar Segitiga. Jakarta: Pendidikan Matematika Universitas Muhammadiyah Jakarta. Pratamo, Andi. 2005. Panduan Praktis Pemograman AVR Mikrokontroler. Yogyakarta: Penerbit ANDI. Romy Budhi Widodo, 2009. Embedded System Menggunakan Mikrokontroler Dan Pemrograman C, Yogyakarta. Andi. Sitorus, Ebta Wisuda Djaya. 2019. Perancangan dan Pembuatan Kompas Digital Dengan Output Suara Sebagai Alat Bantu Jalan Berbasis Mikrokontroler ATMega328. Medan: Universitas Sumatera Utara. Sugarto Fajar. 1991. Teori Dasar Elektronika. Surabaya: CV Anugerah..
(50) 38. Surjono, Herman Dwi. 2007. Elektronika Teori Dan Penerapan. Yogyakarta: Cerdas Ulet Kreatif. Susanti, Wida Suri. 2018. Perancangan dan Pembuatan Modul Praktikum Elektronika Dasar. Malang: Teknik Elektro Universitas Muhammadiyah Malang. Usman. 2008. Teknik Antarmuka dan Pemrograman mikrokontrole AT89S52. Yogyakarta: Andi Offset Wasito S. 1986. Kumpulan Data PentingKomponenElektronika. Jakarta: PT Multimedia Widodo, Budiharto.2004. Elektronika Digital Dan Mikrokontroller. Yogyakarta: Andi Offset. Zhilal, Fadli. 2014. Media Penyimpanan SD card. Jurnal Ilmiah. http://elektronika-dasar.web.id/lcd-liquid-cristal-display-dot-matrix-2x16-m1632/ Diakses Pada : 06 Juli 2020 Pukul: 17..
(51) 39. LAMPIRAN 1.. Program Keseluruhan #include <Wire.h> #include <Adafruit_Sensor.h> #include "DFRobotDFPlayerMini.h" #include <SoftwareSerial.h> #define Trigger1 9 #define echo1 10 #define Trigger2 11 #define echo2 12 #define LED A2. DFRobotDFPlayerMini myDFPlayer; SoftwareSerial myMP3Serial(A0, A1); // RX, TX. char inByte; unsigned int X,cm1,cm2; long Count;. void setup(void) { Serial.begin(9600); myMP3Serial.begin(9600); pinMode(Trigger1, OUTPUT); pinMode(Trigger2, OUTPUT); pinMode(echo1, INPUT); pinMode(echo2, INPUT); pinMode(LED, OUTPUT); digitalWrite(echo1, HIGH); digitalWrite(echo2, HIGH);.
(52) 40. digitalWrite(Trigger1, LOW); digitalWrite(Trigger2, LOW);. if (!myDFPlayer.begin(myMP3Serial)) {} //Use softwareSerial to communicate with mp3. myDFPlayer.setTimeOut(1500); //Set serial communictaion time out 500ms myDFPlayer.volume(30); //Set volume value (0~30). myDFPlayer.outputDevice(DFPLAYER_DEVICE_SD); delay(3000); } void Baca_ultrasonic1() { digitalWrite(Trigger1, HIGH); delayMicroseconds(20); digitalWrite(Trigger1, LOW); while (echo1 == 0){} int duration = pulseIn(echo1, HIGH); cm1 = duration/29/2; } void Baca_ultrasonic2() { digitalWrite(Trigger2, HIGH); delayMicroseconds(20); digitalWrite(Trigger2, LOW); while (echo2 == 0){} int duration = pulseIn(echo2, HIGH); cm2 = duration/29/2; } void loop(void) {.
(53) 41. Baca_ultrasonic1(); Baca_ultrasonic2(); Serial.print(cm1); Serial.print(" "); Serial.println(cm2);. if (cm1 < 200 && cm2 < 200) {myDFPlayer.play(3);delay(2800);} else if (cm1 < 200) {delay(100);Baca_ultrasonic1();if (cm1 < 200){ myDFPlayer.play(1);delay(2800);}} else if (cm2 < 200) {delay(100);Baca_ultrasonic2();if (cm2 < 200) { myDFPlayer.play(2);delay(2800);}} digitalWrite(LED, HIGH); delay(100); digitalWrite(LED, LOW); delay(500); } Gambar Rangkaian Keseluruhan. U3 7805. SW1 VI. 1 SW-SPST. GND. VO. BAT1. 2. C4. 9V. 10u. SONAR1. SONAR2. ULTRASONIC SENSOR. ULTRASONIC SENSOR TestPin. +5V Trigger Echo Gnd. TestPin. www.TheEngineeringProjects.com. 5V. SIM1. D13 REF. A1 A2 A3 A4 A5 A6 A7. A0 A1 A2 A3 A4 A5 A6 A7 5V RST. D12 D11. Arduino Nano. GND. ARDUINO NANO. D10 D9 D8 D7. ATMEL ATMEGA328P. 13. A0. D6 D5 D4 D3 D2 RX / D0 TX / D1. 12 11 10 9 8 7 6 5 4 3 2. VCC. DFPLAYER MINI. 0 1. RX TX. MP3. GND. www.TheEngineeringProjects.com. +5V Trigger Echo Gnd. 3. www.TheEngineeringProjects.com. 2.. LS1. SPK1 SPK2 SPEAKER.
(54) 42. 3.. Gambar Arduino Nano Dihubungkan Dengan Dfplayer Mini. D13 REF. A0. A0. A1. A1. A2. A2. A3. A3. A4. A4. A5. A5. A6. A6. A7. A7 5V RST. 12. D12. 11. D11. Arduino Nano. 10. D10. 9. D9. 8. D8. 7. D7. 6. D6. ATMEL ATMEGA328P. 13. www.TheEngineeringProjects.com. SIM1. 5. D5. 4. D4. 3. D3. GND. SPK2. MP3. RX. 1. LS1. SPK1. 0. RX / D0 TX / D1. GND. VCC. DFPLAYER MINI. 2. D2. SPEAKER. TX. ARDUINO NANO. Gambar Arduino Nano Dihubungkan Dengan Sensor Ultrasonik. SONAR1. SONAR2. ULTRASONIC SENSOR. ULTRASONIC SENSOR. www.TheEngineeringProjects.com. +5V Trigger Echo Gnd. TestPin. D13 REF. A1 A2 A3 A4 A5 A6 A7. A0 A1 A2 A3 A4 A5 A6 A7 5V RST. D12 D11. Arduino Nano. D10 D9 D8 D7 D6. ATMEL ATMEGA328P. 13. A0. www.TheEngineeringProjects.com. SIM1. D5 D4 D3 D2 RX / D0 TX / D1. GND. 12 11 10 9 8 7 6 5 4 3 2 0 1. ARDUINO NANO. 5. Gambar Arduino Nano. D13 REF. A1 A2 A3 A4 A5 A6 A7. A0 A1 A2 A3 A4 A5 A6 A7 5V RST. D12 D11. Arduino Nano. GND. ARDUINO NANO. D10 D9 D8 D7. ATMEL ATMEGA328P. 13. A0. www.TheEngineeringProjects.com. SIM1. D6 D5 D4 D3 D2 RX / D0 TX / D1. 12 11 10 9 8 7 6 5 4 3 2 0 1. TestPin. 5V. www.TheEngineeringProjects.com. +5V Trigger Echo Gnd. 4..
(55) 43. 6.. Gambar Sensor Ultrasonik SONAR2 ULTRASONIC SENSOR www.TheEngineeringProjects.com. +5V Trigger Echo Gnd. TestPin. Gambar Rangkaian Catu Daya. U3 7805 VO. VI. GND. 3. SW1. C4 10u. 2. 7.. 1 SW-SPST. BAT1 9V.
(56) 44.
(57)
Gambar

+7

Garis besar
Dokumen terkait
Cara kerja sistem pada alat penuntun arah untuk penyandang tuna netra dengan output suara berbasis mikrokontroler ini, yaitu ketika di sekitar penyandang tuna
Menciptakan alat pengukur tinggi badan menggunakan sensor ultrasonik berbasis mikrokontroler ATmega328 dengan menghasilkan output suara yang dirancang dan dibuat untuk
Menciptakan alat pengukur tinggi badan menggunakan sensor ultrasonik berbasis mikrokontroler ATmega328 dengan menghasilkan output suara yang dirancang dan dibuat untuk
Perancangan Alat Pengukur Tinggi Badan Digital Menggunakan Sensor Ultrasonik Berbasis Mikrokontroler
Pada perancangan perangkat keras penulis membuat kerangka pengukur tinggi badan, rangkaian minimum system mikrokontroler AT89C51, rangkaian mikrokontroler dengan sensor
Cara kerja alat gelang ultrasonik adalah dengan cara mengkaitkan alat tersebut di tangan seorang tunanetra, kemudian saklar ditekan dalam keadaan on maka sensor ultrasonik
Kelebihan alat ini adalah, penyandang tunanetra dapat melakukan aktivitas secara mandiri, dengan adanya sensor ultrasonik yang terpasang pada alat bantu ini,
Hasil Rangkaian Sistem Deteksi Banjir Konstruksi rangkaian yang dibangun dengan menggunakan minimum sistem Arduino Uno, sensor ultrasonik disertai dengan buzzer dapat dilihat pada
Diantaranya adalah untuk mengukur tinggi badan, mengukru ketinggian air.Perpaduan antara arduino sebagai mikrokontroler dengan sensor ultrasonik sebagai pendeteksi benda dan pengukur
