Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun Oleh :
ANTONIUS ADI NUGROHO NIM : 025114059
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
WATER LEVEL CONTROLLER
BASED ON DIGITAL CIRCUIT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Antonius Adi Nugroho Student Number : 025114059
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
PENGENDALI KETINGGIAN AIR
BERBASIS RANGKAIAN DIGITAL
(
WATER LEVEL CONTROLLER BASED ON DIGITAL
CIRCUIT
)
Disusun oleh
Antonius Adi Nugroho NIM : 025114059
Telah disetujui oleh :
Dosen Pembimbing I
(B. Wuri Harini, S.T., M.T.) Tanggal :_____________________
Dosen Pembimbing II
(Ir. Tjendro) Tanggal:_____________________
HALAMAN PENGESAHAN
PENGENDALI KETINGGIAN AIR BERBASIS RANGKAIAN
DIGITAL
Dipersiapkan dan disusun oleh :
Antonius Adi Nugroho NIM : 025114059
Telah dipertahankan di depan Panitia Penguji Pada tanggal : 17 Oktober 2007
dan dinyatakan memenuhi syarat
Susunan Panitia Penguji
Nama Lengkap Tanda Tangan
Ketua : Martanto, S.T., M.T. ...
Sekretaris : B. Wuri Harini, S.T., M.T. ...
Anggota : Damar Widjaja, S.T., M.T. ...
Anggota : Ir. Tjendro ...
Yogyakarta, November 2007 Fakultas Sains dan Teknologi Universitas Sanata Dharma
Dekan
Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M. Sc.
life full of problem in details
there is liking is sorrowful
don't have ever surendered
there no stain don't learn
Kupersembahkan Karya ini :
Unt uk Tuhan Yesus Kr i st us
Unt uk Bapak, Ibu, mbak Ika, Eyang kakung dan Al m Eyang Ut i yang sangat kuci nt ai
Unt uk Semua t eman dan sahabat ku
Ter i makasi h at as segal a kesabar an dan ci nt a kasi h yang sel al u di ber i kan pada penul i s.
Pengendali Ketinggian Air Berbasis Rangkaian Digital
Nama : Antonius Adi Nugroho NIM : 025114059
INTISARI
Dalam tugas akhir ini akan dipaparkan tentang Sistem Pengendali Ketinggian Air Berbasis Rangkaian Digital yang dapat digunakan untuk mengatur ketinggian air dengan mengaplikasikan rangkaian digital. Rangkaian Pengendali Ketinggian Air Berbasis Rangkaian Digital ini terdiri dari beberapa bagian utama yaitu : (1) sensor, (2) rangkaian set point, (3) rangkaian pengondisi sinyal, (4) pengubah tegangan analog ke digital, (5) komparator, (6) kontroler, (7) penggerak, (8) plan (dua buah tangki), dan (9) rangkaian penampil.
Pengendali Ketinggian Air Berbasis Rangkaian Digital diimplementasikan dengan menggunakan sistem kalang tertutup. Masukan untuk pengendali adalah hasil selisih antara set point dengan keluaran sensor, selisih tersebut nantinya digunakan untuk mengendalikan pompa air agar hidup atau mati. Pada penerapan alat ini, pengendalian ketinggian air dibatasi dengan nilai set point yaitu 3 cm, 5 cm, 7 cm, dan 9 cm. Dalam pemilihan set point digunakan 4 buah saklar yang tiap-tiap saklar memiliki nilai yang berbeda-beda.
Pada saat dilakukan pengujian dapat diketahui bahwa sistem stabil dan telah bekerja dengan baik sesuai dengan perancangan. Diperoleh hasil yang memiliki nilai steady-state error sebesar 4,44%, akan tetapi nilai tersebut masih dalam batas nilai toleransi yang diijinkan.
Kata kunci : ketinggian air, rangkaian digital, pengendali
ABSTRACT
This final project will describe Water Level Controller based on digital circuit. The electronic circuit of Digital Connecting Structure-based Water Level Controller System is divided into several main parts: (1) sensor, (2) set point, (3) signal conditioning, (4) analog to digital converter, (5) comparator, (6) controller, (7) actuator, (8) plant, and (9) display.
Water Level Controller based on digital circuit was implemented with close-loop system. The input controllers are the different between set point and sensor’s output. That different will used to controlled water pump condition. In application’s project, water level controller uses set point’s values are 3 cm, 5 cm, 7 cm and 9 cm. to choose set point’s value used 4 selections button that have different value.
During testing the project will known that the system is constant and worked properly with the design project. This final project has got steady-state error value 4, 44 %, but the value was tolerated.
Keyword: water level, digital circuit, controller.
HALAMAN PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, Oktober 2007
Antonius Adi Nugroho
kasih karunia, anugerah, dan berkat-Nya, sehingga penulis dapat menyelesaikan
penulisan tugas akhir ini dengan baik.
Penulis menyadari bahwa dalam penulisan tugas akhir ini, penulis
mendapatkan banyak bantuan dan dorongan dari berbagai pihak. Oleh karena itu,
pada kesempatan ini dengan segala kerendahan hati dan penuh hormat, penulis
ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC selaku Dekan
Fakultas Teknik Universitas Sanata Dharma Yogyakarta.
2. Bapak A. Bayu Primawan, S.T., M.Eng selaku Ketua Jurusan Teknik
Elektro Universitas Sanata Dharma Yogyakarta.
3. Ibu B. Wuri Harini, S.T., M.T. dan Ir. Tjendro selaku pembimbing I
dan II atas segala pemikiran, waktu dan tenaganya dalam membimbing
dan mengarahkan penulis dari awal hingga akhir.
4. Seluruh dosen Teknik Elektro yang tidak dapat di sebutkan satu
persatu, yang telah mendidik dan membimbing penulis selama
5. Seluruh Staf & Laboran Teknik Elektro Universitas Sanata Dharma
yang sudah memberikan bantuan selama proses pembuatan karya tugas
akhir ini.
6. Kedua orang tua penulis yang telah memberikan doa, dorongan moril
maupun material, kasih dan kesabaran yang tak pernah putus sehingga
penulis dapat menyelesaikan tugas akhir ini.
7. Kakakku Ika yang telah memberi doa dan dukungan penulis dalam
menyelesaikan tugas akhir ini.
8. Ma Prend in da MARCOPOLO : Gepenk, Memet, Bhule, Andex, Deri,
Nango, Lambe, Ahok, Nonox, Denny, Nova. I Love U ALL!!
9. Keluarga besar Pak Wakidi dan alm Ibu, Iksan, mas Yudi dan
keluarga, terima kasih sudah menerima penulis dan berhubungan baik
dengan penulis.
10.Pembimbing III-ku : Nangok dan Wawan terimakasih atas waktu dan
pemikiran yang telah banyak membantu penulis selama proses
penulisan tugas akhir ini.
11.Teman-teman teknik Elekro’02: Kobo, Sumanto, Erik, Oscar, Iyok,
Roby, Koh Andis, Sinung, Lele, Hari, Koten, Ido, Danny, Denny,
Yoga. Selalu semangat teman!!
12.Teman-teman mahasiswa jurusan Teknik Elekro dan semua pihak
yang tidak dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan
dari penulisan tugas akhir ini. Oleh karena itu segala kritik dan saran yang
bersifat membangun sangat penulis harapkan.
Yogyakarta, Oktober 2007
Penulis
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN... iv
HALAMAN MOTTO DAN PERSEMBAHAN... v
INTISARI ... vi
ABSTRACT ... vii
HALAMAN PERNYATAAN KEASLIAN KARYA ... viii
KATA PENGANTAR... ix
DAFTAR ISI... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xix
BAB I PENDAHULUAN ... 1
1.1 Judul ... 1
1.2 Latar Belakang ... 1
1.3 Tujuan dan Manfaat ... 2
1.4 Perumusan Masalah ... 3
1.5 Batasan Masalah ... 3
1.6 Metodologi Penelitian ... 4
1.7 Sistematika Penulisan... 5
2.3 ADC (Analog to Digital Converter)... 8
2.3.1 Parameter ADC ... 9
2.4 Gerbang-gerbang Logika... 10
2.4.1 Gerbang AND ... 11
2.4.2 Gerbang OR ... 12
2.4.3 Gerbang NOT ... 13
2.4.4 Gerbang NAND ... 14
2.4.5 Gerbang NOR ... 15
2.5 Pembanding ... 17
2.6 Triac... 19
2.7 Penggerak ( Driver ) Motor... 21
2.8 Optoisolator ... 21
2.9 Peraga LED Tujuh Segmen... 22
2.10 Penggerak/Pengkode BCD-ke-Tujuh Segmen ... 23
2.11 Buffer Tegangan ... 24
2.12 Differential Amplifier (Penguat Selisih)... 24
2.13 Non inverting Ampilfier ... 25
2.14 Tanggapan Sistem ... 25
BAB III PERANCANGAN ... 28
3.1 Diagram Blok ... 28
3.2 Plant Pengendali Ketinggian Air ... 28
3.3 Sensor Ketinggian Air ... 29
3.4 Rangkaian Pengkondisi Sinyal... 31
3.5 Set Point ... 35
3.6 ADC 0804 ... 36
3.7 Rangkaian Kontroler ... 37
3.8 BCD to 7 segment... 38
BAB IV HASIL DAN PEMBAHASAN... 40
4.1 Cara Kerja dan Cara Pengoperasian Alat ... 40
4.2 Data Pengamatan ... 41
4.2.1 Data Pengamatan untuk Set Point 1 ... 43
4.2.2 Data Pengamatan untuk Set Point 2 ... 45
4.2.3 Data Pengamatan untuk Set Point 3 ... 48
4.2.4 Data Pengamatan untuk Set Point 4 ... 51
4.2.5 Data Pengamatan untuk Set Point 1 (Sistem dikenai gangguan) ... 55
4.2.6 Data Pengamatan untuk Set Point 2 (Sistem dikenai gangguan) ... 58
4.2.7 Data Pengamatan untuk Set Point 3 (Sistem dikenai gangguan) ... 61
4.3 Pengamatan Keluaran ADC dan Set Point ... 68
4.3.1 Perbandingan Data Pengukuran ADC dengan Perancangan 70 4.3.2 Perbandingan Pengamatan Perancangan dan Plant ... 70
4.4 Pengamatan Rangkaian Pembanding ... 71
4.5 Pengamatan Driver Motor... 72
BAB V PENUTUP ... 73
5.1 Kesimpulan ... 73
5.2 Saran ... 73
DAFTAR PUSTAKA
LAMPIRAN
DAFTAR GAMBAR
Gambar 2.1. Diagram blok sistem kontrol ... 6
Gambar 2.2.a Simbol Potensiometer ... 8
Gambar 2.2.b Perbandingan hambatan RA dan RB pada potensiometer ... 8
Gambar 2.3 Gerbang AND ... 12
Gambar 2.4 Gerbang OR ... 13
Gambar 2.5 Gerbang NOT ... 13
Gambar 2.6 Gerbang NAND ... 14
Gambar 2.7 Gerbang NOR ... 16
Gambar 2.8 Simbol logika standar gerbang XOR dua masukan ... 17
Gambar 2.9 Pembanding 4 bit menggunakan gerbang XOR ... 18
Gambar 2.10 IC 74LS85... 19
Gambar 2.11 Bentuk fisik triac... 19
Gambar 2.12 Kurva karakteristik triac... 20
Gambar 2.13 Konfigurasi dari MOC302X ... 22
Gambar 2.14 Peraga LED tujuh segmen ... 22
Gambar 2.15 Bentuk bilangan desimal tampilan tujuh segmen ... 23
Gambar 2.16 Diagram blok pendekode ... 23
Gambar 2.17 Masukan desimal dari papan tombol(keyboard) ke suatu kode BCD 8421 ... 24
Gambar 2.18 Konfigurasi buffer tegangan ... 24
Gambar 2.19 Rangkaian Differential Amplifier... 24
Gambar 2.22 Gambar steady-state error (ess) ... 27
Gambar 3.1 Diagram blok perancangan pengendali ketinggian air ... 28
Gambar 3.2 Plant ketinggian air... 29
Gambar 3.3 Rangkaian sensor ... 30
Gambar 3.4 Grafik tegangan keluaran terhadap ketinggian air... 31
Gambar 3.5 Rangkaian Pengondisi Sinyal ... 34
Gambar 3.6 Rangkaian ADC... 34
Gambar 3.7 Rangkaian set point... 36
Gambar 3.8 Kaki-kaki IC ADC 0804 ... 37
Gambar 3.9 IC 74LS85 sebagai kontroler ... 38
Gambar 3.10 BCD to 7 segment dan 7 segmen ... 39
Gambar 4.1 Perangkat Keras Pengendali Ketinggian Air Berbasis Rangkaian Digital ... 40
Gambar 4.2 Tampilan set point 1 saat saklar 1 diaktifkan ... 43
Gambar 4.3 Grafik ketinggian air terhadap waktu untuk set point 3 cm. 44 Gambar 4.4 Tanggapan sistem untuk set point 1 (3 cm) ... 44
Gambar 4.5 Tampilan set point 2 saat saklar 2 diaktifkan ... 46
Gambar 4.6 Grafik ketinggian air terhadap waktu untuk set point 5 cm. 47 Gambar 4.7 Tanggapan sistem untuk set point kedua (5cm) ... 47
Gambar 4.8 Tampilan set point 3 saat saklar 3 diaktifkan ... 49
Gambar 4.9 Grafik ketinggian air terhadap waktu untuk set point 7 cm. 50
Gambar 4.10 Tanggapan sistem untuk set point 3 (7 cm) ... 50
Gambar 4.11 Tampilan set point 4 saat saklar 4 diaktifkan ... 52
Gambar 4.12 Grafik ketinggian air terhadap waktu untuk set point 9 cm. 53
Gambar 4.13 Tanggapan sistem untuk set point 4 (9cm) ... 53
Gambar 4.14 Grafik ketinggian air terhadap waktu untuk set point 3 cm. 56
Gambar 4.15 Tanggapan sistem untuk set point 1 (3cm) ... 57
Gambar 4.16 Grafik ketinggian air terhadap waktu untuk set point 5 cm. 59
Gambar 4.17 Tanggapan sistem untuk set point 2 (5 cm) ... 60
Gambar 4.18 Grafik ketinggian air terhadap waktu untuk set point 7 cm. 62
Gambar 4.19 Tanggapan sistem untuk set point 3 (7 cm) ... 62
Gambar 4.20 Grafik ketinggian air terhadap waktu untuk set point 9 cm. 65
Gambar 4.21 Tanggapan sistem untuk set point 4 (9 cm) ... 66
Tabel 2.2 Tabel kebenaran gerbang OR ... 13
Tabel 2.3 Tabel kebenaran gerbang NOT... 14
Tabel 2.4 Tabel kebenaran gerbang AND dan gerbang NAND ... 15
Tabel 2.5 Tabel kebenaran gerbang OR dan gerbang NOR ... 17
Tabel 2.6 Tabel kebenaran XOR dua masukan ... 18
Tabel 2.7 Segmen yang aktif untuk setiap angka desimal ... 23
Tabel 3.1 Data pengukuran awal ... 30
Tabel 3.2 Tegangan keluaran rangkaian pengkondisi sinyal ... 31
Tabel 3.3 Tabel ketinggian air dan keluaran digital ... 35
Tabel 4.1 Perbandingan keluaran sensor pada saat perancangan dan keluaran sensor pada perangkat keras... 42
Tabel 4.2 Pengamatan untuk Set Point 3 cm ... 43
Tabel 4.3 Pengamatan untuk Set Point 5 cm ... 46
Tabel 4.4 Pengamatan untuk Set Point 7 cm ... 49
Tabel 4.5 Pengamatan untuk Set Point 9 cm ... 52
Tabel 4.6 Data Delay Time, Rise Time, Settling Time dan Steady-state Error... 54
Tabel 4.7 Pengamatan untuk Set Point 3 cm ... 56
Tabel 4.8 Pengamatan untuk Set Point 5 cm ... 59
Tabel 4.9 Pengamatan untuk Set Point 7 cm ... 61
Tabel 4.10 Pengamatan untuk Set Point 9 cm ... 64
Tabel 4.11 Data Delay Time, Rise Time, Settling Time dan Steady-state Error dengan sistem dikenai gangguan ... 67
Tabel 4.12 Hasil pengambilan data ADC untuk setiap perubahan kenaikan nilai ... 69
Tabel 4.13 Keluaran set point... 69
Tabel 4.14 Perbandingan ADC ... 70
Tabel 4.15 Perbandingan perancangan dengan plant... 71
Tabel 4.16 Keluaran IC pembanding 74ls85 ... 71
Tabel 4.17 Masukan dan keluaran rangkaian driver... 72
1.1. Judul
Pengendali Ketinggian Air Berbasis Rangkaian Digital
1.2. Latar Belakang Masalah
Air memegang peranan penting dalam kehidupan manusia sehari-hari. Air
tidak hanya digunakan sebagai air minum tetapi juga digunakan untuk keperluan
lainnya, seperti mandi, memasak mencuci dan sebagainya. Mengingat pentingnya
air bagi kehidupan manusia, banyak rumah-rumah menggunakan tangki
penampungan air. Pada umumnya tangki penampungan air ini diletakkan pada
sebuah tempat yang lebih tinggi, sehingga dibutuhkan sebuah pompa air untuk
mengisi tangki tersebut. Hal ini sering menimbulkan masalah ketika hendak
mengisi tangki tersebut karena kita tidak dapat mengetahui dengan pasti volume
air yang sudah berada dalam tangki. Seringkali air yang dimasukkan sudah
melewati batas daya tampung tangki sehingga banyak air yang terbuang sia-sia.
Hal ini tidak saja menyebabkan pemborosan penggunaan air tetapi juga
pemborosan biaya listrik yang harus dikeluarkan untuk mengaktifkan pompa air.
Untuk mensiasati hal tersebut diperlukan sebuah sistem pengendalian secara
otomatis.
Pengendalian adalah sebuah proses pengaturan baik itu alat, produksi,
hasil produksi, dan lain-lain sehingga dapat bekerja secara efektif dan efisien.
Sistem pengendalian ini berhubungan erat dengan kinerja semua unsur yang ada
2
dalam dunia industri. Efisiensi produksi umumnya dianggap sebagai kunci sukses.
Efisiensi produksi meliputi area yang luas, antara lain mengurangi kontrol
manual yang dilakukan oleh manusia (otomatisasi dan mesinisasi produksi),
mempertinggi laju produksi, menurunkan biaya produksi.
Salah satu proses pengendali elektronis adalah pengendali ketinggian
permukaan air menggunakan rangkaian digital. Pengendalian ketinggian air dalam
suatu bak air ini meliputi beberapa komponen penting, yaitu: pompa air, bak air,
sensor ketinggian air, dan kran pembuangan. Pengendalian ketinggian air dengan
rangkaian digital ini merupakan pengendali dengan kalang tertutup. Untuk itulah
dalam tugas akhir ini, penulis menyajikan sebuah alat yang berfungsi untuk
mengatur tingkat ketinggian air dengan basis rangkaian digital. Rangkaian ini
memudahkan kita untuk mengatur tingkat ketinggian air dengan menggunakan
tombol atau saklar. Penulis memberi judul “Pengendali Ketinggian Air Berbasis
Rangkaian Digital”.
1.3. Tujuan dan Manfaat
Adapun tujuan pembuatan alat ini yaitu mengendalikan ketinggian air
berbasis rangkaian digital.
Adapun manfaat dari pembuatan alat ini adalah:
a. Penulis dapat membuat rangkaian pengendali dengan
gerbang-gerbang logika digital dasar.
b. Sebagai alat bantu pengendali ketinggian otomatis air pada tangki
1.4. Perumusan masalah
Dengan melihat tujuan dan latar belakang yang ada, maka permasalahan
yang dapat dirumuskan pada pembuatan alat ini adalah sebagai berikut:
a. Apakah pengendali ketinggian air yang dibuat dengan rangkaian
digital ini akan memiliki tingkat keakuratan yang tinggi?
b. Apakah pemilihan komponen yang tepat dalam proses perancangan
akan mempengaruhi keakuratan pengendalian dalam praktek?
c. Apakah sistem yang dirancang dapat bekerja dengan baik?
1.5. Batasan Masalah
Alat yang digunakan sebagai penampil dan pengendali ketinggian air ini
mempunyai batasan-batasan sebagai berikut:
a. Sistem menggunakan dua tangki, tangki 1 sebagai sumber dan
tangki 2 sebagai obyek yang dikendalikan.
b. Sistem menggunakan potensiometer sebagai sensor ketinggian air.
c. Sistem menggunakan kran air yang dikendalikan secara manual
untuk mengurangi volume air pada tangki 2.
d. Sistem menggunakan 4 set point sebagai batas sensor ketinggian
air.
e. Aktuator yang digunakan dalam sistem adalah pompa air.
f. Sistem mengunakan rangkaian digital dengan gerbang-gerbang
logika digital dasar sebagai pengendali.
4
1.6. Metodologi Penelitian
Metodologi yang digunakan untuk menyelesaikan permasalahan dalam
pembuatan alat yaitu:
a. Pengumpulan data dan informasi baik itu dari internet maupun
perpustakaan yang berhubungan dengan alat yang akan dibuat yang
nantinya diharapkan dapat membantu dalam proses-proses
selanjutnya.
b. Perancangan plant. Pembuatan perencanaan miniatur dari alat yang
akan dibuat. Dalam perancangan plant ini gambar dibuat dengan
komputer kemudian dibuat secara nyata.
c. Pengambilan data plant. Pengambilan data pada plant ini
berhubungan dengan set point sensor yang akan digunakan dalam
perancangan, sehingga set point yang dirancang sesuai dengan
yang diinginkan.
d. Perancangan kendali. Dalam perancangan kendali berhubungan
dengan pembuatan rangkaian digital yang akan digunakan sebagai
pengendali sistemnya. Perancangan rangkaian digital menggunakan
software Microcap 8.0 dan Orcad 9.0.
e. Implementasi.
f. Pengujian.
1.7. Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini adalah sebagai berikut :
BAB I Pendahuluan
Bab ini berisi tentang latar belakang masalah, tujuan dan
manfaat dari penelitian, batasan masalah, metodologi
penelitian, serta sistematika penulisan
BAB II Dasar Teori
Bab ini berisi tentang dasar teori yang digunakan untuk
membuat Pengendali suhu air yang disertai dengan
penjelasan.
BAB III Rancangan Penelitian
Bab ini berisi tentang rancangan peralatan yang dibuat,
pemilihan komponen, serta penjelasan singkat tentang cara
kerja peralatan.
BAB IV Hasil dan Pembahasan
Bab ini berisi tentang pembahasan dan analisis mengenai
hasil penelitian yang telah dilaksanakan.
BAB V Kesimpulan dan Saran
Bab ini berisi tentang kesimpulan dan spesifikasi peralatan
yang dibuat serta saran-saran untuk perbaikan alat dan
BAB II
DASAR TEORI
II.1 Sistem Kontrol
Sistem kontrol tidak dapat dilepaskan dari kehidupan masyarakat
modern. Peranannya dapat terlihat mulai dari peluncuran roket, penerbangan
pesawat ulang-alik, pengaturan kerja mesin-mesin di pabrik, sampai
pemakaian alat-alat elektronik rumah tangga.
Pembahasan sistem kontrol dengan umpan balik lazimnya
menyangkut lima elemen dasar, seperti terlihat pada diagram blok gambar
2.1. Kelima elemen itu ialah: variabel input sebagai referensi (R); variabel
output yang dikontrol (C); pengukuran output dan umpan balik pada input
(H); elemen pembanding (E); serta elemen pengontrol (G). Analisis
matematis teori kontrol menggunakan fungsi alih untuk membahas kelakuan
atau respons sistem, dengan cara membandingkan nilai sinyal output (C)
dengan sinyal input-nya (R) [1].
G
∑
H
C R
Gambar 2.1. Diagram blok sistem kontrol.
II.2 Transduser dan Sensor
Transduser adalah alat yang mengubah energi dari satu bentuk ke bentuk
yang lain. Transduser dapat dibagi menjadi dua kelas: transduser input dan
transduser output.
Sensor adalah alat yang digunakan untuk mendeteksi dan sering berfungsi
untuk mengukur magnitude sesuatu. Sensor adalah jenis transduser yang
digunakan untuk mengubah variasi mekanis, magnetis, panas, sinar dan kimia
menjadi tegangan dan arus listrik.
Salah satu komponen elektronika yang dapat digunakan sebagai transduser
posisi hambatan adalah potensiometer. Potensiometer adalah suatu hambatan yang
dapat diubah nilai resistansinya dengan cara mekanik (memutar/menggeser).
Potensiometer terdiri atas sebuah jalur atau track yang mempunyai resistansi
menyeluruh yang konstan dengan sebuah penyapu (wiper) yang dapat bergerak
sambil tetap bersentuhan dengan jalur atau track.
Ada dua macam potensiometer yang biasa digunakan dalam elektronika, yaitu:
1. Potensiometer yang hambatannya berubah sesuai dengan skala logaritmis.
2. Potensiometer yang hambatannya berubah sesuai dengan skala linear.
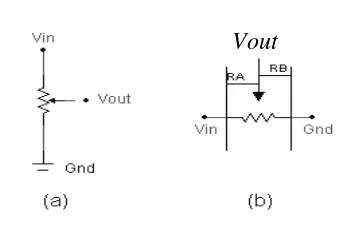
Pada rangkaian elektronika potensiometer memiliki lambang, seperti pada
8
Gambar 2.2 (a) Simbol potensiometer, (b) Perbandingan hambatan RA dan RB
pada potensiometer.
Besarnya tegangan keluaran Vout pada potensiometer ditentukan oleh
perbandingan RA dan RB seperti pada persamaan (2.1) di bawah ini yang sesuai
dengan gambar 2.2 (b) [2].
Vout = Vin x
RB RA
RA +
Vout
(2.1)
II.3 ADC (Analog to Digital Converter)
Salah satu komponen penting dalam sistem akuisisi data adalah pengubah
besaran analog ke digital atau disebut juga ADC (Analog to Digital Converter).
Pengubah ini akan mengubah besaran-besaran analog menjadi bilangan-bilangan
digital sehingga bisa diproses dengan komputer. Peranan pengubah ini menjadi
semakin penting karena sekarang sudah bisa didapatkan komputer-komputer yang
"real time". Perubahan-perubahan satuan fisis bisa dengan cepat ditanggapi oleh
komputer.
Contoh aplikasi ADC ini bisa kita lihat misalnya pada voltmeter digital,
sampling suara dengan komputer, sehingga suara dapat disimpan secara digital
Konsep pengubah analog ke digital ini adalah sampling (mengambil
contoh dalam waktu tertentu) kemudian mewakilinya dengan bilangan digital
dengan batas yang sudah diberikan.
II.3.1 Parameter ADC
Kuantitas penting dalam ADC adalah rentang tegangan terkecil
yang tidak dapat mengubah hasil konversi. Rentang tegangan ini sering
disebut dengan Minimal Representable Voltage (MRV) atau LSB,
MRV = LSB = FS / 2
n (2.2)dengan LSB menunjukkan nilai analog dari suatu Least Significant Bit
(LSB), dan FS (Full Scale) adalah nilai maksimum dari tegangan referensi.
Karena semua tegangan dalam jangkauan ini diwakili oleh bilangan biner
yang sama, maka akan terdapat ketidakpastian konversi sebesar ± LSB
untuk setiap pengubahan. Masalah ini dapat dikurangi dengan menambah
jumlah bit pada output pengubah.
Output maksimum suatu ADC tidak berada pada nilai FS akan
tetapi pada 7/8 FS. Misalkan sebuah ADC 3 bit ideal, akan mempunyai
LSB sebesar 1/8 FS. Jangkauan input akan dikuantisasikan pada delapan
tingkat dari 0 sampai 7/8 kali FS.
Terdapat berbagai cara mengubah sinyal analog ke digital, dalam
pekerjaan ini dipakai metode pendekatan berturutan atau succesive
approximation. Karena ADC dengan jenis ini sudah banyak di pasaran
10
didasari pada pendekatan sinyal input dengan kode biner dan kemudian
berturut-turut memperbaiki pendekatan ini untuk setiap bit pada kode
sampai didapatkan pendekatan yang paling baik. Untuk meyimpan kode
biner pada setiap tahapan dalam proses digunakan Succesive
Approximation Register (SAR).
Konversi diawali dari Most Significant Bit (MSB) diset tinggi, ini
identik dengan memperkirakan nilai input adalah FS. Komparator akan
membandingkan output DAC (Digital to Analog Converter) dengan
tegangan input dan memerintahkan pengendali untuk mematikan MSB jika
perkiraan mula-mula ternyata lebih besar dari tegangan input. Pada periode
clock selanjutnya pengendali menyalakan MSB berikutnya, kemudian
kembali membandingkan output dari DAC dengan sinyal input. Proses ini
terus diulang sampai pada LSB. Setelah sampai pada tahap ini nilai
konversi yang berada pada SAR adalah pendekatan yang terbaik dari
sinyal input. Dalam proses ini diambil asumsi bahwa sinyal input konstan
selama konversi [3].
II.4 Gerbang-gerbang Logika
Gerbang logika adalah rangkaian yang menggunakan sinyal digital sebagai
masukan dan keluarannya. Hal yang membuat rangkaian disebut sebagai gerbang
adalah bahwa setiap keluaran tergantung sepenuhnya pada sinyal yang diberikan
pada masukan-masukannya. Jika sinyal ini berubah, maka keluarannya juga
Rangkaian digital yang menggunakan gerbang logika biasanya disusun
sehingga keluarannya berlogika 1 hanya jika masukan terdapat sinyal masukan
dalam kombinasi tertentu. Itu sebabnya rangkaian ini kadang-kadang disebut
dengan rangkaian logika kombinasional.
Kerja suatu rangkaian logika kombinasi standar, atau rangkaian apa saja
yang dibuat dari unit-unit ini dapat digambarkan dengan dua cara. Salah satu cara
ialah dengan menggunakan tabel kebenaran. Tabel kebenaran ini memperlihatkan
keluaran yang diharapkan dari setiap kemungkinan kombinasi masukan, sehingga
kerja rangkaian dapat segera diteliti. Cara lain adalah dengan aljabar Boole.
Metoda ini jauh lebih ringkas, tetapi tidak begitu mudah dipahami oleh pemula.
Aljabar Boole sudah ditemukan jauh sebelum komputer modern. Namanya
diambil dari ilmuwan George Boole (1815-1864) yang merancangnya sebagai
suatu metoda untuk mengubah pernyataan logika menjadi pernyataan aljabar.
Tidak banyak manfaat yang dapat diambil dari karya ini, sampai tahuin 1938
ketika Shannon menemukan bahwa aljabar Boole dapat dipakai untuk
menganalisis rangkaian relai yang melaksanakan operasi pensakelaran (yang
sekarang kita kenal sebagai gerbang AND dan OR).
II.4.1 Gerbang AND
Gambar 2.3 memperlihatkan simbol, tabel kebenaran, dan
pernyataan Boole untuk gerbang AND yang merupakan salah satu dari
12
keluaran gerbang AND akan berlogika 0, kecuali jika kedua masukan
gerbang dengan dua masukan ini berada pada logika 1. Gerbang AND
berguna untuk menguji kebenaran bilangan biner 1, dan dalam rangkaian
dimana beberapa faktor kendali mengatur keluaran.
Gambar 2.3. Gerbang AND
Tabel 2.1. Tabel kebenaran gerbang AND
Masukan Keluaran
B A Q
0 0 0
0 1 0
1 0 0
1 1 1
II.4.2 Gerbang OR
Simbol, tabel kebenaran, dan pernyataan Boole untuk gerbang OR
diperlihatkan pada gambar 2.4. Jenis gerbang OR ini menghasilkan logika
1 dikeluaran jika salah satu atau kedua masukannya berada pada logika 1.
umtuk masukan-masukan yang semua ditetapkan pada 0 keluarannya juga
berada pada logika 0. sebuah gerbang OR akan dipakai jika terdapat
Gambar 2.4. Gerbang OR
Tabel 2.2. Tabel Kebenaran Gerbang OR
Masukan Keluaran
B A Q
0 0 0
0 1 1
1 0 1
1 1 1
II.4.3 Gerbang NOT
Gerbang NOT, inverter, atau rangkaian pembuat komplemen,
seperti pada gambar 2.5, hanya terdiri atas pembalik yang keluarannya
merupakan kebalikan dari logika masukan. Inverter dapat diperlukan
dalam suatu rangkaian jika gerbang sebelumnya meghasilkan keluaran
yang polaritasnya tidak sesuai.
14
Tabel 2.3. Tabel kebenaran gerbang NOT
A Q
0 1
1 0
II.4.4 Gerbang NAND
Gerbang NAND merupakan gerbang AND yang dihubungkan
dengan suatu pembalik, seperti pada gambar 2.6. Masukan A dan B
di-AND-kan untuk membentuk aljabar Boolean A · B kemudian, A · B
dibalik dengan gerbamg NOT. Pada sisi kanan dari pembalik ditambahkan
tanda strip diatas pada aljabar Boolean tersebut. Aljabar Boolean untuk
keseluruhan rangkaian tersebut adalah A•B = Y. Dalam hal ini
dikatakan, bahwa rangkaian tersebut merupakan suatu not-AND atau
rangkaian NAND.
Gambar 2.6. Gerbang NAND
Simbol NAND merupakan suatu simbol NAND dengan gelembung kecil
pada keluarannya. Gelembung tersebut disebut dengan suatu gelembung
Tabel kebenaran menggambarkan operasi yang tepat dari suatu
logika. Tabel kebenaran suatu gerbang NAND yang akan menghasilkan 0
(rendah) bila dibuka (bila semua masukan mendapat level logika 1) atau
secara lebih jelasnya keluaran khas dari gerbang NAND adalah rendah
apabila semua masukan tinggi. Tabel kebenaran gerbang NAND
ditunjukkan pada tabel 2.4.
Tabel 2.4. Tabel kebenaran gerbang AND dan gerbang NAND
Masukan Keluaran
B A AND NAND
0 0 0 1
0 1 0 1
1 0 0 1
1 1 1 0
Gerbang NAND banyak dipakai dalam logika positif, sebab secara
elektronik gerbang ini mudah dibuat. Sekarang ini, fungsi NAND telah
menjadi gerbang universal dalam rangkaian digital, dan penggunaannya
sangat luas dalam sistem digital.
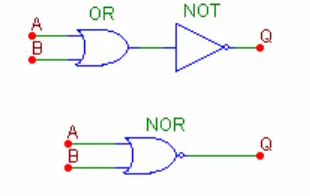
II.4.5 Gerbang NOR
Gerbang NOR merupakan gerbang OR yang dihubungkan dengan
suatu pembalik, seperti pada gambar 2.7. Masukan A dan B di-OR-kan
16
gerbang NOT. Pada sisi kanan dari pembalik ditambahkan tanda strip
diatas pada aljabar Boolean tersebut. Aljabar Boolean untuk keseluruhan
rangkaian tersebut adalah A+B dalam hal ini dikatakan, bahwa rangkaian
tersebut merupakan suatu not-OR atau rangkaian NOR.
Gambar 2.7. Gerbang NOR
Simbol NOR merupakan suatu simbol NOR dengan gelembung kecil pada
keluarannya. Gelembung tersebut disebut dengan suatu gelembung
pembalik (invert bubble).
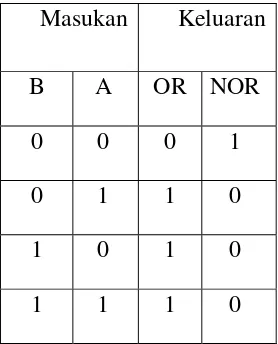
Tabel kebenaran menggambarkan operasi yang tepat dari suatu logika.
Tabel kebenaran suatu gerbang NOR yang akan menghasilkan 0 (rendah)
bila dibuka (bila semua masukan mendapat level logika 1) atau secara
lebih jelasnya keluaran khas dari gerbang NOR adalah rendah apabila
semua masukan tinggi. Tabel kebenaran gerbang NOR ditunjukkan pada
Tabel 2.5. Tabel kebenaran gerbang OR dan gerbang NOR
Masukan Keluaran
B A OR NOR
0 0 0 1
0 1 1 0
1 0 1 0
1 1 1 0
Gerbang NOR banyak dipakai dalam logika positif, sebab secara
elektronik gerbang ini mudah dibuat. Sekarang ini, fungsi NOR telah
menjadi gerbang universal dalam rangkaian digital, dan penggunaannya
sangat luas dalam sistem digital [4].
II. 5 Pembanding
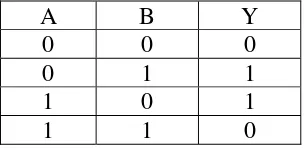
Gerbang XOR dua masukan mempunyai karakteristik bahwa jika kedua
masukan sama, maka keluarannya ”0” (logika rendah). Jika masukan berbeda,
maka keluarannya ”1” (logika tinggi). Gambar 2.8 adalah simbol logika standar
untuk gerbang XOR dua masukan.
18
Table 2.6. Tabel kebenaran XOR dua masukan
A B Y 0 0 0 0 1 1 1 0 1 1 1 0
Gerbang XOR merupakan gerbang gabungan antara gerbang NOT,
gerbang AND , dan gerbang OR. Gabungan ketiga gerbang tersebut membentuk
satu gerbang, yaitu gerbang XOR.
Pembanding atau komparator adalah rangkaian yang membandingkan
besaran masukan dengan suatu taraf referensi (atau dengan masukan lain) dan
menghasilkan suatu perubahan keadaan di keluaran bila salah satu masukan
melampaui yang lain. XOR merupakan pembanding yang paling sederhana.
Pada pembanding yang digunakan untuk membandingkan dua data yang
masing-masing terdiri dari 4 bit, dibutuhkan empat buah gerbang XOR. Untuk
mendapatkan hasil akhir perbandingan, empat buah gerbang XOR dihubungkan
pada sebuah gerbang AND seperti pada gambar 2.9. Bila keluaran dari ke empat
buah gerbang XOR bernilai 1 maka keluaran gerbang AND juga akan tinggi atau
bernilai 1.
Contoh IC yang dapat membandingkan hingga 4 bit adalah IC 74LS85
yang ditunjukkan pada Gambar 2.10 IC 74LS85 memiliki 2 kelompok masukan,
masing-masing kelompok terdiri dari 4 bit masukan. Pembanding yang besarnya 4
bit ini memberikan tiga keputusan (keluaran) terhadap dua kata 4 bit (masukan)
yang dibandingkan yaitu A<B, A>B atau A=B.
74LS85
10 12 13 15 9 11 14 1 2 3 4
7 6 5
A0 A1 A2 A3 B0 B1 B2 B3 A<Bi A=Bi A>Bi
A<Bo A=Bo A>Bo
Gambar 2.10 IC 74LS85
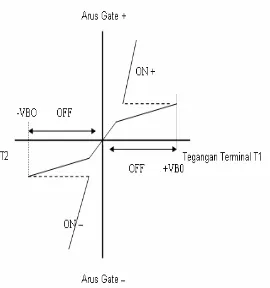
II.6 Triac
Triac atau AC switch, merupakan saklar arus bolak–balik bentuk trioda
(mempunyai 3 elektroda). Gambar 2.11 adalah bentuk fisik triac. Pada dasarnya
triac terdiri dari dua SCR (Silicon Controlled Rectifier) yang terpasang
paralel/berlawanan, dan dilengkapi dengan elektroda (pintu/gate).
20
Keunggulan triac adalah dapat digunakan untuk mengatur daya dalam
batas–batas lebih lebar, artinya dengan triac arus dapat mengalir ke arah bolak –
balik dan triac dipakai untuk pengaturan daya gelombang penuh. Triac
mempunyai tiga terminal; dua terminal utama yakni MT1 dan MT2 serta satu
gerbang G (gate). Terminal MT1 dan MT2 dirancang demikian sebab aliran arus
adalah dua arah.
Jika terminal MT1 dan MT2 diberi tegangan AC dan gate dalam kondisi
mengambang maka tidak ada arus yang dilewatkan oleh triac sampai pada
tegangan breakover triac tercapai. Pada kondisi ini triac OFF. Pada saat gate
diberi arus positif atau negatif maka tegangan breakover ini akan turun. Semakin
besar nilai arus yang masuk ke gate maka semakin rendah tegangan
breakover-nya. Pada kondisi ini triac menjadi ON selama tegangan pada MT1 dan MT2
diatas nol volt. Apabila tegangan pada MT1 dan MT2 sudah mencapai nol volt
maka kondisi kerja triac akan berubah dari ON ke OFF. Ketika triac sudah
menjadi OFF kembali, triac akan selamanya OFF sampai ada arus trigger ke gate
dan tegangan MT1 dan MT2 melebihi tegangan breakover-nya. Pada gambar 2.12
memperlihatkan daerah kerja triac[5].
II.7 Penggerak ( Driver ) Motor
Untuk mengendalikan motor AC menggunakan tegangan DC dapat
digunakan komponen elektronika dengan nama triac. Triac atau AC switch,
merupakan saklar arus bolak–balik bentuk trioda (mempunyai 3 elektroda). Pada
dasarnya triac terdiri dari dua SCR (Silicon Controlled Rectifier) yang terpasang
paralel, dan dilengkapi dengan elektroda (pintu/gate) [6].
II.8 Optoisolator
Optoisolator terdiri dari sebuah LED inframerah galium arsenida (GaAs),
sinarnya dapat mengaktifkan silicon bilateral switch yang fungsinya seperti
sebuah triac. Pada umumnya penggunaan optoisolator digunakan sebagai
penghubung antara rangkaian pengendali dengan triac untuk mengendalikan
beban dengan tegangan AC. Optoisolator ini tidak digunakan untuk
mengendalikan beban secara langsung tetapi digunakan sebagai komponen
pemicu saja [7].
Salah satu komponen yang masuk dalam jenis optoisolator adalah
MOC302X. MOC302X ini memiliki batas tegangan maksimal LED infamerah
(VF maks) sebesar 1,5 Volt dengan arus sebesar (IF) 10mA dan tegangan balik
maksimal (VR) 3Volt.
Pada saat MOC302X tidak aktif, komponen ini mampu menahan tegangan
sebesar 400 Volt. Pada saat aktif detector dapat melewatkan arus pada arah yang
berlawanan (ITM) sebesar 100 mA. Konfigurasi MOC302X dapat dilihat pada
22
Gambar 2.13.Konfigurasi dari MOC302X
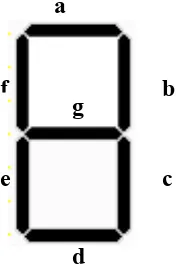
II.9 Peraga LED Tujuh Segmen
Peralatan keluaran yang sangat umum digunakan untuk menayangkan
bilangan desimal adalah peragaan tujuh segmen. Ketujuh segmen dari peraga
tersebut diberi label a sampai g pada gambar 2.14. Tayangan yang menyatakan
digit desimal 0 sampai 9 diperlihatkan pada gambar 2.15. Sebagai contoh, bila
segmen a, b, dan c menyala, maka desimal 7 ditampilkan. Bila semua segmen dari
a sampai g menyala, desimal 8 ditampilkan.
a
b
c g
e f
Gambar 2.15. Bentuk bilangan desimal tampilan tujuh segmen
Tabel 2.7. dibawah ini menunjukkan tabel segmen yang aktif untuk setiap angka desimal[8].
Tabel 2.7. Segmen yang aktif untuk setiap angka desimal. Desimal Segmen yang aktif
0 1 2 3 4 5 6 7 8 9
a, b, c, d, e, f b, c a, b, d, e, g a, b, c, d, g b, c, f, g a, c, d, f, g a, c, d, e, f, g
a, b, c a, b, c,d, e, f, g
a, b, c, d, f, g
II.10 Penggerak/Pengkode BCD-ke-Tujuh Segmen
Diagram blok suatu sistem digital yang menggunakan pengkode pada
gambar 2.16. Pengkode dalam sistem ini harus menerjemahkan masukan desimal
dari papan tombol(keyboard) ke suatu kode BCD 8421 seperti pada gambar 2.17.
Bila masukan desimal 9 pada pengkode diaktifkan, maka rangkaian logika di
dalam unit tersebut mengeluarkan angka BCD 0101 seperti diperlihatkan [9].
Pengkodean
Unit Proses
dan Memori
Dekode Tombol
Masukan
1 2 3
24
Gambar 2.17. Masukan desimal dari papan tombol(keyboard) ke suatu kode BCD 8421.
II.11 Buffer Tegangan
Buffer tegangan berfungsi untuk menjaga tegangan output agar tidak
terbebani oleh beban rangkaian sebelumnya atau dapat dikatakan bahwa buffer
digunakan untuk menghubungkan rangkaian yang memiliki impedansi keluaran
yang tinggi, dengan rangkaian yang memilki impedansi rendah. Konfigurasi
buffer tegangan seperti pada gambar 2.18.
Gambar 2.18. Konfigurasi buffer tegangan
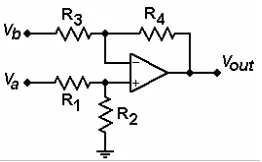
II.12 Differential Amplifier (Penguat Selisih)
Gambar 2.19. merupakan gambar rangkaian differential amplifier atau
penguat selisih. Rangkaian ini digunakan untuk mengurangkan dua buah tegangan
yang sebelumnya dapat dikuatkan terlebih dahulu. Besar penguatan untuk kedua
tegangan masukan tersebut dapat diatur, yakni dengan menentukan nilai-nilai
resistansi yang akan digunakan. Tegangan keluaran (Vout) dari rangkaian
differential amplifier ini dapat diperoleh dengan menggunakan persamaan berikut:
b a
out V
R R V R R
R R
R
V (1 )( ) ( )
3 4
2 1
2
3
4 −
+ +
= ………(2.3)
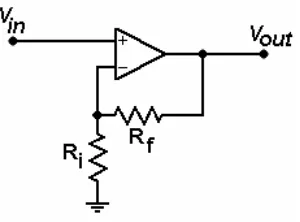
II.13 Non inverting Ampilfier
Gambar 2.20. Rangkaian Non Inverting Amplifier
Gambar 2.20. merupakan gambar rangkaian non inverting amplifier.
Rangkaian ini digunakan untuk menguatkan suatu nilai tegangan dengan tegangan
keluaran yang bersifat positif. Persamaan untuk mencari tegangan keluaran
adalah sebagai berikut:
in i f
out V
R R
V =(1+ ) ………..……(2.4)
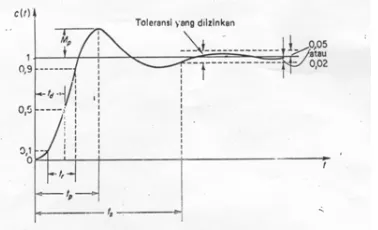
II. 14 Tanggapan Sistem
Sebagian besar sistem kontrol adalah sistem kawasan waktu; yang berarti,
26
kontrol sering menunjukkan osilasi teredam sebelum mencapai keadaan tunak.
Dalam menentukan karakteristik tanggapan system control terhadap masukan
tangga satuan, biasanya dicari parameter-parameter berikut:
1. Waktu Tunda ( Delay Time ), td
Yaitu waktu yang diperlukan tanggapan mencapai setengah harga akhir yang
pertama kali.
2. Waktu Naik ( Rise Time ), tr
Yaitu waktu yang diperlukan tanggapan untuk naik dari 10% hingga 90% dari
harga akhirnya.
3. Waktu Penetapan ( Settling Time ), ts
Yaitu waktu yang diperlukan kurva tanggapan dan menetap dalam daerah
disekitar harga akhir yang ukurannya ditentukan dengan persentase mutlak
dari harga akhir (biasanya 5% atau 2%).
4. Waktu Puncak (peak time), tp
Yaitu waktu yang diperlukan respon untuk mencapai puncak lewatan
pertamakali.
5. Lewatan maksimum (maximum overshoot), Mp
Yaitu harga puncak maksimum dari kurva respon yang diukur dari satu. Jika
harga keadaan tunak respon tidak sama dengan satu, maka biasa digunakan
persen lewatan maksimum.
Parameter ini didefinisikan sebagai
Persen lewatan maksimum = 100%
) (
) ( ) (
× ∞
∞ −
c c t c p
Besarnya (persen) lewatan maksimum secara langsung menunjukkan
kestabilan relatif sistem.
Untuk mengetahui karakteristik tanggapan system control terhadap
masukan tangga satuan dapat ditunjukkan contoh pada gambar 2.21.
Gambar 2.21 Kurva respon tangga satuan yang menunjukkan td, tr, tp,Mp, dan ts
Spesifikasi di atas ditunjukkan secara grafis pada gambar 2.21. Untuk
memperoleh nilai-nilai tersebut digunakan rumus:
Delay Time ( td ) = t50 % - t0 (2.6)
Rise Time ( tr ) = t90 % - t10 % (2.7)
Settling Time ( ts ) = t98 % - t0 (2.8)
Pada suatu sistem kontrol otomatik sering terjadi error, dan yang biasa
terjadi adalah steady-state error. Steady-state error (ess) sendiri adalah perbedaan
antara keluaran sistem (hasil akhir) dan set point saat keadaan sistem stabil atau
tetap. Steady-state error (ess) dapat dilihat pada gambar 2.22 di bawah.
BAB III
PERANCANGAN
III.1 Diagram Blok
Gambar 3.1 menunjukkan gambar diagram blok perancangan pengendali ketinggian air berbasis rangkaian digital.
Gambar 3.1. Diagram blok perancangan pengendali ketinggian air.
III.2 Plant pengendali ketinggian air.
Plant ketinggian air pada perancangan ditunjukkan pada gambar 3.2. Bagian-bagian dari plant ketinggian air terdiri dari:
1. Potensiometer. 2. Tangki 1. 3. Tangki 2. 4. Pompa air. 5. Kran air. 6. Catu daya.
7. Kontroler, driver, dan display. 8. Rangka.
Gambar 3.2. Plant ketinggian air
Tangki 1 dan 2 pada plant memiliki ukuran yang sama yaitu: panjang 30 cm, lebar 15 cm, dan tinggi 15 cm. Ketinggian maksimal tangki air adalah 15 cm maka batas ketinggian air maksimal yang dikendalikan adalah 12 cm.
III.3 Sensor ketinggian air
30
VCC
10k
1
3
2
output sensor
Gambar 3.3. Rangkaian sensor.
Potensiometer yang digunakan sebagai sensor sebesar 10 KΩ dengan menggunakan catu daya sebesar 5 Volt data keluaran tegangan seperti pada tabel 3.1.
Tabel 3.1 Data Pengukuran awal
Ketinggian air (cm) Tegangan Keluaran Sensor (V)
0 1,59 1 1,69 2 1,77 3 1,85 4 1,92 5 2 6 2,08 7 2,16 8 2,24 9 2,32
0 0.5 1 1.5 2 2.5
0 2 4 6 8
ketinggian air (cm)
T
e
ga
nga
n K
e
lu
a
ra
n
S
e
n
s
or
(
V
)
10
Gambar 3.4 Grafik tegangan keluaran terhadap ketinggian air
III.4 Rangkaian pengkondisi sinyal
Tabel 3.2. Tegangan keluaran rangkaian pengkondisi sinyal. Ketinggian air
(cm)
Tegangan keluaran sensor (V)
Tegangan keluaran rangkaian pengkondisi sinyal
(mV)
0 1,59 0 1 1,69 19,6 2 1,77 39,2 3 1,85 58,8 4 1,92 78,4 5 2 98
6 2,08 117,6
7 2,16 137,2
8 2,24 156,8
9 2,32 176,4
32
oleh ADC 0804 maka digunakan rangkaian pengondisi sinyal dengan persamaan sebagai berikut:
sensor ADC
Resolusi Resolusi ).
( sensor X
ADC V V
V = −
Keterangan :
VADC = tegangan yang digunakan sebagai masukan analog dari ADC
(Volt)
Vsensor = tegangan keluaran dari sensor (Volt)
VX = tegangan referensi, merupakan tegangan keluaran terkecil sensor
, yakni 1,59 V
Resolusi ADC = kenaikan setiap bit, yakni 19,6 mV
Resolusi sensor = kenaikan setiap 1 cm, yakni 0,08 V
Berdasarkan keterangan tersebut maka persamaan dari rangkaian pengondisi sinyal dapat diperoleh seperti di bawah ini :
0,08 0,0196 ).
59 , 1
( −
= sensor
ADC V
V
245 , 0 ). 59 , 1
( −
= sensor
ADC V
V
Persamaan di atas dapat diterapkan dalam suatu rangkaian yang dapat diperoleh dengan menghubungkan rangkaian pengurang dan rangkaian penguat.
Dalam rangkaian pengurang, tegangan keluaran sensor akan dikurangi dengan tegangan 1,59 Volt. Dalam hal ini agar dapat menghasilkan persamaan tersebut maka resistansi yang digunakan dalam rangkaian pengurang ini memiliki besar yang sama yakni R3 = R4 = R5 = R6 = 10 KΩ. Tegangan referensi sebesar
dalam hal ini digunakan VCC = 5 Volt dan R2 sebesar 10 KΩ sehingga R1 dapat
diperoleh dengan perhitungan sebagai berikut :
CC 2 1 2 X V R R V R + = CC X 2 1 2 V V R R = +R 318 , 0 5 1,59 10 R 10 1 = = Ω + Ω K K
(R1+10 KΩ). 0,318 = 10 KΩ
0,318 R1 = 10 KΩ- 3,18 KΩ
= 6,82 KΩ
R1 =6,82 KΩ / 0,318
= 21,446 KΩ
Karena resistor dengan nilai 21,446 KΩ tidak dapat dijumpai di pasaran maka dalam perancangan ini digunakan resistor variabel ( potensiometer).
Rangkaian penguat inverting mempunyai keluaran nilai negatif. Sehingga diperlukan rangkaian pembalik dengan penguatan sebesar satu kali dengan nilai R7 dan R8 sebesar 10 KΩ. Dengan menggunakan rangkaian penguat inverting
maka pelemahan sebesar 0,245 dapat diperoleh dengan perhitungan sebagai berikut : I F R R − =
A ; A = pelemahan (sebesar 0,245), dipilih RI sebesar 10 KΩ
RF = -(A).RI
34
RF = 2,45 KΩ
Dalam perancangan ini digunakan resistor variabel (potentiometer) untuk mendapatkan resistansi dengan nilai 2,45 KΩ.
Rangkaian pengondisi sinyal seperti terlihat pada gambar 3.5. Sedangkan rangkaian untuk ADC0804 dapat terlihat pada gambar 3.6.
5 V R5= 10K 5 V 5 V R7= 10K + -U6 LM741 3 2 6 7 1 4 5 -5V R2= 10K 5 V + -U4 LM741 3 2 6 7 1 4 5 -5 V R3= 10K R8= 10K R1= POT 10K
1
3
2
RF= POT 10K
1 3 2 -5 V + -LM741 3 2 6 7 1 4 5 + -LM741 3 2 6 7 1 4 5
INPUT ADC 0804 5 V
R4= 10K
5 V
R6= 10K
-5 V
TEGANGAN KELUARAN SENSOR
RI= 10K -5 V 5 V U2A LM358 3 2 8 4 1 + -V+ V -OUT + -U3 LM741 3 2 6 7 1 4 5
Gambar 3.5. Rangkaian Pengondisi Sinyal
input IC pembanding
R12= 10K
input BCD to 7's
R10= 10K
input IC pembanding
R11= 10K
input IC pembanding 5 V
OUTPUT PENGKONDISI SINY AL
input BCD to 7's
input BCD to 7's
5 V
C1= 150pF
input IC pembanding
ADC0804 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 4 5 1 2 3 +IN -IN GN D VREF/2 GN D DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
CLKR VC
C /VR EF CLKIN INTR CS RD WR
input BCD to 7's
III.5 Set point
Set point yang digunakan adalah saklar. Dalam rancangan saklar yang digunakan sebanyak 4 buah, karena terdapat 4 set point untuk mengatur ketinggian air yang diinginkan.
Ada 4 set point yang ditentukan yaitu: 1. Ketinggian air 3 cm
2. Ketinggian air 5 cm 3. Ketinggian air 7 cm 4. Ketinggian air 9 cm
Ketinggian air yang digunakan sebagai set point dan keluaran digital dapat dilihat pada tabel 3.3 di bawah.
Tabel 3.3 Tabel ketinggian air dan keluaran digital
Set point
(cm)
Keluaran Digital
3 0010 5 0101 7 0111 9 1001
36 U2B 7404 3 4 S4 SWITCH 1X2 S3 SWITCH 1X2 5 V U1 74147 7 9 6 14 11 12 13 1 2 3 4 5 10 16 8 B A C D IN1 IN2 IN3 IN4 IN5 IN6 IN7 IN8 IN9 VC C GN D U2A 7404 1 2 S2 SWITCH 1X2
5 V INPUT BCD TO 7'S
5 V
INPUT IC PEMBANDING 5 V
S1
SWITCH 1X2
INPUT BCD TO 7'S R1 1K R2 1K R3 1K R4 1K
INPUT IC PEMBANDING
U2D
7404
9 8
INPUT BCD TO 7'S
INPUT IC PEMBANDING
5 V
INPUT BCD TO 7'S
U2C
7404
5 6
INPUT IC PEMBANDING
Gambar 3.7. Rangkaian set point.
Untuk memilih tegangan keluaran set point yang diinginkan digunakan saklar 1, saklar 2, saklar 3 dan saklar 4. Jika diinginkan keluaran set point 1 maka saklar 1 harus ditekan, begitu pula jika diinginkan keluaran untuk set point 2, 3, dan 4 maka saklar 2, 3, atau 4 yang harus ditekan secara bergantian. Pada rangkaian saklar digunakan resistor sebesar 1 KΩ.
III.6 ADC 0804
Gambar 3.8. Kaki-kaki IC ADC 0804
ADC 0804 digunakan sebagai pengubah masukan analog menjadi keluaran digital. ADC ini hanya membutuhkan dua komponen luar sebagai pembangkit frekuensi (Clk R dan Clk In) yaitu sebuah hambatan dan sebuah kapasitor. Bila menggunakan R5 =10 KΩ dan C1 = 150 pF seperti yang
digunakan dalam data sheet, maka fclock dapat dihitung besarnya :
1
1 C
R 1,1
1
× × =
clock
f
fclock =
pF 150 K
10 1 , 1
1 × Ω
×
fclock = 606 KHz
III.7 Rangkaian Kontroler
38
dengan keluaran dari sensor. Pembanding (comparator) yang digunakan dalam rancangan ini adalah IC 74LS85. IC tersebut merupakan IC pembanding 4 bit. Gambar dari IC 74LS85 ini adalah tampak pada Gambar 3.9. Keluaran dari pembanding akan dihubungkan dengan driver, yang kemudian mengendalikan pompa air untuk mengisi tangki 2.
Gambar 3.9. IC 74LS85 sebagai kontroler.
III.8 BCD to 7 segment
Untuk melihat data ketinggian air dan set point yang diinginkan secara langsung digunakan suatu pengurai sandi yaitu BCD (Binary Coded Decimal) dan perangkat peraga 7 segmen yang terdiri dari 7 LED dengan format dasar angka 8. Dalam perancangan ini BCD yang digunakan adalah IC TTL 7447. Rangkaian IC TTL 7447 dengan 7 segmen seperti pada gambar 3.10.
IC TTL 7447 adalah dekoder BCD common anode, artinya bahwa keluaran dari IC ini yaitu A, B, C, D, E, F, G bekerja pada arus rendah. Karena dekoder ini bekerja dengan aktif rendah maka jenis 7 segmen yang digunakan harus 7 segmen jenis common anode.
D5 LED e 330 7447A 7 1 2 6 5 3 13 12 11 10 9 15 14 8 4 16 INA INB INC IND RBI LT OUTA OUTB OUTC OUTD OUTE OUTF OUTG GN D BI/RBO VC C d 330 g a 5 V D2 LED D6 LED c 330 D4 LED b INPUT D7 LED 330 330 INPUT 330 f INPUT 330 D1 LED INPUT D3 LED Gambar 3.10. BCD to 7 segment dan 7 segmen
BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bagian ini akan dibahas data hasil pengamatan pada alat, yaitu pengamatan terhadap cara kerja alat dan data untuk tegangan, waktu, dan level air pada pengendali ketinggian air berbasis rangkaian digital. Adapun bentuk dari hasil akhir alat pengendali ketinggian air berbasis rangkaian digital dapat dilihat pada gambar 4.1 dibawah ini.
Gambar 4.1.Perangkat Keras Pengendali Ketinggian Air Berbasis Rangkaian Digital
4.1 Cara Kerja dan Cara Pengoperasian Alat
Pengendali ketinggian air berbasis rangkaian digital ini berfungsi untuk mengatur level (ketinggian) air pada dua buah tangki penampungan air, yaitu
tangki 1 dan tangki 2. Tangki 1 berfungsi sebagai sumber, dan tangki 2 sebagai tangki objek yang akan diukur ketinggian airnya. Air dari tangki sumber dipompa oleh sebuah pompa air menuju ke tangki atas. Pada tangki 2 dipasang sensor yang berfungsi untuk menentukan batas-batas ketinggian air di mana pompa aktif maupun tidak aktif. Potensiometer digunakan sebagai sensor ketinggian air. Perubahan resistansi pada potensiometer karena perubahan ketinggian air akan menyebabkan perubahan tegangan pada rangkaian pengendali. Perubahan tegangan inilah yang nantinya berfungsi untuk mengaktifkan ataupun mematikan pompa. Perubahan tegangan pada plant ini akan diubah menjadi perubahan bilangan biner oleh ADC 0804. Perubahan biner ini yang nantinya akan diolah oleh rangkaian kontroler digital sehingga dapat menghidupkan dan mematikan pompa pada posisi ketinggian air yang diinginkan dengan set point 3 cm, 5 cm, 7 cm, dan 9 cm.
Untuk memilih ketinggian (level) air yang diinginkan digunakan saklar-saklar seperti yang ditunjukkan seperti gambar 4.1 di atas. Tampilan berupa dua tujuh segmen digunakan untuk menunjukkan level air. Tujuh segmen yang pertama digunakan untuk menunjukkan set point yang diinginkan, sedangkan untuk tujuh segmen yang kedua digunakan untuk menunjukkan ketinggian air pada tangki 1 sebagai objek yang akan diamati.
4.2 Data Pengamatan
42
besar resolusi atau kenaikan air setiap cm pada plant pengendali ketinggian air berbasis rangkaian digital. Keluaran dari sensor berupa tegangan, kenaikan tegangan sensor tersebut merepresentasikan kenaikan ketinggian air yang terlihat pada plant. Pengamatan dilakukan pada tegangan keluaran sensor dengan kenaikan air pada plant setiap 1 cm. Berikut disajikan tabel 4.1, tabel perbandingan keluaran sensor pada saat perancangan dan keluaran sensor pada perangkat keras.
Tabel 4.1. Perbandingan keluaran sensor pada saat perancangan dan keluaran sensor pada perangkat keras
Data Tegangan Keluaran Sensor (Volt)
Ketinggian air (cm)
Perancangan Pengamatan
0 1,59 1,59
1 1,69 1,69
2 1,77 1,77
3 1,85 1,85
4 1,92 1,92
5 2 2
6 2,08 2,08
7 2,16 2,16
8 2,24 2,24
9 2,32 2,32
Berdasarkan tabel 4.1 pengamatan tegangan keluaran sensor secara keseluruhan, dapat dikatakan bahwa sistem sudah dapat bekerja dengan baik. Ini dapat dibuktikan dari hasil pengamatan nilai tegangan sensor ketinggian air yang ditunjukkan oleh perangkat keras sesuai dengan perancangan.
dibuka dapat diketahui cepat atau lambat tanggapan perangkat keras ketika ketinggian air berubah.
4.2.1 Data Pengamatan untuk Set Point 1 ( ketinggian air 3 cm)
Pada saat saklar 1 diaktifkan maka pada tujuh segmen yang pertama akan ditampilkan angka 3 yang menunjukkan ketinggian air yang diinginkan. Tujuh segmen yang kedua akan berubah dari 0 sampai dengan 3 (ketinggian air yang diinginkan), seperti pada gambar 4.2. Data pengamatan diambil dengan keadaan kran ditutup agar dapat diketahui apakah pengendali bisa mencapai titik stabil. Berikut data hasil pengamatan set point 3 cm ditunjukkan pada tabel 4.2.
Gambar 4.2. Tampilan set point 1 saat saklar 1 diaktifkan.
Tabel 4.2 Pengamatan untuk set point 3 cm Waktu (detik) Ketinggian air (cm)
44
Berdasarkan data tabel 4.2 dapat diperoleh gambar 4.3 yang menunjukkan grafik hubungan antara ketinggian air dengan waktu pada saat air berada di keadaan awal yaitu 0 cm dengan kenaikan setiap 0,5 cm sampai dengan nilai set point yang diinginkan.
0 0.5 1 1.5 2 2.5 3 3.5
0 5 10 15 20 25 30 35 40 45 50 55
waktu (detik)
k
e
ti
n
g
g
ia
n
a
ir
(c
m
)
Gambar 4.3 Grafik ketinggian air terhadap waktu untuk set point 3 cm Dari grafik di atas dapat diketahui bahwa keluaran (output sistem) mencapai kondisi akhir yang sama dengan set point. Untuk mencari karakteristik sistem yaitu delay time(td), rise time(tr) dan settling time(ts) pada set point 3 cm,
berikut ditunjukkkan dalam gambar 4.6.
Berdasarkan grafik tanggapan sistem di atas dan pendekatan dari tabel data 4.2, maka nilai delay time(td), rise time(tr) dan settling time(ts) dapat diperoleh dari
persamaan (2.6), (2.7), dan (2.8) yakni: a. td = t50% - t0%
=t{ 0 cm+ 50%(3 cm -0 cm)}- t{0} = t 1,5 cm
td≅11,32 detik
b. tr = t90% - t10%
- t90% = t{ 0 cm+ 90%(3 cm – 0 cm)}
= t 2,7 cm tr ≅17,34 detik
- t10% = t{0 cm + 10%( 3 cm- 0 cm)}
= t 0,3 cm ≅1,56 detik
maka nilai tr = 17,34 detik detik - 1,56 detik
≅15,78 detik c. ts = 0 cm+ 98%( 3 cm – 0cm)}
= t 2,94 cm ≅20,33 detik
4.2.2 Data Pengamatan untuk Set Point 2 ( ketinggian air 5 cm)
46
segmen yang kedua akan berubah dari 0 sampai dengan 5 (ketinggian air yang diinginkan), seperti pada gambar 4.5. Data pengamatan diambil dengan keadaan kran ditutup agar dapat diketahui apakah pengendali bisa mencapai titik stabil. Berikut data hasil pengamatan set point 5 cm ditunjukkan pada tabel 4.3.
Gambar 4.5. Tampilan set point 2 saat saklar 2 diaktifkan
Tabel 4.3 Pengamatan untuk set point 5 cm Waktu (detik) Ketinggian air (cm)
0 0 5,04 0,5 7,84 1 10,76 1,5 13,66 2 16,55 2,5 19,54 3 22,42 3,5 25,21 4 28,01 4,5 31,26 5 50,98 5
0 1 2 3 4 5 6
0 5 10 15 20 25 30 35 40 45 50
waktu (detik)
ket
in
g
g
ian
ai
r (
cm
)
Gambar 4.6 Grafik ketinggian air terhadap waktu untuk set point 5 cm Dari grafik dan data di atas dapat diketahui bahwa keluaran sistem dapat mencapai kondisi akhir yang sama dengan set point dengan steady-state error =0. Untuk mencari karakteristik sistem yaitu delay time(td), rise time(tr) dan settling
time(ts) pada set point 5 cm, berikut ditunjukkkan dalam gambar 4.7.
Gambar 4.7. Tanggapan sistem untuk set point 2 (5 cm)
Berdasarkan grafik tanggapan sistem di atas dan pendekatan dari tabel data 4.3, maka nilai delay time(td), rise time(tr) dan settling time(ts) dapat diperoleh dari
48
=t{ 0 cm+ 50%(5 cm -0 cm)}- t{0} = t 2,5 cm
≅16,55 detik b. tr = t90% - t10%
- t90% = t{ 0 cm+ 90%(5 cm – 0 cm)}
= t 4,5 cm ≅28,01 detik
- t10% = t{0 cm + 10%( 5cm- 0 cm)}
= t 0,5 cm ≅5,04 detik
maka nilai tr = 28,01 detik - 5,04 detik
≅22,97 detik c. ts = 0 cm+ 98%( 5 cm – 0cm)}
= t 4,9 cm ≅31,19 detik
4.2.3 Data Pengamatan untuk Set Point 3 ( ketinggian air 7 cm).
Gambar 4.8. Tampilan set point 3 saat saklar 3 diaktifkan
Tabel 4.4. Pengamatan untuk set point 7 cm Waktu (detik) Ketinggian air (cm)
0 0 5,46 0,5 9,02 1 12,58 1,5
15,7 2 19,15 2,5
22,4 3 26,04 3,5 29,59 4 33,03 4,5 36,82 5 39,83 5,5 43,32 6 46,83 6,5 50,12 7 60,46 7
50
0 1 2 3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55 60
waktu (detik)
ke
ti
n
g
g
ian
ai
r (
c
m
)
Gambar 4.9 Grafik ketinggian air terhadap waktu untuk set point 7 cm. Dari grafik dan data di atas dapat diketahui bahwa keluaran sistem dapat mencapai kondisi akhir yang sama dengan set point dengan steady-state error =0. Untuk mencari karakteristik sistem yaitu delay time(td), rise time(tr) dan settling
time(ts) pada set point 7 cm, berikut ditunjukkkan dalam gambar 4.10.
Gambar 4.10. Tanggapan sistem untuk set point 3 (7 cm)
Berdasarkan grafik tanggapan sistem di atas dan pendekatan dari tabel data 4.4, maka nilai delay time(td), rise time(tr) dan settling time(ts) dapat diperoleh dari
persamaan (2.6), (2.7), dan (2.8) yakni: a. td = t50% - t0%
= t 3,5 cm ≅26,04 detik b. tr = t90% - t10%
- t90% = t{ 0 cm+ 90%(7cm – 0 cm)}
= t 6,3 cm ≅45,43 detik
- t10% = t{0 cm + 10%( 7cm- 0 cm)}
= t 0,7 cm ≅6,88 detik
maka nilai tr = 45,43 detik - 6,88 detik
≅38,55 detik c. ts = 0 cm+ 98%( 7cm – 0cm)}
= t 6,86 cm ≅49,33 detik
4.2.4 Data Pengamatan untuk Set Point 4 ( ketinggian air 9 cm).
52
Gambar 4.11. Tampilan set point 4 saat saklar 4 diaktifkan Tabel 4.5. Pengamatan untuk set point 9 cm
Waktu (detik) Ketinggian air (cm)
0 0 4,83 0,5 8,27 1 12,06 1,5 15,18 2 18,19 2,5 22,07 3 25,59 3,5 29,23 4 32,34 4,5 35,87 5 39,28 5,5 42,33 6 46,01 6,5 49,97 7 53,58 7,5 57,55 8 61,05 8,5 67,71 9,4 80,12 9,4
0
0.51
1.52
2.53
3.54
4.55
5.56
6.57
7.58
8.59
9.510
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
waktu (detik)
ket
in
g
g
ian
ai
r (
c
m
)
Gambar 4.12. Grafik ketinggian air terhadap waktu untuk set point 9 cm. Dari grafik dan data di atas dapat diketahui bahwa keluaran sistem dapat mencapai kondisi akhir yang sama dengan set point. Untuk mencari karakteristik sistem yaitu delay time(td), rise time(tr) dan settling time(ts) pada set point 9 cm,
berikut ditunjukkkan dalam gambar 4.13.
Gambar 4.13. Tanggapan sistem untuk set point 4 (9cm)
Berdasarkan grafik tanggapan sistem di atas dan pendekatan dari tabel data 4.5, maka nilai delay time(td), rise time(tr) dan settling time(ts) dapat diperoleh dari
persamaan (2.6), (2.7), dan (2.8) yakni: a. td = t50% - t0%
54
= t 4,7 cm ≅33,75 detik b. tr = t90% - t10%
- t90% = t{ 0 cm+ 90%(9,4cm – 0 cm)}
= t 8,46 cm ≅60,77detik
- t10% = t{0 cm + 10%( 9,4cm- 0 cm)}
= t 0,94 cm ≅ 8,20 detik
maka nilai tr = 60,77 detik - 8,20 detik
≅52,57 detik c. ts = 0 cm+ 98%( 9,4cm – 0cm)}
= t 9,212 cm ≅66,378 detik
d. Error steady state = 100 9
9 4 ,
9 − ×
%
= 4,4444 %
Hasil perhitungan respon transien dari keempat hasil pengujian di atas dapat dilihat pada tabel 4.6. Tabel tersebut menunjukkan perbedaan hasil pengujian tiap set point.
Tabel 4.6 Data Delay Time, Rise Time, Settling Time dan Steady-state Error
Set point td
(detik)
tr (detik)
ts
(detik) ess
3 cm ≅11,32 ≅17,34 ≅20,33 -
5cm ≅16,55 ≅22,97 ≅31,19 -
7 cm ≅26,04 ≅38,55 ≅49,33 -
Dari data tabel 4.6 di atas sistem dapat dikatakan stabil, yang merupakan syarat utama dari sistem kontrol. Sistem bekerja dengan baik karena pada setiap
set point terdapat setling time (ts), rise time (tr) dan delay time (td) yang
menujukkan respon transien sistem yang sesuai dengan kurva respon tangga satuan yang ditunjukkan pada gambar 2.21. Pada tabel 4.6 dapat dilihat bahwa sistem memiliki error steady-state, yaitu perbedaan antara hasil akhir sistem dan nilai