Rancang Bangun Filling Water Otomatis Berdasarkan Jenis Gelas Berbasis PLC ( Programmable Logic
Controller ) Outseal
Selvi Ari Sandy1, Ali Kasim2
1Fakultas Teknik, Universitas Bina Darma, Palembang, Indonesia
2,3Program Studi Teknik Elektro, Universitas Bina Darma, Palembang, Indonesia Email: 1[email protected], 2[email protected]
Abstract
The food and beverage industry in general already uses tools or machines that do the filling automatically.
There are many types of drinks that are used in human life, in terms of temperature, taste, and color.
Where to distinguish these, different types of objects are needed. The focus of this research is a tool used to fill automatically with programming technology. Programming technology that uses a logic control system known as Programmable Logic Controller (PLC) Outseal which will be trigger the components of the tool.
The object sensor (Proximity Capasitive) that can detect the presence of objects in accordance with the time specified and the metal sensor (Proactive Inductive) can determine the pump that will work in filling water, and the filling pump can fill the glass to the fullest in accordance with the time that has been calculated Key word: filling, Programmable Logic Controller (PLC) Outseal , Object Sensor (Proximity Capasitive), Metal Sensor ( Proximity Inductive )
Abstrak
Industri makanan dan minuman pada umumnya sudah menggunakan alat atau mesin yang melakukan pengisian secara otomatis. Terdapat banyak macam jenis minuman yang di gunakan dalam kehidupan manusia, dalam hal suhu, rasa, maupun warna. Dimana untuk membedakan hal tersebut dibutuhkan jenis objek yang berbeda juga. Fokus pada penelitian ini adalah alat yang digunakan untuk melakukan filling secara otomatis dengan teknologi pemrograman. Teknologi pemrograman y a n g menggunakan suatu sistem kontrol logika yang dikenal sebagai Programmable Logic Controller (PLC) Outseal yang akan menjadi trigger komponen – komponen alat. Sensor benda (Proximity Capasitive) yang dapat mendeteksi adanya benda sesuai dengan waktu yang telah di tentukan dan sensor logam ( Proximity Inductive ) dapat menentukan pompa yang akan bekerja dalam pengisian air, Serta Pompa pengisian dapat mengisi gelas sampai penuh sesuai dengan waktu yang telah di perhitungkan
Kata kunci: filling, Programmable Logic Controller (PLC) Outseal , Sensor benda (Proximity Capasitive), Sensor logam ( Proximity Inductive )
1. PENDAHULUAN
Filling merupakan suatu proses pengisian suatu cairan kedalam sebuah kemasan atau wadah, salah satu contohnya yaitu botol minuman, gelasm dan lain semacamnya. hal berikut biasanya di lakukan secara manual tetapi dengan adanya suatu alat filling secara otomatisasi, dengan menggunakan sensor benda, sensor logam, Serta PLC ( Programmable Logic Controller ) sebagai sistem kontrol logika.
Maka dari itu, agar bisa menjadi sarana self service dimana alat dapat membedakan sendiri jenis cairan apa yang akan di isi berdasarkan jenis gelas porselin atau logam. Akhirnya penulis memutuskan mengambil judul sekaligus menjadi batasan masalahnya, yaitu RANCANG BANGUN FILLING OTOMATIS BERDASARKAN JENIS GELAS BERBASIS PLC (PROGRAMMABLE LOGIC CONTROLLER ) OUTSEAL.
Menurut jurnal Chaerunnisa, Sandy Bhawana Mulia, S.Pd., M.T. dan Mindit Eriyadi., S.Pd., M.T. menuliskan bahwa permasalahan pada pengisian botol dengan air semakin banyak dialami pada industri, maka dibutuhkan suatu alat bantu untuk mempermudah dan mempercepat pekerjaan dengan hasil yang baik.
Dengan Perkembangan teknologi yang semakin pesat maka terciptanya teknologi pemrograman dengan menggunakan suatu sistem kontrol logika yang dikenal sebagai Programmable Logic Controller (PLC).
Selain itu menurut jurnal penelitian yang dilakukan oleh Fatoni Gea Airlangga, Aris Triwiyanto, dan Sumardi menuliskan bahwa dalam industri kecil, sistem filling botol masih dioperasikan secara manual. Pengoperasian secara manual membuat sistem kurang efisien sehingga membutuhkan alat yang dapat meningkatkan produktifitas pengisian dan pengemasan susu pada botol agar dapat membuat produksi susu lebih efisien. Sehingga merancang otomatisasi dengan mengunakan PLC pada sebuah prototipe filling bottle and capping botol yang dapat melakukan proses automasi pengemasan susu pada botol polyethylene terephthalate (PET) bervolume 100 ml dan melakukan penghitungan jumlah susu yang sudah dikemas dalam botol PET bervolume 100 ml.
2. METODE 2.1. Komponen
1. Catu Daya/ Power Supply
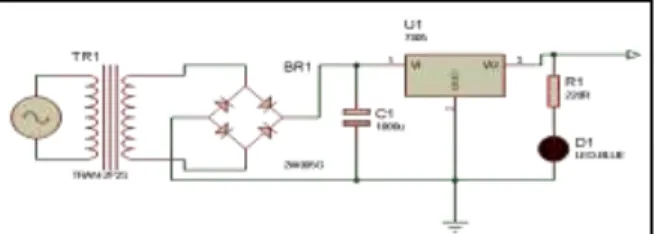
Power Supply atau yang sering disebut dengan Power Supply adalah perangkat yang berguna sebagai sumber listrik untuk perangkat lain. Secara umum, Catu Daya hanya memproduksi peralatan listrik, tetapi ada beberapa Catu Daya yang menghasilkan energi mekanik, dan energi lainnya. Rectifier filter (penyearah), di
mana penyimpangan ini mengubah tegangan bolak-balik yang berasal dari sumber tegangan PLN menjadi tegangan directional murni.
Gambar 1. Rangkaian Catu Daya
2. Sensor Proximity
Proximity sensor merupakan sensor yang digunakan untuk mendeteksi suatu obyek benda berdasarkan jarak benda tersebut terhadap sensor. Proximity sensor ini akan mendeteksi obyek benda dengan jarak yang cukup dekat berkisar 1 mm sampai beberapa centimeter dari sensor. Sensor ini sering diimplementasikan pada industry pabrik, perkantoran, dunia robot, dan lain-lain. Dimana Sensor yang akan digunakan adalah :
- Proximity Inductive : Sensor Jarakxyang digunakanxuntukxSensor Jarakxyang digunakan untukx mendeteksix keberadaanx logamx baikxlogamxjenisxFerrousx maupun logamxjenis non-ferrous. xSensor inixdapatxdigunakan untuk mendeteksixkeberadaan (adaxatau tidakxadanya objekxlogam).
- Proximity Capacitive : Sensor ini tidak hanya dapat melindungi benda logam tetapi juga dapat melindungi benda non-logam dengan mengukur perbedaan kapasitansi medan listrik pada kapasitor.
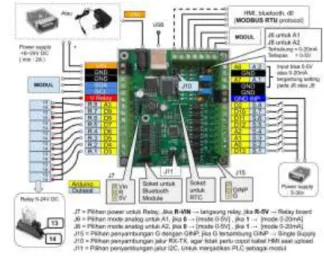
Gambar 2. Sensor Proximity 3. PLC Arduino Outseal
Outseal PLC Shield Outseal adalah sebuah shield (perangkat tambahan) untuk arduino yang dapat menjadi sebuah PLC dengan 8 digital input dan 8 digital output. Outseal PLC Shield sudah mempunyai semua fitur dasar dari PLC dan ditambah lagi dengan beberapa fitur diantaranya mampu menerima masukan tegangan 24 volt, menyediakan driver relay sehingga mampu mengontrol relay secara langsung.
Gambar 3. PLC Arduino Outseal
4. Motor DC
Motor listrik adalah perangkat elektromagnetik yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya memutar pompa impeller, kipas atau blower, menggerakkan kompresor, mengangkat material, dll. Motor listrik juga digunakan di rumah (mixer, bor listrik, kipas angin) dan dalam industri. Motor listrik kadang-kadang disebut industri "kuda kerja"
karena diperkirakan bahwa motor menggunakan sekitar 70% dari total beban listrik di industri.
Gambar 4. Motor DC Sederhana 5. Motor Servo
Motor servo adalah motor dengan sistem umpan balik tertutup di mana posisi motor akan diinformasikan kembali ke pengaturan kontrol di motor servo. Motor ini terdiri dari motor, kombinasi roda gigi, potensiometer, dan sirkuit kontrol.
Potensiometer berfungsi untuk menentukan batas sudut perpindahan servo.
Sedangkan sudut sumbu motor servo diatur oleh lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Ditampilkan dalam gambar dengan denyut 1,5 mS selama periode 2 mS, sudut sumbu motor akan berada di posisi tengah. Semakin
lebar pulsa OFF, semakin besar gerakan sumbu ke arah searah jarum jam dan semakin besar pulsa OFF, semakin besar gerakan sumbu dalam arah yang berlawanan dengan jam.
Gambar 5. Motor Servo 6. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch).
Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Gambar 5. Relay 7. Pompa Air Mini
Mini Water Pump memiliki desain yang kecil dan minimalis. Pompa air ini masuk dalam kategori pompa air fleksibel karena desain nya yang sangat kecil yaitu hanya berukuran sekitar 92 x 46 x 35. Karena ukurannya yang sangat kecil, pemasangan pompa air mini ini relatif cukup mudah, bahkan anda tidak perlu memancing hisapan awal untuk membuat pompa air ini berfungsi.
Selain itu, karena ukurannya yang kecil, pompa air mini ini tidak menggunakan listrik yang besar. Tercatat daya listrik yang dibutuhkan mesin
pompa air mini ini hanya 12 volt saja saat digunakan dan 6 volt saja saat tidak digunakan. Fungsi pompa air kecil ini juga beragam. Memang tidak bisa digunakan untuk keperluan pompa air tanah dan sumur, namun untuk urusan skala kecil selain itu, pompa air mini ini bisa dugunakan dengan baik dalam berbagai kebutuhan.
Gambar 6. Pompa Air Mini
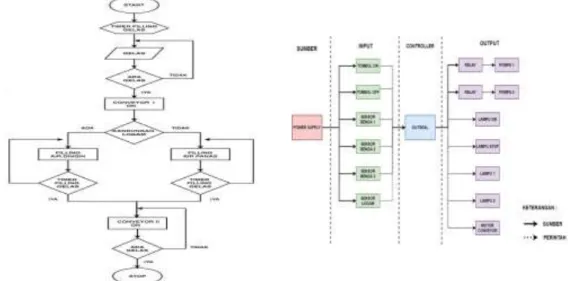
2.2. Flowchart dan Blok Diagram
Gambar 7. Flowchart dan Blok Diagram 3. HASIL PENGUKURAN DAN PERCOBAAN 3.1 Tujuan Pengukuran
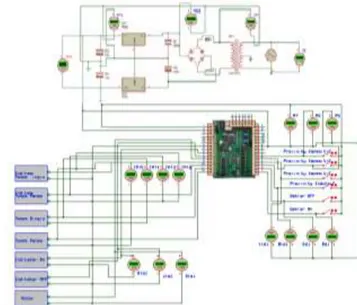
Pengukuran ini bertujuan untuk mendapatkan tegangan keluaran dari setiap blok alat sehingga memudahkan untuk menganalisa rangkaian. Sehingga pada setiap titik pengukuran pada blok rangkaian alat apabila terdapat kekurangan masukan tegangan pada kerja alatkita dapat dengan mudah mengetahuinya dan segera melakukan perbaikannya.
Gambar 8. Titik pengukuran Rangkaian Penuh
3.2 Pengukuran Sensor Proximity
Sebelum diujikan pada alat terlebih dahulu penulis melakukan pengujian secara manual untuk menentukan jarak sensor proximity yang dibutuhkan sesuai dengan program yang disetting pada PLC Outseal. Hasilnya dapat dilihat pada tabel berikut:
Tabel 1. Percobaan Tingkat Pengukuran Sensor Proximity No
Proximity
induktif Proximity
kapasitif Proximity
induktif Proximity
kapasitif Proximity
induktif Proximity kapasitif Logic Jenis benda yang diukur Output (Volt) 1 Normaly
Open Normaly
Open Logam Non Logam 0 0
2 Normaly
Close Normaly
Open Logam Non Logam 5 0
3 Normaly
Close Normaly
Close Logam Non Logam 5 5
Berikut adalah hasil percobaan pengukuran secara manual kebutuhan jarak ukur dan jenis gelas berdasarkan jenis sensor proximity yang digunakan sesuai dengan anjuran standar pemakaian. Dimana pada konsisi keluaran sensor akan sesuai dengan jenis bahan gelas yang terdeteksi oleh sensor.
3.3 Pengukuran Waktu (t) Terhadap Waktu Kerja Pompa
Pengukuruan ini dilakukan pada proses pemindahan cairan dari tanki
pompa mengeluarkan cairan sesuai gelas ukur yang dihasilkan dapat dilihat pada tabel dibawah ini:
Tabel 2. Pengukuran Terhadap Waktu Kerja Pompa
Dari data tabel diatas pengisian gelas tergantung dari waktu yang di program pada alat. Dimana untuk mengisi sebuah gelas dengan volume 200ml dibutuhkan waktu 18 detik, untuk 500 ml di butuhkan waktu 45 detik, dan waktu bisa di atur tergantung dengan besar / volume gelas yang di gunakan. Sehingga dapat di simpulkan bahwa semakin besar ukuran gelas makan semakin lama juga waktu yang di butuhkan untuk pengisian air.
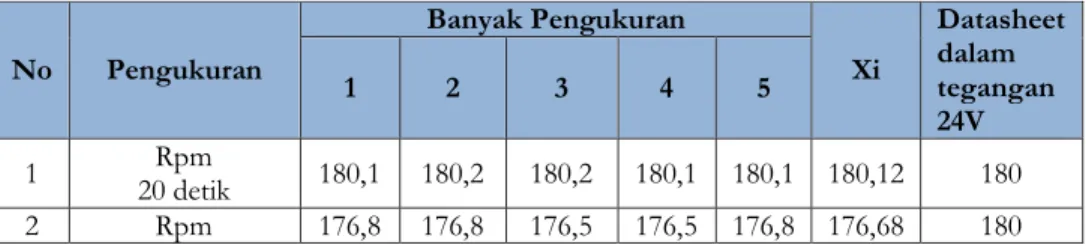
3.4 Pengukuran RPM Motor DC Dalam Kondisi Berbeban
Pengukuran ini dilakukan pada saat motor dc bekerja memutarkan conveyor dengan menggunakan alat pengukur putaran motor (tachometer), maka nilai yg diperoleh dalam waktu putaran selama 20 detik sampai 50 detik ialah sebagai berikut:
Tabel 3. Pengujian kerja Motor DC
No Pengukuran
Banyak Pengukuran
Xi
Datasheet dalam tegangan 24V
1 2 3 4 5
1 Rpm
20 detik 180,1 180,2 180,2 180,1 180,1 180,12 180 2 Rpm 176,8 176,8 176,5 176,5 176,8 176,68 180
NO Ukuran Gelas Waktu (det) Keterangan pengisian
1 1000 ml 90 Penuh
2 500 ml 45 Penuh
3 200 ml 18 Penuh
50 detik 3 Rpm Beban
20 detik 150,5 150,5 150,5 150,5 150,5 150,5 180 4 Rpm Beban
50 detik 141 141 141 141 141 141 180
Dari tabel diatas dapat di simpulkan bahwa dengan adanya beban pada belt conveyor, maka akan semakin kecil tegangan yang di hasilkan oleh motor.
Dimana pengkuruan Rpm tanpa beban lebih besar di bandingkan Rpm dengan beban.
3.5 Pengukuran Pada Power Supply dan Rangkaian
Tabel 4. Hasil Pengukuran Pada Rangkaian
Pada tabel diatas, dapat dilihat dari setiap titik pengukuran hasil yang didapatkan masih sesuai dengan standar keluaran datasheet. Dengan demikian alat yang di buat bekerja dengan baik dan sesuai dengan tegangan kerja alat.
3.6 Hasil Perhitungan
Setelah melakukan pengukuran maka didapatkan nilai dari tiap-tiap pengukuran tersebut. Pada saat pengukuran kemungkinan terjadi kesalahan atau perbedaan dapat terjadi, maka dari itu diperlukannya untuk mengetahui seberapa besar persentasi terjadinya perbedaan dan kesalahan tersebut, berikut perhitungan pada tiap-tiap titik pengukuran:
3.6.1 Perhitungan Tegangan PLN
No Posisi Titik 1 BanyaknyaPengukuran 2 3 4 5 Xi Datasheet 1
Power Supply
(VAC TP
PLN) 225 225 225 225 225 225 220
TP1
(Vrms) 24.1 24.1 24.1 24.1 24.1 24.1 24 TP2 31.3 31.3 31.3 31.3 31.3 31.3 -- TP3 23.5 23.5 23.5 23.5 23.5 23.5 -- TP4
( Idc) 0.4 0.4 0.4 0.4 0.4 0.4 --
Vout TP4 23.8 23.8 23.8 23.8 23.8 23.8 24 2 Sensor TP5 -
TP7 10.8 10.8 10.8 10.8 10.8 10.8 10 - 30 3 Pompa TP12 –
TP15 9.6 9.6 9.6 9.6 9.6 9.6 9 - 12
4 Motor TP 16 5 5 5 5 5 5 5 -14
X =𝑋1+X2+X2+X4+X5
𝑛 = ∑𝑋i𝑛 ……… (1)
Dimana :
∑ Xi = Jumlah seluruh sampel n = Jumlah pengukuran 𝑋̅= Nilai rata-rata.
Hasil yang didapat dari pengukuran: 231 V 3.6.2 Perhitungan Pada Power Supply
- Perhitungan TP2
Tegangan keluaran dari transformator (Vrms) sebesar 24.1 V, kemudian tegangan keluaran tersebut setelah melalui dioda penyearah sebelum melewati kapasitor dapat diketahui dengan pengukuran langsung menggunakan multimeter digital diperoleh nilai sebesar: 31,3 V, nilai tegangan mengalami kenaikan, perlu diketahui bahwa yang kita ukur pada saat keluaran trafo adalah tegangan AC (gelombang sinus) merupakan tegangan RMS (root mean square) (www.baharelectronic.com)
Vrms = 24.1V
Vm = Vrms.√2 ……….. (2) Dimana:
Vm= V max
Vrms=tegangan trafo sekunder = 24.1 Vdc ( lihat tabel 4.5) Vm= 24.1 x √2 = 34.08 V
Dimana VT adalah tegangan diode bridge(0.7 V), Maka VDC adalah :
Vdc= 0.636 x ( Vm – 2VT ) ………..……… (3) = 0.636 x (34.08 – 2 (0.7))
= 0.636 x 32.68 = 20.78 V
Tegangan diode bridges sebelum difilter dengan kapasitor sebesar 20.78 V.
Besarnya ripple tegangan sebelum kapasitor pada penyearah gelombang penuh dengan persamaan sebagai berikut :
Vr( rms) = 0.308 x Vm ……… (4)
= 0.308 x 34.08
= 10.496 V - Perhitungan TP3
Perhitungan TP3 adalah tegangan searah dari dioda yang telah melewati kapasitor (2200μF) sebagai filter untuk memperkecil ripple, perhitungannya sebagai berikut:
Idc = 0.4A
Vdc2 =Vm– 4.17 x Idc𝐶 ……….……..………...… (5) = 34.08 V– 4.17 x 0,0004
0.0022 = 34.08 V– 0.001680.0022 = 34.08 V – 0.758 = 33.32 V
Besarnya ripple tegangan pada P3 setelah melewati kapasitor dapat dihitung dengan persamaan berikut :
Vr( rms) = 0.308 x Vm
= 0.308 x 34.08 = 10.496 V Tegangan Vdc2 setelah ripple adalah :
Vdc2 = 33.32 V − 10.496 V = 22.824 V
Tegangan Vdc setelah melewati kapasitor sebesar 22.824 V dan dalam pengukuran rata-rata sebesar 23.8 V (lihat tabel 4.2). Maka dengan menggunakan persamaan dibawah, diperoleh persentase kesalahan sebesar:
% Kesalahan = |pengukuran−perhitungan
pengukuran | × 100% ... (6)
% Kesalahan = |datasheet−pengukuran
datasheet | × 100% ... (7)
% Kesalahan = |24,8−23.8
24,8 | × 100%= 0,403 % 3.6.3 Perhitungan Debit Air
Debit air adalah banyaknya volume cairan yang mengalir pada suatu satuan waktu.Untuk volumenya sendiri biasanta dinyatakan dalam satuan liter atau m3 dan untuk waktunya biasanya dalam waktu jam, menit, bahkan detik.
Debit Air = Volume Cairan
Waktu aliran = 𝑉𝑡 = m3𝑠 = L
𝑠…...……….. (8) Untuk pengisian gelas dengan volume 200 ml yang di atur selama 18 detik, maka debit air adalah sebagai berikut :
Debit Air = 20018 = 11.12 ml/s 3.6.4 Perhitungan Motor DC
Dari data pengukuran pada tabel 4.4 Hasil pengukuran tegangan input dan rpm pada saat motor dc berkerja untuk menjalankan belt tanpa beban dan dengan beban, kita dapat mencari daya pada saat motor dc bekerja, dengan menggunakan persamaan sebagai berikut :
𝑃 =T.n.2π60 ……….. (9) Dimana
Daya pada saat tidak ada beban : P = Daya (Watt) T = Torsi (0,078 Nm)
n = RPM (180.1) “ Tanpa Beban”
π = Jari – jari (3,14)
Maka, 𝑃 =(0,078).(180.1).2.(3,14)
60 = 1,47 Watt Daya pada saat ada beban :
P = Daya (Watt) T = Torsi (0,078 Nm)
n = RPM (150.5) “ Ada Beban”
π = Jari – jari (3,14) Maka, 𝑃 =(0,078).(150.5).2.(3,14)
60 = 1,22 Watt 3.6.5 Perhitungan Pompa
Untuk menghitung Torsi pada Pompa dengan menggunakan peresamaan berikut:
T = 5250 𝑥 𝑃
𝑛 ……….. (4.10)
Dimana :
P = Daya (Watt)
T = Torsi (Nm / Newton meter) n = RPM
Dengan menggunakan persamaan diatas kita dapat menghitung torsi pada Pompa dimana :
T = 5250 𝑥 𝑃𝑛 T = 5250 𝑥 4.2 T = 4.79 Nm 4600
3.7 Perhitungan Persentasi Kesalahan
Maka hasil pengukuran persentase kesalahan dapat dilihat pada tabel berikut:
Tabel 5. Persentasi Kesalahan No Titik pengukuran Datasheet
(Volt) Pengukuran
( Volt) Perhitungan
( Volt) Kesalahan (%)
1 Vrms 24 24,1 - *
2 Vdc (kapasitor) - 23.5 22.82 0,65
3 Vout 24 23.8 22.82 1
4 PLC 5 5 - *
5 Sensor 10 - 30 10.8 - *
6 Pompa DC 9 - 12 9.6 - *
7 Motor DC 5 -14 5 - *
Catatan: * masih dalam range kerja komponen
Setiap pengukuran yang dilakukan asih dalam range kerja komponen dimana tidak ada persentasi kesalahan yang melebihi 2%. Dengan demikian alat yang di buat bekerja sesuai dengan rancangan penulis.
3.8 Analisa
Analisa pada setiap pengukuran sebagai berikut:
1. Analisa rangkaian power supply dengan tegangan output 24 VDC dengan trafo CT yang berfungsi sebagai penurun tegangan dari 220 VAC dari lilitan primer ke 24VAC melalui lilitan Sekunder. Selanjutnya diubah dari arus VAC menjadi Arus VDC. Melalui dioda IN5401 Penyearah Gelombang Penuh kemudian tegangan masuk melalui kapasitor 2200 uF yang berfungsi menahan arus agar tidak berlebihan. ketika masuk ke IC regulator 7824 yang bekerja pada tegangan positif dan bertindak menghasilkan tegangan yang positif pula. Dimana untuk pengukuran yang di dapat adalah 23.8 VDC sehingga antara datasheet dan rangkaian yang telah dibuat sesuai.
2. Untuk tegangan input outseal V.4 sebesar 5 VDC – 24 VDC dan di setting pada tegangan 5 VDC dengan arus 2 A, ini berarti bahwa PLC Outseal bekerja dengan tegangan stabil sesuai dengan input dan output pada datasheet.
3. Untuk waktu pengisian air pengukuran dilakukan pada saat pompa hidup dan mengisi selama waktu yang ditentukan hingga dapat mengisi gelas hingga penuh. Dimana debit air dihitung dari berapa jumlah volume yang dialirkan, dibagi dengan waktu yang di butuhkan.
4. Untuk sensor proximity pengukuran dilakukan pada saat tegangan masuk keluar dari sensor sebesar 10.8 V DC ini berarti tegangan keluaran masih sesuai dengan datasheet.
5. Untuk motor DC dilakukan pengukuran pada saat motor DC mendapat tegangan input, dan hasil pengukurannya didapat 5 V DC ini membuktikan bahwa tegangan yang diterima oleh motor DC sesuai dengan Tegangan yang dikirim oleh relay dari Outseal V.4.
6. Tegangan masukan yang diterima relay pompa air DC pada saat bekerja sebesar 10.8 VDC ini membuktikan bahwa tegangan yang diterima oleh pompa dari tegangan keluaran PLC outseal adalah 9.6 VDC itu artinya masih dalam range yang sama
.
Dari perancangan, pengujian, dan analisis mengenai “Rancang Bangun Filling Water otomatis berdasarkan jenis gelas menggunakan PLC ( Programmable Logic Controller) Outseal” yang telah dilakukan maka dapat simpulkan bahwa alat yang di buat bekerja dengan baik dimana tegangan input yang dihasilkan power supply sesuai dengan datasheet.
Sensor benda dapat mendeteksi adanya benda sesuai dengan waktu yang telah di tentukan dan sensor logam dapat menentukan pompa yang akan bekerja dalam pengisian air, Serta Pompa pengisian dapat mengisi gelas sampai penuh sesuai dengan waktu yang telah di perhitungkan.
REFERENSI
[1] Airlangga, Fatoni Gea, dkk. Perancangan Sistem Otomasi Pada Pengemasan Susu Dalam Botol Dengan Programmable Logic Contoller (PLC) Omron CP1E.
Transient, Vol.6, No. 1, Maret 2017.
[2] Bahtiar, agung. Buku Intruksi PLC Outseal. Malang. 28 Desember 2017.
[3] BS Noersasongko Wahyu. Pedoman Dasar Elektronika Untuk Pemula.
Pekalongan. 1997.
[4] Budiyanto, M., A. Wijaya. Pengenalan Dasar-dasar PLC (Programmable Logic Controller), Gava Media, Yogyakarta. 2004.
[5] Chaerunnisa, dkk. Aplikasi PLC Pada Alat Pengisian Air Minum Otomatis. Vol 2 No 2 (2018): Jurnal Elektra.
[6] Manurung Sonti, Gimin, Rusli Ridwan. Teknik Elektronika. Bandung : Angkasa. 1997.
[7] Tooley, Michael. Rangkaian elektronik prinsip dan aplikasi. Jakarta. 2002.
[8] Zuhal , Zhanggischan. Prinsip Dasar Elektroteknik. Gramedia Pustaka Utama. Jakarta. 2004.