BAB II
DASAR TEORI
2. 1 Fotogrametri
Salah satu teknik pengumpulan data objek 3D dapat dilakukan dengan menggunakan teknik fotogrametri. Teknik ini menggunakan foto udara sebagai sumber data utamanya. Foto udara hasil pemotretan menyediakan suatu alternatif dalam penyediaan informasi 3D yang akan digunakan dalam penentuan nilai tinggi suatu objek topografi misalnya bangunan. Kualitas informasi yang dihasilkan sangat tergantung dari kualitas citra sumber data tersebut.
2.1.1 Pengamatan Stereoskopik
Pengamatan stereoskopik merupakan pengamatan daerah pertampalan sepasang foto udara yang akan membentuk suatu model stereo tiga dimensional. Pertampalan foto udara terjadi karena adanya hubungan antar foto di sepanjang garis sejajar yang disebut jalur terbang. Foto- foto tersebut dibuat sedemikian rupa sehingga daerah yang digambarkan oleh foto udara yang berurutan di dalam satu jalur terbang menggambarkan sebagian daerah yang tergambar pada foto sebelumnya.
Pengamatan foto stereoskopik dapat dilakukan dengan bantuan alat optik, dengan menggunakan prinsip mata kiri melihat objek pada foto kiri dan mata kanan melihat objek yang sama pada foto kanan. Hal tersebut biasanya digunakan pada daerah yang bertampalan sehingga dihasilkan daerah stereo (model).
Ada beberapa persyaratan untuk dapat melihat pasangan foto secara stereoskopik, yaitu [Wolf, 1995]:
1. daerah yang akan diamati secara stereoskopik difoto dari eksposur yang berbeda yaitu pada daerah pertampalannya.
2. skala dari kedua foto kurang lebih sama.
3. pasangan objek pada foto kiri dan kanan dan kedua mata kurang lebih harus dalam satu bidang yang sama atau sumbu optik kedua mata harus satu bidang.
2.1.2 Restitusi Foto Udara
Restitusi (restitution) dapat diartikan sebagai rekonstruksi foto udara dari hasil rekaman pasangan foto dalam 2D menjadi model 3D yang benar seperti pada saat pemotretan dilakukan. Model visualisasi ini kemudian dapat digunakan sebagai sumber pengadaan data spasial yang terkait dengan pembuatan peta. Pembentukan model 3D dari pasangan foto dilakukan melalui tahapan sebagai berikut :
a. Orientasi Dalam
Orentasi dalam pada hakekatnya adalah merekonstruksi berkas sinar dari foto udara seperti pada saat foto tersebut diambil oleh kamera. Berkas sinar yang berpasangan tersebut disimulasikan dengan memproyeksikan pasangan foto positifnya menggunakan proyektor.
b. Orientasi Relatif
Orientasi relatif merupakan penentuan kemiringan dan posisi relatif dua buah foto pasangan stereo. Dimana sasaran orientasi relatif ini adalah mengorientasikan dua buah foto sehingga setiap pasangan sinar yang sekawan dari dua foto tersebut berpotongan pada ruang.
Orientasi ini dapat dilakukan jika lima pasang sinar sekawan dari sepasang foto berpotongan, sehingga setiap pasang berkas sinar pada kedua foto akan berpotongan. Sedangkan pasangan sinar ke-enam digunakan sebagai pengecekan/ukuran lebih. Bila minimal 5 pasang sinar dapat dipertemukan, maka seluruh pasangan sinar dari kedua berkas akan saling berpotongan membentuk model 3D fiktif.
Pada instrumen restitusi analog yang dilakukan adalah menghilangkan paralaks y di 6 titik standard (minimal 5 titik + 1 titik untuk checking). Hasil model 3D yang terbentuk masih mempunyai kedudukan relatif dengan sistem koordinat sembarang. Oleh sebab itu proses ini disebut sebagai orientasi relatif.
Gambar 2.2. Visualisasi proses restitusi foto udara [Bobby Santoso,2004]
Absolute
Orientation
Relative
Orientation
Inner
Orientation
5 5 6 6 1 1 2 2 3 3 4 4Inner
Orientation
Relative
Orientation
Absolute
Orientation
X Y Z A B C D model absolutTitik 1,2,3,4,5 & 6 adalah
titik Standard atau titik Otto Von Gruber
PADA TAHAP INI MODEL RELATIF DITRANSFORMASIKAN KE DALAM SISTEM DEFINITIF/ ABSOLUT.
SECARA ANALOG DILAKUKAN DENGAN SCALLING DAN LEVELING
SEDANG DENGAN CARA DIGITAL ADALAH DENGAN TRANSFORMASI SEBANGUN 3D
UNTUK ORIENTASI ABSOLUT DIPERLUKAN TIGA ATAU EMPAT TITIK KONTROL DALAM SISTEM KOORDINAT DEFINITIF/ TANAH HASIL DARI ORIENTASI ABSOLUT ADALAH MODEL ABSOLUT YANG SIAP UNTUK DIDIGIT ATAU PLOT
HASIL DARI ORIENTASI RELATIF BERUPA MODEL RELATIF YANG MASIH DALAM SISTEM KOORDINAT INSTRUMEN (LOKAL)
DENGAN CARA DIGITAL, ORIENTASI RELATIF DAPAT MENGGUNAKAN SYARAT KESEGARISAN (COLLINEARITY CONDITION)
ELIMINASI DILAKUKAN DENGAN MENGATUR KOMBINASI SETTING LIMA ELEMEN ORIENTASI, YAKNI PADA TAHAP INI ENAM PASANG SINAR (MINIMAL LIMA) DIPERTEMUKAN SECARA ANALOG DENGAN MENGELIMINASI PARALAKS Y PADA ENAM TITIK STANDARD
A,B,C,D adalah titik KONTROL TANAH
x y z 5 6 1 2 3 4 model relatif PENEMPATAN DIAPOSITIF FOTO REKONSTRUKSI BERKAS SINAR FOTO KIRI DAN KANAN SECARA ANALOG MELIPUTI :
PADA PENYANGGA FOTO DI PROYEKTOR SEPERTI SAAT DI KAMERA
PENGESETAN PANJANG FOKUS
PROYEKTOR = KAMERA BERKAS SINAR KIRI DAN KANAN BELUM SALING BERPOTONGAN SATU DENGAN LAINNYA PENYERTAAN DATA KALIBRASI
Bx,by,bz
c. Orientasi absolut
Dalam orientasi absolut, model 3D relatif yang masih dalam sistem koordinat instrumen (sebarang) di transformasikan ke dalam sistem definitif. Pada tahap ini diperlukan minimal 3 titik kontrol model yang ditentukan sebelumnya (lihat triangulasi udara). Proses orientasi absolut sebenarnya merupakan penyamaan antara koordinat model dengan koordinat tanah. Sehingga dalam orientasi ini akan terdapat proses leveling (penegakan) dan scaling (penyekalaan). Bila dilakukan secara numerik, maka yang rumus yang digunakan adalah transformasi sebangun 3D. Untuk lebih jelasnya perhatikan gambar 2-2.
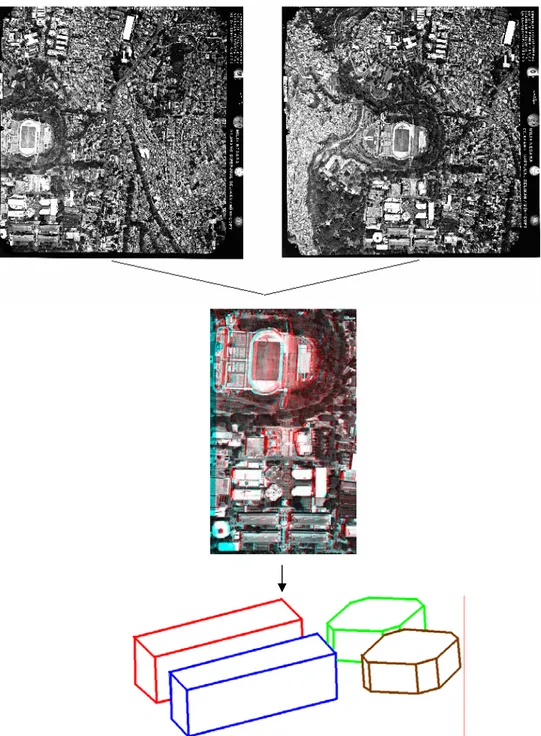
2.2 Ekstraksi Data 3D Secara Fotogrametri
Pada proses ekstraksi dilakukan pendigitasian yaitu suatu pekerjaan yang dilakukan untuk merubah bentuk data dari bentuk raster menjadi bentuk vektor. Pendigitasian dalam ekstraksi data 3D merupakan digitasi 3D dimana perubahan nilai ketinggian diperhatikan dan diperhitungkan dengan melakukan pengamatan 3D pada waktu pendigitan.
Pengamatan secara 3D dilakukan pada suatu model stereo 3D sehingga semua objek yang terdapat pada model tersebut memiliki koordinat 3D. Lihat gambar 2-3 untuk contoh proses ekstraksi data foto udara.
2.3 Digital Terrain Model (DTM)
Digital Terrain Model (DTM) adalah model digital dari tinggi relief bumi atau merupakan penggambaran model tinggi relief bumi dengan sebuah model di dalam computer. DTM bisa dipandang sebagai salah satu unsur dari peta digital. Namun realita menunjukkan bahwa masih banyak peta digital yang hanya berunsur planimetrik (2D) atau elevasi hanya merupakan satu atribut objek [Fahmi Amhar, 1999]. Beberapa cara menyajikan objek topografi berdasarkan dimensi geometrinya [Indri Purnamawati, 2005]:
1. 2.5D : Objek topografi didefinisikan berdasarkan koordinat planimetrik. Setiap titik dalam koordinat 2 dimensi tersebut memiliki informasi ketinggian yang disimpan dalam data attribute sebagai informasi tambahan.
2. 3D : Semua informasi objek topografi berada dalam dimensi geometric 3 dimensi, terutama koordinat titik. Dengan menggunakan teknik pemodelan 3 dimensi yaitu solid modeling, objek-objek infrastruktur buatan manusia dapat disajikan secara 3 dimensi. Teknik pemodelan ini dapat dilakukan secara non-automatic, semi-automatic maupun automatic.
2.3.1 Tinggi Titik (Spot Heights)
Tinggi titik memberikan informasi ketinggian dengan tepat di suatu tempat. Tinggi titik dipakai sebagai pelengkap dari garis kontur untuk menyatakan unsur- unsur permukaan bumi seperti tinggi rata- rata suatu dataran, tinggi terendah dari suatu jurang (cekungan) dan lain- lain.
dengan kerangka/ referensi yang sama. Overlay antara lain juga dapat dibedakan dalam dua bentuk, yaitu overlay poligon dan overlay grid. Grid sebenarnya merupakan salah satu bentuk satuan geografis, sehingga overlay grid dapat dilakukan secara numeris dengan menggunakan nomor sel grid sebagai referensi ruang.
Overlay merupakan bagian dari proses pengelolaan data yang dapat memanfaatkannya untuk mencapai ketepatan dan kecepatan yang lebih tinggi. Dan sebagaimana secara manual overlay dapat bersifat polygon dan grid, teknik digital juga mengenal dua bentuk tersebut. Dalam teknik digital, secara umum dikenal dua jenis data grafis, yaitu data raster yang berupa sel- sel grid, dan data vektor yang dinyatakan dalam bentuk pasangan koordinat geografis. Data vektor sendiri mempunyai beberapa macam struktur data, yaitu data arc dan data point/ line/ polygon [Opisar Sujatmiko, 1988].
1. Data arc : merupakan segmen garis tanpa label yang didefinisikan oleh simpul (node) pada kedua ujungnya.
Gambar 2-4. Contoh data arc
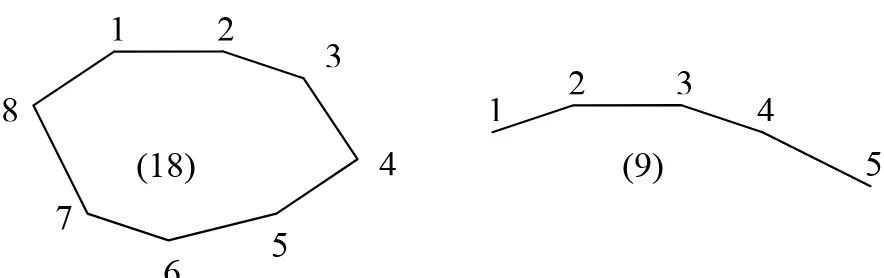
2. Data point, line, dan polygon : masing- masing merupakan titik, garis, dan area yang mempunyai label, dan tanpa node.
1 2 3 4 5 21 22
Gambar 2-5. Contoh data point, line, dan polygon
Keterangan: 1,2,3,… = point , = node
(18), (9) = nomor label
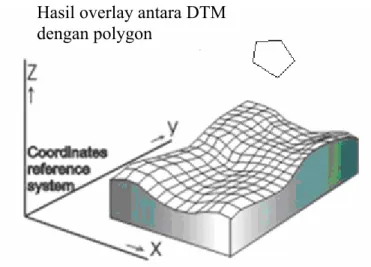
Pelaksanaan overlay secara digital tidak lepas dari proses pemasukkan data dan manipulasi- manipulasi data dalam rangka mempersiapkan data- data yang siap untuk dioverlaykan. Prinsip overlay dapat dicontohkan seperti gambar 2-6.
8 1 2 3 4 5 (9) 5 7 4 1 2 3 6 (18) 21 22 DTM polygon
Gambar 2-6. Contoh proses overlay data DTM dan data vektor.
2.5 Interpolasi
Salah satu definisi mengenai pengertian interpolasi yaitu metode penentuan nilai yang didasarkan pada sejumlah nilai acuan (reference points) dengan pendekatan fungsi matematik. Dalam bidang Geodesi dan Geomatika, interpolasi selalu digunakan dalam setiap pemodelan yang berhubungan dengan relief bumi. Secara harfiah, istilah interpolasi diambil dari dua kata latin, yaitu “inter” yang berarti di antara (between) dan “polire” yang berarti perbaikan (polish atau refine) [Agus Hikmat, et. al, 1999].
Hasil overlay antara DTM dengan polygon
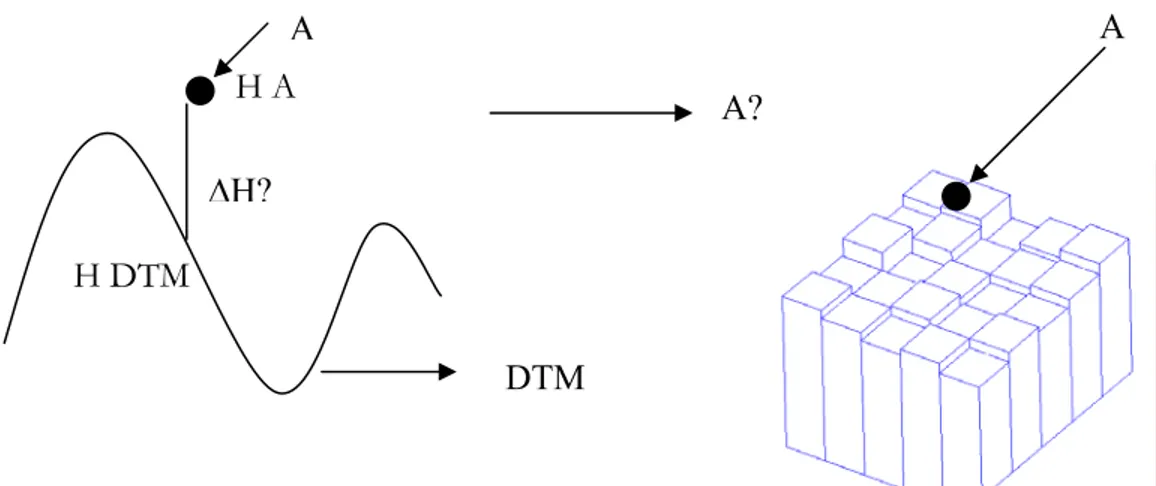
Gambar 2-7. Interpolasi
Tujuan dilakukannya interpolasi yaitu misalnya jika ada sebuah titik A yang didapat dari ekstraksi data foto udara yang akan di tumpangsusunkan (overlaying) dengan data DTM, tidak tahu akan berada pada posisi piksel yang mana. Untuk itulah perlu adanya interpolasi agar titik A tersebut lebih tepat berada pada posisi piksel yang mana sehingga nilai ∆H yang akan dicari bisa diketahui dengan menggunakan persamaan 3.1:
...persamaan (3.1) Keterangan : ∆H = Beda tinggi yang dicari
H = Tinggi DTM DTM
A?
A
Titik A di permukaan bumi Titik A di atas DTM yang berbentuk piksel A
∆H?
∆H = HDTM – HA H DTM
empat piksel terdekat (Cubic Interpolation), dan interpolasi bicubic menggunakan 16 piksle terdekat (BiCubic Interpolation).
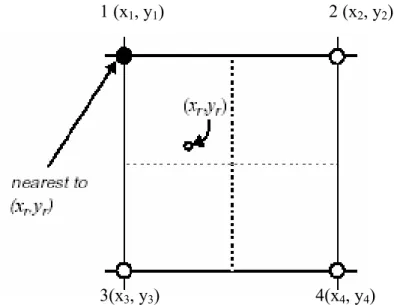
2.5.1 Metode Interpolasi Tetangga Terdekat (Nearest Neighbor Interpolation) Metode ini merupakan metode resampling paling sederhana. Prinsip dari metode ini yaitu bahwa nilai intensitas pixel pada koordinat baru ditentukan berdasarkan nilai intensitas pixel pada koordinat asal yang terdekat.
Gambar 2-8. Nearest Neighbor Interpolation
Keterangan: 1,2,3,4 = titik tengah piksel
r = titik yang akan dicari nilai tingginya xr, yr = koordinat titik r
Formulasi yang digunakan dalam penentuan metode interpolasi nearest neighbor ini yaitu [ERDAS, 1999]:
...persamaan (3.2)
1 (x1, y1) 2 (x2, y2)
3(x3, y3) 4(x4, y4)
Jadi sesuai dengan gambar di 2-8 maka nilai tinggi DTM titik (xr, yr) = nilai tinggi
DTM titik tengah piksel 1.
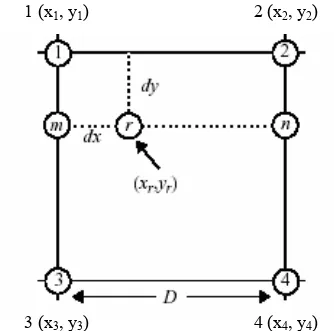
2.5.2 Metode Interpolasi Cubic (Cubic Interpolation)
Metode ini menginterpolasikan nilai DTM pada dua jarak orthogonal pada citra DTM yang terdiri dari empat pixel. Nilai DTM dihitung setelah dilakukan pembobotan jarak pixel pada citra DTM dengan keempat pixel yang mengelilinginya.
Gambar 2-9. Cubic Interpolation
Dimana: 1,2,3,4 = titik tengah piksel
r = titik yang akan dicari nilai tingginya
1 (x1, y1) 2 (x2, y2)
Vi D D dy D dx D Vr i × × − − =
∑
= 4 1 ) )( ( ...persamaan (3.3)Dimana: Vr = Nilai tinggi titik r yang dicari
Vi = Nilai tinggi DTM titik tengah piksel ke-i
Untuk menghitung nilai beda tinggi yang ingin dicari gunakan persamaan 3.1.
2.5.3 Metode Interpolasi BiCubic (BiCubic Interpolation)
Gambar 2-10. BiCubic Interpolation
Metode ini pada prinsipnya sama dengan metode interpolasi cubic. Perbedaannya terletak pada jumlah pixel yang digunakan. Metode bicubic menggunakan enam belas pixel di sekitar titik interpolasi. Perhatikan gambar 2-10 di atas.
Untuk menghitung nilai tinggi/ DTM yang dicari dari titik ujung- ujung gedung gunakan persamaan 3.4 [Yuliana Herman,2005].
∑
∑
= = = 16 1 16 1 2 ^ / 1 2 ^ / i i Li Li Zi Vr ………persamaan (3.4)Dimana: Vr = Nilai tinggi DTM titik r yang dicari
Li = Jarak antara piksel yang dicari dengan piksel baris ke-n, kolom ke-n yang mengelilinginya
Zi = Nilai DTM piksel baris ke-n, kolom ke-n
Disini diperlukan pembobotan jarak dari 16 piksel yang mengelilinginya dengan persamaan 3.5: L Li W n i / 1
∑
= = ...persamaan (3.5)Dimana: W = Nilai bobot
L = Jumlah jarak antara piksel yang dicari dengan keenam belas piksel yang mengelilinginya
![Gambar 2.2. Visualisasi proses restitusi foto udara [Bobby Santoso,2004] AbsoluteOrientationRelativeOrientationInnerOrientation556611223344InnerOrientationRelativeOrientationAbsoluteOrientationXYZABCDmodel absolut](https://thumb-ap.123doks.com/thumbv2/123dok/2171985.2165187/4.918.171.813.161.898/gambar-visualisasi-proses-restitusi-santoso-absoluteorientationrelativeorientationinnerorientation-innerorientationrelativeorientationabsoluteorientationxyzabcdmodel-absolut.webp)