Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Andi Wicaksono
NIM :
025114048
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Andi Wicaksono
Student ID Number : 025114048
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
Kupersembahkan karya tulis ini kepada :
” Tuhan Yesus Kristus terkasih,
Bapak dan Ibu Tercinta,
Kedua saudaraku Esti dan Ica tercinta,
Keluarga besarku tercinta,
Kekasihku tersayang,
Teman-temanku elektro 2002,
“ Dari berbagai permasalahan yang ada pasti ada
satu j alan keluarnya,
walaupun untuk menyelesaikannya diperlukan
perj uangan”
“ Ubahlah suatu hambatan menj adi suatu
tantangan, dan
suatu kegagalan menj adi suatu awal dari
INTISARI
Sistem Pengendali Suhu Air Berbasis Rangkaian Digital ini merupakan suatu
usaha memperoleh suhu air dengan mengaplikasikan rangkaian digital. Rangkaian
elektronik dari sistem Pengendali Suhu Air Berbasis Rangkaian Digital ini terdiri
dari beberapa bagian utama yaitu : (1) sensor suhu, (2) rangkaian
set point
, (3)
pengondisi sinyal, (4) pengubah tegangan analog ke digital, (5) komparator, (6)
kontroler, (7) penggerak, (8) plan/pemanas, dan (9) rangkaian penampil.
Pada penerapan pengendalian ini suhu akan dibatasi dengan beberapa nilai
set
point
yaitu
: set point
I: 40°C,
set point
II: 70°C, dan
set point
III: 90°C. Jadi pada
saat
set point
I: 40°C ditekan, maka plan/pemanas akan menyala menghasilkan suhu
sebesar 40°C dan suhu tersebut akan dipertahankan sesuai dengan perbandingan nilai
biner antara
set point
dengan sensor sama dimana plan/pemanas akan mati, dan suhu
perlahan-lahan akan turun sehingga perbandingan nilai biner menjadi berbeda maka
plan/pemanas akan hidup sampai nilai biner antara
set point
dengan sensor sama .
Pada saat sistem dilakukan pengujian, dapat diketahui bahwa perangkat
elektronis yang dibuat sudah dapat digunakan sebagai piranti pengendali untuk
mengatur batasan suhu air yang diinginkan.
Abstract
This Digital Connecting Structure-based Water Temperature Controlling
System is an excretion to get the determined water temperature by applying the
digital connecting structure. The electronic circuit of Digital Connecting
Structure-based Water Temperature Controlling System is divided into several main parts: (1)
the temperature sensor, (2) set point connecting structure, (3) signal conditioner, (4)
analog to digital conversion, (5) comparator, (6) controller, (7) driver, (8) heater,
and (9) projector circuit.
In applying this controlling system, the temperature is limited with several set
point: set point I: 40°C, set point II: 70°C, and set point III: 90°C. Therfore,
whwnever set point I: 40°C is pressed, it will turn on the heater cusing 40°C
temperature and the temperature will be kept appropriately in accordance to the
comparison between binary value and set point using the same sensor in which the
heater is turned off and the temperature will slowly decrease, so that the comparison
of the binary value will be different. Thus, the heater will be turned on until the
binary value of the set point and the sensor reach the same value.
When the system was tested, can be known that periperal electronis which
made have earned to be used as controller apparatus to arrange wanted water
temperature constrain
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan yang Maha Esa, karena atas
Anugerah-Nya penulis akhirnya dapat menyelesaikan tugas akhir ini dengan baik dan
lancar.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan perhatian dan bantuan dengan caranya
masing-masing sehingga tugas akhir ini dapat terselesaikan. Oleh karena itu penulis ingin
mengucapkan terima kasih antara lain kepada :
1.
Tuhan Yesus atas penyertaan dan bimbingannya.
2.
Bapak Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc. selaku Dekan Fakultas
Teknik.
3.
Bapak Augustinus Bayu Primawan, S.T., M.Eng. selaku Ketua Jurusan Teknik
Elektro.
4.
Ibu B. Wuri Harini, S.T., M.T. selaku pembimbing I atas ide-ide yang berguna,
bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal sampai tugas
akhir ini bisa selesai.
5.
Ibu Ir. Th Prima Ari Setyani, M.T. selaku pembimbing II yang telah bersedia
meluangkan waktu serta memberikan bimbingan dan saran yang tentunya sangat
7.
Seluruh dosen teknik elektro atas ilmu yang telah diberikan selama penulis
menimba ilmu di Universitas Sanata Dharma Yogyakarta.
8.
Bapak dan Ibu tercinta atas semangat, doa serta dukungan secara moril maupun
materiil.
9.
Kedua saudaraku, Esti dan Ica atas dukungan, cinta, bantuan yang sangat
berguna.
10.
Kekasihku tersayang
, atas segala waktu, bantuan dan dukungannya.
11.
Teman-teman elektro ”2002” : Nango, Dhanny, Bhul’s, Gepeng, Deri, Plenthonx,
Memet, Lambe’z, Roby, Broto, Wawan, Hari, P-K, Lele, Dhika, Sinung, Oscar,
Ido, Kobo, Ari W, Denny, Yoga, Koten, Ahok, Iyok, Erick, Andi S, Alex, Pandu,
Heri S dan teman-teman seperjuangan lain yang tidak dapat saya sebutkan satu
persatu di sini. Saya ucapkan banyak terima kasih atas dukungannya.
12.
Dan seluruh pihak yang telah ambil bagian dalam proses penulisan tugas akhir ini
yang terlalu banyak jika disebutkan satu-persatu.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih kurang dari
sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini
sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua
pihak. Terima kasih.
DAFTAR ISI
HALAMAN JUDUL ...
i
HALAMAN PERSETUJUAN PEMBIMBING ...
iii
HALAMAN PENGESAHAN...
iv
HALAMAN PERNYATAAN KEASLIAN KARYA ...
v
HALAMAN PERSEMBAHAN ...
vi
HALAMAN MOTTO ...
vii
INTISARI ...
viii
ABSTRACT ...
ix
KATA PENGANTAR...
x
DAFTAR ISI...
xii
DAFTAR GAMBAR
...
xvi
DAFTAR TABEL ...
xix
BAB I. PENDAHULUAN
1.1
Judul……… 1
1.2
Latar Belakang ... 1
1.7
Metodologi Penelitian ... 3
1.8
Sistematika Penulisan ... 4
BAB II. DASAR TEORI
2.1 Sensor
Temperature
LM35 ... 5
2.2 Gerbang-gerbang
Logika ...
6
2.2.1 Gerbang Logika AND ... 6
2.2.2 Gerbang Logika OR ... 7
2.2.3 Gerbang Logika NOT ... 8
2.2.4 Gerbang Logika NAND ... 8
2.2.5 Gerbang Logika NOR ... 9
2.2.6 Gerbang Logika OR-Eksklusif... 9
2.2.7 Gerbang Logika NOR-Eksklusif... 10
2.3
Set point
... 11
2.3.1 Pembagi Tegangan ... 11
2.3.2
Buffer
Tegangan ... 12
2.4 ADC(
Analog to Digital Converter
) ... 13
2.5 Karakteristik Dasar Alat Pengendali... 17
2.6
Triac
... 18
2.11 Tanggapan
Sistem
... 28
2.12 Metode
Ziegler-Nichols
... 30
BAB III PERANCANGAN
3.1 Diagram Blok ... 33
3.2
Plan Pengendali Suhu Air... 34
3.3 Sensor
LM35 ...
35
3.4
Set point
... 37
3.4.1 Pembagi Tegangan ... 37
3.4.2
Buffer
Tegangan ... 39
3.5 Antarmuka
Set Point
dengan ADC0804... 40
3.6
Analog to Digital Converter
(ADC
0804) ...
40
3.7 Antarmuka LM35 dengan ADC0804 ... 43
3.8 Pembanding
(
Comparator)
Sebagai Kontroler... 44
3.9
Driver
... 45
3.10 Pengkode BCD ke Tujuh Segmen ... 47
3.11 Pengondisi Sinyal ... 49
4.2.2
Pengujian
Set Point
70
oC ... 56
4.2.3 Pengujian
Set Point
90
oC ... 59
4.2.4 Perbandingan Respon Hasil Pengujian ... 63
4.3
Pengamatan Rangkaian Pengondisi Sinyal ... 64
4.4 Pengamatan
Rangkaian
ADC...
66
4.5 Pengamatan
Rangkaian
Pembanding ...
67
4.6 Pengamatan
Rangkaian
Driver
……… ... 68
4.7
Pengamatan Rangkaian BCD ke Tujuh Segmen ………... 70
4.8
Pengamatan Tampilan Tujuh Segmen ... 71
BAB V. Kesimpulan dan Saran
5.1 Kesimpulan
...
73
5.2 Saran
...
74
DAFTAR PUSTAKA
DAFTAR GAMBAR
Halaman
Gambar 2.1
Pin koneksi LM 35... 5
Gambar 2.2.a
Sistem pensaklaran gerbang logika AND... 6
Gambar 2.2.b
Gerbang logika AND... 6
Gambar 2.3.a
Sistem pensaklaran gerbang logika OR... 7
Gambar 2.3.b
Gerbang logika OR... 7
Gambar 2.4.a
Sistem pensaklaran gerbang logika NOT... 8
Gambar 2.4.b
Gerbang logika NOT... 8
Gambar 2.5
Gerbang logika NAND... 9
Gambar 2.6
Gerbang logika NOR... 9
Gambar 2.7
Gerbang OR-
eksklusif
... 10
Gambar 2.8
Gerbang NOR-
eksklusif
... 10
Gambar 2.9
Rangkaian pembagi tegangan ... 12
Gambar 2.10
Konfigurasi
buffer
tegangan ... 12
Gambar 2.11
Diagram blok pengubah analog ke digital... 13
Gambar 2.12
Konfigurasi pin-pin IC ADC 0804... 13
Gambar 2.13
Bentuk fisik
triac
... 18
Gambar 2.18
Untai penampil tujuh segmen... 26
Gambar 2.19
Bentuk bilangan desimal tampilan tujuh segmen... 27
Gambar 2.20
Rangkaian pengkondisi sinyal... 28
Gambar 2.21
Kurva respon tangga satuan yang menunjukkan
td, tr, tp
Mp,
dan
ts
... 30
Gambar 2.22
Kurva respons tangga satuan yang memperlihatkan 25%
,
lonjakan. maksimum... 31
Gambar 2.23
Respon tangga satuan sistem... 31
Gambar 3.1
Diagram blok pengendali suhu air berbasis rangkaian digital... 33
Gambar 3.2
Papan tampilan dan
set point
... 34
Gambar 3.3
Plan... 34
Gambar 3.4
Input
dan
output
tegangan pada sensor suhu LM35... 35
Gambar 3.5
Rangkaian pembagi tegangan
dan
buffer
... 39
Gambar 3.6
Antarmuka set point dengan ADC 0804... 40
Gambar 3.7
Rangkaian ADC... 43
Gambar 3.8
Antarmuka sensor LM 35 dengan ADC 0804... 43
Gambar 3.9
Gambar pembanding (komparator) 4 bit... 45
Gambar 3.10 Interfacing triac
dengan rangkaian MOC 3021... 46
Gambar 4.3
Respon sistem untuk
set point
40
oC... 55
Gambar 4.4
Grafik hubungan antara waktu dan suhu untuk
set point
70
oC... 57
Gambar 4.5
Respon sistem untuk
set point
70
oC... 59
Gambar 4.6
Grafik hubungan antara waktu dan suhu untuk
set point
90
oC... 61
DAFTAR TABEL
Halaman
Tabel 2.1 Tabel kebenaran gerbang logika... 11
Tabel 2.2 Macam-macam MOC30XX... 22
Tabel 2.3 Karakteristik masukan dan keluaran BCD... 24
Tabel 2.4 segmen yang aktif untuk setiap angka desimal... 27
Tabel 3.1 Konversi suhu ke tegangan pada sensorLM35... 36
Tabel 4.1 Hasil pengambilan data untuk
set point
40
oC... 52
Tabel 4.2 Hasil pengambilan data untuk
set point
70
oC... 56
Tabel 4.3 Hasil pengambilan data untuk
set point
90
oC... 60
Tabel 4.4 Data
Maximum overshoot, Delay Time, Rise Time, Settling Time
dan
Steady-state Error
... 63
Tabel 4.5 Hasil pengukuran tegangan keluaran sensor dan pengkondisi sinyal... 65
Tabel 4.6 Hasil pengamatan
input
dan
output
ADC... 66
1.1 Judul.
Pengendali Suhu Air Berbasis Rangkaian Digital
1.2
Latar Belakang Masalah.
Di dalam kehidupan sehari-hari manusia pasti sering mendengar kata
”heater”
di mana kata tersebut berasal dari bahasa asing yang berarti pemanas dan
Heater
tersebut dapat diperoleh di supermarket-supermarket. Perangkat elektronik
tersebut sering digunakan manusia untuk mempermudah dan mempercepat suatu
proses pemanasan air tawar namun dengan suhu yang tidak dapat ditentukan oleh si
pengguna. Pengguna hanya bisa mengetahui bahwa suhu air ± 100 derajat celcius,
saat air telah mendidih. Di dalam sistem pengendali suhu air berbasis rangkaian
digital dibuat dengan beberapa nilai
set point
supaya dapat memperoleh suhu air
yang diinginkan, dimana
set point
suhu air yang diinginkan meliputi : 40
oC, 70
oC,
dan 90
oC. Alat tersebut selain dirancang untuk mendapatkan suhu air yang diinginkan
1.3. Perumusan Masalah.
Di dalam pembuatan pengendali suhu air ini muncul beberapa perumusan
masalah diantaranya sebagai berikut :
a.
Apakah di dalam pemilihan komponen yang tepat dapat mempengaruhi proses
perancangan pengendali alat ini ?
b.
Apakah kinerja sistem sudah sesuai dengan yang diharapkan ?
c.
Apakah suhu air yang ditetapkan sudah sesuai dengan
set point
?
1.4. Batasan Masalah.
Dalam pembuatan Tugas Akhir dengan judul Pengendali Suhu Air Berbasis
Rangkaian Digital dibatasi pada masalah-masalah sebagai berikut :
a.
Pengukuran suhu dengan menggunakan sensor temperatur LM35
b.
Proses pengubahan sinyal dari sinyal analog ke sinyal digital dengan
menggunakan ADC0804.
c. Pemanas
(Heater)
akan dihidupkan dan dimatikan secara otomatis oleh suatu
penggerak
(driver)
dimana digunakan suatu komponen MOC 3021
.
d. Dipakai untuk kenaikan suhu yang ditentukan yakni : 40
oC, 70
oC, dan 90
oC.
1.5. Tujuan penelitian.
Tujuan pembuatan Tugas Akhir ini adalah sebagai berikut :
Membuat perangkat elektronis berbasis Rangkaian Digital sebagai piranti
pengendali yang dapat digunakan untuk mengatur batasan temperatur suhu air yang
diinginkan.
1.6. Manfaat Penelitian.
Pembuatan pengendali suhu air berbasis Rangkaian Digital ini supaya dapat
mempermudah dalam mengatur batasan suhu air yang diinginkan. Sehingga apabila
pemakai menginginkan keadaan air yang bersuhu konstan dapat mempergunakan
peralatan ini.
1.7. Metodologi Penelitian.
Penulis melakukan penelitian dengan melakukan metodologi sebagai berikut:
a.
Mengumpulkan referensi dan literatur dari perpustakaan dan internet.
b.
Pembuatan
plant
yang terkonsep.
c.
Pengambilan data dari
plant
.
d.
Perancangan pengendali sesuai dengan yang diinginkan.
1.8. Sistematika penulisan
Sistematika
penulisan
laporan
tugas akhir ini adalah sebagai berikut :
BAB I
Pendahuluan
Bab ini berisi tentang latar belakang masalah, tujuan dan manfaat
dari penelitian, batasan masalah, metodologi penelitian, serta
sistematika penulisan
BAB II
Dasar Teori
Bab ini berisi tentang dasar teori yang digunakan untuk membuat
Pengendali suhu air yang disertai dengan penjelasan.
BAB III
Rancangan Penelitian
Bab ini berisi tentang rancangan peralatan yang dibuat,
pemilihan komponen, serta penjelasan singkat tentang cara kerja
peralatan.
BAB IV
Hasil dan Pembahasan
Bab ini berisi tentang pembahasan dan analisis mengenai hasil
penelitian yang telah dilaksanakan.
BAB V
Kesimpulan dan Saran
Bab ini berisi tentang kesimpulan dan spesifikasi peralatan yang
dibuat serta saran-saran untuk perbaikan alat dan penilitian
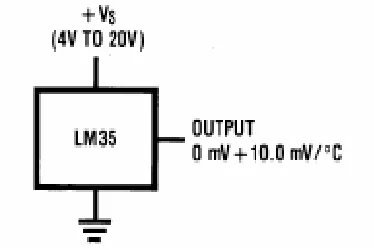
2.1 Sensor
Temperature
LM35
Sensor merupakan perangkat elektronik yang dapat difungsikan
sebagai pengubah besaran fisik(suhu) menjadi besaran listrik(tegangan) [1].
Pembuatan sensor
temperature
bergantung pada pemanfaatan beberapa
material yang mengalami perubahan sebagai fungsi perubahan
temperature
.
Suatu pendekatan telah dikembangkan dimana perbedaan tegangan
basis dan emitter dari dua transistor yang bekerja pada kerapatan arus yang
berbeda sebagai ukuran
temperature
. Pin koneksi sensor LM 35 ditunjukkan
pada gambar 2.1 berikut ini :
Gambar 2.1 Pin koneksi LM 35.
Sensor LM 35 ini mempunyai tegangan masukan sebesar 4V sampai
20V. Dan sensor tersebut menghasilkan tegangan keluaran sebesar 0 mV + 10
2.2
Gerbang-gerbang Logika
Gerbang logika adalah suatu rangkaian logika dengan satu atau beberapa
masukan dan satu keluaran dengan sinyal keluaran hanya terjadi untuk
kombinasi-kombinasi sinyal masukan tertentu [3]. Gerbang logika merupakan
rangkaian yang dirancang untuk menghasilkan fungsi-fungsi logika dasar seperti
AND, OR, dan NOT. Empat gerbang logika yang lain yang bermanfaat dapat
dibuat dari piranti dasar ini. Gerbang-gerbang tersebut diantaranya gerbang
NAND, gerbang NOR, gerbang OR-eksklusif, dan gerbang NOR-eksklusif.
2.2.1 Gerbang Logika AND
Rangkaian gerbang AND adalah gerbang logika yang memiliki
masukan dua atau lebih dan memiliki satu keluaran. Gerbang AND
mempunyai keluaran tinggi jika semua masukannya tinggi, sebaliknya jika
salah satu atau semua masukannya berlogika rendah maka keluarannya
berlogika rendah [2]. Perhatikan gambar 2.2a, bila salah satu dari saklar
tersebut tidak terhubung, maka tidak ada arus yang akan mengalir pada
rangkaian. Gerbang yang diperlihatkan pada gambar 2.2b merupakan gerbang
Gambar 2.2 Gerbang logika AND : ( a ) sistem pensaklaran; ( b ) sistem
pensaklaran dengan menggunakan transistor
Tabel kebenaran gerbang AND dapat dilihat pada tabel 2.1.
2.2.2 Gerbang Logika OR
Gerbang logika OR dianalogikan dengan sistem pensaklaran yang
dipasang secara parallel. Perhatikan gambar 2.3a, bila salah satu dari saklar
tersebut tidak terhubung, maka akan ada arus yang mengalir melalui cabang
yang lain pada rangkaian. Gerbang OR akan menghasilkan keluaran tinggi
bila pada satu atau beberapa masukannya berada dalam kondisi
tinggi.Gerbang yang diperlihatkan pada gambar 2.3b merupakan gerbang
logika OR yang menggunakan 2 ( dua ) buah transistor yang dipasang secara
paralel.
Gambar 2.3 Gerbang logika OR : ( a ) sistem pensaklaran; ( b ) sistem
pensaklaran dengan menggunakan transistor.
2.2.3 Gerbang Logika NOT
Gerbang logika NOT disebut juga inverter( pembalik ). Gerbang
logika ini hanya memiliki sebuah masukan dan sebuah keluaran. Perhatikan
gambar 2.4a, bila saklar dalam keadaan tertutup, maka relai tidak akan bekerja.
Sebaliknya, bila saklar dalam keadaan terbuka, maka relai akan bekerja dan
membuat arus mengalir pada rangkaian. Gerbang yang diperlihatkan pada gambar
2.4b merupakan gerbang logika NOT yang menggunakan sebuah transistor
sebagai saklar.
Gambar 2.4 Gerbang logika NOT : ( a ) sistem pensaklaran; ( b ) sistem
pensaklaran dengan menggunakan transistor.
Tabel kebenaran gerbang NOT dapat dilihat pada tabel 2.1.
2.2.4 Gerbang Logika NAND
Gerbang logika NAND seperti gerbang AND dengan penambahan
inverter pada keluaran. Simbol dari gerbang logika NAND yaitu gerbang
logika AND dengan lingkaran kecil pada keluarannya seperti yang
Gambar 2.5 Gerbang NAND
Tabel kebenaran gerbang NAND dapat dilihat pada tabel 2.1.
2.2.5 Gerbang Logika NOR
Gerbang logika NOR seperti gerbang OR dengan penambahan inverter
pada keluarannya. Simbol dari gerbang logika NOR yaitu gerbang logika OR
dengan lingkaran kecil pada keluarannya seperti yang ditunjukkan pada
gambar 2.6 di bawah ini.
Gambar 2.6 Gerbang NOR
Tabel kebenaran gerbang NOR dapat dilihat pada tabel 2.1.
2.2.6 Gerbang Logika OR-Eksklusif
Gerbang OR-
eksklusif
sering kali disingkat sebagai
XOR, dimana
hanya akan berlogika 1 bila mempunyai satuan bilangan ganjil(01 dan 10) dan
akan berlogika 0 bila mempunyai satuan bilangan genap(00 dan 11). Gerbang
dan inverter(pembalik). Untuk lebih jelasnya dapat ditunjukkan pada gambar
2.7 di bawah ini.
Gambar 2.7 Gerbang OR-
eksklusif
Tabel kebenaran gerbang OR-
eksklusif
dapat dilihat pada tabel 2.1.
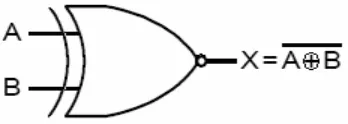
2.2.7 Gerbang Logika NOR-Eksklusif
Gerbang logika NOR-
eksklusif
(XNOR) seperti gerbang XOR dengan
penambahan inverter pada keluarannya. Berbeda dengan XOR yang
merupakan pendeteksi satuan bilangan ganjil. Gerbang XNOR mendeteksi
satuan bilangan genap, dimana hanya akan berlogika 1 bila mempunyai satuan
bilangan genap(00 dan 11) dan akan berlogika 0 bila mempunyai satuan
bilangan ganjil(01 dan 10). Simbol dari gerbang logika NOR-
eksklusif
yaitu
gerbang logika XOR dengan lingkaran kecil pada keluarannya seperti yang
ditunjukkan pada gambar 2.8 di bawah ini.
Tabel kebenaran gerbang NOR-
eksklusif
dapat dilihat pada tabel 2.1.
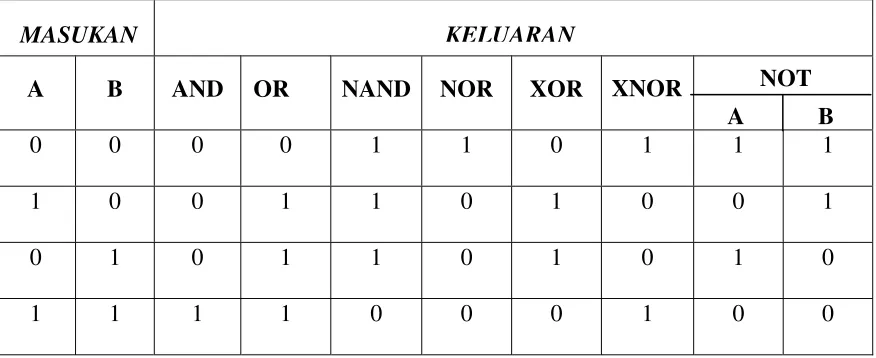
Tabel 2.1 Tabel kebenaran gerbang logika
A B
AND
OR NAND
NOR
XOR
KELUARAN
MASUKAN
0
0 0 0 1 1 0 1 1 1
1
0 0 1 1 0 1 0 0 1
0
1 0 1 1 0 1 0 1 0
1
1 1 1 0 0 0 1 0 0
NOT
XNOR
A B
2.3
Set Point
Set Point
adalah harga yang diinginkan bagi variabel yang dikontrol
selama pengontrolan [7]. Rangkaian
set point
terdiri dari rangkaian pembagi
tegangan dan
buffer
.
2.3.1 Pembagi Tegangan
Rangkaian pembagi tegangan merupakan rangkaian yang
dibangun dari susunan potensiometer dan resistor, dengan konfigurasi
Gambar 2.9 Rangkaian Pembagi Tegangan
Untuk persamaan V
outditentukan sebagai berikut :
Vcc
R
R
V
2 1
2
out
x
R
+
=
………...…...(2.1)
2.3.2
Buffer
Tegangan
Buffer
tegangan berfungsi untuk mempertahankan tegangan
output
agar tidak terbebani oleh beban. Nilai amplitudo tegangan
output
sama dengan nilai amplitudo tegangan
input
yang diberikan.
Konfigurasi
buffer
tegangan seperti pada gambar 2.10.
2.4 ADC (
Analog to Digital Converter
)
Pengubah sinyal analog ke sistem digital disebut pengkode atau
encoder
[2]. Gambar 2.11 memperlihatkan diagram blok pengubah analog ke
digital yang dapat memberikan gambaran mengenai pengubahan sinyal analog
ke digital.
Gambar 2.11 Diagram blok pengubah analog ke digital
Dari diagram blok gambar 2.11, masukan berupa sinyal listrik analog
yang harus diubah menjadi keluaran biner dari bit paling rendah (LSB) sampai
ke bit yang paling tinggi (MSB).
Pada gambar 2.12 ditunjukkan konfigurasi pin-pin IC ADC 0804.
Fungsi masing-masing pin tersebut adalah sebagai berikut:
1.
Pin1 dan pin 2 (CS dan RD).
Jika CS rendah dan RD tinggi, maka pin 11 sampai 18 (D0 – D7)
mengambang dan tidak mengeluarkan data digital.
2.
Pin 3 (WR).
Merupakan sinyal konversi. Jika WR rendah, konversi mengalami
reset dan jika WR tinggi maka konversi segera dimulai.
3.
Pin 4 dan pin 19 (Clk In dan Clk R)
Frekuensi detak konverter harus terletak dalam daerah frekuensi 100
KHz sampai 1460 KHz. Clk In dapat diturunkan dari detak CPU. Jika
sistem beroperasi pada detak frekuensi lebih besar daripada 800 KHz
maka dapat diturunkan dengan menyambung rangkaian RC antara Clk
In dan Clk R untuk mendapatkan frekuensi yang diinginkan dan dapat
dirumuskan sebagai berikut:
f
Clk=
⎟
⎠
⎞
⎜
⎝
⎛
×
×
R
C
1
,
1
1
………...…... (2.2)
4.
Pin 5 (INTR)
Sinyal INTR merupakan sinyal selesai konversi. Bila INTR bernilai
tinggi maka hal itu akan menandakan konversi dimulai, dan sebaliknya
jika INTR bernilai rendah maka hal itu menandakan konversi telah
5.
Pin 6 [Vin(+)].
Merupakan tegangan masukan analog positif.
6.
Pin 7 [Vin(-)].
Merupakan tegangan masukan analog negatif.
7.
Pin 8 dan 10 (Agnd dan Vgnd).
Pin 8 merupakan pin Agnd dan pin 10 merupakan Vgnd. Kedua pin ini
harus dihubungkan ke tanah
(ground)
.
8.
Pin 9 (V
ref/
2).
Merupakan tegangan masukan analog maksimum, yaitu tegangan yang
menghasilkan suatu keluaran digital maksimum FFH. Apabila pin 9 ini
tidak dihubungkan maka V
refbernilai sama dengan tegangan catu
(V
cc).
9.
Pin 11 – 18 (D
7– D
0)
Pin 11 – 18 atau D
7– D
0merupakan keluaran ADC yang
berupa sinyal digital.
10.
Pin 20 (V
cc)
Sebagai masukan tegangan catu maksimum sebesar 5 volt.
Hal-hal yang juga perlu diperhatikan dalam penggunaan ADC ini
adalah tegangan maksimum yang dapat dikonversikan oleh ADC dari
rangkaian pengkondisi sinyal, resolusi, pewaktu eksternal ADC, tipe keluaran,
Beberapa karakteristik penting ADC :
1.
Waktu konversi
2.
Resolusi
3.
Ketidaklinieran
4.
Akurasi
Sesuai dengan rumusan pada data sheet ADC 0804, frekuensi
clock
dan waktu konversi dengan konfigurasi
typical
pada
datasheet.
C
x
R
1,1
1
×
=
clock
f
Tc =
fclock
1
...(2.3)
Resolusi ADC dinyatakan dengan persamaan 2.3.
255
V
-V
Resolusi
=
ref(+) ref(-)...(2.4)
Keterangan :
Resolusi = Ketelitian ADC
V
ref(+)= Referensi tegangan atas
V
ref(-)= Referensi tegangan bawah
Sesuai dengan penggunaan
typical
pada
datasheet
ADC 0804 dengan
2
reff
V
ADC
Resolusi
konversi
Tegangan
Level
=
...(2.5)
Perubahan ADC tiap bit dinyatakan dengan persamaan 2.5.
Tegangan konversi = Level x Resolusi ADC...(2.6)
Dengan konfigurasi kaki 7 (Vin
(-)) mendapat masukan tegangan
referensi bawah sebesar 0Volt, dan kaki 9 (V
ref/2) mendapat masukan tegangan
sebesar 1,275 Volt. Dari hal itu diperoleh persamaan :
2
Vref(-)
-)
Vref(
V
ref/2+
=
...(2.7)
2.5 Karakteristik Dasar Alat Pengendali.
Suatu alat pengendali dirancang untuk menjalankan suatu perintah
masukan dan kemudian menjalankan sesuai dengan perintah masukan tersebut
[6]. Untuk menjalankan perintah masukan, suatu alat pengendali harus
mempunyai suatu kemampuan mengolah atau menterjemahkan perintah secara
tepat dan benar. Dalam pengerjaan tugas akhir ini, perintah diolah dan
dikendalikan oleh suatu rangkaian digital yang kemudian hasil dari pengolah
tersebut dijalankan oleh penggerak dalam hal ini penggerak yang dimaksud
adalah
driver
.
Alat pengendali akan dinyatakan bekerja secara baik apabila mampu
menjalankan perintah secara benar dan proses jalan perintah harus sesuai
mempengaruhi baik atau tidak suatu alat pengendali. Yang dimaksud dengan
faktor waktu disini adalah kemampuan alat untuk menjalankan perintah secara
cepat dan tepat, yakni jika diberi perintah maka alat akan langsung
menjalankan perintah pada saat itu juga.
Jadi suatu alat kendali akan dinyatakan mampu bekerja secara baik
jika alat tersebut mampu menjalankan perintah masukan sesuai dengan
perintah yang diberikan dan perintah tersebut dijalankan oleh alat tersebut
dengan cepat. Disamping itu harus mempunyai ketepatan yang baik yaitu
sesuai atau mendekati dengan perancangan, dan juga mempunyai keakuratan
yang baik. Keakuratan ditentukan dengan cara mengkalibrasi alat tersebut
sesuai dengan syarat yang telah ditentukan.
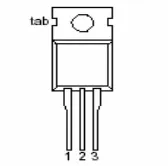
2.6
Triac
Triac
atau AC
switch
, merupakan saklar arus bolak–balik bentuk
Keunggulan
triac
adalah dapat digunakan untuk mengatur daya dalam
batas–batas lebih lebar, artinya dengan
triac
arus dapat mengalir ke arah bolak
– balik,
triac
dipakai untuk pengaturan daya gelombang penuh, triac juga
dapat dipakai untuk pengemudian arus yang relative besar, dari sumber
berdaya kecil dan keunggulannya adalah mudah dan sederhana dalam
pemakaian.
Triac
mempunyai tiga terminal; dua terminal utama yakni MT1
dan MT2 serta satu gerbang G (
gate
). Terminal MT1 dan MT2 dirancang
demikian sebab aliran arus adalah dua arah.
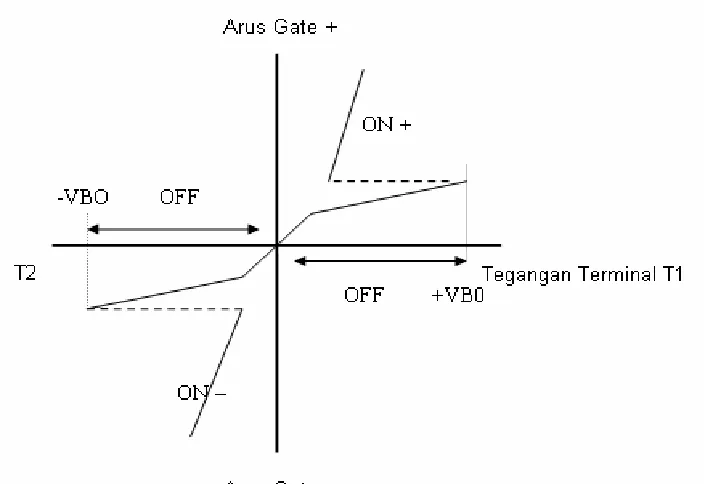
Jika terminal MT1 dan MT2 diberi tegangan AC dan
gate
dalam
kondisi mengambang maka tidak ada arus yang dilewatkan oleh
triac
sampai
pada tegangan
breakover
triac
tercapai. Pada kondisi ini
triac
OFF
. Pada saat
gate
diberi arus positif atau negatif maka tegangan
breakover
ini akan turun.
Semakin besar nilai arus yang masuk ke
gate
maka semakin rendah tegangan
breakover-
nya. Pada kondisi ini
triac
menjadi
ON
selama tegangan pada
MT1 dan MT2 di atas nol volt. Apabila tegangan pada MT1 dan MT2 sudah
mencapai nol volt maka kondisi kerja
triac
akan berubah dari
ON
ke
OFF
.
Ketika
triac
sudah menjadi
OFF
kembali, triac akan selamanya
OFF
sampai
ada arus
trigger
ke
gate
dan tegangan MT1 dan MT2 melebihi tegangan
Gambar 2.14 Kurva karakteristik
triac
2.7
Solid-State Relay(Optoisolator)
.
Pada relai yang berjenis relai solid state
(solid-state relay =
SSR
)
ini
tidak mempunyai kumparan dan kontak sesungguhnya dibandingkan dengan
relai elektromekanis
(Electromechanics relay =
EMR
)
[4]
.
Sebagai pengganti
digunakan alat penghubungan semikonduktor seperti transistor bipolar,
MOSFET, SCR, atau
triac
,
misalnya MOC 30XX seperti pada gambar 2.15.
kelembaban. SSR merupakan aplikasi pada pengisolasian rangkaian kontrol
tegangan-rendah dari rangkaian beban-daya-tinggi. Dioda yang memancarkan
cahaya(LED) yang digabungkan pada rangkaian input menyala mengeluarkan
cahaya apabila kondisi pada rangkaian benar-benar untuk mengaktifkan relai.
Cahaya LED pada fototransistor, yang kemudian menghantar, menyebabkan
arus trigger diberikan pada
triac
.
Solid-state Relay
dapat digunakan untuk mengontrol beban ac atau dc.
Jika relai dirancang untuk mengontrol beban ac, digunakan
triac
untuk
menghubungkan ke beban (
heater)
. Tegangan kontrol untuk SSR dapat arus
searah dan bolak-balik, dan biasanya berkisar antara 3 sampai 32 V untuk DC
dan 80 dan 280 V untuk AC. Arus beban maksimum mencapai 50 A adalah
mungkin pada ukuran kerja tegangan beban (
heater)
120, 240, dan 480 Vac.
Pada sebagian besar aplikasi, SSR digunakan sebagai perantara antara
rangkaian kontrol tegangan rendah dengan tegangan beban(
heater)
ac yang
lebih tinggi. Macam-macam MOC beserta karakteristik arus dan tegangan
dapat di lihat pada tabel 2.2.
SSR mempunyai beberapa keuntungan dibandingkan dengan EMR.
SSR lebih terpercaya dan mempunyai umur pemakaian yang lebih panjang.
karena SSR tidak mempunyai bagian yang berputar, dapat juga digabungkan
interferensi elektromagnetis. SSR lebih tahan terhadap goncangan dan
terhadap getaran, mempunyai waktu respon yang lebih cepat.
Gambar 2.15 Skema dari MOC30XX (SSR)
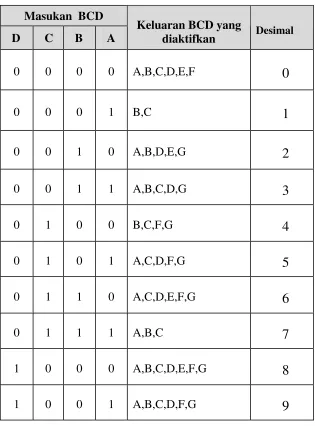
2.8 Pengkode BCD ke tujuh segmen
Pengkode merupakan suatu penerjemah kode [5]. Pengkode
merupakan rangkaian logika gabungan dengan beberapa masukan dan
keluaran. Kebanyakan berisi 20 sampai 50 gerbang. Kebanyakan pengkode
dipaketkan dalam paket IC tunggal.
Untuk menyalakan tampilan tujuh segmen, keluaran sistem digital
harus diubah ke dalam isyarat yang sesuai. Masukan dari sistem digital
biasanya dalam bentuk sandi biner (BCD) sehingga harus diubah menjadi
isyarat tujuh jalur untuk menyalakan masing-masing segmen. Perubahan ini
dilakukan oleh pengkode BCD ke tujuh segmen. Jika karakter 1 akan
ditampilkan, maka jalur keluaran B, C akan berlogika 1 untuk menghidupkan
LED yang sesuai dengan segmen B, C. Jalur yang lain tetap 0. Jika karakter 2
akan ditampilkan maka jalur keluaran A, B, D, E, G akan di-
set
berlogika 1
untuk menghidupkan LED yang sesuai dengan segmen A, B, D, E, G. Jalur
yang lain tetap berlogika 0. Jika karakter 3 akan ditampilkan maka jalur
keluaran A, B, C, D, G akan berlogika 1 untuk menghidupkan LED yang
sesuai dengan segmen A, B, C, D, G. Jalur yang lain tetap berlogika 0. Jika
karakter 4 akan ditampilkan maka jalur keluaran B, C, F, G akan berlogika 1
untuk menghidupkan LED yang sesuai dengan segmen B, C, F, G. Jalur yang
Tabel 2.3 Karakteristik masukan dan keluaran BCD
Masukan BCD
D
C
B
A
Keluaran BCD yang
diaktifkan
Desimal
0 0 0 0
A,B,C,D,E,F
0
0 0 0 1
B,C
1
0 0 1 0
A,B,D,E,G
2
0 0 1 1
A,B,C,D,G
3
0 1 0 0
B,C,F,G
4
0 1 0 1
A,C,D,F,G
5
0 1 1 0
A,C,D,E,F,G
6
0 1 1 1
A,B,C
7
1 0 0 0
A,B,C,D,E,F,G
8
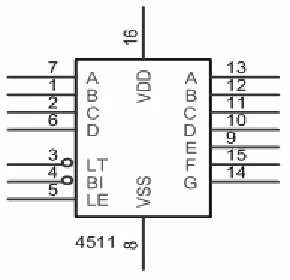
Contoh IC pengkode BCD ke tujuh segmen adalah IC 4511. IC
tersebut memiliki 4 masukan yang akan mengubah 4 bit masukan
tersebut menjadi 7 buah isyarat tujuh jalur. IC 4511 mempunyai
keluaran aktif berlogika 0. Gambar IC 4511 ditunjukkan pada Gambar
2.16.
Gambar 2.16 IC 4511
2.9 Penampil Tujuh Segmen
Salah satu bentuk tampilan digital adalah penampil tujuh segmen, yang
terdiri atas tujuh ruas LED di mana dapat di lihat pada gambar 2.17 [5].
a
b
f
g
c
e
Gambar 2.17 Tujuh ruas LED
Menurut cara pemberian tegangan maka suatu tujuh segmen terdiri
dari dua macam, yaitu
common
anoda dan
common
katoda. Perbedaan antara
keduanya hanya terletak pada penyambungan antara LED yang terdapat pada
segmen yang satu dengan yang lain. Pada
common
anoda, anoda dari ketujuh
LED terhubung menjadi satu (Gambar 2.18a) sedangkan pada
common
katoda, katoda dari ketujuh LED yang terhubung menjadi satu (Gambar
2.18b).
a)
Common A
noda
b)
Common
Katoda
Gambar 2.18 Untai penampil tujuh segmen
Gambar 2.19 Bentuk bilangan desimal tampilan tujuh segmen
Tabel 2.4 di bawah ini menunjukkan tabel segmen yang aktif untuk setiap
angka desimal.
Tabel 2.4 segmen yang aktif untuk setiap angka desimal
Desimal
Segmen yang aktif
0
1
2
3
4
5
6
7
8
9
A,B,C,D,E,F
B,C
A,B,D,E,G
A,B,C,D,G
B,C,F,G
A,C,D,F,G
A,C,D,E,F,G
A,B,C
A,B,C,D,E,F,G
2.10 Pengondisi Sinyal
Pengkondisi sinyal pada umumnya mencakup rangkaian penunjang
bagi tranduser[7]. Rangkaian ini dapat memberikan daya eksitasi, rangkaian
imbang, dan elemen kalibrasi. Pengkondisi sinyal digunakan untuk
memperkuat, memodifikasi, atau memilih bagian tertentu dari sinyal tersebut.
Salah satu contoh rangkaian pengkondisi sinyal yang sering digunakan adalah
rangkaian penguat
yang terdiri dari hambatan Ri dan Rf seperti ditunjukkan
pada gambar 2.20
Gambar 2.20 Rangkaian pengondisi sinyal
2.11 Tanggapan Sistem
Sebagian besar sistem kontrol adalah sistem wawasan waktu; yang
Respon sistem kontrol sering menunjukkan osilasi teredam sebelum mencapai
keadaan tunak. Dalam menentukan karakteristik tanggapan
system control
terhadap masukan tangga satuan, biasanya dicari parameter-parameter berikut:
1.
Waktu Tunda (
Delay Time
), t
dYaitu waktu yang diperlukan tanggapan mencapai setengah harga akhir
yang pertama kali.
2.
Waktu Naik (
Rise Time
), t
rYaitu waktu yang diperlukan tanggapan untuk naik dari 10% hingga 90%
dari harga akhirnya.
3.
Waktu Penetapan (
Settling Time )
, t
sYaitu waktu yang diperlukan kurva tanggapan dan menetap dalam daerah
disekitar harga akhir yang ukurannya ditentukan dengan persentase mutlak
dari harga akhir (biasanya 5% atau 2%).
4.
Waktu Puncak (
peak time
), t
pYaitu waktu yang diperlukan respon untuk mencapai puncak lewatan
pertamakali.
5.
Lewatan maksimum (
maximum overshoot
), M
pYaitu harga puncak maksimum dari kurva respon yang diukur dari satu.
Jika harga keadaan tunak respon tidak sama dengan satu, maka biasa
digunakan persen lewatan maksimum.
Persen lewatan maksimum =
100
%
)
(
)
(
)
(
×
∞
∞
−
c
c
t
c
p...(2.7)
Besarnya (persen) lewatan maksimum secara langsung menunjukkan
kestabilan relatif sistem.
Untuk mengetahui karakteristik tanggapan
system control
terhadap
masukan tangga satuan dapat ditunjukkan contoh pada gambar 2.21.
Gambar 2.21 Kurva respon tangga satuan yang menunjukkan
td, tr, tp,
Mp,
dan
ts
2.12 Metode Ziegler-Nichols
Ziegler-Nichols pertama kali memperkenalkan metodenya pada tahun
1942 [9]. Metode ini memiliki dua cara, metode osilasi dan kurva reaksi.
maksimum sebesar 25%. Gambar 2.22 memperlihatkan kurva respons tangga
satuan dengan lonjakan maksimum 25%.
Gambar 2.22 Kurva respons tangga satuan yang memperlihatkan 25%
lonjakan maksimum
Metode yang digunakan adalah metode kurva reaksi, di mana metode
kurva reaksi didasarkan terhadap reaksi sistem untaian terbuka.
Plant
sebagai
untaian terbuka dikenai sinyal fungsi tangga satuan, gambar 2.23
BAB III
PERANCANGAN
3.1 Diagram Blok.
Gambar 3.1 menunjukkan diagram blok perancangan pengendali suhu air
berbasis rangkaian digital.
Gambar 3.1 Diagram blok pengendali suhu air berbasis rangkaian digital
Pengendalian
suatu
plan
membutuhkan papan tombol sebagai pengontrol
manual. Papan tombol pengendali suhu air pada penelitian ini dirancang berisi :
tampilan
set point
,
output sensor, power, dan
saklar
set point
seperti ditunjukkan
Gambar 3.2 Papan tampilan dan
set point
3.2 Plan Pengendali Suhu Air.
Plan pengendali suhu air pada penelitian ini berupa
heater
yang
mempunyai
daya sebesar 300Watt dan menggunakan tegangan AC masukan sebesar 220Volt
.
Plan
heater
tersebut dapat ditunjukkan seperti gambar 3.3.
Tangki
air
Heater
air
220Vac
3.3 Sensor LM 35.
Sensor temperatur yang berjenis LM 35 memiliki konversi untuk setiap suhu
1ºC sama dengan tegangan ±10 mV. Sensor LM 35 ini bekerja dari suhu 0
oC sampai
dengan 100
oC. Sensor
temperature
LM35 merupakan salah satu sensor yang
mempunyai proporsional linear terhadap
oC. Konversi dari IC LM35 mengikuti
kaidah berikut: Setiap kenaikan suhu 1
oC, tegangan keluaran dari IC naik 10 mV.
Sebagai contoh: Pada suhu kamar 25
oC dan sensor LM 35 diberi tegangan 5 Volt
pada terminal-terminalnya ,maka tegangan keluarannya akan sebesar 250mV. Untuk
lebih jelas dapat ditunjukkan pada tabel 3.1. Sensor suhu LM35 menggunakan chip
silikon untuk elemen yang merasakan. Untuk
input
dan
output
tegangan pada sensor
suhu LM35 dapat ditunjukkan pada gambar 3.4.
Tabel 3.1 Konversi suhu ke tegangan pada sensorLM35
Suhu
Tegangan
(
oC}
(V)
28 0,288
29 0,298
30 0,308
31 0,318
32 0,328
33 0,338
34 0,348
35 0,358
36 0,368
37 0,378
38 0,388
39 0,398
40
0,408
41 0,418
42 0,428
43 0,438
44 0,448
45 0,453
46 0,462
47 0,475
48 0,486
49 0,499
50 0,505
51 0,516
52 0,527
53 0,534
54 0,545
55 0,554
56 0,563
57 0,574
58 0,582
59 0,593
60 0,6
61 0,612
62 0,621
3.4
Set point
Set point
berfungsi untuk menentukan batasan suhu air yang diinginkan.
Dalam perancangan rangkaian pendukung
set point
terdiri dari pembagi tegangan
dan
buffer
.
3.4.1 Pembagi Tegangan
Untuk mendapatkan nilai R
1dan R
2dengan V
outsesuai suhu yang
ditentukan dan tegangan catu sebesar 5 Volt, maka nilai R
1dan R
2dengan
mengacu persamaan 2.1 serta dari gambar 2.9 adalah sebagai berikut :
1.
Set Poin I : Suhu 40
oC dengan
output
tegangan 0,4V
Dipilih R2 = 1k
Ω
V
out=
Vcc
R
R
R
2 1
2
×
+
0,4V
=
x
V
k
R
k
5
1
1
1
+
Ω
Ω
0,08R
1+ 80
Ω
= 1k
Ω
R
1=
08
,
0
80
1
k
Ω
−
Ω
2.
Set poin II : Suhu 70
oC dengan
output
tegangan 0,7V
Dipilih R2 = 1k
Ω
V
out=
Vcc
R
R
R
2 1 2×
+
0,7 V
=
x
V
k
R
k
5
1
1
1
+
Ω
Ω
0,14R1+ 140
Ω
= 1 k
Ω
R
1=
14
,
0
140
1
k
Ω
−
Ω
=
6,14
k
Ω
3.
Set poin III : Suhu 90
oC dengan
output
tegangan 0,9V
Dipilih R2 = 1k
Ω
V
out=
Vcc
R
R
R
2 1 2×
+
0,9 V =
x
V
k
R
k
5
1
1
1
+
Ω
Ω
0,18R
1+ 180
Ω
= 1 k
Ω
R
1=
18
,
0
180
1
k
Ω
−
k
Ω
=
4,5
k
Ω
Bila nilai R
2masing-masing batasan suhu ditentukan 1 k
Ω
, maka nilai R
1Berhubung nilai resistor yang diperoleh tidak ada maka menggunakan resistor
variabel.
3.4.2 Buffer Tegangan
Untuk
mempertahankan
tegangan
output
agar tidak terbebani oleh
beban, maka tegangan keluaran perlu di
buffer
.
Berdasarkan
rangkaian
pendukung
set point
yaitu pembagi tegangan
dan
buffer
, maka rangkaian pembagi tegangan dan
buffer
dapat
dikonfigurasikan seperti pada gambar 3.6.
3.5 Antarmuka
Set Point
dengan ADC0804
Dalam aplikasinya antarmuka antara sensor suhu
set point
dengan ADC 0804
dapat ditunjukkan pada gambar 3.5. Nilai resistor dan kapasitor yang digunakan
sesuai dengan aplikasi ADC 0804 pada
datasheet
ADC 0804.
Gambar 3.6 Antarmuka set point dengan ADC 0804
3.6
Analog to Digital Converter
(ADC 0804)
ADC 0804 digunakan sebagai pengubah masukan analog menjadi keluaran
digital. ADC ini hanya membutuhkan dua komponen luar sebagai pembangkit
frekuensi (Clk R dan Clk In) yaitu sebuah hambatan dan sebuah kapasitor. Bila
maka
f
clockdan waktu konversi(Tc) dapat dihitung besarnya menggunakan persamaan
(2.2) dan (2.3).
f
clock=
pF
150
K
10
1
,
1
1
×
Ω
×
f
clock=
606 KHz
Tc =
fclock
1
=
KHz
606
1
=
1,6501
μ
s
Waktu konversi(Tc) yang dibutuhkan ADC untuk mengatur perubahan tiap bit
pada keluarannya sebesar 1,6501
μ
s. Pada sistem ini untuk ADC 0804 tegangan
referensi bawah yaitu: 0 Volt dimana keluaran dari ADC akan diubah menjadi 0000
0000, Dengan demikian tegangan referensi atas dapat diperoleh sesuai persamaan
(2.7) :
=
−
−
+
)
(
)
(
Vref
Vref
Resolusi . 255
)
(
+
Vref
= Resolusi . 255 +
Vref
(
−
)
= 19,6mV . 255 + 0
= 4,998 Volt
Maka tegangan referensi atas dapat diketahui sebesar 2,55 Volt. Maka besar
tegangan yang masuk ke kaki 9 (
Vref/
2) adalah:
Vref
Tegangan di atas dapat diperoleh dengan menggunakan rangkaian pembagi
tegangan sesuai dengan persamaan (2.1)
V
out=
2 1
2
R
R
R
+
V
cc; digunakan V
cc= 5 Volt
2 1
2
R
R
R
V
V
cc out
+
=
5
2,499
R
R
2 1
2
=
+
R
; dipilih R
2sebesar 10K
Ω
(R
1+10K
Ω
) 0,4998 = 10K
Ω
0,4998 R
1= 10K
Ω
– 499,8
Ω
=
9k5
Ω
R
1= 29,215
Ω
/0,255
= 19,007k
Ω
Karena resistor dengan nilai 19,007k
Ω
tidak dijumpai di pasaran maka dalam
perancangan ini digunakan resistor variabel.
Tegangan yang masuk ke kaki 7 (Vin
(-)) merupakan tegangan referensi bawah yakni
sebesar 0Volt. Berdasarkan perhitungan diatas maka dapat diperoleh rangkaian
seperti gambar 3.5 berikut.
Sesuai resolusi ADC pada
typical
ADC sebesar 19,6mV, maka dengan
persamaan 2.6 dapat diperoleh menjadi:
Level x Resolusi ADC = Tegangan konversi
Gambar 3.7 Rangkaian ADC
3.7 Antarmuka LM35 dengan ADC0804
Dalam aplikasinya antarmuka antara sensor suhu LM 35 dengan ADC 0804
dapat ditunjukkan pada gambar 3.8.
Nilai resistor dan kapasitor yang digunakan sesuai dengan aplikasi ADC 0804
pada
datasheet
ADC 0804 dimana resistor dan kapasitor tersebut berfungsi sebagai
pewaktu internal IC ADC 0804. Prinsip kerja dari IC ADC 0804 menggunakan
teknik aproksimasi suksesif atau metode pendekatan berturut-turut sehingga
mempunyai resolusi yang tinggi, yaitu 0,39 persen (
typical
pada
datasheet
). Misal
digunakan tegangan 5V maka kenaikan tegangannya menjadi 5V × 0,39 persen =
0,0195 Volt atau 0,02 Volt. Jadi, bila tegangan masukan sebesar 0,02 V, maka terjadi
hitungan biner 1 atau kenaikan biner bertambah 1.
3.8 Pembanding (
Comparator)
Sebagai Kontroler
Pengendali menggunakan pembanding (
comparator
). Pembanding
(
comparator
) akan membandingkan data yang masuk dari tombol (
set point
) dengan
keluaran dari sensor. Pembanding (
comparator
) yang digunakan dalam rancangan ini
adalah IC 74LS85. IC tersebut merupakan IC pembanding 4 bit. Cara pemakaian dari
IC 74LS85 ini adalah tampak pada Gambar 3.9. Keluaran dari pembanding sebelum
dihubungkan dengan
driver
(MOC 3021) akan dihubungkan dengan 2 buah gerbang
NAND dimana fungsi dari 2 buah gerbang tersebut untuk membalik keluaran dari
pembanding , yang kemudian mengendalikan pemanas (
Heater
) untuk memanaskan
Gambar 3.9 Gambar pembanding (komparator) 4 bit
3.9
Driver
Untuk mengatur ON/OFF pada
heater
, digunakan
triac
.
Triac
ini terhubung
langsung dengan pemanas / beban dan tegangan jala-jala PLN, 220 VAC, sehingga
diperlukan
isolator
antara rangkaian
driver
(MOC3021) dengan
triac
. MOC3021
merupakan
optoisolator
yang terdiri atas sebuah LED yang terhubung secara optis
dengan
triac
. Rangkaian
internal
IC MOC 3021 sebagai
driver
ini dapat dilihat pada
gambar 2.15.
MOC3021 dipilih berdasarkan kemampuan menahan tegangan ketika dalam
Driver
ini dapat dioperasikan untuk menahan tegangan sampai 400 VAC dan
memerlukan arus minimum sebesar 15 mA untuk membuatnya
ON
.
Antarmuka rangkaian
driver
(MOC3021) dengan
triac
dibentuk oleh
komponen resistor R6, MOC3021,
triac
, dan pemanas air 300 Watt sebagai beban.
Bagian masukan dari MOC3021 merupakan LED yang dinyala-padamkan oleh
pengendali dan mengalirkan arus melalui resistor R1, sehingga LED menyala.
Cahaya LED menyebabkan
triac
di bagian
output
MOC3021 menjadi
on
dan
mengalirlah arus
gate
triac
lewat R1, selanjutnya
triac
akan
on
dan pemanas mulai
bekerja.
Interfacing triac
dengan rangkaian MOC 3021 ditunjukkan dalam gambar
3.10.
Gambar 3.10
Interfacing triac
dengan rangkaian MOC 3021
Resistor R6 digunakan sebagai pembatas arus masukan LED. Led ini
memiliki batasan arus masukan antara 15 - 60 mA dan tegangan panjar maju kurang
R
6=
MOC
Iforward
MOC
Vforward
Vcc
_
_
-V forward = 1,5 -Volt (
datasheet
MOC)
I forward = 15 mA (
datasheet
MOC)
Menentukan nilai R6:
R
6maks =
mA
Vfd
Vcc
15
−
R
6=
mA
v
v
15
5
,
1
12
−
R
6= 700
Ω
Karena nilai resistor maksimal adalah 700
Ω
, sehingga didapatkan nilai
I
Forward_MOC= 15 mA.
Menentukan nilai R
1:
Vin(pk) = 220 X 2
Vin(pk) = 311,12 Volt
R
1=
ax
pk
Vin
Im
)
(
R
1=
2
,
1
126
,
311
3.10 Pengkode BCD ke Tujuh Segmen
Output
dari ADC selain digunakan sebagai masukan pada pembanding juga
digunakan sebagai masukan pada pengkode BCD ke tujuh segmen. Supaya dapat
membuat keluaran suatu pengkode BCD membentuk tujuh segmen tertentu menyala
sesuai dengan angka biner yang diterima, maka digunakan suatu IC 4511.
Output
ADC
pada pin 11-14 digunakan sebagai masukan untuk nilai puluhan,
Output
ADC
pada pin 15-18 digunakan sebagai masukan untuk nilai satuan.
Output
ADC
pin 11
sampai pin 14 dihubungkan ke masukan pengkode BCD ke tujuh segmen untuk nilai
puluhan pada pin 6, pin 2, pin 1 dan pin 7.
Output
ADC
pin 15 sampai pin 18
dihubungkan ke masukan pengkode BCD ke tujuh segmen untuk nilai satuan pada
pin 6, pin 2, pin 1 dan pin 7. Untuk lebih jelasnya dapat diperhatikan pada gambar
3.11.
IC 4511 hanya menggunakan masukan Vcc sebesar 5V dan untuk tiap ruas
keluaran pin 13, pin 12, pin 11, pin 10, pin9, pin 15 dan pin 14 pada pengkode BCD
diberi hambatan sebesar 120
Ω
sesuai
datasheet
. Tiap–tiap LED pada penampil tujuh
segmen menggunakan katoda bersama (
Common Katode
), karena IC 4511
mempunyai keluaran yang aktif berlogika 1.
3.11 Pengondisi Sinyal
Agar keluaran LM35 dapat diterima ADC0804 maka digunakan rangkaian
pengkondisi sinyal seperti gambar 3.12. Dari gambar tersebut maka perancangan
rangkaian pengkondisi sinyal meliputi perhitungan nilai R1 dan R2 menggunakan
persamaan (2.1).
Sedangkan dalam rangkaian penguat, digunakan rangkaian penguat
non
inverting.
Penguat ini digunakan karena keluaran dari rangkaian penguat
non
inverting
mempunyai keluaran nilai positif. Dengan menggunakan rangkaian penguat
non inverting
maka
penguatan sebesar 2 kali dapat diperoleh dengan perhitungan
sebagai berikut :
I F
R
R
1
+
=
A
;
A = penguatan (sebesar 2 kali), dipilih R
Isebesar 10 K
Ω
I F
R
R
1
=
−
A
R
F= (A -1).R
IDalam perancangan ini digunakan resistor variabel
(potentiometer)
untuk
mendapatkan resistansi dengan nilai 10k
Ω
.
Bab ini membahas perihal pengamatan atas implementasi rancangan
pengendali suhu berbasis rangkaian digital yang berupa pengujian perangkat
keras. Pengujian tersebut akan dilakukan pada setiap blok rangkaian. Agar dapat
mengetahui karakteristik tiap-tiap blok rangkaian perlu diketahui karakteristik
mulai dari transduser suhu, pengondisi sinyal, ADC, pembanding,
driver
dan pada
pengkode BCD ke tampilan tujuh segmen. Pengujian, pengamatan dan
pengambilan data dengan menggunakan multimeter digital dengan seri PC 510
dan Termometer air raksa
4.1 Perangkat Keras
Perangkat keras pengendali suhu air berbasis rangkaian digital terdiri dari
beberapa rangkaian diantaranya :
set point
, sensor suhu, ADC, pembanding,
Driver
,
plan
/heater, pengkode BCD ke tujuh segmen dan penampil. Perangkat
keras pengendali suhu air berbasis rangkaian digital dibuat supaya dapat
mengaplikasikan perancangan yang sesuai pada BAB III, dan kemudian diamati
serta dianalisa untuk mengetahui tingkat kesalahan yang terjadi antara
perancangan dengan hasil implementasi perangkat keras. Gambar perangkat keras
Gambar 4.1 Perangkat keras
4.1.1 Cara Kerja Perangkat Keras
Pertama kali masukkan nilai suhu air yang diinginkan melalui
set
point
yang ada kemudian tampilan
set point
akan berubah sesuai dengan
nilai suhu yang dimasukkan, sedangkan nilai sensor akan menunjukkan
nilai suhu air saat itu. Jika nilai pada tampilan sensor kurang dari nilai
pada tampilan
set point
, maka indikator lampu
heater
dan
plan
/pemanas
akan hidup. Jika nilai tampilan
set point
dan sensor sudah sama atau lebih
dari(
overshoot
), maka indikator lampu
heater
dan
plan
/pemanas akan mati
4.2 Hasil Pengujian Sistem
4.2.1 Pengujian
Set Point
40
oC
Tabel 4.1 diperoleh dari pengamatan pada tampilan suhu sensor,
tampilan suhu termometer, indikator
heater
dan mengukur waktu pada
setiap kenaikan suhu pada termometer.
Tabel 4.1 Hasil pengambilan data untuk
set point
40
oC
Waktu
(detik)
Tampilan
Suhu Sensor
(
oC)
Tampilan
Suhu
Termometer
oIndikator
Heater
Error
Tampilan
Suhu
0 28
28
ON
0,0000
30
29
29
ON
0,0000
42 30
33
ON
9,0909
55 31
34
ON
8,8235
63 32
34
ON
5,8823
71 33
35
ON
5,7142
86 34
35
ON
2,8571
97 35
36
ON
2,7777
126
36 37
ON
2,7027
133
37 37
ON
0,0000
147
38 38
ON
0,0000
152
39 39
ON
0,0000
164
40 43
OFF
6,9767
176
41 44
OFF
6,8181
182
42 44
OFF
4,5454
192
43 44
OFF
2,2727
204
44 44
OFF
0,0000
235
45 44
OFF
2,2727
260
44 43
OFF
2,3255
287
43 43
OFF
0,0000
308
42 42
OFF
0,0000
325
41 41
OFF
0,0000
336
40 41
OFF
2,4390
352
39 40
ON
2,5000
367
40 42
OFF
4,7619
382
41 42
OFF
2,3809
396
40 42
OFF
4,7619
416
39 41
ON
2,4390
Pada saat
set point
40
oC ditekan tampilan suhu sensor
menunjukkan nilai 40
oC dan tampilan suhu termometer menunjukkan suhu
awal air 28
oC.
Berdasarkan data dari tabel 4.1 dapat diperoleh gambar 4.2 yang
menunjukkan grafik hubungan antara suhu keluaran sensor berbanding
dengan lama waktu
heater
pada saat memanaskan air dari suhu awal air
dengan kenaikan suhu tiap 1
oC sampai kira-kira stabil sesuai
set point
suhu 40
oC.
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
0
50
100 150 200 250 300 350 400 450
Waktu (detik)
s
uhu
(o
C
)
Gambar 4.2 Grafik hubungan antara waktu dan suhu untuk
set point
40
oC
Dari grafik gambar 4.2 dapat diketahui, bahwa sistem mengalami
overshoot
hal tersebut disebabkan oleh masih adanya sisa pemanasan air
yang tidak merata. Suhu maksimal mencapai sebesar 45
oC, sedangkan
Dari hasil implementasi diperoleh hasil yang stabil sesuai dengan
toleransi yang diizinkan (±5%), dengan karakteristik sebagai berikut:
a.
t
d= t
50%- t
0%=t{28
oC + 50%(40
oC - 28
oC)}- t{0}
= t 34
oC
= ±86 detik
b. t
r= t
90%- t
10%- t
90%= t{28
oC + 90%(40
oC - 28
oC)}
= t 38,8
oC
= ±150 detik
- t
10%= t{28
oC + 10%(40
oC - 28
oC)}
= t 29,2
oC
= ±30detik
maka nilai t
r= ±150 detik - ±30detik
= ±120 detik
c.
t
s= 28
oC + 98%(40
oC - 28
oC)}
= t 39,76
oC
= ±362 detik
d.
Overshoot
yang terjadi sebesar (M
p)
100
%
40
40
45
x
−
=
100
%
40
5
x
=
e.
Error steady state =
100
41
39
41
−
×
%
= 4,8780 %
Dari karakteristik performansi yang dinyatakan dalam bentuk
kawasan waktu yang diperoleh di atas, dapat dikatakan bahwa sistem dapat
menunjukkan respon waktu yang dapat diterima. Hal itu dapat ditunjukkan
pada saat
overshoot
yang terjadi kurang dari 25%(
metode Ziegler-Nichols
)
yaitu sebesar 12,5% dengan
Error steady state
sebesar 4,8780 %. Di
samping itu diperoleh nilai t
d= ±86detik
,t
r= ±120detik
,t
s= ±362 detik,
nilai tersebut dicari supaya dapat mengetahui tanggapan
system control
terhadap tangga satuan(pada bab III), dalam hal ini saat sistem
mengendalikan suhu air 40
oC.
Sehingga didapatkan gambar 4.3 yang menunjukkan letak dari
rise
time, delay time
dan
settling time
.
28 29 30 31