i x
TUGAS AKHIR – TE 141599
PERANCANGAN KONTROLER
NEURAL NETWORK-
PID
UNTUK PENGATURAN KECEPATAN MOTOR DC
BRUSHLESS
Tri Wahyu Kurniawan NRP 2211100073
Dosen Pembimbing
Ir. Rusdhianto Effendi A.K., MT. Ir. Ali Fatoni, MT.
JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya 2016
ii
iii FINAL PROJECT – TE 141599
DESIGN OF NEURAL NETWORK-
PID
CONTROLLER FOR
SPEED CONTROL OF BRUSHLESS
DC
MOTOR
Tri Wahyu Kurniawan NRP 2211100073
Advisors
Ir. Rusdhianto Effendi A.K., MT. Ir. Ali Fatoni, MT.
DEPARTMENT OF ELECTRICAL ENGINEERING Faculty of Industrial Technology
iv
KATA PENGANTAR
Alhamdullilah, puji syukur penulis panjatkan kehadirat Allah SWT karena atas berkah, rahmat, ijin dan karunia-Nya penulis dapat menyelesaikan penulisan buku Tugas Akhir dengan judul “Perancangan Kontroler Neural Network-PID Untuk Pengaturan Kecepatan Motor DC Brushless. Tugas Akhir ini disusun untuk memenuhi salah satu persyaratan menyelesaikan pendidikan sarjana pada Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember.
Penulis menyadari bahwa dalam pelaksanaan dan penyelesaian Tugas Akhir ini banyak mengalami kendala, namun berkat bantuan, bimbingan, dan kerjasama dari berbagai pihak semua kendala tersebut dapat diatasi. Oleh karena itu pada kesempatan ini penulis ingin menyampaikan banyak terimakasih, rasa hormat dan penghargaan setingi-tingginya kepada :
1. Bapak Ir. Katjuk Astrowulan M.S. E. E. selaku orang tua yang telah memberikan dukungan, semangat, dan doa.
2. Bapak Rusdhi dan Bapak Ali selaku dosen pembimbing mata kuliah Tugas Akhir Teknik Elektro ITS.
3. Bapak Dr. Ardyono Priyadi, ST. M.Eng. selaku Ketua Jurusan Teknik Elektro ITS.
4. Rekan-rekan e51 angkatan 2011 Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember atas momen kekeluargaan dan kerja sama yang luar biasa selama berkuliah di Teknik Elektro ITS.
Penulis menyadari bahwa pada penyusunan laporan Tugas Akhir ini masih terdapat beberapa kekurangan dikarenakan keterbatasan kemampuan penulis, walaupun demikian penulis berharap Tugas Akhir ini dapat bermanfaat bagi khalayak dan pihak-pihak yang membutuhkan.
Surabaya, 12 Januari 2016
ix
PERANCANGAN KONTROLER NEURAL NETWORK-PID UNTUK PENGATURAN KECEPATAN MOTOR DC
BRUSHLESS
Tri Wahyu Kurniawan 2211100073
Dosen Pembimbing I : Ir. Rusdhianto Effendi A.K., MT. Dosen Pembimbing II : Ir. Ali Fatoni, MT.
ABSTRAK
Dalam perancangan tugas akhir ini, tujuan yang diinginkan adalah mengatur kecepatan Motor DC Brushless ketika kondisi tanpa beban maupun diberikan pembebanan dengan menggunakan metode kontroler Neural Network-PID. Neural Network digunakan untuk learning dengan menggunakan metode back propagation untuk mendapatkan bobot wkp,
wki, wkd yang tepat agar nilai dari parameter Kp, Ki, Kd untuk kontroler
PID sama dengan nilai Kp, Ki, dan Kd yang didapatkan dari parameter
plant. Kontroler PID digunakan untuk mengatur kecepatan motor arus searah tanpa sikat. Berdasarkan hasil simulasi didapatkan nilai Kp = 0,238
, Ki = 1,148 , Kd = 0,013.
x
xi
DESIGN OF NEURAL NETWORK-PID FOR SPEED CONTROL
OF BRUSHLESS DC MOTOR
Tri Wahyu Kurniawan 2211100073
Supervisor I : Ir. Rusdhianto Effendi A.K., MT. Supervisor II : Ir. Ali Fatoni, MT.
ABSTRACT
In designing this final project, the desired goal is to adjust the speed of Brushless DC motor no-load or with load using Neural Network-PID controller. Neural Network is used for learning with back propagation method to obtain a precise wkp, wki, wkd so the value of parameter Kp,
Ki, Kd for the PID controller is equal with Kp, Ki, Kd obtained from plant
parameters. PID controller is used to control the speed of BLDC motor. Based on simulation results, the value of Kp, Ki, and Kd respectively are
Kp= 0.238, Ki = 1.148, and Kd = 0.013.
xii
xv
DAFTAR ISI
1
HALAMAN JUDUL ... i
LEMBAR PENGESAHAN ... vii
ABSTRAK ... ix
1.1. Latar Belakang ... 1
1.2. Perumusan Masalah ... 1
1.3. Batasan Masalah ... 1
1.4. Tujuan Penelitian ... 2
1.5. Sistematika Penulisan ... 2
1.6. Relevansi ... 3
BAB 2 DASAR TEORI ... 5
2.1. Motor DC Brushless ... 5
2.1.1.Konstruksi Motor DC Brushless (BLDC) ... 5
2.1.2.Prinsip Kerja Motor BLDC ... 5
2.2. Rem Elektromagnetik ... 6
2.3. Arduino Uno ... 8
2.4. Identifikasi Sistem ... 9
2.4.1.Sinyal Pseudo Random Binary Sequence (PRBS) ... 11
2.5. MATLAB ... 11
2.6. NeuralNetwork (NN) / Jaringan Saraf Tiruan (JST) ... 12
2.7. Back Propagation Neural Network (BPNN) ... 13
2.8. Kontroler PID (Proportional-Integral-Derivative) ... 14
BAB 3 PERANCANGAN SISTEM ... 17
3.1. Gambaran Umum Sistem ... 17
3.2. Perancangan Perangkat Keras ... 17
3.2.1.Perancangan Mekanik ... 18
3.2.2.Perancangan Elektronik ... 20
3.3.1.Mikrokontroler Arduino ... 21
xvi
3.3.1.Software Arduino ... 22
3.3.2.Software MATLAB ... 23
3.4. Identifikasi dan Pemodelan Sistem ... 24
3.5. Perancangan Kontroler Neural Network-PID ... 25
3.5.1.Perancangan Kontroler NeuralNetwork ... 25
3.5.2.Perancangan Learning pada Kontroler Neural Network ... 25
BAB 4 PENGUJIAN DAN ANALISA ... 29
4.1. Gambaran Umum Pengujian Sistem ... 29
4.2. Pengujian Perangkat Keras ... 29
4.2.1.Pengujian Open Loop Kecepatan Motor ... 29
4.2.2.Pengujian Rem Elektromagnetik ... 30
4.3. Simulasi Sistem ... 30
4.3.1 Simulasi dengan Menggunakan Kontroler Neural-Network .... 30
4.3.2 Proses Learning Kontroler Neural-Network ... 30
4.3.3 Proses Simulasi Kontroler ... 31
4.3.4 Pengujian Simulasi Respon dengan Kontroler ... 31
4.4. Realisasi Plant Sistem Motor BLDC ... 31
4.4.1.Pengujian Respon Implementasi Kontroler Neural-Network .. 32
4.4.2.Respon pada Semua Kondisi Pembebanan ... 33
4.5. Hasil Simulasi ... 34
xv
CHAPTER 1 INTRODUCTION ... .1
1.1. Background ... .1
1.2. Problem Formulation ... .1
1.3. Scope of Problem ... .1
1.4. Research Purpose ... .2
1.5. Writing Sistematics ... .2
1.6. Relevance... .3
CHAPTER 2 LITERATURE ... .5
2.1. Brushless DC Motor ... .5
2.1.1.Construction of Motor Brushless DC (BLDC) ... .5
2.1.2.Work Principle of Motor BLDC ... .5
2.2. Electromagnetic Brake ... .6
2.3. Arduino Uno ... .8
2.4. System Identification ... .9
2.4.1.Pseudo Random Binary Sequence Signal (PRBS) ... .11
2.5. MATLAB ... .11
2.6. Neural Network (NN) / Jaringan Saraf Tiruan (JST) ... .12
2.7. Back Propagation Neural Network (BPNN) ... .13
2.8. PID Controller (Proportional-Integral-Derivative) ... .14
CHAPTER 3 SYSTEM DESIGN ... .17
3.1. General Overview of the System ... .17
3.2. Hardware Design ... .17
3.2.1.Mechanical Design ... .18
3.2.2.Electronic Design ... .20
3.3.1.Arduino Microcontroller ... .21
3.3. Software Design ... .22
xvi
3.3.2.SoftwareMATLAB ... .23
3.4. System Identification and Modelling ... .24
3.5. Neural Network-PID Controller Design... .25
3.5.1.Neural Network Controller Design ... .25
3.5.2.Learning in Neural Network Controller Design ... .26
CHAPTER 4 EXAMINATION AND ANALYSIS ... .29
4.1. General Overview System Testing ... .29
4.2. Hardware Testing ... .29
4.2.1.Motor Speed Open Loop Testing... .29
4.2.2.Electromagnetic Brake Testing... .30
4.3. System Simulation ... .30
4.3.1 Simulation with Neural-Network Controller ... .30
4.3.2 Learning Process in Neural-Network ... .30
4.3.3 Controller Simulation Process ... .31
4.3.4 Simultion Response Testing with Controller ... .31
4.4. BLDC Motor Plant Realization ... .31
4.4.1.Implementation Response of Neural-Network Controller Testing ... .33
4.4.2.Response in All Load Condition ... .33
4.5. Simulation Results ... .34
xvii
DAFTAR GAMBAR
Gambar 2.1 Pergerakan Eksitasi Fase Fluks pada Motor BLDC ... 6
Gambar 2.2 Tampilan Arus Eddy ... 7
Gambar 2.3 Tampilan Rem Elektromagnetik... 8
Gambar 2.4 Tampilan Arduino Uno ... 9
Gambar 2.5 Sinyal Uji Pseudo Random Binary Sequence ... 11
Gambar 2.6 Struktur Neural Network ... 13
Gambar 2.7 Struktur Kontroler PID ... 15
Gambar 3.1 Motor DC Brushless ... 19
Gambar 3.2 Ilustrasi Penampang Rem Elektromagnetik ... 20
Gambar 3.3 Tampilan Software Arduino IDE... 23
Gambar 3.4 Struktur Neural Network ... 25
Gambar 3.5 Blok SimulinkNeural Network-PID ... 27
Gambar 3.6 Blok SimulinkPlant Sistem Motor BLDC ... 27
Gambar 4.1 Respon Realisasi Motor BLDC ... 32
Gambar 4.2 Respon Plant Beban Minimal ... 35
Gambar 4.3 Respon Plant Beban Nominal ... 35
Gambar 4.4 Respon Plant Beban Maksimal ... 36
xviii
xix
DAFTAR TABEL
Tabel 2.1 Spesifikasi Arduino Uno ... 8
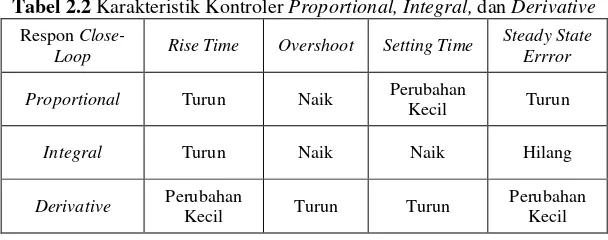
Tabel 2.2 Karakteristik Kontroler Proportional, Integral, dan Derivative ... 15
Tabel 3.1 Spesifikasi Rem Elektromagnetik ... 20
Tabel 3.2 Identifikasi Sistem...24
xx
1
BAB 1
PENDAHULUAN
1.1.
Latar Belakang
Motor listrik merupakan salah satu peralatan yang sering digunakan oleh masyarakat, baik dalam peralatan kebutuhan masyarakat maupun dalam dunia industri. Brushless Direct Current (BLDC) Motor ini merupakan inovasi baru dalam dunia indutri motor listrik. Beberapa karakteristik yang menjadi pertimbangan pemilihan BLDCMotor, antara lain torsinya besar, suaranya halus, memiliki daya yang besar, dan dapat dikontrol dengan mudah. [1]
Pada Tugas Akhir ini digunakan dua metode kontrol yang akan digunakan untuk mengatur kecepatan BLDC, yaitu metode kontrol Neural Network (NN), dan metode kontrol Proportional (P), Integral (I), Derivative (D). PID Controller (Proportional, Integral and Derivative) adalah suatu kontroler yang digunakan untuk menentukan sistem tersebut presisi atau tidak dengan menggunakan karakteristik feedback (umpan balik) pada sistem. Neural Network (NN) adalah suatu sistem yang memproses informasi yang memiliki karakteristik mirip dengan biologicalneuralnetwork (jaringan saraf biologis). Kedua metode kontrol tersebut dapat dipilih untuk melengkapi karakteristik pengaturan satu sama lain. Keunggulan Neural Network ialah dapat beradaptasi terhadap parameter PID dengan melakukan perubahan bobot kemudian perubahan bobot Neural Network tersebutakan digunakan untuk men-tuning PID agar mendapatkan Kp, Ki, Ti, Td.
1.2.
Perumusan Masalah
Adapun rumusan masalah yang akan dibahas dalam tugas akhir ini, yaitu:
1. Bagaimana merancang sistem yang menggunakan plant MotorDC Brushless untuk memperoleh kecepatan putar motor yang presisi. 2. Bagaimana merancang kontroler Neural Network-PID yang
optimal pada sistem hasil rumusan butir 1 tersebut di atas.
1.3.
Batasan Masalah
2
mikrokontroler Arduino Uno Rev 3, dan software MATLAB R2013a.
b. Range kerja kecepatan dari Motor DC Brushless yang akan diteliti berada pada range kecepatan 1250-2250 RPM.
1.4.
Tujuan Penelitian
Tujuan dari penelitian Tugas Akhir ini, adalah sebagai berikut: 1. Merancang sistem pengaturan kecepatan Motor DC Brushless
untuk memperoleh kecepatan putar motor yang presisi.
2. Merancang kontroler Neural Network-PID yang optimal untuk memenuhi tujuan pada butir 1 tersebut di atas.
Hasil yang diperoleh dari pelaksanaan tugas akhir diharapkan dapat memberikan informasi atau pengetahuan mengenai perancangan Motor DC Brushless terhadap pengaturan kecepatan dengan menggunakan kontroler Neural Network-PID.
1.5.
Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini terbagi atas enam bagian yang tersusun seperti berikut :
BAB 1: PENDAHULUAN
Bab ini berisikan tentang latar belakang, rumusan masalah, tujuan pelaksanaan, metodologi penulisan, relevansi, serta sistematika penulisan laporan tugas akhir.
BAB 2: DASAR TEORI
Bab ini berisikan penjelasan dasar mengenai hal-hal yang berhubungan dengan Tugas Akhir, yaitu Motor DC Brushless, Neural Network (NN), Proportional Integral Devriatif (PID). BAB 3: PERANCANGAN SISTEM
Bab ini berisikan tentang penjelasan mengenai prancangan hardware dan software yang digunakan dalam pengerjaan Tugas Akhir.
BAB 4: PENGUJIAN DAN ANALISIS
Bab ini membahas mengenai implementasi dan hasil simulasi terhadap plant Motor DC brushless yang menggunakan kontroler NeuralNetwork-PID.
3
Bab ini berisikan kesimpulan dan saran dari pembahasan yang telah dijelaskan pada laporan Tugas Akhir ini.
1.6.
Relevansi
Hasil yang diperoleh dari Tugas Akhir diharapkan dapat memberikan manfaat, antara lain:
1. Dapat dijadikan referensi dalam pembuatan sistem perancangan kontroler untuk pengaturan kecepatan motor jenis Motor DC Brushless.
4
5
BAB 2
DASAR TEORI
2.1.
Motor DC
Brushless
[1]
Motor DC Brushless adalah jenis motor sinkron 3 fase yang medan magnetnya dihasilkan oleh stator dan rotor yang berputar pada frekuensi yang sama. Motor jenis ini mempunyai magnet permanen pada bagian rotor, sedangkan elektromagnet-nya berada pada bagian stator-nya. Setelah itu, dengan menggunakan sebuah rangkaian sederhana, maka kita dapat mengubah arus di elektromagnet-nya ketika bagian rotor-nya berputar. Sesuai dengan namanya, Motor DC Brushless tidak menggunakan sikat atau brush untuk pergantian medan magnet (komutator), melainkan menggunakan komutator elektronik. Motor BLDC mempunyai banyak keuntungan dibandingkan dengan motor DC dan Motor Induksi biasa.
2.1.1.
Konstruksi Motor DC
Brushless
(BLDC)
Dua bagian inti yang dimiliki Motor DC Brushless (BLDC), yaitu stator (yang diam) dan rotor (yang berputar). Bagian inti yang penting lainnya adalah gulungan stator dan magnet rotor.
a. Rotor
Rotor adalah bagian dari motor yang berputar karena ada elektromagnetik dari stator. Rotor berasal dari dua magnet permanen, yaitu magnet utara (N) dan magnet selatan (S). b. Stator
Stator adalah bagian dari motor yang tidak bergerak atau diam yang berfungsi sebagai medan putar pada motor untuk memberikan elektromagnetik pada rotor dan terdapat 12 belitan (elektromagnet).
2.1.2.
Prinsip Kerja Motor BLDC
6
pertama akan menolak sisi north yang kedua dan seterusnya apabila kedua sisi magnet mempunyai kutub yang sama.
Prinsip mengenai kutub magnet tersebut dapat diterapkan dalam prinsip kerja motor BLDC. Secara umum motor BLDC memiliki medan magnet permanen pada rotor dan magnet yang berasal dari gaya elektromagnet (magnet yang ditimbulkan dari pemberian input arus listrik) pada bagian kumparan stator.
Pada motor BLDC, kontroler berfungsi untuk mengatur arus masukan yang harus dialirkan ke kumparan stator untuk dapat menimbulkan medan elektromagnet yang sesuai untuk memutar rotor. Hal inilah yang menjadi pembeda dengan motor DC konvensional, dan menggantikan kerja komutasi mekanisnya.
Magnet permanen pada motor BLDC dilengkapi dengan kumparan tiga fase. Kumparan-kumparan tersebut terletak di bagian stator. Magnet bergerak terletak di stator. Fase kumparan diaktifkan dengan menyesuaikan gerakan rotor. Rotasi berbasis medan magnet diilustrasikan pada Gambar 2.1 (a) dan Gambar 2.1 (b) menjelaskan pergerakan dan eksitasi fase. Pada Gambar 2.1 (a) fase A dieksitasi, fluks stator dihasilkan oleh eksitasi fase A, fluks rotor dihasilkan oleh magnet permanen.
(a) Fase Pergerakan (b) Fase Eksitasi
2.2.
Rem
Elektromagnetik [2]
7
tersebut diapit oleh sisi stator berupa sistem lilitan elektromagnetik yang dapat membangkitkan medan magnet dari aliran listrik. Arus listrik menimbulkan medan magnet pada lilitan. Logam piringan yang memotong medan magnet tersebut menimbulkan arus Eddy pada piringan itu sendiri. Arus Eddy ini menimbulkan medan magnet yang arahnya berlawanan dengan medan magnet sebelumnya, sehingga menghambat gerakan putar dari poros tersebut.
Arus Eddy merupakan arus listrik yang timbul apabila suatu piringan logam non ferromagnetik berada di sekitar medan magnet yang garis gayanya sedang berubah-ubah. Medan magnet yang dihasilkan oleh arus Eddy ini berlawanan arah dengan arah gerakan piringan logam. Dengan demikian medan magnet yang ditimbulkan oleh arus Eddy akan menghambat laju piringan logam tersebut. Gambar 2.2 dan Gambar 2.3 merupakan tampilan arus Eddydan tampilan rem elektromagnetik.
8
2.3.
Arduino Uno [3]
Arduino Uno adalah board mikrokontroler berbasis Atmega328. Alat ini mempunyai 14 pin input/output digital dan 6 di antaranya dapat digunakan sebagai output PWM, 6 input analog, resonator keramik 19MHz, koneksi USB, soket listrik, ICSP header, dan tombol reset. Dengan kabel USB, alat ini mudah dihubungkan ke komputer dan dapat diaktifkan dengan baterai atau adaptor AC ke DC. Spesifikasi Arduino Uno dapat dilihat pada Tabel 2.1.
Tabel 2.1 Spesifikasi Arduino Uno
Mikrokontoler Arduino Atmega 328
Tegangan Operasi 5 V
Tegangan Input (direkomendasikan)
7 - 12 V
Tegangan Input (Batasan) 6 - 20 V
Pin Input / Output Digital 14 (6 di antaranya output PWM)
Pin Input Analog 6
Arus DC Tiap Pin I / O 40 mA
Arus DC Untuk Pin 3,3 V 50 mA
9
memiliki tegangan operasi 5V dan dapat menerima arus maksimum 40mA. Beberapa pin memiliki fungsi khusus, antara lain:
a. Serial: 0 (RX) dan 1 (TX). Pin ini digunakan untuk menerima (RX) dan mengirim (TX) data serial TTL. Pin ini terhubung dengan pin pada Atmega8U2 USB ke cip USB ke TTL serial
b. External Interrupts: 2 dan 3. Pin ini digunakan sebagai trigger gangguan pada nilai yang rendah, menaikkan dan menurunkan nilai, atau merubah nilai.
c. PWM: 3, 5, 6, 9, 10, dan 11. Pin ini menyediakan output PWM 8bit dengan fungsi analogWrite( ).
d. SPI (Serial PeripheralInterface) : 10 (Slave Select), 11 (Master Out Slave In), 12 (Master In Slave Out), 13 (Serial Clock). Pin ini mendukung komunikasi SPI.
e. LED: 13, LED ini terhubung dengan pin 13. Ketika pin memiliki nilai yang tinggi, maka LED akan on dan ketika pin memiliki nilai yang rendah, maka LED akan off
Ilustrasi rancangan penampang arduino uno yang digunakan pada plant motor BLDC dapat dilihat pada Gambar 2.4.
2.4.
Identifikasi Sistem [4]
Identifikasi sistem merupakan suatu langkah awal dalam menganalisa sistem dinamik. Menurunkan suatu model matematika yang baik dan sesuai merupakan salah satu bagian terpenting dalam proses menganalisa sebuah sistem secara keseluruhan. Model matematika yang baik dan sesuai cocok digunakan untuk analisa, prediksi, dan desain sistem, regulator, dan filter. Model matematika memiliki bentuk yang bermacam-macam. Salah satu bentuknya adalah transfer function yang
10
cocok untuk permasalahan analisa transien dan sebuah sistem LTI (Linear Time Invariant) dan sistem dengan Single-Input Single-Output (SISO). Di sisi lain, model matematika dengan bentuk state space sangat cocok untuk menganalisa suatu sistem dengan Multiple-Input Multiple-Output (MIMO).
Model matematika dari sebuah sistem dapat diperoleh melalui dua cara yaitu permodelan fisik dan identifikasi sistem. Permodelan fisik merupakan pendekatan analitik berdasarkan hukum fisika seperti hukum Newton dan hukum kesetimbangan. Permodelan ini menjelaskan dinamika dalam sistem. Yang kedua adalah identifikasi sistem. Hal ini dilakukan dengan pendekatan eksperimental. Model ini berdasarkan data dari eksperimen yang kemudian didapatkan nilai parameter sistem. Pada beberapa kasus yang sangat kompleks, sangat sulit untuk menentukan model berdasarkan pemahaman fisik.
Identifikasi sistem pada suatu sistem dapat dilakukan dengan menggunakan metode identifikasi statis maupun dinamis. Identifikasi statis dilakukan untuk mendapatkan gain dan time sampling dari suatu sistem. Identifikasi statis pada suatu sistem dilakukan dengan memberikan suatu inputsetpoint yang bernilai konstan terhadap waktu. Sistem yang digunakan untuk identifikasi statis adalah sistem dengan loop terbuka tanpa kontroler, sedangkan pada identifikasi dinamis, prosedur identifikasinya memiliki beberapa perbedaan mendasar, di antaranya adalah perbedaan antara sinyal uji dan metode pemodelan yang digunakan. Jika identifikasi statis menggunakan input setpoint yang konstan terhadap waktu, maka identifikasi dinamis menggunakan sinyal acak atau random sebagai sinyal ujinya. Pada Tugas Akhir kali ini digunakan metode identifikasi dinamis. Pemilihan metode ini disebabkan karena respon yang sangat cepat dari motor BLDC, sehingga sangat sulit untuk mengamati respon transien dari sistem jika menggunakan identifikasi statis.
Terdapat beberapa perbedaan mendasar antara identifikasi statis dan dinamis. Perbedaan tersebut di antaranya adalah perbedaan antara sinyal uji dan metode pemodelan yang digunakan. Jika identifikasi statis menggunakan input setpoint yang konstan terhadap waktu, maka identifikasi dinamis menggunakan sinyal acak atau random sebagai sinyal ujinya. Sinyal ini memiliki frekuensi yang berubah-ubah, sehingga memungkinkan karakteristik sistem dapat diketahui secara lebih teliti.
11
Sinyal tersebut dinamakan sinyal Pseudo-Random Binary Square (PRBS). Sinyal PRBS seperti pada Gambar 2.5 mirip dengan bilangan acak secara nyata, tapi juga dapat disebut semu atau pseudo karena bersifat deterministik. Sinyal PRBS dapat dihasilkan dari penggunaan shift register. Salah satu contoh sinyal uji PRBS dapat dilihat pada Gambar 2.5.
2.5.
MATLAB [5]
MATLAB merupakan paket program dengan bahasa pemrograman yang tinggi untuk mengembangkan algoritma, visualisasi data, dan komputasi numerik. Program MATLAB ini dapat digunakan untuk menyelesaikan masalah komputasi dengan lebih cepat dibandingkan dengan bahasa pemrograman tradisional, seperti C, C++, dan Fortran. MATLAB digunakan untuk banyak aplikasi seperti signal and image processing, desain kontrol, pengujian dan pengukuran, permodelan, dan analisis.
Simulink merupakan bagian dari MATLAB untuk memodelkan, mensimulasikan, dan menganalisa sistem dinamik. Simulink dapat membentuk model dari awal atau memodifikasi model yang sudah ada sesuai dengan apa yang diinginkan. Selain itu simulink juga mendukung sistem linier dan nonlinier, pemodelan waktu kontinyu atau diskrit, atau gabungan. Simulink ini dapat digunakan sebagai media untuk
Waktu (detik)
12
menyelesaikan masalah dalam industri nyata, yang meliputi kedirgantaraan dan pertahanan, otomotif, komunikasi, elektronik dan pemrosesan sinyal.
Salah satu modul dalam Simulink yang dapat digunakan untuk komunikasi perangkat keras adalah Instrument Control Toolbox. Modul ini merupakan kunpulan fungsi m-file yang dibangun pada lingkungan komputasi teknis MATLAB. Toolbox ini menyediakan kerangka kerja untuk komunikasi instrumen yang mendukung GPIB interface, standar VISA, TCP/IP, dan protokol UDP. Toolbox ini memperluas fitur dasar serial port yang ada dalam MATLAB. Selain itu, toolbox ini berfugsi untuk komunikasi data antara workspace MATLAB dan peralatan lainnya. Data tersebut dapat berbentuk biner atau text.
Komunikasi serial merupakan protokol dasar tingkat rendah untuk komunikasi antara dua peralatan atau lebih. Pada umumnya satu komputer dilengkapi dengan modem, printer, mikrokontroler, atau peralatan lainnya. Serial port mengirim dan menerima informasi bytes dengan hubungan seri. Bytes tersebut dikirimkan menggunakan format biner atau karakter ASCII (American Standard Code for Information Interchange). Dalam komunikasi serial MATLAB, agar data ASCII dapat diproses real time, maka digunakan ASCII encode dan decode yang terdapat pada xPC Target Library for RS232. ASCII encode merupakan blok dalam simulink yang digunakan untuk mengubah data bytes menjadi karakter ASCII, sedangkan ASCII decode merupakan blok Simulink yang digunakan untuk mengubah karakter ASCII menjadi data bytes yang kemudian dapat dikonversi sesuai kebutuhan.
2.6.
Neural
Network
(NN) / Jaringan Saraf Tiruan (JST) [6]
Neural Network (NN) adalah Suatu sistem pemproses informasi yang mempunyai karakteristik yang mirip dengan jaringan saraf biologis.
Neural Network ini merupakan generalisasi pemodelan matematis dalam proses kognitif berdasarkan asumsi :
1.) Pemprosesan informasi terjadi pada elemen sederhana yang dinamakan neuron.
2.) Sinyal antar neuron berhubungan melalui saluran penghubung. 3.) Setiap saluran penghubung mempunyai nilai bobot, dan
13
4.) Setiap neuron mempunyai fungsi aktifasi (biasanya tidak linier) pada masukan total (bagi neuron tersebut) untuk mendapatkan sinyal keluarannya.
Ilustrasi rancangan kontroler neural network yang digunakan pada plant motor BLDC dapat dilihat pada Gambar 2.6.
2.7.
Back Propagation Neural Network
(BPNN) [6]
BPNN merupakan algoritma pelatihan terbimbing yang mempunyai banyak lapisan. BPNN menggunakan erroroutput untuk mengubah nilai bobot-bobotnya dalam arah mundur (backward). Untuk mendapatkan error ini, tahap perambatan maju (forwardpropagation) harus dikerjakan terlebih dahulu.
Syarat fungsi aktivasi dalam BPNN adalah bersifat kontinu, terdiferensial dengan mudah, dan merupakan fungsi yang tidak turun. Fungsi aktivasi yang dapat memenuhi ketiga syarat tersebut adalah logsig, tansig, dan purelin.
14
merupakan suatu peta karakter yang menunjukkan lokasi dari vektor masukan, sedangkan metode pelatihan merupakan proses latihan mengenali data dan menyimpan pengetahuan atau informasi yang didapat pada bobot-bobot (Heaton, 2003).
Dalam pelatihan BPNN Terdapat 3 fase, yaitu fase maju (feed forward), fase mundur (back propagation), dan fase modifikasi bobot. Dalam fase feed forward, pola masukan dihitung maju dimulai dari lapisan input hingga lapisan output. Dalam fase backpropagation, tiap-tiap unit output menerima target pola yang berhubungan dengan pola input untuk dihitung nilai kesalahan. Kesalahan tersebut akan dipropagasikan mundur, sedangkan fase modifikasi bobot bertujuan untuk menurunkan kesalahan yang terjadi. Ketiga fase tersebut diulang secara terus menerus hingga kondisi penghentian dipenuhi.
2.8.
Kontroler PID (
Proportional
-
Integral-Derivative
) [7]
Kontroler PID (Proportional–Integral–Derivative Controller) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem. Kontroler PID adalah kontroler konvensional yang banyak dipakai dalam dunia industri. Kontroler PID akan memberikan aksi kontrol kepada plant berdasarkan besar kesalahan yang diperoleh. Kesalahan adalah perbedaan dari setpoint dengan output sistem pengaturan.
Ilustrasi rancangan kontroler Proportional, Integral, Derivative (PID) yang digunakan pada plant motor BLDC dapat dilihat pada Gambar 2.7.
Adapun persamaan Kontroler PID adalah:
𝑚𝑚𝑚𝑚(𝑡𝑡) =𝐾𝐾𝑃𝑃�𝑒𝑒(𝑡𝑡) +1
15 mv(t) : manipulated variable
Kp : konstanta proportional Ti : timeintegral
Td : timederivative e(t) : eror
Komponen kontrol PID ini terdiri dari tiga jenis yaitu proportional, integral dan derivative. Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri tergantung dari respon yang kita inginkan terhadap suatu plant. Efek dari setiap pengontrol Proportional, Integral dan Derivative pada sistem loop tertutup disimpulkan pada Tabel 2.2.
Tabel 2.2 Karakteristik Kontroler Proportional, Integral, dan Derivative
Respon
Close-Loop Rise Time Overshoot Setting Time
Steady State Errror
Proportional Turun Naik Perubahan
Kecil Turun
Integral Turun Naik Naik Hilang
Derivative Perubahan
Kecil Turun Turun
16
17
BAB 3
PERANCANGAN SISTEM
Bab ini menjelaskan segala hal terkait perancangan perangkat keras, dan perangkat lunak yang akan digunakan, serta perancangan kontroler menggunakan metode Neural Network-PID.
3.1.
Gambaran Umum Sistem
Plant motor BLDC ini dibuat secara berkelompok yang terdiri dari Guntur Sadhiea Putra, Muhammad Safrurriza, Fairuzza Dinansyar, Muhammad Iqbal Fauzi, Irwan Eko Prabowo. Komponen penggerak utama yang menjadi objek Tugas Akhir yang dirangkai adalah BLDC Motor. Selain itu, sistem pada plant motor BLDC ini juga menggunakan rem elektromagnetik, yang berfungsi sebagai beban kinerja Motor DC Brushless.
Sistem yang dibahas pada Tugas Akhir ini terdiri dari beberapa komponen yang dirangkai membentuk suatu plant motor BLDCterpadu untuk menjalankan objektif tertentu sesuai dengan tujuan dilaksanakan Tugas Akhir ini.
Untuk mendukung kinerja plant motor BLDCtersebut dibutuhkan komponen pendukung lain berupa sub sistem yang mendukung kerja dan fungsi masing-masing perangkat yang telah disebutkan sebelumnya. Perangkat pendukung tersebut antara lain driver motor BLDC yang digunakan untuk mengatur kecepatan, rangkaian isolasi dan juga rangkaian pengatur PWM (Pulse Width Modulation) pada rem yang digunakan untuk mengatur besarnya sinyal kontrol yang diberikan pada rem guna membantu besarnya pembebanan.
Pengaturan kecepatan motor BLDC yang sekaligus sebagai objek kontrol utama Tugas Akhir ini menggunakan metode kontrol Neural Network (NN) – Proportional, Integral, Derivative (PID). Penggunaan metode kontrol ini diharapkan dapat membantu meningkatkan performa motor untuk menghasilkan respon performansi yang diinginkan.
3.2.
Perancangan Perangkat Keras
18 3.2.1. Perancangan Mekanik
Sistem plant motor BLDC terdiri dari beberapa komponen yang bekerja sama. Komponen pendukung tersebut antara lain motor BLDC sebagai penggerak utama yang sekaligus menjadi objek kontrol utama dalam pelaksanaan Tugas Akhir ini. Selanjutnya terdapat komponen yang berfungsi untuk memberikan efek pembebanan pada motor, yaitu rem elektromagnetik. Rem elektromagnetik tersebut dirancang untuk memberikan efek pembebanan pada piringan yang dihubungkan dengan poros yang digerakkan langsung oleh motor BLDC. Untuk rancangan selengkapnya akan dijelaskan pada sub bab berikutnya.
3.2.1.1. Motor DC Brushless
Motor BLDC dipilih karena memiliki beberapa keunggulan bila dibandingkan dengan motor listrik yang lain. Beberapa karakteristik yang menjadi pertimbangan memilih motor BLDC antara lain dapat menggerakkan dengan daya yang besar, suaranya halus, ukuran kompak, torsi besar, efisiensi tinggi, memiliki umur pakai yang panjang (keandalan yang tinggi), mudah dikontrol, dan perawatan yang rendah.
Umumnya kecepatan motor dan torsi motor BLDC ini bergantung pada kekuatan medan magnet yang dihasilkan oleh kumparan motor yang bergantung terhadap suplai arus. Oleh sebab itu, kecepatan motor BLDC diatur dengan mengatur tegangan dan arus yang ada pada tegangan. Berdasarkan kondisi tersebut, maka metode pengaturan yang digunakan dalam kasus ini membutuhkan metode pengaturan yang memiliki respon cepat.
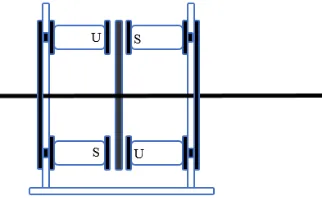
19 3.2.1.2. Rem Elektromagnetik
Untuk menghasilkan efek pembebanan pada plant motor BLDC digunakan bantuan alat berupa rem elektromagnetik. Rem elektromagnetik yang digunakan pada plant BLDC ini dibuat sedemikian rupa agar dapat diatur kekuatan medan magnetnya yang berasal dari efek arus Eddy dengan mengatur besar tegangan input yang masuk pada kumparan.
Efek pengereman dihasilkan oleh efek torsi yang berlawanan arah hasil dari induksi medan magnet yang terbentuk akibat aliran arus listrik yang mengalir pada kumparan rem. Sumber tegangan yang digunakan rem elektromagnetik didapat dari tegangan jala-jala PLN yang kemudian diturunkan menggunakan trafo step down dan disearahkan menggunakan rangkaian penyearah gelombang penuh. Pengaturan arus DC input berupa PWM (Pulse Width Modulation) yang dialirkan ke rem elektromagnetik dikontrol menggunakan rangkaian pengatur duty cycle yang diatur menggunakan sebuah driver dengan menggunakan Arduino uno.
Rem elektromagnetik pada plant motor BLDC ini tersusun dari delapan buah kumparan rem yang terhubung secara seri dan terbuat dari inti besi yang dililit dengan kawat tembaga. Delapan kumparan ini terpisah menjadi dua bagian dan diberikan celah untuk ditempatkan sebuah piringan beban yang berbahan nonferromagnetic dan terhubung dengan poros yang digerakkan langsung oleh motor BLDC. Konstruksi rem terdiri dari 4 kumparan pada tiap sisinya dengan masukan tegangan DC yang diberikan pada tiap sisi sebesar 16 V, 20 V, dan 24 V. Spesifikasi rem elektromagnetik dapat dilihat pada Tabel 3.1.
20 Tabel 3.1 Spesifikasi Rem Elektromagnetik
Jumlah Kumparan 8 (masing –masing 400 kumparan) Resistansi Kumparan (Seri) 12 Ω
Diameter Kumparan 3 cm
Diameter Kawat 0,6 mm
Tegangan Kerja 0-30 V
Arus Maksimal 3 A
Ilustrasi penampang rem elektromagnetik yang digunakan pada plant motor BLDC dapat dilihat pada Gambar 3.2.
3.2.2. Perancangan Elektronik
Perancangan elektronik pada plant motor BLDCmeliputi rangkaian elektronik menggunakan PCB serta pengkabelan pada plant motor BLDC. Rangkaian elektronik pada plant motor BLDC terdiri dari beberapa rangkaian, yaitu rangkaian driver motor BLDC, dan rangkaian driver rem elektromagnetik.
3.2.2.1. Rangkaian Driver Motor BLDC
Rangkaian driver motor BLDC merupakan hal paling utama untuk dapat menggerakkan motor. Tanpa driver, motor BLDC tidak dapat bekerja sesuai dengan keinginan. Pada plant motor BLDC P-1ini driver yang digunakan untuk menggerakan motor BLDC ialah sebuah driver elektronik yang sudah terintegrasi menjadi modul dan banyak digunakan untuk AC Inverter. Dalam Tugas Akhir ini yang digunakan adalah motor BLDC AC Inverter Daikin.
21
3.2.2.2. Rangkaian Driver Rem Elektromagnetik
Pada Tugas Akhir ini akan diberlakukan tiga kondisi pembebanan yaitu kondisi beban minimal, nominal dan maksimal. Efek pembebanan tersebut didapat dari efek yang dihasilkan oleh rem elektromagnetik. Untuk mengatur besar kecilnya intensitas kekuatan magnet yang akan digunakan, maka dibutuhkan suatu rangkaian elektronik yang dapat mengaturnya. Dalam hal ini pengaturan yang dilakukan ialah dengan mengatur arus masukan yang digunakan untuk menyuplai kumparan elektromagnetiknya.
Berdasarkan hukum Ohm, tegangan akan berbanding lurus dengan arus. Pada kasus ini pengaturan arus masukan dilakukan dengan mengatur tegangan yang masuk dengan menggunakan teknik PWM (Pulse Width Modulation).
Rem elektromagnetik sangat berperan penting dalam keselurahan sistem ini. Rem digunakan untuk memberikan pembebanan pada motor BLDC. Untuk mengatur nilai pembebanan yang akan diberikan kepada motor BLDC, dibutuhkan suatu rangkaian yang digunakan untuk mengatur besaran arus DC yang masuk ke dalam kumparan. Oleh karena itu, dibuatlah suatu driver yang digunakan untuk mengatur arus yang masuk ke dalam kumparan. Arus ini berupa arus DC yang telah disearahkan oleh rangkaian penyearah. Pengaturan arus yang masuk ke dalam kumparan tersebut dilakukan menggunakan teknik PWM atau Pulse Width Modulation. Dengan teknik PWM ini tegangan dan arus yang ingin digunakan akan dapat diatur sesuai keinginan.
3.3.1. Mikrokontroler Arduino
Untuk menghubungkan komunikasi antara instrumen berupa sensor maupun aktuator serta rangkaian pada sistem dengan program yang diatur melalui komputer dibutuhkan suatu interface atau penghubung. Pada Tugas Akhir ini digunakan sebuah mikrokontroler sebagai penghubung.
Arduino Uno Rev3 ini memiliki total 14 pin input/output yang terdiri dari 6 pin sebagai output PWM, 6 pin sebagai analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tombol reset.
3.3.
Perancangan Perangkat Lunak
22
MATLAB. Arduino digunakan sebagai alat akuisisi data, sedangkan MATLAB digunakan untuk membaca nilai dari sensor untuk keperluan identifikasi sistem dan mengirimkan sinyal kontrol pada Arduino. Selain itu, MATLAB digunakan pula sebagai software untuk desain, simulasi dan implementasi kontroler.
3.3.1. Software Arduino
Proses yang dilakukan Arduino Uno Rev3 dalam melakukan akuisisi dan pengaturan antara instrumen pada sistem dengan komputer memerlukan program yang harus di compile terlebih dahulu ke dalam mikrokontroler Arduino Uno Rev 3. Untuk melakukan proses pemrograman dan compile pada arduino menggunakan software Arduino IDE. Langkah untuk memrogram Arduio Uno Rev3 sendiri dapat dilakukan dengan menghubungkan Arduino Uno Rev3 tersebut ke komputer dengan menggunakan kabel USB. Pada tampilan software Arduino IDE harus disesuaikan terlebih dahulu port mana yang akan digunakan serta pemilihan jenis Arduino yang digunakan.
23 3.3.2. Software MATLAB
Perangkat lunak lain yang digunakan dalam Tugas akhir ini ialah software MATLAB. Pada Tugas Akhir ini software MATLAB yang digunakan ialah MATLAB 2013a yang merupakan versi MATLAB keluaran tahun 2013.
Proses yang dilakukan dengan software MATLAB ini ialah proses komunikasi antar device yakni komputer dengan insrumen pada plant BLDCpengiriman berupa sensor, aktuator dan lainnya. Komunikasi yang dimaksud di sini adalah proses pengiriman dan penerimaan data dengan memanfaatkan komunikasi serial yang ada pada Arduino. Selanjutnya Simulink pada MATLAB dapat mengolah data dari blok serial receive dan mengirimkannya kembali melalui blok serial send.
3.4.
Identifikasi dan Pemodelan Sistem
24
berupa model matematika sebagai representasi karakteristik dari perilaku sistem. Metode identifikasi pemodelan sistem yang digunakan pada Tugas Akhir ini dilakukan secara dinamis dengan cara memberikan masukan berupa sinyal acak atau biasa disebut sinyal PRBS (Pseudo Random Binary Sequence). Sinyal tersebut akan dimasukkan sebagai sinyal referensi untuk menggerakkan motor BLDC untuk kemudian dilakukan pengidentifikasian dari hasil output yang dihasilkan motor BLDC dengan menggunakan metode identifikasi ARX (Auto Regressive with eXogenous) yang sudah ada pada software MATLAB.
Dalam melakukan identifikasi menggunakan System Identification Toolbox, data input-output yang telah didapatkan dimasukkan ke dalam aplikasi dengan memilih “time domain data” saat meng-klik popout bertuliskan “import data”. Setelah itu, dilakukan preprocessing. Proses yang di pilih pada tahap ini adalah pembuangan nilai rata-rata atau dengan kata lain mengurangi seluruh nilai input dan output dengan rata-ratanya. Hal ini dapat dilakukan dengan memilih “remove means” setelah meng-klik popout bertuliskan “preprocess”. Data yang telah melalui tahap preprocess kemudian dipilih sebagai working data sekaligus validation data dengan cara drag-and-drop kotak yang berisi data tersebut ke kotak working data dan validation data. Kemudian dilakukan identifikasi model dengan memilih “transfer function” setelah meng-klik popout bertuliskan “estimate”. Fungsi transfer hasil identifikasi dibatasi hanya berupa fungsi transfer orde dua tanpa zero. Hasil identifikasi dapat dilihat pada Tabel 3.2.
Tabel 3.2 Identifikasi Sistem
Beban Tegangan input
beban
Maksimal 24 V 232,7394
𝑠𝑠2+ 49,9617𝑠𝑠+ 273,8755
3.5.
Perancangan Kontroler
Neural Network
-PID
25
kontroler ini meliputi perancangan learning pada kontroler NN-PID dan perancangan kontroler NN.
Pada Tugas Akhir ini pengaturan kecepatan motor BLDC akan menggunakan metode kontrol berbasis NN-PID. Kontroler NN-PID yang digunakan menggunakan invers model sebagai target output sinyal kontrol yang ingin dicapai. Struktur Neural Network dapat dilihat pada Gambar 3.4, dan diagram Blok Simulink Neural Network-PID dapat dilihat pada Gambar 3.5.
3.5.1. Perancangan Kontroler NeuralNetwork
Setelah melalui proses learning, neural network memiliki nilai bobot yang optimal. Selanjutnya, kontroler bekerja secara Feed-Forward Controller yang dibuat menggunakan 4 node pada layerinput dan 1 node pada layer output. Pada struktur Neural Network yang dirancang tidak menggunakan hidden layer (Single Layered Neural Network). Struktur ini sendiri dibuat dengan harapan agar kontroler NeuralNetwork yang dibuat dapat bekerja menyerupai kerja kontroler PID Diskrit.
3.5.2. Perancangan Learning pada Kontroler Neural Network Sebelum merancang kontroler Neural Network diperlukan penyesuaian nilai bobot untuk kontroler NN. Dengan merancang learning ini maka akan didapatkan nilai bobot yang sesuai untuk output yang diharapkan dari kontroler Neural Network.
Pada tahap ini dibuat rancangan learning pada kontroler Neural Network-PID. Tipe learning yang digunakan termasuk ke dalam tipe reinforcedlearning. Artinya, algoritma pembelajaran dari mappinginput -output secara terus-menerus berinteraksi dengan lingkungan, di mana hal
∑
f
26
ini dapat memberikan pengaruh dari setiap langkah yang diambil akan memberikan feedback kepada model. Dengan supervised learning ini, proses learning pada plant dapat disesuaikan dengan kebutuhan user.
Pada proses perancangan learning Neural Network dengan memberikan setpoint berupa nilai Kp, Ki, dan Kd untuk setiap pembebanan
serta dalam proses learning memberikan nilai Kp, Ki, dan Kd random
sehingga dengan metode learning ini ditemukan nilai bobot yang tepat untuk masing-masing Kp, Ki, dan Kd pada setiap pembebanan. Script yang
digunakan dapat dilihat pada Lampiran 1. Pada tahap ini dibuat rancangan learning pada kontroler NeuralNetwork dengan menggunakan PID. Tipe learning yang digunakan termasuk ke dalam tipe reinforced learning. Artinya, Algoritma pembelajaran dari mapping input-output secara terus menerus berinteraksi dengan lingkungan, di mana hal ini dapat memberikan pengaruh dari setiap langkah yang diambil, memberikan feedback kepada model. Dengan reinforced learning ini, proses learning pada plant dapat disesuaikan dengan kebutuhan user. Selain itu dengan menggunakan algoritma, nilai optimal dapat diperoleh dengan waktu yang lebih singkat.
27
Nilai bobot dari masing-masing Kp, Ki, Kd untuk setiap pembebanan
dapat dilihat pada Tabel 3.3.
Tabel 3.3 Bobot Setiap Pembebanan
Bobot Beban
28
29
BAB 4
PENGUJIAN DAN ANALISA
4.1.
Gambaran Umum Pengujian Sistem
Pengujian sistem dimaksudkan untuk mengetahui performansi sistem dari plant motor BLDC terhadap adanya beban tambahan dengan menggunakan rem elektromagnetik. Pengujian sistem dengan dua cara, yaitu simulasi dan implementasi.
Simulasi dilakukan dengan bantuan program simulink yang ada pada software MATLAB. Simulasi dilakukan pada semua kondisi beban yakni kondisi tanpa beban, kondisi beban nominal, serta kondisi beban maksimal untuk melihat bagaimana pengaruh kontroler Neural Network yang telah dirancang.
Setelah dilakukan pengujian berupa simulasi kemudian dilakukan pengujian dengan melakukan implementasi kontroler yang telah dirancang terhadap plant motor BLDC yang telah dibuat untuk melihat pengaruh kontroler secara langsung untuk kemudian dilakukan analisa dan perbandingan antara hasil simulasi dan implementasi yang dijalankan.
4.2.
Pengujian Perangkat Keras
Pada Tugas Akhir ini, pengujian perangkat keras dilakukan untuk mengetahui apakah perangkat keras yang digunakan bekerja dan berfungsi pada sistem secara semestinya atau tidak. Pengujian perangkat keras terdiri dari dua buah pengujian, yaitu pengujian open loop, dan pengujian rem elektromagnetik
4.2.1. Pengujian Open Loop Kecepatan Motor
30 4.2.2. Pengujian Rem Elektromagnetik
Pada Tugas Akhir ini, rem elektromagnetik berfungsi sebagai pemberi efek pembebanan yang dirancang sedemikian rupa sehingga besar kecilnya pembebanan dapat diatur sesuai dengan kondisi pembebanan yang diinginkan. Pengujian ini dilakukan dengan tujuan untuk mengetahui secara langsung bagaimana pengaruh sinyal PWM terhadap besarnya arus DC yang diberikan pada rem elektromagnetik. Pada pengujian ini, pengukuran dilakukan dengan menggunakan amperemeter. Hubungan besarnya PWM dengan arus DC yang dihasilkan tergantung pada kondisi pembebanan.
4.3.
Simulasi Sistem
Simulasi sistem dilakukan dengan menggunakan program Simulink yang terdapat pada program MATLAB 2013. Merancang kontroler Neural Network (NN) pada diagram Simulink MATLAB.
4.3.1 Simulasi dengan Menggunakan Kontroler Neural-Network
Proses kontrol yang ada pada kontroler ini terbagi menjadi dua tahap, yakni proses learning dan proses simulasi. Pada proses learning, struktur Neural Network akan bekerja untuk meminimalisir error yang ada dengan cara melakukan perbaikan bobot yang ada pada struktur tersebut. Operasi yang dilakukan oleh kontroler Neural Network bekerja dalam dua tahapan yakni forward propagation dan Reinforced Learning. Forward propagation merupakan proses maju ke depan melalui struktur jaringan dengan hasil akhir sebuah sinyal kontrol. Di akhir operasi, sinyal kontrol tersebut akan dibandingkan dengan target output sinyal kontrol yang telah ditentukan sebelumnya. Ketika target output sinyal kontrol belum sesuai dengan output yang diinginkan, maka sistem akan melakukan perbaikan bobot untuk meminimalisir error yang ada.
4.3.2 Proses Learning Kontroler Neural-Network
31
yang dilakukan semakin ditingkatkan, maka proses learning yang berlangsung akan semakin lama.
Setelah proses learning selesai, kemudian dilanjutkan dengan proses penggunaan nilai bobot yang telah didapat ke dalam simulasi plant BLDC untuk mendapatkan hasil respon output dari plant BLDC.
4.3.3 Proses Simulasi Kontroler
Dari hasil learning yang dilakukan sebelumnya didapat nilai bobot yang berasal dari nilai bobot error yang terkecil. Nilai bobot tersebut digunakan untuk menjalankan kontroler Neural Network.
4.3.4 Pengujian Simulasi Respon dengan Kontroler
Pada tahapan ini kontroler yang telah dibuat akan dicoba dijalankan pada model hasil identifikasi sistem. Pengujian ini dilakukan dengan memberikan respon step pada semua kondisi pembebanan, mulai dari kondisi tanpa beban (rem 0%) sampai dengan kondisi beban maksimal. Setelah itu respon dianalisa untuk dicari nilai rise time, settlingtime, dan error steady state. Pengujian dilakukan dengan memberikan sinyal step pada semua fungsi alih pada setiap pembebanan.
Setelah dilakukan simulasi, maka dilakukan analisa terhadap respon hasil dari kontroler. Selanjutnya adalah menghitung settling time, rise time dan error steady state.
Perhitungan nilai settling time dilakukan dengan cara menghitung nilai respon output yang berada pada ±5% atau ±2% atau ±0,5% dari nilai steady state respon, sedangkan pada penghitungan rise time yang perlu dilakukan adalah menghitung waktu yang dibutuhkan oleh respon dari mulai 10% dari nilai steadystate hingga ke 90% dari nilai steadystate.
4.4.
Realisasi
Plant
Sistem Motor BLDC
Secara garis besar, plant sistem motor BLDC ini terdiri dari beberapa komponen inti, di antaranya motor BLDC, rem elektromagnetik, serta rangkaian elektronik pendukung seperti driver rem elektromagnetik, rangkaian sinyal conditioning, dan Arduino Uno sebagai interface serta sebagai penghubung antara plant motor BLDC dengan komputer. Dimensi fisik dari plant motor BLDC ini sekitar 60 x 30 x 20 cm. Hasil akhir realisasi plant motor BLDCdapat dilihat pada Gambar 4.1.
32
(AC/Pendingin Ruangan). Motor BLDC tersebut merupakan hasil pabrikan dari produsen pendingin ruangan, yaitu Daikin D43F. Motor jenis ini memiliki karakteristik dengan tipe inrunner. Memiliki tegangan nominal 307 VDC, dengan kecepatan tanpa beban maksimal pada kisaran 1282 rpm.
Dilihat dari struktur fisik motor yang cukup lebar, biasanya motor jenis ini memiliki kecepatan putar yang cukup rendah, namun memiliki torsi yang besar. Pada Gambar 4.1 dapat dilihat tampilan realisasi plant motor BLDC yang dibuat. Beberapa komponen yang digunakan, yaitu motor BLDC, piringan alumunium, kumparan rem, supply rem, rangkaian isolasi, board daikin.
4.4.1. Pengujian Respon Implementasi Kontroler Neural Network
Sebelum melakukan tahap implementasi, terlebih dahulu dilakukan penentuan parameter yang akan digunakan pada kontroler Neural Network.
33
Setelah parameter ditentukan, selanjutnya sistem dijalankan dengan menggunakan kontroler Neural Network yang sebelumnya telah melalui proses learning dan kemudian di analisa hasil respon yang didapat pada semua kondisi pembebanan.
Hasil respon yang tidak stabil tersebut dapat disebabkan oleh beberapa faktor. Faktor pertama adalah adanya masalah pada pemodelan. Seperti yang telah dijelaskan pada sub bab sebelumnya terkait pemodelan motor BLDC, disana terdapat nilai RMSE yang cukup besar pada fungsi alih hasil pemodelan masing-masing orde pada tiap kondisi pembebanan. Hal ini juga dapat mempengaruhi kondisi kontroler Neural Network yang sebelumnya melalui tahap learning dengan menggunakan fungsi alih hasil pemodelan tersebut, sehingga ketika proses implementasi dilakukan terdapat ketidaksesuaian nilai bobot yang dapat menyebabkan terjadinya error steady state.
Faktor selanjutnya yang mungkin ialah adanya gangguan teknis pada pengiriman dan penerimaan data (data loss) yang terjadi antara komputer dengan plant BLDC.Dataloss ini mengganggu sinyal kontrol yang dikirimkan oleh komputer ke plant motor BLDC P-1karena data yang dikirimkan akan hilang untuk beberapa saat. Sehingga PWM yang dihasilkan oleh driver ke motor BLDC tidak sesuai dengan apa yang diinginkan. Faktor yang dapat menyebabkan terjadinya data loss ini dapat berasal dari gangguan teknis berupa gangguan proses yang dihasilkan traffic data karena ada program lain yang juga sedang bekerja sehingga mempengaruhi performa komputer dalam memproses data.
4.4.2. Respon pada Semua Kondisi Pembebanan
Pada sub bab ini akan dipaparkan karakteristik dari respon hasil implementasi kontroler Neural Network-PIDpada semua kondisi.
4.4.2.1. Kondisi Beban Minimal
34
4.4.2.2. Kondisi Beban Nominal
Selanjutnya tahap implementasi dilanjutkan untuk kondisi pembebanan nominal. Sebelum dilakukan implementasi, terlebih dahulu dilakukan proses learning dengan menggunakan fungsi alih hasil pemodelan pada kondisi beban nominal orde 1. Pemilihan orde ini berdasarkan pada nilai RMSE yang dihasilkan tiap orde. Fungsi alih orde 1 diperoleh pada tiap kondisi pembebanan sebagai fungsi alih dengan nilai RMSE yang paling kecil atau dengan kata lain paling mendekati hasil yang sebenarnya jika dibandingkan dengan fungsi alih orde lain.
4.4.2.3. Kondisi Beban Maksimal
Pada tahap implementasi kondisi ini, beban pengereman diatur pada kondisi beban maksimal. Selanjutnya dilakukan proses dilakukan proses learning dengan menggunakan fungsi alih hasil pemodelan pada kondisi beban maksimal orde 1. Setelah proses learning pada kondisi ini selesai dilanjutkan dengan implemntasi dengan memberikan kecepatan referensi sama seperti pada kondisi pembebanan sebelumnya. Kemudian didapatkan hasil respon dan dilakukan analisa terhadap karakteristik yang ada pada kondisi beban maksimal.
4.5.
Hasil Simulasi
Simulasi dilakukan dengan mengubah-ubah nilai beban yang masuk pada plant. Dari simulasi yang dilakukan, maka didapatkan bentuk respon seperti pada Gambar 4.2, Gambar 4.3, dan Gambar 4.4.
35 Gambar 4.2 Respon Plant Beban Minimal
36
Dapat dilihat dari ketiga gambar, Gambar 4.2, Gambar 4.3, dan Gambar 4.4 di atas bahwa pada saat diberikan beban minimal, nominal, dan maksimal pada plant, maka respon yang dihasilkan dapat rise time setelah 6,1 detik. Steady state time yang diperlukan sebesar 6,3 detik.
4.6.
Implementasi
Pada kondisi awal, motor diberikan beban nominal (20VDC). Pada saat t=40 detik beban diganti menjadi beban maksimal (24VDC). Pada Gambar 4.5 dapat dilihat bahwa ketika diberikan beban nominal maka kecepatan akan steady pada waktu 24 detik, lalu beban diubah menjadi beban maksimal ketika 40 detik dan membuat kecepatan turun, lalu setelah beberapa saat akan steady kembali. Setelah steady maka beban diubah menjadi beban minimal, sehingga kecepatan naik setelah beberapa saat, maka kecepatan akan steady kembali.
37
BAB 5
PENUTUP
5.1.
Kesimpulan
Dari hasil respon plant pada pembebanan beban minimal, nominal, dan maksimal, maka dapat disimpulkan bahwa motor dapat mempertahankan kecepatan.
Dari hasil tuning kontroler PID menggunakan Neural Network didapatkan parameter paling optimal sebagai berikut, Kp = 0,238, Ki =
1,148, Kd = 0,013. Risetime untuk beban minimal sebesar 6,1 detik, beban
nominal sebesar 6,11 detik, dan beban maksimal sebesar 6,15 detik. Steadystatetime untuk ketiga beban sebesar 6,3 detik.
Ketika dilakukan perubahan pembebanan pada saat implementasi, kecepatan pada plant dapat berada pada steady state.
5.2.
Saran
Apabila ada yang ingin menggunakan plant motor BLDC ini untuk dilakukan penelitian lebih lanjut atau menggunakan kontroler Neural-Network, ada beberapa hal yang dapat dijadikan pertimbangan, yaitu:
38
39
DAFTAR PUSTAKA
[1] Xia, Chang Liang., Permanent Magnet Brushless DC Motor Drives and Controls, John Wiley & Sons Singapore Pte. Ltd., Singapore, 2012
[2] R. Shemanske, "Electronic Motor Braking," IEEE Trans. On Industry, vol. IA, no. 19, pp. 824-831, 1983.
[3] ..., “Arduino”, <URL: http://arduino.cc/>, Desember, 2015. [4] Ljung, Lenart dan Torkel, Glad, “Modelling of Dynamic Systems”,
Prentice – Hall International: New Jersey. 1994.
[5] Elrosa, Ilmiyah, “Traction Control pada Parallel Hybrid Electric Vehicle dengan Metode Generalized Predictive Control”, Tugas Akhir, Jurusan Teknik Elektro ITS Surabaya, 2014.
[6] Gerard Dreyfus, Neural Networks, Methodology and Applications. Springer, 2005.
[7] Permana, Putra Eka, “PID (Proportional-Integral-Derivative)
Controller”, <URL:
40
41
LAMPIRAN
1. Program Bobot Kp function kpn = kpjst(xx)
zkp=wkp(1)*L+wkp(2)*L^2+wkp(3)*L^3+wkp(4)*1; kpn=lmd*zkp;
ekp=Kp-kpn;
42 for eppoh=1:10
zki=wki(1)*L+wki(2)*L^2+wki(3)*1; kin=lmd*zki;
eki=Ki-kin;
wki(1)=wki(1)+alp*eki*lmd*L; wki(2)=wki(2)+alp*eki*lmd*L^2; wki(3)=wki(3)+alp*eki*lmd*1; assignin('base','wki',wki); end
end
3. Program Bobot Kd function kdn = kdjst(xx)
zkd=wkd(1)*L+wkd(2)*L^2+wkd(3)*1; kdn=lmd*zkd;
ekd=Kd-kdn;
wkd(1)=wkd(1)+alp*ekd*lmd*L; wkd(2)=wkd(2)+alp*ekd*lmd*L^2; wkd(3)=wkd(3)+alp*ekd*lmd*1; assignin('base','wkd',wkd); end
end
43
RIWAYAT HIDUP
44
![Gambar 2.1 Pergerakan Eksitasi Fase Fluks pada Motor BLDC [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/25.420.58.346.313.425/gambar-pergerakan-eksitasi-fase-fluks-pada-motor-bldc.webp)
![Gambar 2.2 Tampilan Arus Eddy [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/26.420.101.336.245.384/gambar-tampilan-arus-eddy.webp)
![Gambar 2.3 Tampilan Rem Elektromagnetik. [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/27.420.56.349.364.481/gambar-tampilan-rem-elektromagnetik.webp)
![Gambar 2.4 Tampilan Arduino Uno [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/28.420.129.302.289.409/gambar-tampilan-arduino-uno.webp)
![Gambar 2.5 Sinyal Uji Pseudo-Random Binary Square (PRBS) [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/30.420.88.344.73.229/gambar-sinyal-uji-pseudo-random-binary-square-prbs.webp)
![Gambar 2.6 Struktur Neural Network [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/32.420.73.333.141.330/gambar-struktur-neural-network.webp)
![Gambar 2.7 Struktur Kontroler PID [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1817202.2100593/33.420.93.309.365.438/gambar-struktur-kontroler-pid.webp)