6
BAB II
TEORI DASAR
2.1 Konsep Dasar Metode Gaya BeratMetode gaya berat merupakan salah satu metode geofisika yang pengukurannya berdasarkan pada perbedaan variasi medan gravitasi. Variasi medan gravitasi tersebut diakibatkan adanya persebaran massa jenis yang bervariasi akibat batuan penyusun bumi, struktur bawah pemukaan bumi, titik amat di permukaan bumi karena bentuk bumi yang tidak rata atau berundulasi.
Medan gravitasi bumi memiliki arah ke pusat bumi. Sedangkan, medan gravitasi anomali memiliki arah yang bervariasi terhadap sumbu vertikal yang bergantung pada kedudukan benda anomali. Di permukaan bumi perubahan medan gravitasi dapat diukur melalui pengukuran medan gravitasi bumi g (medan gravitasi bumi pada komponen vertikal). Perubahan medan gravitasi bumi yang disebabkan karena benda anomali lokal disebut dengan Anomali gravitasi dan dilambangkan sebagai Δg dan bernilai sangat kecil dibandingkan dengan medan gravitasi bumi itu sendiri Δg << g [7].
Konsep dasar metode gaya berat adalah hukum Newton yang menyatakan bahwa setiap benda memiliki gaya tarik menarik yang besarnya sama dengan hasil kali antar massa dan konstanta gravitasi serta berbanding terbalik dengan kuadrat jaraknya. Hukum Newton diilustrasikan pada Gambar 2.1.
Gambar 2.1 Hukum Newton tentang gaya tarik menarik antar dua buah benda
r
m
2F
m
17 Persamaan Hukum Gravitasi Newton:
𝐹 = 𝐺𝑚1. 𝑚2
𝑟2 (2.1)
Dimana :
F = gaya tarik menarik antara 2 benda m1 dan m2 (Newton)
G = konstanta gaya berat (6.67 x 10-11 m3/Kg s2) m1, m2 = masa benda 1 dan 2 (Kg)
r = jarak antara massa 1 dan 2 (m)
Metode gaya berat merupakan metode geofisika yang mengukur percepatan gravitasi bukan gaya gravitasi. Hukum Newton II yang menjelaskan bagaimana percepatan gravitasi berlaku jika ada sebuah percepatan yang berarah vertikal. Hukum Newton II mengenai gerak Newton, dijelaskan dalam persamaan:
𝐹 = 𝑚 . 𝑔 (2.2)
Jika persamaan (2.1) dan (2.2) dihubungkan maka akan mendapatkan persamaan: 𝐺𝑚1𝑚2
𝑟2 = 𝑚 . 𝑔 (2.3)
Dari persamaan matematis diatas dapat menghasilkan persamaan matematis yang menghubungkan gaya gravitasi dengan percepatan gravitasi seperti berikut:
𝑔 = 𝐺𝑀
𝑟2 (2.4)
8 2.2 Koreksi Data Gaya Berat
Metode gaya berat diukur menggunakan alat gravimeter di permukaan bumi yang dipengaruhi oleh posisi lintang, pengaruh pasang surut, guncangan pada pegas alat, perbedaan topografi dan variasi densitas di bawah permukaan bumi. Hal-hal yang mempengaruhi nilai percepatan gravitasi dalam pengukuran gaya berat, diperlukan koreksi-koreksi data gaya berat sebagai berikut:
1. Koreksi lintang (latitude correction)
2. Koreksi tidal/koreksi pasang surut (tide correction) 3. Koreksi apungan (drift correction)
4. Koreksi udara bebas (free air correction) 5. Koreksi bouguer (bouguer correction) 6. Koreksi topografi (terrain correction) 2.2.1 Koreksi Lintang (Lattitude Correction)
Bentuk bumi yang elipsoid mengakibatkan adanya perbedaan percepatan gravitasi pada lintang dan juga ekuator bumi terhadap kutub. Perbedaan percepatan gravitasi ini dipengaruhi juga oleh rotasi bumi. Maka perlu dilakukan koreksi lintang.
Spheroid referensi adalah suatu elipsoid oblate yang digunakan sebagai pendekatan
untuk muka laut rata-rata (geoid) dengan mengabaikan efek benda di atasnya. Spheroid
referensi diberikan oleh persamaan berikut ini.
𝑔(𝛷) = 978032.7 (1 + 0.0053024 𝑠𝑖𝑛2𝜃 − 0.0000058 𝑠𝑖𝑛2𝜃) (2.5) dimana 𝛷 adalah sudut lintang.
2.2.2 Koreksi Tidal/Koreksi Pasang Surut (Tide Correction)
Percepatan gravitasi di bumi dipengaruhi juga oleh benda di luar bumi seperti bulan dan matahari. Koreksi pasang surut dilakukan untuk menghilangkan faktor benda luar
9
bumi yang mempengaruhi percepatan gravitasi di bumi. Pengaruh benda diluar bumi yang mempengaruhi percepatan gravitasi di bumi dapat diilustrasikan pada Gambar 2.2.
Gambar 2.2 Pengaruh gaya berat bulan pada titik P di permukaan[9]
Secara matematis perhitungan koreksi pasang surut dapat dilakukan dengan menggunakan persamaan [10]. Persamaannya yaitu:
𝑈𝑝= 𝐺(𝑟) [( 𝑐 𝑅) 3 (cos 2𝜃𝑚+ 1 3) + 1 6 𝑟 𝑐( 𝑐 𝑅) 4 (5 cos 3𝜃𝑚+ 3 𝑐𝑜𝑠𝜃𝑚)] (2.6) Dimana : G(r) = konstanta gravitasi
Up = potensial di titik P akibat pengaruh bulan
𝜃m = posisi lintang
Bl = bulan Bm = bumi
c = jarak rata-rata ke bulan
r = jari-jari bumi ke titik P
10 2.2.3 Koreksi Apungan (Drift Correction)
Koreksi apungan (drift correction) merupakan koreksi yang dilakukan akibat adanya guncangan pada pegas gravimeter. Guncangan pada pegas gravimeter mengakibatkan perbedaan pembacaan percepatan gravitasi pada titik pengukuran yang sama pada waktu yang berbeda. Untuk mengatasi kesalahan tersebut, perlu dilakukan pengukuran dengan sistem tertutup (looping). Pernyataan matematis untuk mengetahui besar nilai kesalahan pembacaan alat yaitu:
𝐷𝑟𝑖𝑓𝑡 =𝑔𝐴′ − 𝑔𝐴
𝑡𝐴′−𝑡𝐴 (𝑡𝑛− 𝑡𝐴
) (2.7)
Dimana:
Drift : koreksi drift
gA : harga gravitasi di titik acuan waktu awal
gA’ : harga gravitasi di titik acuan waktu akhir
tA : waktu awal pengambilan data
tA’ : waktu akhir pengambilan data
tn : waktu pengamatan di titik pengamatan ke-n
2.2.4 Koreksi Udara Bebas (Free Air Correction)
Koreksi udara bebas merupakan koreksi yang dilakukan untuk menghilangkan efek perbedaan ketinggian yang dapat mempengaruhi pengukuran gaya berat pada mean sea
level (geoid). Koreksi ini dilakukan tanpa memperhitungkan nilai densitas pada mean sea level pada titik pengukuran. Perhitungan koreksi udara bebas dinyatakan dalam
persamaan:
𝐹𝐴𝐶 = −0,0385 ∗ ℎ (2.8)
11
h = ketinggian
Setelah dilakukan koreksi udara bebas maka akan didapatkan anomali udara bebas (free
air anomaly) yang dinyatakan dalam persamaan:
𝐹𝐴𝐴 = 𝑔𝑜𝑏𝑠 − 𝑔(𝛷) + 𝐹𝐴𝐶 (2.9)
FAA = free air anomaly
gobs = percepatan gravitasi titik pengukuran g(𝛷) = percepatan gravitasi lintang
FAC = free air correction
2.2.5 Koreksi Bouguer (Bouguer Correction)
Koreksi bouguer merupakan koreksi yang dilakukan untuk menghilangkan efek tarikan suatu massa yang berada pada titik pengamatan dan mean sea level. Suatu massa yang berada di antara titik pengamatan dan mean sea level dengan asumsi lapisan batuan tersebut berupa slab dengan ketinggian nilai titik pengukuran. Koreksi bouguer dinyatakan dalam persamaan :
𝐵𝐶 = 0.04185 ∗ 𝜌 ∗ ℎ (2.10)
Dengan:
𝜌 = densitas rata-rata (gr/cc)
H = elevasi (m)
12
Setelah dilakukan koreksi bouguer maka akan didapatkan anomali bouguer sederhana (Simple Bouguer Anomaly) yang dinyatakan dalam persamaan sebagai berikut:
𝑆𝐵𝐴 = 𝑔𝑜𝑏𝑠− 𝑔(𝛷) + 𝐹𝐴𝐶 − 𝐵𝐶 (2.11)
Dengan:
SBA = simple bouguer anomaly
FAA = free air anomaly
gobs = percepatan gravitasi titik pengukuran g(𝛷) = percepatan gravitasi lintang
FAC = free air correction BC = bouguer correction
2.2.6 Koreksi Topografi (Terrain Correction)
Koreksi topografi dilakukan untuk menghilangkan efek topografi pada permukaan bumi yang cenderung berundulasi dengan perbedaan elevasi besar, seperti adanya bukit atau lembah yang dapat mempengaruhi nilai percepatan gravitasi pada titik pengukuran. Koreksi topografi dilakukan dengan metode grafik menggunakan chart yang telah dibuat seperti Gambar 2.4 [12].
13 Koreksi medan dinyatakan dalam persamaan:
𝑇𝐶 =2𝜋𝐺𝜌
𝑛 (𝑟𝐿− 𝑟𝐷) (√𝑟𝐿
2− 𝑧2) − (√𝑟
𝐷2− 𝑧2) (2.12)
Dengan:
rL dan rD = radius luar dan radus dalam kompartemen
z = perbedaan elevasi rata-rata kompartemen
n = jumlah segmen dalam zona tersebut
Setelah dilakukan koreksi topografi maka akan didapatkan nilai anomali bouguer lengkap (Complete Bouguer Anomaly) yang dinyatakan dalam persamaan:
𝐶𝐵𝐴 = 𝑆𝐵𝐴 + 𝑇𝐶 (2.13)
2.3 Estimasi Densitas Bawah Permukaan Rata-Rata
Dalam metode gaya berat ada besaran fisis yang menjadi target utama untuk menganalisa daerah target tersebut melalui rapat massa batuan (perbedaan densitas), maka diperlukan nilai densitas rata- rata yang akan digunakan dalam proses pengolahan data hingga interpretasi data.
Rapat massa batuan dapat dipergaruhi oleh faktor-faktor seperti matriks pembentuk batuan, porositas, kandungan fluida yang ada pada pori- pori batuan dan masih banyak faktor lainnya. Dalam penentuan atau perhitungan densitas batuan ada beberapa cara yang dapat digunakan seperti:
2.3.1 Uji Laboratorium
Analisa penetuan densitas rata-rata batuan melalui uji laboratorium merupakan langkah yang dilakukan secara kualitatif. Metode uji laboratorium dilakukan dengan cara
14
mengambil sampel batuan yang mempresentasikan kondisi batuan yang berada di daerah penelitian yang kemudian diukur untuk mendapatkan nilai densitas rata-rata. 2.3.2 Metode Nettleton
Metode estimasi densitas nettleton merupakan metode estimasi densitas yang digunakan sesuai dengan densitas rata-rata di permukaan sehingga penampang atau profil anomali gaya berat menjadi lebih halus. Estimasi densitas menggunakan metode
nettleton didasarkan pada koreksi Bouguer dan koreksi Medan. Anomali Bouguer di
titik pengukuran pada suatu lintasan diplot dengan berbagai macam variasi nilai densitas. Pengukuran metode nettleton dilakukan dengan mengestimasi nilai densitas pemukaan terbaik dengan menerapkan korelasi silang antara perubahan ketinggian terhadap suatu referensi tertentu dengan anomali gaya beratnya. Nilai densitas terbaik diberikan oleh nilai yang memiliki korelasi terkecil.
15 2.3.3 Metode Parasnis
Metode parasnis merupakan metode estimasi densitas yang dilakukan dengan cara memplot nilai koreksi Bouguer dikurangi koreksi Medan (BC-TC) sebagai sumbu X terhadap nilai Free Air Anomaly (FAA) sebagai sumbu Y yang kemudian dibuat garis linear untuk mendapatkan persamaan garis dari kurva. Nilai persamaan garis tersebut merupakan densitas rata-rata batuan di daerah penelitian dengan persamaan sebagai berikut:
𝑔𝑜𝑏𝑠 − 𝑔(𝛷) + 𝑔𝐹𝐴 = 𝜌(𝑔𝑏𝑜𝑢𝑔𝑢𝑒𝑟 − 𝑇𝐶) (2.14) Dengan:
gFA = percepatan gravitasi free air anomaly
gobs = percepatan gravitasi titik pengukuran
g(𝛷) = percepatan gravitasi lintang gbouguer = percepatan gravitasi bouguer
TC = terrain correction
2.4 Pemisahan Anomali Regional dan Residual
Anomali gaya berat yang terukur di permukaan merupakan gabungan dari anomali regional dan residual. Untuk keperluan interpretasi, zona regional harus dipisahkan dari zona residual. Dalam proses pemisahan anomali regional dan residual dapat dilakukan dengan menggunakan transformasi fourier 2 dimensi. Salah satu filter yang dapat digunakan adalah filter Butterworth.
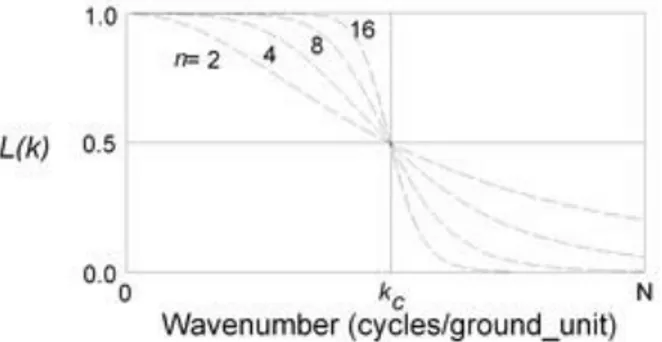
2.4.1 Filter Butterworth
Filter Butterworth memberikan harga respon maksimal yang datar pada frekuensi yang dilewatkan (passband) dan harga yang nol pada frekuensi yang di tapis (stopband). Filter ini dapat dilakukan dengan tapis lolos tinggi (high pass filter) dan tapis lolos
16
rendah (low pass filter). Fungsi transfer filter butterworth dinyatakan dalam persamaan: 𝐿 (𝑘) = 1 1 + [𝑘𝑘 𝑐] 𝑛 (2.15) Dengan: L(k) = Fungsi transfer
K = Bilangan gelombang (wavenumber) 𝑘𝑐 = Central wavenumber of filter
N = Nomor orde
Gambar 2. 6 Grafik filter Butterworth
Dalam pemisahan anomali regional dan residual dengan filter butterworth menggunakan analisis spektral (radially average power spectrum), sistem dari radially
average power spectrum yaitu melakukan analisis spektrum secara keseluruhan pada
peta complete bouguer anomaly (CBA). Dari radially average power spectrum akan dilakukan cut-off pada panjang gelombang berdasarkan kecuramannya. Untuk mengetahui panjang gelombang pada filter butterworth dapat menggunakan persamaan:
17 λ =1
𝑘𝑥 1000 (2.16)
Dengan:
λ = Panjang gelombang
k = Nilai batas gelombang anomali (cycle/ Ground unit)
Dalam penentuan kedalaman dapat menggunakan persamaan: h = 𝑆
4𝜋 (2.17)
Dimana:
h = kedalaman (m) S = slope (m)
Untuk slope didapat dari hubungan Ln Power dengan bilangan gelombang. 2.4.2 Second Vertical Derivative (SVD)
Second Vertical Derivative (SVD) merupakan pemisahan anomali yang dimana
hasilnya merupakan anomali residual. Second Vertical Derivative (SVD) didapatkan dari penurunan persamaan Laplace:
∇2∆𝑔 = 0 (2.18) ∇2∆ 𝑔= 𝜕2(∆𝑔) 𝜕𝑥2 + 𝜕2(∆𝑔) 𝜕𝑦2 + 𝜕2(∆𝑔) 𝜕𝑧2 (2.19) Sehingga, 𝜕2(∆𝑔) 𝜕𝑥2 + 𝜕2(∆𝑔) 𝜕𝑦2 + 𝜕2(∆𝑔) 𝜕𝑧2 = 0 (2.20)
18 𝜕2(∆ 𝑔) 𝜕𝑧2 = − [ 𝜕2(∆ 𝑔) 𝜕𝑥2 + 𝜕2(∆ 𝑔) 𝜕𝑦2 ] (2.21)
Untuk penampang 1D persamaannya menjadi: 𝜕2(∆ 𝑔) 𝜕𝑧2 = − [ 𝜕2(∆ 𝑔) 𝜕𝑥2 ] (2.22)
Dari persamaan diatas dapat dinyatankan bahwa Second vertical derivative dari suatu anomali gaya berat adalah sama dengan negatif dari turunan orde 2 horizontalnya, artinya SVD dapat ditentukan melalui turunan orde 2, maka:
∆"𝑔 = 𝑔𝑖− 𝑔𝑖−1 ∆𝑥 − 𝑔𝑖+1− 𝑔𝑖 ∆𝑦 ∆𝑥2 (2.23) Sehingga, ∆"𝑔 =𝑔𝑖+1− 2𝑔𝑖+ 𝑔𝑖−1 ∆𝑥2 (2.24)
Anomali yang disebabkan terdapatnya suatu stuktur cekungan wajib mempunyai nilai absolut minimum SVD selalu lebih besar daripada nilai absolut maksimalnya. Sebaliknya anomali yang diakibatkan struktur intrusi berlaku kebalikannya, nilai absolut minimalnya lebih kecil dari harga maksimalnya sehingga analisa struktur pada SVD bisa dilihat pada Gambar 2.7[8].
19
Gambar 2. 7 Respon analisa SVD dalam Struktur Geologi[8] Dalam karya penulisannya, Bott (1962) menyatakan bahwa:
a. Untuk jenis patahan naik
(𝜕 2(∆ 𝑔) 𝜕𝑥2 ) 𝑚𝑎𝑘𝑠 < |(𝜕 2(∆ 𝑔) 𝜕𝑥2 )| 𝑚𝑖𝑛 (2.25)
b. Untuk jenis patahan turun
(𝜕 2(∆ 𝑔) 𝜕𝑥2 ) 𝑚𝑎𝑘𝑠 > |(𝜕 2(∆ 𝑔) 𝜕𝑥2 )| 𝑚𝑖𝑛 (2.26)
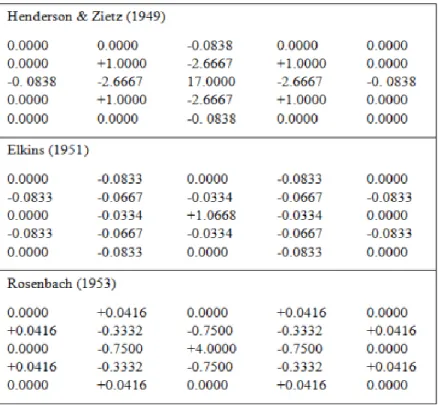
Terdapat beberapa operator filter SVD pada Gambar 2.8, yang dihitung oleh Henderson dan Zeits, Elkins dan Rosenbach.
20
Gambar 2. 8 Operator Filter Second Vertical Derivative
2.5 Forward Modelling Metode Talwani
Pemodelan ke depan (Forward Modelling) merupakan proses perhitungan data hasil teori yang akan teramati di permukaan bumi jika parameter model diketahui. Saat melakukan interpretasi, dilakukan pemodelan yang menampilkan respon yang sama atau cocok dengan data pengukuran di lapangan. Sehingga diharapkan model yang ditampilkan dapat mewakili atau mendekati kondisi sebenarnya. Dalam prosesnya,
forward modelling menggunakan proses Trial and Error. Trial and Error adalah proses
coba-coba atau tebakan untuk memperoleh kesesuaian antara data teoritis dengan data lapangan. Diharapkan dari proses trial and error ini diperoleh model yang cocok responnya dengan data[15].
Forward Modeling melibatkan penghitungan efek yang dihasilkan oleh model
21
parameter model yang dibuat sehingga menghasilkan efek yang memiliki korelasi yang dapat “diterima” dengan anomali residual. Kecocokan yang dapat “diterima” antara anomali residual dan efek dari model bersifat sangat subjektif dan mungkin berbeda-beda karena interpreter, kondisi geologi dan pengontrol geofisika bawah permukaan, tujuan, dan sumberdaya. Forward Modeling dapat diilustrasikan pada Gambar 2.9.
Gambar 2. 9 Elemen geometri yang berkaitan dengan gayatarik gravitasi dari poligon dengan n-sisi[16]
Pemodelan kedepan untuk menghitung efek dari gaya berat model benda dibawah permukaan dengan penampang berbentuk sembarang yang dapat diwakili oleh satu poligon bersisi-n dinyatakan sebagai integral garis sepanjang sisi-sisi poligon.
𝑔 = 2𝐺𝜌∮ 𝑧 𝑑𝜃 (2.27)
Intergral garis tertutup tersebut dinyatakan sebagai jumlah integral garis setiap sisinya, sehingga dapat ditulis sebagai berikut:
𝑔 = 2𝐺𝜌 ∑ 𝑍𝑖 𝑛
𝑖=1
(2.28) Model benda anomali sembarang oleh talwani didekati dengan poligon-poligon dengan sistem koordinat kartesian yang digambarkan seperti diatas. Untuk benda poligon sederhana, dapat ditunjukkan dengan persamaan sebagai berikut:
22 𝑍𝑖= ∫ 𝑎𝑖𝑡𝑎𝑛𝜃𝑡𝑎𝑛∅𝑖 𝑡𝑎𝑛∅𝑖− 𝑡𝑎𝑛𝜃 𝑑𝜃 𝑐 𝑏 (2.29) Sehingga diperoleh: 𝑍𝑖= 𝑎𝑖𝑠𝑖𝑛∅𝑖𝑐𝑜𝑠∅𝑖{(𝜃𝑖− 𝜃𝑖+1)+ 𝑡𝑎𝑛∅𝑖 ∗ 𝑙𝑛 ( 𝑐𝑜𝑠𝜃𝑖(𝑡𝑎𝑛𝜃𝑖 − 𝑡𝑎𝑛∅𝑖) 𝑐𝑜𝑠𝜃𝑖+1(𝑡𝑎𝑛𝜃𝑖+1 − 𝑡𝑎𝑛∅𝑖))} (2.30) Dengan: 𝑎𝑖 = 𝑥𝑖+1− 𝑧𝑖+1cot ∅𝑖 = 𝑥𝑖+1+ 𝑧𝑖+1( 𝑥𝑖+1− 𝑥𝑖 𝑧𝑖− 𝑧𝑖+1 ) (2.31) 𝜃𝑖 =𝑡𝑎𝑛−1 𝑥𝑖 𝑧𝑖 (2.32) ∅𝑖=𝑡𝑎𝑛−1( 𝑧𝑖+1− 𝑧𝑖 𝑥𝑖+1− 𝑥𝑖 ) (2.33)
Akurasi metode ini dipengaruhi oleh seberapa dekatnya poligon berhimpit dengan benda, dan dapat meningkat dengan menambah sisi dari poligon. Dengan begitu bentuk benda dua dimensi yang tak beraturan dapat dengan mudah diperkirakan oleh poligon dibanding dengan kotak[16].
Pemodelan Talwani 2,5D pada pemodelan anomali gaya berat dengan menggunakan bentuk anomali 2,5D yaitu model 2D dengan penampang berhingga yang sama pada arah tegak lurus dengan bidang 2D-nya.
2.6 Patahan
Struktur patahan dapat terbentuk jika suatu batuan mengalami tekanan yang cukup kuat, sehingga sifat plastis batuan tidak dapat menahan keelastisitasannya. Terdapat lima tipe patahan, yaitu normal fault, reverse fault, strike-slip fault, oblique-slip fault, dan rotation fault[17].
23 2.6.1 Normal Fault
Normal Fault merupakan patahan yang arah gerak blok batuannya bergerak mengkuti
arah gravitasi, yaitu ke bawah sepanjang bidang patahan seperti pada Gambar 2.11.
Gambar 2. 10 Normal fault[17] 2.6.2 Reverse Fault
Reverse Fault merupakan patahan yang arah gerak blok batuannya bergerak
berlawanan dengan arah gerak normal fault, yaitu mengarah ke atas seperti pada Gambar 2.11.
Gambar 2. 11 Reverse fault[17] 2.6.3 Strike-slip Fault
Striek-slip Fault merupakan patahan yang arah gerak blok batuannya bergerak
24
Gambar 2. 12 Strike-slip Fault[17] 2.6.4 Oblique-slip Fault
Oblique-slip Fault merupakan patahan yang arah gerak blok batuannya bergerak saling
menjauhi dalam arah mendatar atau arah lain, sehingga membentuk jurang yang lebar seperti pada Gambar 2.13.
Gambar 2. 13 Oblique-slip Fault[17] 2.6.5 Rotation Fault
Rotation Fault merupakan patahan yang arah gerak blok batuannya bergerak memutar
25
Gambar 2. 14 Rotation Fault[17] 2.7 Sistem Panas Bumi
Sistem panas bumi merupakan suatu bentuk energi panas yang tersimpan dalam batuan di bawah permukaan bumi dan fluida yang terkandung di dalamnya. Sistem panas bumi dapat ditemukan di daerah yang memiliki suhu bawah permukaan di atas normal yang semakin mendekati batas lempeng maka suhunya semakin tinggi. Sistem panas bumi secara umum yaitu:
2.7.1 Sumber Panas (Heat Source)
Sumber panas pada sistem panas bumi dapat terdiri dari instrusi batuan, dapur magma
(magma chambers) atau kondisi bawah permukaan yang memiliki temperatur yang
tinggi. Gunung api merupakan sumber panas yang sangat berpotensi dalam suatu sistem panas bumi. Sehingga daerah yang berada pada jalur gunung api berpotensi memiliki sistem panas bumi dengan temperatur tinggi.
2.7.2 Fluida Panas Bumi (Geothermal Fluid)
Fluida panas bumi berasal dari air permukaan (meteoric water) yang masuk ke bawah permukaan melalui rekahan ataupun ruang antar butir batuan. Fluida juga dapat berasal dari batuan dalam bentuk air magmatik (juvenile water). Fluida tersebut akan terakumulasi pada reservoar dan dipanaskan oleh sumber panas (heat source).
2.7.3 Reservoar Panas Bumi (Geothermal Reservoar)
Reservoar panas bumi merupakan batuan yang memiliki porositas dan permeabilitas yang baik sehingga fluida dapat terakumulasi untuk dipanaskan oleh sumber panas.
26
Reservoar juga berfungsi sebagai menyimpan uap dan air panas dari hasil pemanasan (konvektif dan konduktif).
2.7.4 Batuan Penutup (Caprock)
Batuan penutup (caprock) memiliki fungsi sebagai pelindung agar fluida panas bumi bumi tidak bocor dari reservoar. Batuan penutup harus berupa lapisan batuan yang bersifat kedap (permeabilitas rendah). Sistem panas bumi dapat diilustrasikan pada Gambar 2.15.
Gambar 2. 15 Model konseptual sistem panas bumi yang menunjukan arah aliran air (panah biru) dan arah arus konveksi fluida (panah merah) [18]
![Gambar 2.2 Pengaruh gaya berat bulan pada titik P di permukaan[9]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/4.918.263.706.278.447/gambar-pengaruh-gaya-berat-bulan-pada-titik-permukaan.webp)
![Gambar 2. 4 Hammer chart untuk menghitung koreksi medan[13]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/7.918.373.590.784.994/gambar-hammer-chart-untuk-menghitung-koreksi-medan.webp)
![Gambar 2. 5 Estimasi nilai densitas dengan metode Nettleton[8]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/9.918.358.610.565.947/gambar-estimasi-nilai-densitas-dengan-metode-nettleton.webp)
![Gambar 2. 7 Respon analisa SVD dalam Struktur Geologi[8]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/14.918.173.823.170.524/gambar-respon-analisa-svd-dalam-struktur-geologi.webp)
![Gambar 2. 9 Elemen geometri yang berkaitan dengan gayatarik gravitasi dari poligon dengan n-sisi[16]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/16.918.361.629.333.548/gambar-elemen-geometri-berkaitan-gayatarik-gravitasi-poligon-sisi.webp)
![Gambar 2. 10 Normal fault[17]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/18.918.354.615.295.456/gambar-normal-fault.webp)
![Gambar 2. 12 Strike-slip Fault[17]](https://thumb-ap.123doks.com/thumbv2/123dok/4481169.3247308/19.918.375.588.175.357/gambar-strike-slip-fault.webp)
