TINJAUAN PUSTAKA
Hujan dan Curah Hujan
Hujan adalah jatuhnya hydrometeor yang berupa partikel-partikel air dengan diameter 0.5 mm atau lebih. Hujan juga dapat didefinisikan dengan uap yang mengkondensasi dan jatuh ke tanah dalam rangkaian proses hidrologi. Menurut Tjasjono (1992) hujan merupakan salah satu bentuk presipitasi uap air yang berasal dari awan yang terdapat di atmosfer. Bentuk presipitasi lainnya adalah salju dan es.
Curah hujan merupakan ketinggian air hujan yang terkumpul dalam tempat yang datar, tidak menguap, tidak meresap, dan tidak mengalir. Curah hujan juga didefinisikan sebagai tinggi air (mm) yang diterima permukaan sebelum mengalami aliran permukaan, evaporasi dan peresapan ke dalam tanah (Handoko 1993).
Satuan curah hujan adalah millimeter (mm). Curah hujan 1 mm artinya dalam luasan satu meter persegi pada tempat yang datar tertampung air setinggi satu milimeter atau tertampung air sebanyak satu liter. Alat yang digunakan untuk mengukur curah hujan adalah ombrometer. Di stasiun Klimatologi Darmaga Bogor, alat yang digunakan untuk mengukur curah hujan adalah penakar hujan tipe observasi.
Kelembaban Udara
Kelembaban udara adalah jumlah uap air di udara (atmosfer) pada saat dan tempat tertentu (Tjasjono 1992). Alat untuk mengukur kelembaban udara disebut psychrometer atau hygrometer. Kelembaban udara dinyatakan dalam satuan persen (%).
Temperatur Udara
Temperatur udara adalah keadaan panas atau dinginnya udara (Tjasjono 1992). Alat untuk mengukur suhu udara atau derajat panas disebut thermometer. Suhu memiliki satuan pengukuran derajat celcius (0C).
Tekanan Udara
Tekanan udara adalah suatu gaya yang timbul akibat adanya berat dari lapisan udara (Tjasjono 1992). Besarnya tekanan udara di setiap tempat pada suatu saat berubah-ubah. Semakin tinggi suatu tempat dari permukaan laut, semakin rendah tekanan udaranya. Hal ini disebabkan karena semakin berkurangnya udara yang menekan. Besarnya tekanan udara diukur dengan barometer dan dinyatakan dengan milibar (mb). 1.013 milibar = 76 cm Hg = 1 atm.
Angin
Angin adalah udara yang bergerak akibat adanya perbedaan tekanan udara. Angin bergerak dari tempat yang memiliki tekanan tinggi ke tempat yang bertekanan rendah. Angin merupakan besaran vektor yaitu besaran yang memiliki arah dan panjang/besar. Arah menyatakan arah angin darimana angin tersebut datang atau disebut wind direction. Sedangkan besar angin menyatakan kecepatan angin atau disebut wind speed. Alat untuk mengukur arah dan kecepatan angin adalah anemometer. Kecepatan angin memiliki satuan knot. 1 knot = 1,85 km/jam.
Angin diberi nama sesuai dengan arah darimana angin datang. Misalnya angin timur yaitu angin yang datang dari arah timur. Angin laut adalah angin yang yang bertiup dari laut ke darat, angin lembah adalah angin yang datang dari lembah menaiki pegunungan. Secara klimatologis arah angin diamati dari 8 arah sebagai berikut :
Utara : 00 = 3600 Selatan : 1800
Timur laut : 450 Barat daya : 2250
Timur : 900 Barat : 2700
Tenggara : 1350 Barat laut : 3150
Data Sirkular (Circular Data).
Data sirkular (circular data) adalah data hasil pengukuran bersatuan arah dan waktu (Mardia & Peter 1972). Data sirkular juga didefinisikan sebagai data yang dapat direpresentasikan pada keliling lingkaran berjari-jari satu satuan
dengan titik asal sama dengan titik akhir (00 = 3600). Titik-titik pada lingkaran menyatakan ukuran arah/vektor satuan.
Jenis-jenis Data Sirkular
Alat untuk mengukur data sirkular adalah kompas (pengukur arah) dan jam (pengukur waktu). Berdasarkan hal tersebut maka data sirkular dibedakan menjadi (Mardia & Peter 1972):
1. Data sirkular bersatuan arah, yaitu data yang diperoleh dari pengukuran suatu hal dengan respon pengukuran tersebut adalah derajat atau arah.
2. Data sirkular bersatuan waktu, yaitu data sirkular yang diperoleh dari pengukuran suatu hal dengan respon adalah waktu (jam, hari, minggu, bulan atau tahun).
Representasi Grafis Data Sirkular
Data sirkular digambarkan dalam bentuk titik-titik pada keliling suatu lingkaran dengan jari-jari satu satuan. Representasi numerik tidak unik karena tergantung pada pilihan arah nol dan arah putaran (berlawanan atau searah jarum jam). Sebagai contoh dapat dilihat pada Gambar 1. Sudut A adalah 300 jika letak sudut nol ada di arah utara dan arah rotasi searah jarum jam, tetapi jika sudut nol diambil dari arah timur dan arah rotasi berlawanan jarum jam maka sudut A adalah 600. utara 300 600 timur
Gambar 1 Representasi data sirkular
Menurut Fisher (2000) data sirkular dapat direpresentasikan secara grafis ke dalam beberapa bentuk diantaranya row data plot, histogram (tipe linier dan sirkular) dan diagram mawar (rose diagram).
1. Row data plot
Dalam row data plot, data sirkular tersebar dalam sebuah lingkaran sederhana. Setiap unit pengamatan mewakili letaknya masing-masing dan tidak mewakili suatu interval pengelompokkan tertentu.
2. Histogram a. Linier
Representasi grafis untuk histogram linier dibuat seperti kasus data linier, yaitu dengan memilih titik awal misal 00 jika range data (00,3600) atau -180 jika range data (-1800,1800). Kemudian membuat interval pengelompokkan (misal 50, 100 atau 200). Histogram dibuat seperti kasus data linier.
b. Sirkular
Histogram sirkular digunakan jika frekwensi dari kelompok data tertentu besar. Panjang garis (bar) dalam suatu daerah (interval pengelompokkan arah) merupakan representasi dari frekwensi data yang terdapat dalam daerah tersebut.
3. Diagram mawar (rose diagram)
Diagram mawar mempresentasikan data sirkular dengan daerah dalam suatu interval pengelompokkan arah. Panjang daerahnya dari pusat mewakili frekwensi dari data pada arah tersebut tetapi representasinya bukan merupakan suatu garis-garis lurus dari pusat melainkan suatu daerah dalam interval pengelompokkan arah.
Statistika Deskriptif Data Sirkular
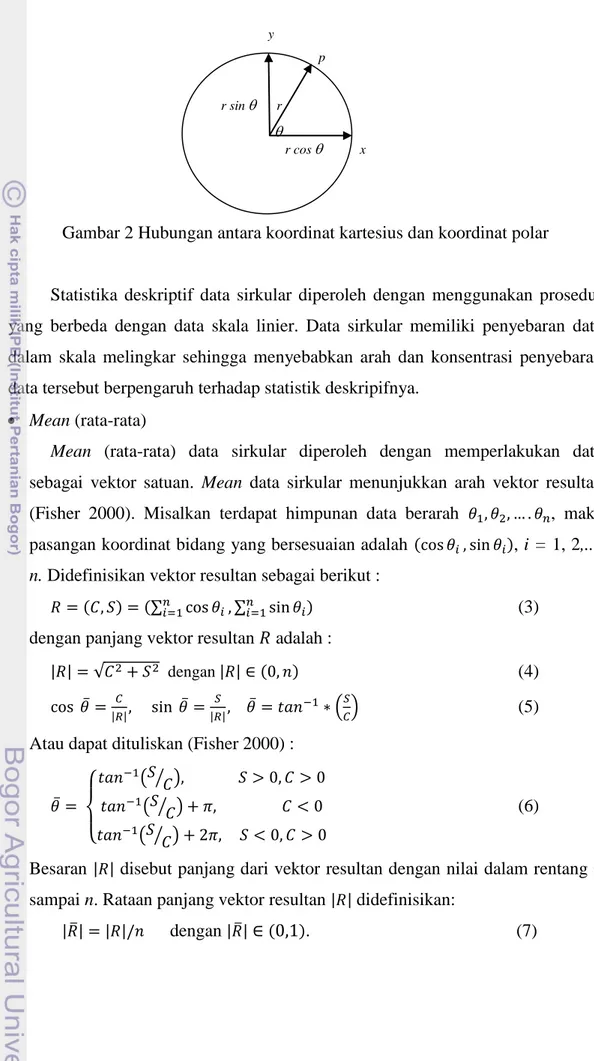
Data sirkular terdiri dari n sampel pengukuran sudut/arah dengan nilai antara 00 – 3600. Data sirkular direpresentasikan sebagai sudut atau titik-titik pada keliling lingkaran yang berjari-jari satu satuan. Posisi arah ditentukan oleh dua koordinat yaitu koordinat kartesius dan koordinat polar. Misalkan terdapat himpunan data (X,Y) dalam koordinat kartesius, maka dalam koordinat polar dapat dinyatakan sebagai (Jammalamadaka & Sengupta 2001):
, (1) karena jari-jari lingkaran adalah 1, maka :
. (2)
y p r sin r r cos x
Gambar 2 Hubungan antara koordinat kartesius dan koordinat polar
Statistika deskriptif data sirkular diperoleh dengan menggunakan prosedur yang berbeda dengan data skala linier. Data sirkular memiliki penyebaran data dalam skala melingkar sehingga menyebabkan arah dan konsentrasi penyebaran data tersebut berpengaruh terhadap statistik deskripifnya.
Mean (rata-rata)
Mean (rata-rata) data sirkular diperoleh dengan memperlakukan data sebagai vektor satuan. Mean data sirkular menunjukkan arah vektor resultan (Fisher 2000). Misalkan terdapat himpunan data berarah , maka pasangan koordinat bidang yang bersesuaian adalah , i = 1, 2,.... n. Didefinisikan vektor resultan sebagai berikut :
(3)
dengan panjang vektor resultan adalah :
dengan (4)
(5)
Atau dapat dituliskan (Fisher 2000) :
(6)
Besaran disebut panjang dari vektor resultan dengan nilai dalam rentang 0 sampai n. Rataan panjang vektor resultan didefinisikan:
Konsentrasi
Nilai konsentrasi menunjukkan seberapa besar data menuju suatu arah tertentu. Nilai konsentrasi ( ) ditentukan dengan formula sebagai berikut (Fisher 2000): (8) Variansi
Variansi data sirkular didefinisikan sebagai :
(9)
dengan adalah rataan panjang vektor resultan, dan . Nilai variansi terkecil terjadi ketika , yaitu ketika data berada pada lokasi yang sama atau menuju suatu titik yang sama (Fisher 2000).
Model Vector Autoregressive (VAR)
Vector Autoregressive (VAR) merupakan suatu sistem persamaan yang melibatkan setiap peubah sebagai fungsi linier dari konstanta dan nilai lag (masa lampau) dari peubah itu sendiri dan nilai lag dari peubah lain yang ada dalam sistem (Enders 1995). VAR diperkenalkan pertama kali oleh Sims pada tahun 1980 sebagai pendekatan alternatif pada pemodelan multi persamaan. Menurut Sims (1980), jika terdapat hubungan yang simultan antar peubah yang diamati maka peubah-peubah tersebut perlu diperlakukan sama, sehingga tidak ada lagi peubah endogen dan eksogen.
Keunggulan VAR antara lain model VAR adalah model yang sederhana dan tidak perlu membedakan mana peubah endogen dan mana peubah eksogen. Semua peubah dalam VAR dapat dianggap sebagai peubah endogen. Cara estimasi model VAR dengan metode kuadrat terkecil (Ordinary Least Square, OLS) pada setiap persamaan secara terpisah. Selain itu, hasil ramalan (forecast) yang diperoleh dengan VAR cukup baik dibandingkan hasil yang didapat dengan menggunakan model lainnya (Nachrowi & Usman 2006).
Model VAR juga memiliki beberapa kelemahan diantaranya VAR bersifat ateoritis (tidak memiliki landasan teori). Hal ini dikarenakan semua peubah dalam VAR adalah endogen dan aspek struktur sebab akibat diabaikan. Selain itu, koefisien didalam VAR sulit untuk diinterpretasikan. Kegunaan VAR adalah untuk prediksi dan menguji stabilitas hubungan sebab akibat (impulse response), jarang sekali perhatian diberikan pada masing-masing koefisien dalam VAR. Kelemahan lain adalah estimasi dapat menjadi tidak efisien terutama jika jumlah sampel yang digunakan sedikit sedangkan peubah dan orde lag yang digunakan banyak (Nachrowi & Usman 2006).
Secara umum model VAR ordo p untuk n peubah dapat diformulasikan sebagai berikut (Enders 1995) :
(10) dengan:
vektor berukuran nx1 yang berisi n peubah yang masuk dalam model
VAR pada waktu t dan t-i, i = 1,2,....p vektor intersep berukuran nx1
matriks koefisien berukuran nxn untuk setiap i = 1,2,...p vektor sisaan berukuran nx1 yaitu
p = ordo VAR t = periode amatan
Suatu VAR sederhana yang terdiri dari dua peubah dan 1 lag dapat diformulasikan sebagai berikut (Enders 1995):
(11)
atau dalam bentuk matriks :
(12)
Parameter dalam model VAR dapat diduga dengan menggunakan metode kuadrat terkecil.
Kestasioneran Data
Sekumpulan data time series dikatakan stasioner jika nilai rata-rata dan varian dari data time series tersebut tidak mengalami perubahan secara sistematik sepanjang waktu atau dengan kata lain rata-rata dan variannya konstan (Nachrowi & Usman 2006). Data yang tidak stasioner dapat dijadikan stasioner, salah satu caranya dengan melakukan pembedaan (differencing) untuk menghilangkan variasi karena tren atau musiman (SAS Institut Inc. 1996).
Kestasioneran masing-masing peubah dapat diperiksa melalui uji Dickey Fuller (Enders 1995). Uji kestasioneran data mengikuti proses autoregresi ordo 1. Misalkan data deret waktu peubah tunggal yt dituliskan :
(13)
dengan model pembedaan dapat dituliskan sebagai :
(14)
Hipotesis yang akan diuji adalah : Ho : (data bersifat tidak stasioner) H1 : (data bersifat stasioner)
Nilai diduga melalui metode kuadrat terkecil dengan membuat regresi antara dan serta pengujian dilakukan dengan menggunakan uji-t. Statistik uji dapat dituliskan sebagai berikut :
(15)
dengan : adalah nilai dugaan dan merupakan simpangan baku dari . Keputusan :
Jika nilai thit < nilai kritis dalam tabel Dickey Fuller, maka tolak Ho yang berarti data bersifat stasioner.
Penentuan Ordo VAR
Jika ordo VAR dilambangkan dengan p, maka setiap n persamaan berisi nxp koefisien ditambah dengan intersep. Menurut Enders (1995), ordo VAR dapat ditentukan dengan menggunakan AIC (Akaike Information Criterion). AIC mengukur kebaikan model yang memperbaiki kehilangan derajat bebas ketika lag
tambahan dimasukkan dalam model. Ordo VAR ditentukan oleh nilai p yang menghasilkan AIC paling kecil.
Menurut Enders (1995), kriteria uji untuk menentukan ordo VAR dengan statistik AIC adalah :
(16)
dengan :
= determinan matriks varian covarian error = jumlah pengamatan
N = jumlah parameter yang diduga dari semua persamaan
Jika setiap persamaan dalam n peubah VAR mempunyai p lag dan intersep, maka N = n2p + n (Enders 1995)
Untuk memperoleh ordo VAR atau panjang lag yang cukup efisien, Enders (1995) melakukan perbandingan beberapa panjang lag, diawali dengan panjang lag yang cukup besar kemudian dilakukan reduksi panjang lag. Dengan demikian untuk menentukan panjang lag harus didasarkan pada kecukupan data pengamatan yang ada.
Identifikasi dan Pendugaan Parameter
Menurut Enders (1995), parameter setiap persamaan pada model VAR persamaan 10 diduga dengan menggunakan metode kuadrat terkecil biasa (ordinary least square, OLS). Pada persamaan tersebut, A0 berisi n intersep dan
masing-masing matriks Ai (i=1, 2,...,p) berisi n2 koefisien, sehingga banyaknya parameter dalam sistem VAR yang harus diduga sebanyak N = n2p + n parameter. Jadi banyaknya parameter yang harus diduga tergantung pada banyaknya peubah-peubah endogen yang terlibat dalam model VAR. Matriks varian covarian dalam
et adalah:
Var(et) = ∑ = (17)
dimana : , i,j = 1, 2,..., n dan untuk semua i dan j.
Statistik Uji Kelayakan Model VAR
Uji Portmanteau digunakan untuk menguji apakah model yang dimiliki sudah layak atau belum (Lutkepohl 1995). Uji ini melakukan diagnostik terhadap
error dengan memeriksa adanya korelasi serial antar sisaan pada beberapa lag. Hipotesis yang diuji adalah sebagai berikut :
Ho : r1 = r2 = .... = rh = 0 (model layak)
H1 : (model tidak layak)
Dengan statistik ujinya adalah sebagai berikut :
(18)
dengan :
T = banyaknya pengamatan untuk error
= matriks korelasi error model VAR
= matriks korelasi error model VAR sampai lag ke i, i = 1, 2,....,h. h = beda kala (lag)
statistik Q mengikuti sebaran Chi- Square dengan derajat bebas n2(h-p) dengan : n = banyaknya peubah VAR
p = ordo VAR
jika nilai–p > α maka terima Ho yang berarti tidak ada komponen autokorelasi yang signifikan sampai lag ke-h.
Fungsi Respon Impuls dan Dekomposisi Ragam
Enders (1995) menyatakan terdapat dua aplikasi populer dari model VAR, yaitu fungsi respon impuls (Impulse Response Function, IRF) dan dekomposisi ragam (Variance Decomposition, VD). IRF menginformasikan pengaruh perubahan shock atau guncangan suatu peubah terhadap peramalan peubah itu sendiri dan peubah lain (Enders 1995). Salah satu kelemahan model VAR adalah sulitnya memberikan interpretasi dari setiap nilai koefisien jika bentuk model dinamik dari VAR semakin rumit dan kompleks. Salah satu solusi untuk mengatasi masalah tersebut adalah dengan menggunakan IRF. Dengan IRF, pengaruh adanya shock atau guncangan pada salah satu peubah terhadap peubah lain yang ada dalam VAR dapat diketahui.
Dekomposisi ragam melakukan dekomposisi atas perubahan nilai suatu peubah yang disebabkan oleh goncangan peubah itu sendiri dan goncangan peubah lain. Varian error prediksi m (m = 1, 2,..) langkah kedepan dipecah berdasarkan bagian yang bersumber dari peubah itu sendiri dan yang bersumber
dari peubah lain. Secara umum diharapkan proporsi varians terbesar bersumber dari peubah itu sendiri. Dekomposisi ragam memisahkan keragaman pada peubah endogen menjadi komponen-komponen shock yang ada dalam sistem VAR.
Misalkan model VAR ordo 1 dengan persamaan :
(19)
dan banyaknya peubah endogen 2 ( dan ), maka peramalan untuk m tahapan kedepan adalah (Enders 1995) :
E(yt+m) = (I+A1+ A12+ ... + A1m-1) A0 + A1myt (20) dengan error ramalan sebesar :
yt+m - E(yt+m) = = (21)
dengan :
(22)
Koefisien dapat digunakan untuk membangkitkan pengaruh dari guncangan (shock) peubah atau ( atau ) tehadap deret atau . Sebagai contoh, koefisien adalah pengaruh langsung satu unit perubahan
terhadap . Dengan cara yang sama, elemen dan adalah
respon dari perubahan unit dan pada . Pada periode ke-n, efek pada nilai adalah . Koefisien , , dan disebut sebagai fungsi respon impuls. Pengaruh shock tersebut dapat dilihat secara visual dengan menggunakan plot antara koefisien dengan i.
Ketepatan Metode Peramalan (Validasi model)
Model yang diperoleh digunakan untuk meramal data pada periode yang akan datang. Ketepatan peramalan dihitung dengan menggunakan MAPE (Mean Absolute Percentage Error) atau rataan persentase kesalahan absolut. Rumus yang digunakan untuk menentukan nilai MAPE adalah (Makridakis & Wheelwright 1999):
MAPE =
(23)
dengan : = data aktual = data ramalan
Semakin kecil nilai MAPE, maka data hasil peramalan semakin mendekati nilai aktual.