BAB II
LANDASAN TEORI
Pada bab ini akan dibahas mengenai teori-teori dasar yang digunakan untuk menunjang perancangan dan pembuatan alat.
2.1 PENGERTIAN PROSES PRODUKSI PADA INDUSTRI
Pada umumnya proses produksi merupakan kegiatan utama yang dilakukan dalam dunia industri. Proses produksi tidak terlepas dari pengendalian kualitas produk yaitu pada benda dengan kategori lolos uji (Non-Reject)dan tidak lolos uji (Reject). Sebagaimana proses dapat diartikan
sebagai suatu cara, metode dan teknik bagaimana sesungguhnya sumber-sumber (tenaga kerja, mesin, bahan dan dana) yang ada diubah untuk memperoleh suatu hasil. Produksi adalah kegiatan untuk menciptakan atau menambah kegunaan barang atau jasa (Assauri, 1995).
Menurut Vincent Gasperz (1998) Pengendalian kualitas ialah aktifitas teknik dan manajemen dalam mengukur karakteristik kualitas barang atau jasa yang dihasilkan, kemudian membandingkan hasil pengukuran tersebut dengan spesifikasi output yang diinginkan pelanggan serta mengambil
tindakan perbaikan yang tepat apabila ditemukan perbedaan antara performansi aktual dan standar.
Kesesuaian spesifikasi produk dapat diketahui dengan melakukan pengukuran terhadap produk atau benda dengan kategori lolos uji ( Non-Reject) dan tidak lolos uji (Reject). Kadang kala pengukuran tidak dapat
dilakukan tepat saat proses berlangsung. Hal tersebut dikarenakan beberapa kendala yaitu pengukuran harus dilakukan secara manual dengan menggunakan alat manual, membutuhkan tenaga tambahan, dan biaya tambahan untuk melakukan pengukuran serta alasan teknis lainnya.
Kesalahan spesifikasi produk membuat produk atau benda kurang berfungsi atau tidak berfungsi sama sekali terhadap kondisi yang diharapkan. Misalnya pada proses perakitan, jika komponen utama dan komponen pelengkap tidak sesuai dengan spesifikasi, maka kedua komponen tidak dapat dirakit. Hal ini bisa diakibatkan antara lain oleh kesalahan pada dimensi produk atau benda yang tidak sesuai, pemesinan yang tidak sesuai, atau material yang tidak memenuhi persyaratan. Kesalahan dimensi bisa disebabkan oleh kesalahan operator pada bagian QC (Quality Control) itu
sendiri dalam mengukur dan melakukan proses pemesinan. Kesalahan ini dapat disebabkan oleh kelalaian operator ataupun oleh alat yang digunakan. Kesalahan material bisa saja diakibatkan oleh material yang tidak memenuhi standar dimensi yang seharusnya, sehingga setelah dilakukan proses pemesinan dimensi dapat berlebih ataupun kurang dari yang seharusnya.
2.2 ARDUINO MEGA 2560
Arduino adalah papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Mikrokontroler itu sendiri adalah chip atau IC (Integrated Circuit) yang bisa diprogram menggunakan komputer.
Arduino Mega 2560 merupakan sebuah papan mikrokontroler berbasiskan Atmega 2560. Arduino Mega 2560 memiliki 54 pin digital input/output, dimana 15 pin dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (Port Serial Hardware), 16 MHz kristal osilator, koneksi USB, jack power, header ICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung mikrokontroler. Cukup dengan menghubungkannya ke komputer melalui kabel USB atau power dihubungkan dengan adaptor AC-DC atau baterai untuk mulai mengaktifkannya. Arduino Mega 2560 kompatibel dengan sebagian besar shield yang dirancang untuk Arduino Duemilanove atau Arduino Diecimila. Arduino Mega2560 adalah versi terbaru yang menggantikan versi Arduino Mega.
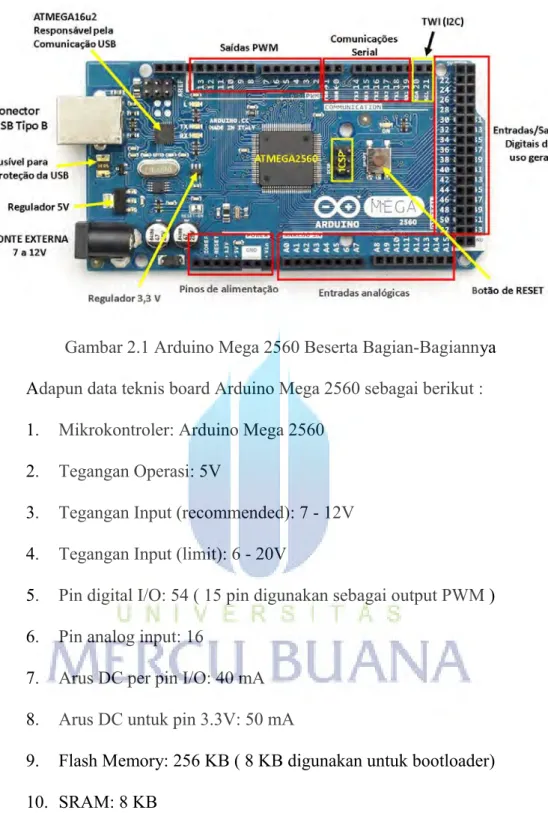
Tujuan menanamkan program pada mikrokontroler adalah agar rangkaian elektronik dapat membaca input, memproses input tersebut dan kemudian menghasilkan output sesuai yang diinginkan. Jadi mikrokontroler bertugas sebagai otak yang mengendalikan proses input, dan output sebuah rangkaian elektronik. Bagian-bagian pada Arduino dapat dilihat pada gambar 2.1.
Gambar 2.1 Arduino Mega 2560 Beserta Bagian-Bagiannya Adapun data teknis board Arduino Mega 2560 sebagai berikut :
1. Mikrokontroler: Arduino Mega 2560
2. Tegangan Operasi: 5V
3. Tegangan Input (recommended): 7 - 12V
4. Tegangan Input (limit): 6 - 20V
5. Pin digital I/O: 54 ( 15 pin digunakan sebagai output PWM ) 6. Pin analog input: 16
7. Arus DC per pin I/O: 40 mA
8. Arus DC untuk pin 3.3V: 50 mA
9. Flash Memory: 256 KB ( 8 KB digunakan untuk bootloader)
10. SRAM: 8 KB
11. EEPROM: 4 KB
2.2.1 Pin – pin mikrokontroler Atmega 2560
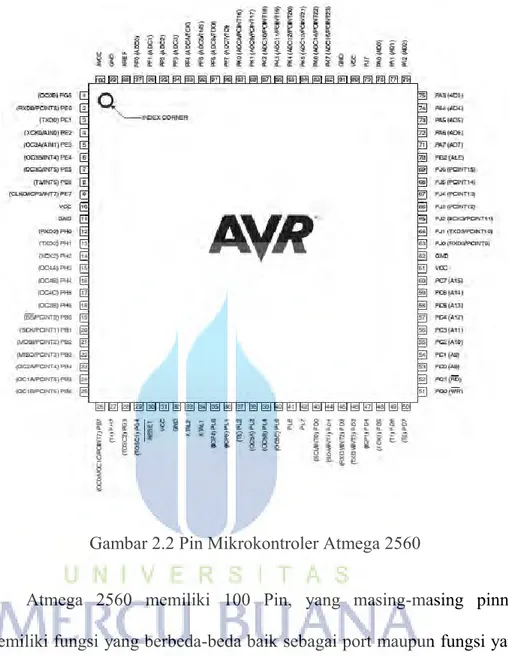
Gambar 2.2 Pin Mikrokontroler Atmega 2560
Atmega 2560 memiliki 100 Pin, yang masing-masing pinnya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya.
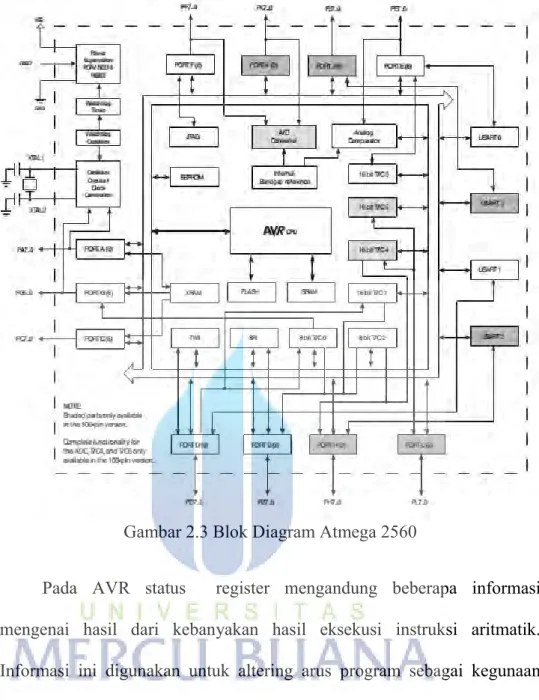
Gambar 2.3 Blok Diagram Atmega 2560
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic LogicUnit) hal tersebut seperti yang tertulis dalam data sheet khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instrukasi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dansingkat. Register ini tidak secara otomatis tersimpan
ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software.
2.3 ETHERNET SHIELD
Ethernet Shield menambah kemampuan arduino board agar terhubung ke jaringan komputer. Ethernet Shield berbasiskan cip Ethernet Wiznet W5100. Ethernet Library digunakan dalam menulis program agar arduino board dapat terhubung ke jaringan dengan menggunakan arduino ethernet shield.
Pada Ethernet Shield terdapat sebuah slot micro-SD, yang dapat digunakan untuk menyimpan file yang dapat diakses melalui jaringan. Onboard micro-SD card reader diakses dengan menggunakan SD library.
Arduino board berkominikasi dengan W5100 dan SD card mengunakan bus SPI (Serial Peripheral Interface). Komunikasi ini diatur oleh library SPI.h dan Ethernet.h. Bus SPI menggunakan pin digital 11, 12 dan 13 pada Arduino Uno. Pin digital 10 digunakan untuk memilih W5100 dan pin digital 4 digunakan untuk memilih SD card. Pin-pin yang sudah disebutkan sebelumnya tidak dapat digunakan untuk input/output umum ketika kita menggunakan ethernet shield.
Karena W5100 dan SD card berbagi bus SPI, hanya salah satu yang dapat aktif pada satu waktu. Jika kita menggunakan kedua perangkat dalam program kita, hal ini akan diatasi oleh library yang sesuai. Jika kita tidak menggunakan salah satu perangkat dalam program kita, kiranya kita perlu secara eksplisit mendeselect-nya. Untuk melakukan hal ini pada SD card, set
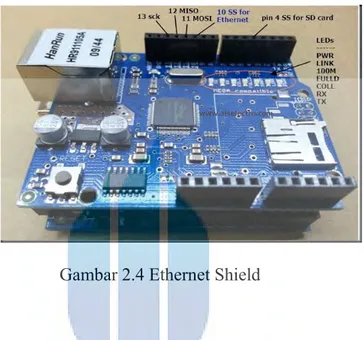
pin 4 sebagai output dan menuliskan logika tinggi padanya, sedangkan untuk W5100 yang digunakan adalah pin 10. Ethernet shield adalah sebuah clone dari arduino Ethernet shield. Penampakan Ethernet shield dapat dilihat pada gambar 2.4.
Gambar 2.4 Ethernet Shield
Ethernet Shield memiliki beberapa indicator LED sebagai berikut :
1. PWR : menampilkan board dan shield dalam kondisi menyala
2. LINK : menampilkan adanya aliran proses data yang ditandai dengan berkedipnya LED
3. FULLD : menampilkan bahwa jaringan terhubung dengan kondisi full
duplex
4. 100M : menampilkan kecepatan jaringan dalam sambungan
5. RX : menampilkan bahwa shield menerima data
6. TX : menampilkan bahwa shield mengirim data
2.4 MOTOR DC
Dalam kehidupan sehari – hari penggunaan motor DC dapat kita lihat pada motor starter mobil, pada tape recorder, pada mainan anak–anak, dan pada pabrik–pabrik, motor DC digunakan untuk elevator, conveyor, dan
sebagainya.
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor DC disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Untuk gambar Motor DC itu sendiri terlihat pada gambar 2.5.
2.4.1 Komponen Utama Motor DC
Adapun komponen utama yang dimiliki motor DC adalah sebagai berikut:
a. Kutub medan permanen.
Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan dinamo yang menggerakkan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan, yaitu kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi bukan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih kompleks terdapat satu atau lebih elektromagnet. Elektromagnet menerima supply dari luar sebagai penyedia arus medan (penguat terpisah). b. Armatur / Jangkar
Bila arus masuk menuju jangkar, maka arus ini akan menjadi elektromagnet. Jangkar yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, jangkar berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah kutub-kutub utara dan selatan.
c. Komutator
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam dinamo. Komutator juga membantu dalam transmisi arus antara dinamo dan sumber daya. Laju torsi dan arah dapat diubah sesuai beban bekerja pada tegangan rendah.
Konduktor yang mengalirkan arus akan merasakan gaya di dalam medan magnet.
2.4.2 Kelebihan dan Kekurangan Motor DC
Keuntungan utama motor DC adalah kecepatannya mudah dikendalikan dan tidak mempengaruhi kualitas pasokan daya. Motor DC ini dapat dikendalikan dengan mengatur :
a. Tegangan jangkar – meningkatkan tegangan jangkar akan meningkatkan kecepatan.
b. Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang, seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab risiko percikan api pada sikatnya. Selain itu motor DC juga relatif mahal dibanding motor AC.
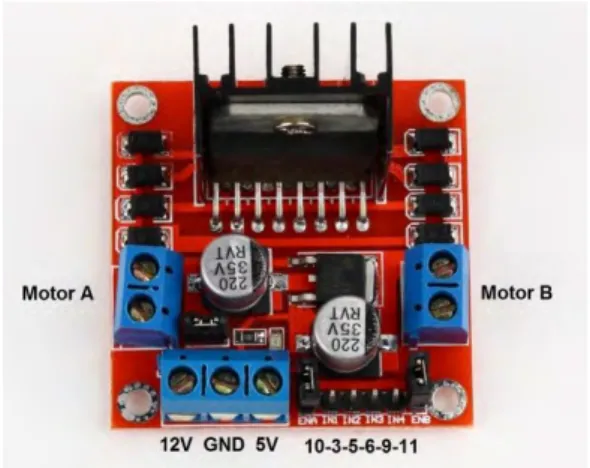
2.5 MOTOR DRIVER L298N
Motor Driver merupakan sebuah motor driver berbasis IC L298 dual H-bridge. Motor driver ini berfungsi untuk mengatur arah ataupun kecepatan motor DC. Diperlukannya rangkaian motor driver ini karena pada umumnya motor DC akan bekerja dengan membutuhkan arus lebih dari 250 mA. Untuk beberapa IC seperti keluarga ATMega tidak bisa memberikan arus melebihi nilai tersebut. Untuk gambar motor driver itu sendiri terlihat pada gambar 2.6.
Gambar 2.6 Motor Driver L298N
Prinsip kerja motor driver ini sesuai dengan bentuk rangkaian transistornya yang berupa H-bridge.
Gambar 2.7 H-bridge Transistor
Motor driver ini bekerja untuk menggerakan maksimal 2 motor DC terpisah atau bisa digunakan untuk 1 motor stepper bipolar 2 fasa, menggunakan masukan logic-level dari Arduino atau jenis kit mikrokontroler yang lain.
Pin-pinnya terdiri dari:
1. Out 1, Out 2 : Mengatur/menjalankan motor DC A
2. Out 3, Out 4 : Mengatur/menjalankan motor DC B
3. GND : Penghubung ground
6. In1, In2 : Mengatur masukan ke motor DC A
7. In3, In4 : Mengatur masukan ke motor DC B
8. EnB : Mengaktifkan PWM untuk motor DC B
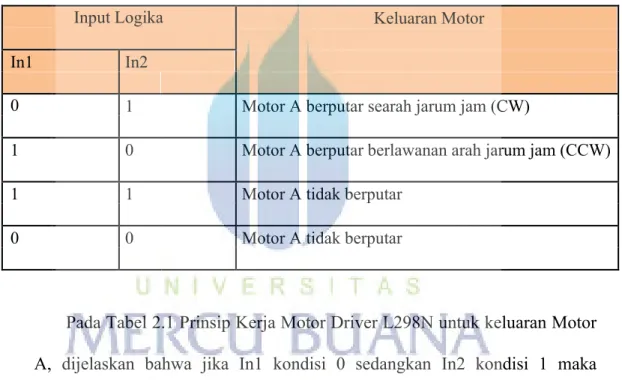
Prinsip kerja dari motor driver L298N dapat ditunjukkan pada Tabel 2.1 sebagai keluaran motor A dan Tabel 2.2 sebagai keluaran motor B
.
Tabel 2.1 Prinsip Kerja Motor Driver L298N Untuk Keluaran Motor A
Input Logika Keluaran Motor
In1 In2
0 1 Motor A berputar searah jarum jam (CW)
1 0 Motor A berputar berlawanan arah jarum jam (CCW)
1 1 Motor A tidak berputar
0 0 Motor A tidak berputar
Pada Tabel 2.1 Prinsip Kerja Motor Driver L298N untuk keluaran Motor A, dijelaskan bahwa jika In1 kondisi 0 sedangkan In2 kondisi 1 maka keluaran motor A berputar searah jarum jam (CW) dan sebaliknya In1 kondisi 1 sedangkan In2 kondisi 0 maka keluaran motor A berputar berlawanan arah jarum jam (CCW). Selanjutnya pada In1 dan In2 dengan kondisi 1 maupun 0 maka keluaran motor A tidak berputar.
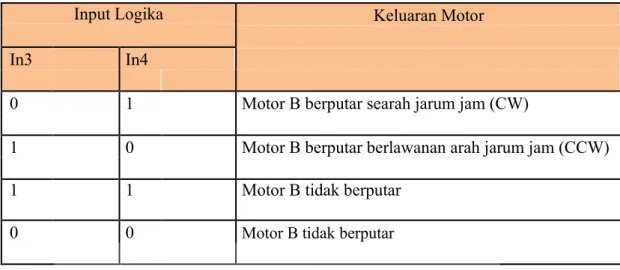
Tabel 2.2 Prinsip Kerja Motor Driver L298N Untuk Keluaran Motor B
Input Logika Keluaran Motor
In3 In4
0 1 Motor B berputar searah jarum jam (CW)
1 0 Motor B berputar berlawanan arah jarum jam (CCW)
1 1 Motor B tidak berputar
0 0 Motor B tidak berputar
Pada Tabel 2.2 Prinsip Kerja Motor Driver L298N untuk keluaran Motor A, dijelaskan bahwa jika In3 kondisi 0 sedangkan In4 kondisi 1 maka keluaran motor A berputar searah jarum jam (CW) dan sebaliknya In3 kondisi 1 sedangkan In4 kondisi 0 maka keluaran motor A berputar berlawanan arah jarum jam (CCW). Selanjutnya pada In3 dan In4 dengan kondisi 1 maupun 0 maka keluaran motor A tidak berputar.
Spesifikasi yang dimiliki modul motor driver L298N ini: Double H-bridge Drive Chip berupa L298N
Logical Voltage : 5V Drive Voltage : 5V-35V Logical Current : 0-36mA
Drive Current : 2A Max power: 25W
Dimensi : 43 x 43 x 26mm
2.6 LIQUID CRYSTAL DISPLAY (LCD)
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator, atau pun layar komputer. Pada postingan aplikasi LCD yang digunakan ialah LCD dot matrik dengan jumlah karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Jenis dan ukuran LCD bermacam-macam, antara lain 2x16, 2x20, 2x40 dan lain-lain.
2.6.1 Fitur LCD 16 x 2
Adapun fitur yang disajikan dalam LCD ini adalah : 1. Terdiri dari 16 karakter dan 2 baris.
2. Mempunyai 192 karakter tersimpan. 3. Terdapat karakter generator terprogram. 4. Dapat dialamati dengan mode 4-bit dan 8-bit. 5. Dilengkapi dengan back light.
Bentuk fisik LCD 16 x 2 di tunjukan pada gambar 2.8
2.6.2 Spesifikasi Kaki LCD 16 x 2
Spesifikasi kaki LCD 16 x 2 ditunjukan pada Tabel 2.3 Tabel 2.3 Spesifikasi Kaki LCD 16 x 2
Pin No. Deskripsi
1 Ground 2 Vcc 3 Pengatur kontras 4 “RS” Instruction/Register Select 5 “R/W” Read/Write LCD Registers 6 “EN” Enable
7-14 Data I/O Pins
15 Vcc
16 Ground
2.6.3 Modul I2C LCD
Yang dimaksud dengan I2C LCD adalah modul LCD yang dikendalikan secara serial sinkron dengan protokol I2C/IIC (Inter Integrated Circuit) atau
TWI (Two Wire Interface). normalnya, modul LCD dikendalikan secara
parallel baik untuk jalur data maupun kontrolnya.namun,jalur parallel akan memakan banyak pin di sisi kontroller (misal Arduino, android, komputer, dll). setidaknya akan membutuhkan 6 atau 7 pin untuk mengendalikan sebuah modul LCD.dengan demikian untuk sebuah kontroller yang “sibuk” dan harus banyak mengendalikan banyak I/O menggunakan jalur parallel adalah solusi yang kurang tepat.
Arduino sendiri sudah mendukung protokol I2C/IIC. Di papan arduino uno, port I2C terletak pada port A4 untuk jalur SDA (Serial Data) dan pin A5 untuk jalur SCL (Serial Clock). jangan lupa untuk menghubungkan jalur
melalui library’Wire.h’. Berikutnya, library ini akan dimanfaatkan untuk mengkonversi jalur parallel LCD menjadi jalur serial I2C.
Gambar 2.9 LCD I2C
Modul I2C converter ini menggunakan chip IC PCF8574 produk dari NXP sebagai kontrollernya. IC ini adalah sebua 8bit I/O expander for I2C bus yang pada dasarnya adalah sebuah shift register untuk alur komunikasi datanya, ditunjukkan pada gambar 2.10.
Gambar 2.10 Alur Komunikasi Data
2.7 SENSOR ULTRASONIK HC-SR 04
Sensor ultrasonik adalah sensor yang digunakan untuk melakukan pengukuran jarak. Sensor ultrasonik mampu mendeteksi jarak benda menggunakan gelombang ultrasonik. Gelombang ultrasonik adalah gelombang dengan besar frekuensi diatas frekuensi gelombang suara yaitu
lebih dari 20 KHz. (Arief, 2011). Gambar sensor Ultrasonic dapat dilihat pada gambar 2.11
Gambar 2.11 Sensor Ultrasonik HC-SR 04
Gambar 2.11 menunjukkan bentuk sensor ultrasonik. Sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik yang disebut receiver. Sinyal ultrasonik yang
dibangkitkan akan dipancarkan dari transmitter ultrasonik. Ketika sinyal
mengenai benda penghalang, maka sinyal ini dipantulkan, dan diterima oleh
reciever ultrasonik. Sinyal yang diterima oleh rangkaian receiver dikirimkan
ke rangkaian mikrokontroler untuk selanjutnya diolah untuk menghitung jarak terhadap benda di depannya(bidang pantul).
Sebelum menggunakan sensor Ultrasonic HC-SR 04 ini sebaiknya memahami terlebih dahulu prinsip kerja nya. Pada dasarnya prinsip kerja sensor Ultrasonic cukup mudah untuk dipahami, adapun skema prinsip kerja dapat dilihat pada gambar 2.12.
Gambar 2.12 Prinsip Kerja Sensor Ultrasonik HC-SR 04
Gambar 2.12 menjelaskan prinsip kerja dari sensor Ultrasonic HC–SR04, yaitu sebagai berikut:
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut
berfrekuensi diatas 20 kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40 kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonik.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal atau gelombang dengan kecepatan bunyi yang berkisar 340 m/s. 3. Untuk mengukur jarak menggunakan satuan cm sinyal diubah menjadi
0.034 cm/s. Sinyal tersebut kemudian akan dipantulkan oleh sebuah bidang dan akan diterima kembali oleh bagian penerima Ultrasonik. 4. Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal
tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus:
Berdasarkan Rumus 2.1 dapat dijelaskan bahwa :
S = Jarak antara sensor ultrasonik dengan bidang pantul.
t = Selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
2.8 SENSOR PROXIMITY INDUKTIF
Sensor Proximity adalah alat pendeteksi ada atau tidak sebuah obyek tanpa melakukan kontak fisik dengan obyek tersebut. Karakteristik dari sensor ini adalah mendeteksi obyek benda dengan jarak yang cukup dekat, berkisar antara 1 mm sampai beberapa centi meter saja sesuai tipe sensor yang digunakan.
Hampir di setiap mesin mesin produksi sekarang ini menggunakan sensor jenis ini, sebab selain praktis sensor ini termasuk sensor yang tahan terhadap benturan ataupun goncangan, selain itu mudah pada saat melakukan perawatan ataupun perbaikan dan penggantian.
Proximity Sensor terbagi dua macam, yaitu: 1. Proximity Induktif
2. Proximity Kapasitif
Proximity Induktif berfungsi untuk mendeteksi obyek besi/metal. Meskipun terhalang oleh benda non-metal, sensor akan tetap dapat mendeteksi selama dalam jarak (nilai) normal sensing atau jangkauannya. Jika sensor mendeteksi adanya besi di area sensingnya, maka kondisi keluaran sensor akan berubah nilainya. Proximity Kapasitif akan mendeteksi semua obyek yang ada dalam jarak sensingnya baik metal maupun non-metal.
Gambar 2.13 memperlihatkan salah satu tipe proximity sensor yaitu Autonics PR12- 4DN. Sensor ini memiliki jangkauan deteksi sejauh 4mm±10%. Tegangan suplai sebesar 12 VDC. Sensor ini termasuk sensor jenis tiga kabel, memiliki kabel hitam (BLACK), biru (BLUE) dan coklat (BROWN).
Gambar 2.13 Sensor Proximity Induktif
2.9 SENSOR FOTOELEKTRIK
Fotoelektrik adalah sensor yang digunakan untuk mendeteksi benda yang melewati radiasi sinar yang dipancarkan oleh sensor, yang kemudian dipantulkan kembali ke receiver sensor. Sensor ini bersifat seperti saklar. Apabila sensor mendeteksi benda maka saklar akan ON, apabila tidak mendeteksi benda maka sensor OFF. Suatu sensor dibagi dalam dua sub sistem yaitu:
1. Optical transmitter. 2. Optical receiver.
Sensor Fotoelektrik mempunyai 2 buah komponen utama yaitu pemancar dan penerima. Secara lebih detail kedua komponen tersebut adalah sebagai berikut:
1. Pemancar memiliki dua bagian yaitu :
a. Luminescent Diode yang juga dikenal dengan nama Light Emiting Diode (LED).
b. Dioda Laser
2. Penerima memiliki dua bagian yaitu : a. Photodioda
b. Phototransistor
2.9.1 Jenis-Jenis Dari Sensor Fotoelektrik
Terdapat 4 jenis sensor fotoelektrik yang tersedia yaitu : 1. Pemantulan Langsung (Direct Reflection)
Transmitter dan receiver ditempatkan bersama-sama dan menggunakan cahaya yang dipantulkan langsung dari objek untuk melakukan deteksi. Pemilihan photosensor jenis ini harus mempertimbangkan warna dan tipe permukaan objek (kasar, licin, buram, terang). Dengan permukaan buram, jarak sensing akan dipengaruhi oleh warna objek. Warna-warna terang berpengaruh terhadap jarak sensing maksimum dan warna gela berpengaruh terhadap jarak sensing minimum. Jika permukaan obyek mengkilap, efek permukaan yang lebih penting dari pada warna.
2. Refleksi dengan reflektor (Reflection with Reflector)
Transmitter dan receiver ditempatkan bersama-sama dan membutuhkan reflektor. Objek terdeteksi karenan memotong cahaya antara sensor dan reflektor sehingga receiver tidak menerima cahaya. Photocells ini memungkinkan jarak sensing lebih jauh. Dengan adanya reflector sinar yang dipancarkan akan dipantulkan sepenuhnya ke receiver.
3. Pemantulan terpolarisasi dengan reflektor (Polarized Reflection with Reflector)
Mirip dengan Pemantukan dengan reflektor, photocells ini menggunakan perangkat anti-refleks. Jadi reflector tidak mengkilap. Sensor ini mendasarkan fungsi pada sebuah pita cahaya terpolarisasi, memberikan keuntungan dan deteksi akurat bahkan ketika permukaan objek sangat mengkilap. Data teknik tidak ada karena sangat dipengaruhi oleh pemantulan acak (benda apa saja).
4. Through Beam
Transmitter dan Receiver ditempatkan secara terpisah dan deteksi obyek terjadi ketika memotong sinar antara transmitter dan receiver sehingga receiver kehilangan cahaya sesaat. Photocells ini memiliki jarak sensing terpanjang.
Gambar 2.14 Jenis Sensor Fotoelektrik
Tipe keluaran sensor fotoelektrik terbagi menjadi dua yaitu: Light ON - Receiver menerima sinar maka output/keluaran ON, ketika sinar terpotong oleh obyek maka output/keluaran OFF. Tipe kedua adalah Dark ON - Receiver menerima sinar maka output/keluaran OFF, ketika sinar terpotong oleh obyek maka output/keluaran ON.
Salah satu tipe sensor fotoelektrik adalah Autonics BJ100-DDT-P seperti yang diperlihatkan pada gambar 2.15. Sumber tegangan yang diperlukan 12-24 VDC ±10% dengan jarak jangkauan hingga 3 meter.
Sensor Fotoelektrik Autonics BJ100-DDT-P merupakan sensor fotoelektrik yang menggunakan pemantul (reflector) dan bekerja dengan mode operasi Dark ON. Sensor memiliki tiga buah kabel, hitam (BLACK), biru (BLUE) dan coklat (BROWN).
2.10 RELAY MY2 12VDC
Relay adalah alat yang dioperasikan dengan listrik yang secara mekanis mengontrol perhubungan rangkaian listrik. Relay adalah bagian yang penting dari banyak system control, bermanfaat untuk control jarak jauh dan untuk pengontrolan alat tegangan dan arus tinggi dengan sinyal control tegangan dan arus rendah. Ketika arus mengalir melalui electromagnet pada relay control elektro mekanis, medan magnet yang menarik lengan besi dari jangkar pada inti terbentuk. Akibatnya, kontak pada jangkar dan kerangka relay terhubung. Relay dapat mempunyai kontak NO (Normally Open) atau kontak NC (Normally Closed) atau kombinasi dari keduanya.
Dalam pemakaiannya biasanya relay yang digerakkan dengan arus DC dilengkapi dengan sebuah dioda yang diparalel dengan lilitannya dan dipasang terbaik yaitu anoda pada tegangan (-) dan katoda pada tegangan (+). Ini bertujuan untuk mengantisipasi sentakan listrik yang terjadi pada saat relay berganti posisi dari on ke off agar tidak merusak komponen di sekitarnya. Change Over (CO), relay mempunyai kontak tengah yang normal tertutup, tetapi ketika relay dicatu kontak tengah tersebut akan membuat hubungan dengan kontak-kontak yang lain.
Penggunaan relay perlu memperhatikan tegangan pengontrolnya serta kekuatan relay men-switch arus/tegangan. Biasanya ukurannya tertera pada body relay. Misalnya relay 12VDC/4 A 220V, artinya tegangan yang diperlukan sebagai pengontrolnya adalah 12Volt DC dan mampu men-switch arus listrik (maksimal) sebesar 4 ampere pada tegangan 220 Volt. Sebaiknya relay difungsikan 80% saja dari kemampuan maksimalnya agar aman, lebih rendah lagi lebih aman. Relay jenis lain ada yang namanya reedswitch atau relay lidi. Relay jenis ini berupa batang kontak terbuat dari besi pada tabung kaca kecil yang dililitin kawat. Pada saat lilitan kawat dialiri arus, kontak besi tersebut akan menjadi magnet dan saling menempel sehingga saklar menjadi aktif . Ketika arus pada lilitan dihentikan medan magnet hilang dan kontak kembali terbuka (off). Gambar 2.16 merupakan relay 12 VDC yang terdapat dibawah ini.
2.11 MOTOR SERVO
Motor servo adalah sebuah motor DC dengan sistem umpan balik
tertutup di mana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor
DC, serangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer
berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut
dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui
kaki sinyal dari kabel motor. Untuk gambar motor servo terlihat pada gambar 2.17.
Gambar 2.17 Motor Servo
2.11.1 Keunggulan dan Kelemahan Dari Motor Servo
Keunggulan dari penggunaan motor servo adalah:
1. Tidak bergetar dan tidak ber-resonansi saat beroperasi.
2. Daya yang dihasilkan sebanding dengan ukuran dan berat motor. 3. Penggunaan arus listik sebanding dengan beban yang diberikan.
4. Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang
dipakai.
Selain itu, motor servo juga memiliki beberapa kelemahan, yaitu:
1. Memerlukan pengaturan yang tepat untuk menstabilkan umpan balik. 2. Motor menjadi tidak terkendali jika encoder tidak memberikan umpan
balik.
3. Beban berlebih dalam waktu yang lama dapat merusak motor.
2.12 POWER SUPPLY
Power Supply adalah suatu perangkat yang dapat melakukan penurunan
tegangan listrik dari 220V AC menjadi 12V DC, 5V DC atau 3,3V DC. Yang digunakan disini yaitu 12V dan 5V DC, seperti gambar 2.18.
2.13 HYPERTEXT MARKUP LANGUANGE (HTML)
HTML merupakan singkatan dari Hypertext Markup Language. HTML digunakan untuk membangun halaman web, HTML digunakan untuk melakukan mark-up (penandaan) terhadap sebuah dokumen teks. Tanda tersebut digunakan untuk menentukan format atau style dari teks yang ditandai halaman web dibangun oleh kode-kode HTML.
HTML adalah bahasa markup yang umumnya digunakan, kepopuleran HTML disebabkan karena HTMLini mudah digunakan. Pembuatan dokumen web dengan HTML dapat dilakukan dengan mudah dan cepat. Dokumen web dapat tersaji dengan cepat ke banyak pembaca di seluruh dunia sekaligus. HTML mudah melakukan kontrol terhadap tampilan halaman web baik berupa teks, gambar, suara, animasi maupun video.
HTML berupa kode-kode tag yang mengintruksikan browser untuk menghasilkan tampilan sesuai dengan yang diinginkan. Sebuah file yang merupakan file HTML dapat dibuka dengan menggunakan web browser seperti Mozilla Firefox atau Microsoft Internet Exploler. HTML juga dapat dikenali oleh aplikasi pembuka email ataupun dari program Lin yang memiliki kemampuan browser.
HTML merupakan standar bahasa yang digunakan untuk menampilkan dokumen web, yang bisa dilakukan dengan HTML yaitu :
1) Menentukan format suatu teks
2) Membuat daftar tentang sekelompok hal
3) Membuat link ke dokumen lain atau bagian lain dari dokumen yang sama
5) Memberikan informasi dalam bentuk tabel
6) Memodifikasi, mengkontrol tampilan dari web page
7) Mempublikasikan dokumen secara online sehingga bisa diakses dari seluruh dunia
8) Membuat online form yang bisa digunakan untuk menangani pendaftaran
, transaksi secara online
9) Menambahkan objek-objek seperti image, audio, video, dan juga java
applet dalam dokumen HTML.
Hypertext Markup Language memiliki struktur penulisan sebagai berikut :
1. Elemen, terdiri dari atas tiga bagian, yaitu tag pembuka, isi, dan tag penutup. Contohnya untuk menampilkan judul dokumen HTML pada web browser digunakan element title, dimana : <title> ini adalah tag pembuka judul dokumen HTML.
2. Tag, adalah teks khusus (markup) berupa dua karakter “<” dan “>”, sebagai contoh <body> adalah tag dengan nama body. Tag ditulis secara berpasangan, yang terdiri atas tag pembuka dan tag penutup (ditambahkan karakter “/” setelah karakter “<”), sebagai contoh <body> ini adalah tag pembuka isi dokumen HTML, dan </body> ini adalah tag penutup isi dokumen HTML, yang merupakan tag-tag dasar dalam HTML adalah :
a. <HTML> </HTML>, digunakan untuk menandai awal dan akhir dari suatu file HTML.
b. <TITLE> </TITLE>, tulisan yang berada diantara tag <TITLE> dan </TITLE> akan ditampilkan oleh browser pada bagian title yang mana merupakan title dari jendela browser.
c. <HEAD> </HEAD>, berisi keterangan informasi, seperti title dan jenis dokumen, ditulis diantara HEAD tags.
d. <BODY> </BODY>, bagian ini manandai awal dan akhir dari badan dokumen HTML.