8
BAB II
LANDASAN TEORI
2.1 Perkembangan Robot di Indonesia
Sebenarnya sejak tahun 1980-an pengembangan dan penggunaan mesin otomatis di Indonesia telah dilakukan terutama pada kelompok industri strategis, seperti PT Pindad (Perindustrian Angkatan Darat) yang berfokus pada sistem dan peralatan yang menunjang hajat hidup orang banyak. PT LEN Industri yang bergerak pada bidang IT, perangkat lunak, dan energi. PT Bharata dan PT BBI (Boma Bisma Indra) yang bergerak dalam bidang pengecoran presisi untuk membuat bagian-bagian mesin. Selain itu PT DI (Dirgantara Indonesia) dan banyak lagi.
Pada tahun 2001, Kementerian Riset dan Teknologi bekerja sama dengan Departemen Pendidikan Nasional telah mempromosikan Kontes Robot Indonesia dalam pameran Ristek tahunan, yaitu RITECH EXPO (Research, Inovation, Technology Expo) di Balai Sidang Jakarta. Robotika di Indonesia terus berkembang
dari zaman ke zaman dengan efek yang sangat bervariasi untuk setiap sisi kehidupan. Perkembangan robotika dalam dunia pendidikan akan mempengaruhi gaya dan proses pembelajaran. Pengaruh ini cukup terlihat dalam dunia ilmu komputer.
2.2 Perkembangan dan Sejarah LEGO Mindstorm EV3
LEGO Mindstorm EV3 pertama kali diluncurkan pada musim panas tahun 2013, tapi cerita sebenarnya dimulai lima belas tahun sebelumnya, pada musim gugur 1998. Ketika LEGO memperkenalkan MINDSTROMS pertama kali adalah The Robotic Invention System (RIS) dengan brick Robotic Control Explorer ( RCX ) yang dapat diprogram, itu merupakan evolusi dari lima dekade teknik konstruksi modular dari LEGO. Beberapa tahun menggunakan dengan metode pendidikan berbasis komputer dari Massachusetts Intitute of Technology ( MIT ).
Lego telah memproduksi mainan konstruksi sejak tahun 1940-an, dimulai dengan membangun blok-blok dan dan berakhir dengan potongan-potongan yang sangat teknis saat ini yang meliputi beams, motor dan gear. Meskipun gaya bangunan telah berubah potongan baru dirancang agar kompatibel dan saling beroperasi dengan yang lama.
The Robotic Invention System (RIS) yang berevolusioner karena, untuk pertama kalinya orang dapat dengan mudah berbagi penemuan yang rumit. Setiap orang dapat membangun persis penemuan yang sama tanpa keterampilan tradisional seperti pertukangan, logam, elektronik dan pemrograman. Itu juga merupakan keuntungan bagi lembaga pendidikan dari yang dibutuhkan platform tahan lama dan dapat digunakan kembali untuk laboratorium rekayasa proyek.
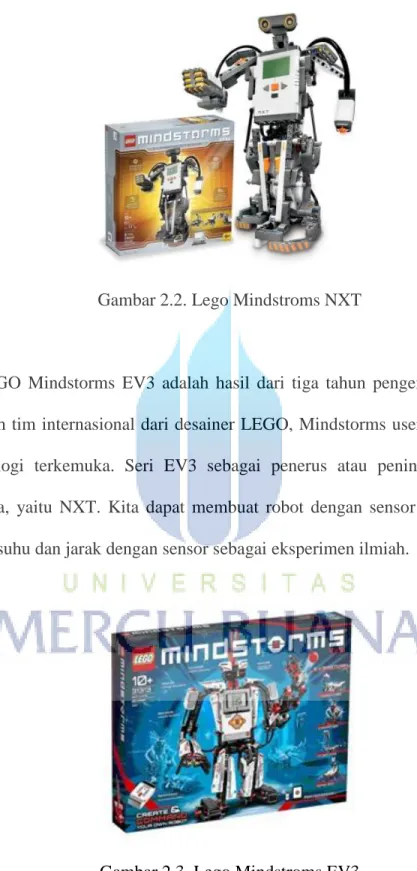
LEGO Mindstorms NXT adalah perangkat robot edukasional keluaran LEGO. Seri NXT sebagai penerus atau peningkatan dari seri sebelumnya, yaitu RIS (Robotics Invention System) yang sukses di pasaran. Penggunaan Mindstorms NXT membantu mempermudah pembuatan robot. Hal ini dikarenakan Mindstorms NXT menghilangkan kebutuhan untuk menyolder sirkuit dan menghilangkan kesulitan saat pemasangan motor. Robot yang dibuat menggunakan LEGO tidak dapat dianggap sebagai sebuah robot final, tapi dapat dianggap sebagai sebuah model.
Gambar 2.2. Lego Mindstroms NXT
LEGO Mindstorms EV3 adalah hasil dari tiga tahun pengembangan produk oleh sebuah tim internasional dari desainer LEGO, Mindstorms user-penggemar dan ahli teknologi terkemuka. Seri EV3 sebagai penerus atau peningkatan dari seri sebelumnya, yaitu NXT. Kita dapat membuat robot dengan sensor dan motor, atau mengukur suhu dan jarak dengan sensor sebagai eksperimen ilmiah.
2.3 Robot Lego Mindstorm EV3
Seiring dengan perkembangan teknologi yang cukup pesat ini, robot bukan lagi pada suatu konsep yang sulit seperti yang kita tahu sebelumnya, namun robot merupakan bentuk alat bantu manusia yang dapat diaplikasikan pada kehidupan sehari-hari. Dengan kreatifitas generasi muda dan kalangan professional dalam mendesain dan membuat program pada robot, pemrograman terhadap device robotika dapat dilakukan dengan menggunakan high level language, atau menggunakan drag and drop.
Inovasi ini akan menjadi terobosan baru dalam hal pemrograman terhadap peralatan robotika, sehingga teman-teman pelajar akan dipermudah dalam penerapan segi elektriknya dan dapat lebih berkonsentrasi terhadap perintah-perintah logikanya. Selain dari kemudahan yang ditawarkan oleh Robot LEGO EV3 Mindstorm, perangkat robotika LEGO juga memiliki kelebihan antara lain :
Dapat dibentuk sesuai dengan imaginasi (mobil, helikopter, robot, mesin, dan lain-lain).
EV3 Mindstorms dioperasikan dengan program.
Program berbasis drag and drop (user friendly).
Robot, kendaraan, dan mesin dibentuk dari EV3 Brick. Terdapat satu processor ARM9 untuk menggerakkan motor, berdasarkan input dari sensor-sensor. Sensor-sensor yang dapat digunakan dalam perangkat LEGO Mindstorm adalah sensor: cahaya, suara, warna, tekanan, dan ultrasonik.
Robot LEGO EV3 Mindstorm membuat pekerjaan yang berhubungan dengan elektronika, misalnya kebutuhan menyambungkan beberapa perangkat dengan solder, mengukur tegangan dari peralatan elektrik menjadi tidak ada. Pengguna dapat merkait Robot LEGO EV3 Mindstorm layaknya merakit mainan lego, dan melakukan programming dengan cara melakukan drag and drop diatas user interface Robot LEGO EV3 Mindstorm.
2.4 Komponen LEGO Mindstorm EV3
Ada beberapa jenis Lego Mindstorm EV3 yang beredar dipasaran yaitu :
Lego Mindstorm EV3 Retail Kit (Diperuntukkan untuk hobi dan perorangan).
Lego Mindstorm Education EV3 Core Set (Diperuntukkan untuk kebutuhan lembaga pendidikan).
Selain kedua jenis LEGO Mindstorms EV3 diatas, LEGO Mindstorms EV3 juga menyediakan paket aksesoris yang didalamnya terdapat motor, lego, dan sensor tambahan sebagai pelengkap paket LEGO Mindstorms EV3 standard. Paket standard dari robot LEGO Mindstorms EV3 memiliki beberapa komponen, antara lain :
2.4.1 EV3 Brick
Gambar 2.4. EV3 Brick
Brick adalah komponen paling penting dari robot EV3, karena berfungsi sebagai pengendali (otak dan sumber tenaga robot EV3). Program yang sudah dibuat dapat di-upload ke EV3 Brick untuk di compile.
Spesifikasi teknis dari EV3 Brick, yaitu :
ARM9 main microprocessor @300 MHz (16 MB flash memory, 64 MB RAM ditambah slot ekspansi micro SD hingga 32 GB).
LCD display 178 x 128 pixel.
Bluetooth V2.1.
Satu port USB 2.0 interface memungkinkan untuk konektivitas WiFi.
Empat port input : port 1, port 2, port 3, dan port 4 yang menghubungkan hingga 4 sensor pada saat yang sama termasuk sensor NXT.
Empat port output : port A, port B, port C, dan port D yang menghubungkan hingga 4 motor.
Tiga tombol : kembali, pusat, navigasi (kiri, kanan, atas, bawah).
Kompatibel untuk iOS dan Android
Penggunaan dua processor membuat Lego Mondstorm EV3 dapat menjalankan lebih dari satu Thread pada program. Hal ini disebabkan oleh adanya 2 (dua) processor yang mengerjakan fungsi yang berbeda pada saat bersamaan. Mikrocontroller ARM9 berfungsi sebagai master controller yang fungsi utamanya mengatur jalur komunikasi. Fungsi dari mikrokontroler (PMW) untuk mengendalikan empat motor, serta Analog to Digital Converter (ADC) dari terminal masukan. Brick dapat menerima masukan dari 4 sensor, dan menjalankan 4 motor sekaligus, dengan bentuk seperti dibawah ini:
Tampilan pada layar LCD brick adalah sebagai berikut :
Gambar 2.6. Tampilan pada layar LCD brick
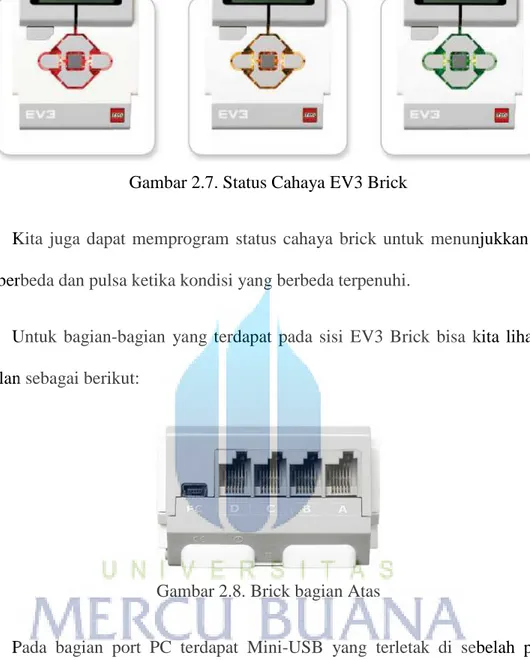
Status cahaya pada brick yang mengelilingi Buttons Brick memberitahu kita, status keadaan EV3 Brick saat ini.
Cahaya pada Buttons Brick dapat menjadi hijau, oranye, atau merah dan dapat pulsa. Kode status cahaya Buttons Brick adalah sebagai berikut:
Merah = Startup, Updating, Shutdown
Red berdenyut = Sibuk
Jeruk = Alert, Siap
Jeruk berdenyut = Alert, Menjalankan
Hijau = Siap
Gambar 2.7. Status Cahaya EV3 Brick
Kita juga dapat memprogram status cahaya brick untuk menunjukkan warna yang berbeda dan pulsa ketika kondisi yang berbeda terpenuhi.
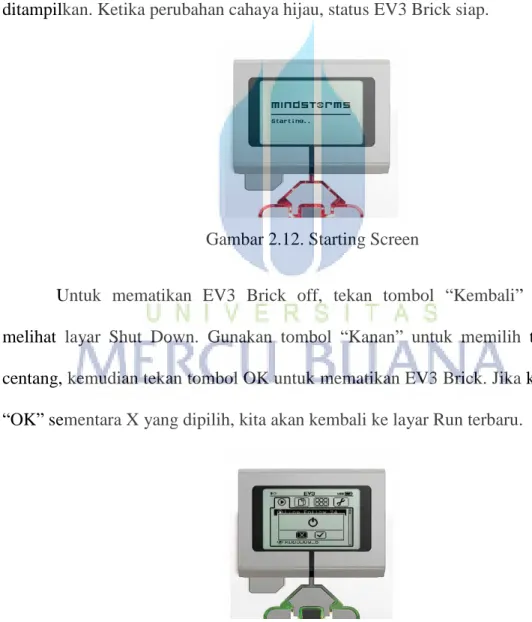
Untuk bagian-bagian yang terdapat pada sisi EV3 Brick bisa kita lihat pada tampilan sebagai berikut:
Gambar 2.8. Brick bagian Atas
Pada bagian port PC terdapat Mini-USB yang terletak di sebelah port D, digunakan untuk menghubungkan EV3 Brick ke komputer. Port A, B, C, dan D sebagai port output yang digunakan untuk menghubungkan motor ke EV3 Brick.
Gambar 2.9. EV3 Brick bagian Bawah
Untuk bagian bawah EV3 Brick terdapat port 1, 2, 3, dan 4 sebagai port input yang digunakan untuk menghubungkan sensor dengan EV3 Brick.
Gambar 2.10. EV3 Brick bagian Kanan
Pada bagian sebelah kanan EV3 Brick terdapat Speaker yang berfungsi sebagai output suara yang digunakan dalam pemograman robot.
Pada bagian port USB Host dapat digunakan untuk menambahkan USB Wi-Fi dongle untuk menghubungkan ke jaringan nirkabel, atau untuk menghubungkan dua hingga empat EV3Bricks secara bersamaan. Port SD Card untuk meningkatkan memori yang sudah tersedia pada EV3 Brick dengan SD Card (maksimum 32 GB).
Untuk mengaktifkan EV3 Brick tekan tombol tengah, setelah kita menekan ―Tombol‖ status Lampu Brick akan berubah menjadi merah dan layar mulai akan ditampilkan. Ketika perubahan cahaya hijau, status EV3 Brick siap.
Gambar 2.12. Starting Screen
Untuk mematikan EV3 Brick off, tekan tombol ―Kembali‖ sampai kita melihat layar Shut Down. Gunakan tombol ―Kanan‖ untuk memilih terima tanda centang, kemudian tekan tombol OK untuk mematikan EV3 Brick. Jika kita menekan ―OK‖ sementara X yang dipilih, kita akan kembali ke layar Run terbaru.
Brick dapat kita ibaratkan seperti CPU pada komputer, yang berfungsi untuk mengolah data. Brick berfungsi untuk mengendalikan jalannya robot sesuai dengan program yang kita buat. Pada pembuatan program dengan EV3 kita dapat melakukannya dengan 2 cara :
Membuat program secara langsung pada EV3 Brick.
Membuat program melalui komputer, selanjutnya kita upload ke EV3 Brick.
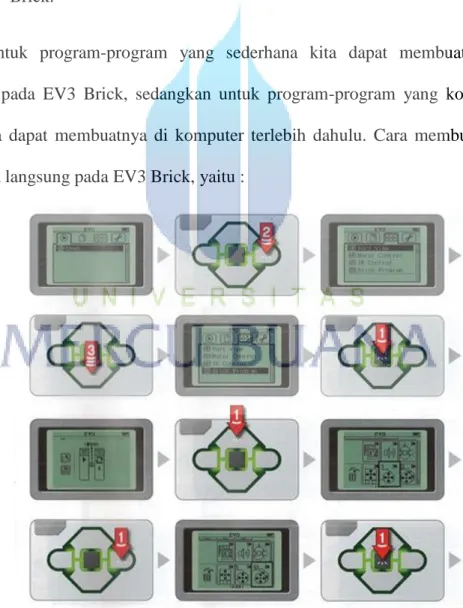
Untuk program-program yang sederhana kita dapat membuatnya secara langsung pada EV3 Brick, sedangkan untuk program-program yang kompleks dan rumit kita dapat membuatnya di komputer terlebih dahulu. Cara membuat program sederhana langsung pada EV3 Brick, yaitu :
2.4.2 Motor
Motor pada Lego Mindstrom EV3 mencakup dua jenis motor, Motor Large dan Motor Medium, yang berfungsi untuk menggerakkan bagian robot, seperti memutar roda atau menjadi sendi. Satu brick bisa dipasang hingga 4 (empat) buah motor. Motor pada EV3 Mindstorm tidak menggunakan motor DC biasa. Motor DC memiliki keterbatasan dalam hal kemampuan torsi putar, karena motor DC tidak mempunyai umpan balik umpan balik untuk mengadaptasi beban pada motor DC.
Pada robot Lego Mindstorm EV3, motor yang dipakai adalah motor DC servo yang dilengkapi dengan sebuah encoder yang berfungsi sebagai umpan balik, sehingga pusat pengendalian dapat memberikan arus yang sesuai dengan beban pada motor. Kecepatan sudut maksimum motor adalah satu putaran per detik. Servo juga dapat digunakan untuk menghitung derajat perputaran atau rotasi. Akurasi dari servo motor mencapai kurang lebih satu derajat. Torsi yang besar yang didapat dalam waktu singkat merupakan kelebihan motor servo. Kekurangan motor servo adalah kurangnya akurasi sehingga diperlukan suatu pengendali yang dapat meningkatkan keakurasian. Gambar berikut ini menunjukkan Motor Large dan Motor Medium lego mindstorm EV3:
Motor Large merupakan motor kuat dan "cerdas" yang memiliki built-in Rotasi Sensor dengan resolusi 1 derajat untuk kontrol yang tepat. Motor Large dioptimalkan untuk menjadi basis mengemudi pada robot. Dengan menggunakan Move Steering atau pindahkan blok pemrograman Tank di Software EV3-G, Motors besar akan mengkoordinasikan tindakan secara bersamaan.
Gambar 2.16. Motor Medium
Motor Medium juga termasuk built-in Rotasi Sensor dengan resolusi 1 derajat, tetapi lebih kecil dan lebih ringan dari motor besar. Itu berarti ia mampu merespon lebih cepat dari pada motor besar. Motor Medium dapat diprogram untuk mengaktifkan atau menonaktifkan, mengendalikan tingkat daya, atau untuk menjalankan untuk jumlah waktu tertentu atau rotasi.
Dari keterangan dua motor diatas dapat kita bandingkan yakni:
Motor Large berjalan pada 160-170 rpm, dengan torsi berjalan dari 20 Ncm dan torsi 40 Ncm (lambat, tapi kuat).
Motor Medium berjalan pada 240-250 rpm, dengan torsi berjalan dari 8 Ncm dan torsi 12 Ncm (lebih cepat, tapi kurang kuat).
2.4.3 Sensor Touch
Sensor Touch adalah sensor analog yang dapat mendeteksi ketika tombol merah sensor telah ditekan dan ketika dilepaskan. Itu berarti Touch Sensor dapat diprogram untuk tindakan menggunakan tiga kondisi ditekan, dirilis, atau bertemu (keduanya ditekan dan dilepaskan).
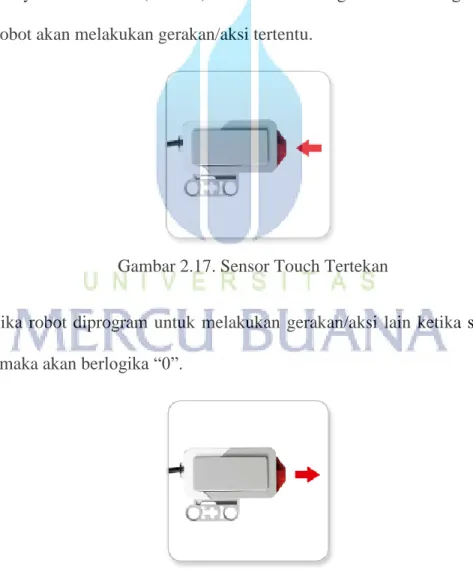
Robot dapat diprogram seperti indera peraba manusia, sensor touch bekerja ketika menyentuh sesuatu (ditekan) maka akan mengindikasikan logika ―1‖ yang artinya robot akan melakukan gerakan/aksi tertentu.
Gambar 2.17. Sensor Touch Tertekan
Jika robot diprogram untuk melakukan gerakan/aksi lain ketika sensor touch dilepas, maka akan berlogika ―0‖.
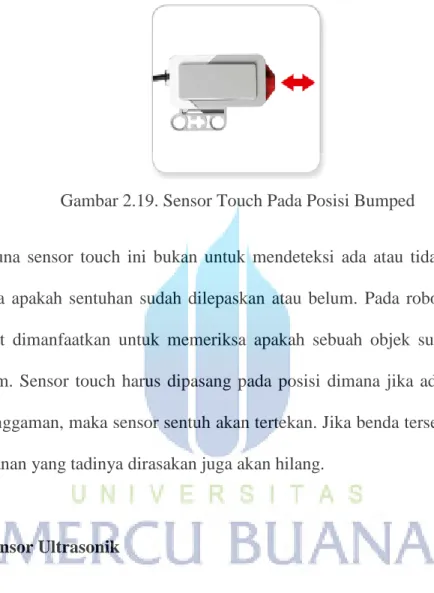
Robot yang di program dengan menggunakan sensor touch saat posisi bumped maka robot akan mengindikasikan logika ―0‖ dan ‖1‖.
Gambar 2.19. Sensor Touch Pada Posisi Bumped
Guna sensor touch ini bukan untuk mendeteksi ada atau tidaknya sentuhan, tetapi juga apakah sentuhan sudah dilepaskan atau belum. Pada robot, sensor touch juga dapat dimanfaatkan untuk memeriksa apakah sebuah objek sudah digenggam atau belum. Sensor touch harus dipasang pada posisi dimana jika ada sebuah objek dalam genggaman, maka sensor sentuh akan tertekan. Jika benda tersebut dilepaskan, maka tekanan yang tadinya dirasakan juga akan hilang.
2.4.4 Sensor Ultrasonik
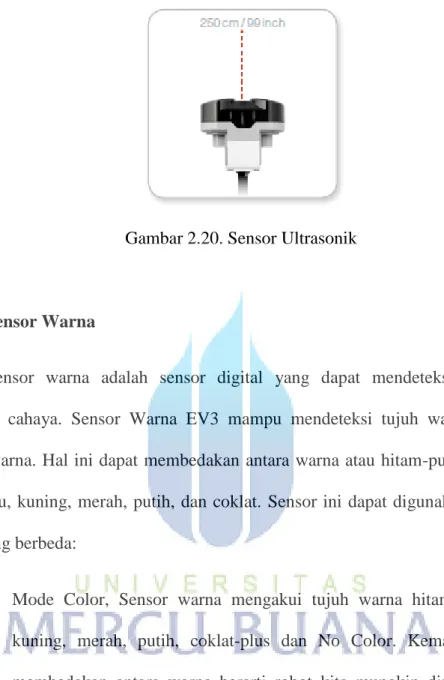
Sensor Ultrasonik adalah adalah sensor digital yang dapat mengukur jarak ke obyek di depannya. Hal ini dilakukan dengan mengirimkan gelombang suara frekuensi tinggi dan mengukur berapa lama waktu yang dibutuhkan suara untuk merefleksikan kembali ke sensor. Frekuensi suara terlalu tinggi bagi kita untuk mendengar.
Jarak ke obyek dapat diukur baik dalam inci atau sentimeter. Hal ini memungkinkan kita untuk memprogram robot untuk menghentikan jarak tertentu dari dinding. Bila menggunakan unit centimeter, jarak terdeteksi adalah antara 3 dan 250 cm ( dengan akurasi + / - 1 cm ) .
Bila menggunakan unit inci, jarak terukur adalah antara 1 dan 99 inci (dengan akurasi + / - 0,394 inci). Nilai dari 255 cm atau 100 inci berarti sensor tidak dapat mendeteksi objek apapun dalam depannya.
Lampu stabil di sekitar mata sensor memberitahu kita bahwa sensor dalam Mode Ukur. Lampu yang berkedip memberitahu kita bahwa itu adalah di Hadirat Mode. Dalam Kehadiran Mode, sensor ini dapat mendeteksi Ultrasonic Sensor lain yang beroperasi di dekatnya. Ketika mendengarkan kehadiran, sensor mendeteksi sinyal suara namun tidak mengirim tersebut.
Ultrasonic Sensor dapat membantu kita menghindari robot furniture, melacak target bergerak, mendeteksi target atau "ping" dengan peningkatan volume atau frekuensi sebagai objek semakin dekat ke sensor.
Gambar 2.20. Sensor Ultrasonik
2.4.5 Sensor Warna
Sensor warna adalah sensor digital yang dapat mendeteksi warna atau intensitas cahaya. Sensor Warna EV3 mampu mendeteksi tujuh warna dan tidak adanya warna. Hal ini dapat membedakan antara warna atau hitam-putih atau antara biru, hijau, kuning, merah, putih, dan coklat. Sensor ini dapat digunakan dalam tiga mode yang berbeda:
1. Mode Color, Sensor warna mengakui tujuh warna hitam, biru, hijau, kuning, merah, putih, coklat-plus dan No Color. Kemampuan untuk membedakan antara warna berarti robot kita mungkin diprogram untuk mengurutkan bola berwarna atau blok, berbicara nama-nama warna seperti yang terdeteksi, atau menghentikan tindakan ketika melihat warna merah.
Gambar 2.21. Mode Color
2. Mode Intensitas Cahaya yang dipantulkan, Sensor Color mengukur intensitas cahaya yang dipantulkan kembali dari lampu-memancarkan cahaya merah. Sensor menggunakan skala 0 (sangat gelap) hingga 100 (sangat ringan). Ini berarti robot kita mungkin diprogram untuk bergerak pada permukaan putih sampai garis hitam terdeteksi, atau untuk menafsirkan kartu identitas kode warna.
Gambar 2.22. Mode Reflected Light Intensity
3. Mode Intensitas Cahaya yang ada disekitarnya, Sensor Color mengukur kekuatan cahaya yang masuk dari jendela lingkungannya, seperti sinar matahari atau sinar senter. Sensor menggunakan skala 0 (sangat gelap) hingga 100 (sangat ringan). Ini berarti robot Anda mungkin diprogram
untuk menonaktifkan alarm ketika matahari terbit di pagi hari, atau menghentikan tindakan jika lampu mati.
Gambar 2.23. Mode Ambient Light Intensity
Tingkat sampel Sensor Color adalah 1 kHz / detik, untuk akurasi terbaik, ketika di Color Mode atau Modus Tercermin Intensitas Cahaya, sensor harus dipegang di sudut kanan, dekat dengan-tetapi tidak menyentuh permukaan.
2.4.6 Sensor Gyro
Sensor Gyro adalah sensor digital yang mendeteksi gerak rotasi pada satu sumbu. Jika sensor Gyro diputar searah jarum jam, maka sensor dapat mendeteksi laju rotasi dalam derajat per detik (Sensor dapat mengukur tingkat maksimum putaran 440 derajat per detik). Selain itu, sensor Gyro dapat melacak keseluruhan sudut rotasi dalam derajat dengan akurasi + / - 3 derajat untuk 90-derajat.
Gambar 2.24. Single Axis Rotation
Cara Menghubungkan Gyro Sensor:
Pada EV3 Brick, pergi ke layar Brick App (tab ketiga) dan menggunakan tombol Tengah untuk memilih Port View. Menggunakan datar hitam Connector Cable, menghubungkan Gyro Sensor ke EV3 Brick on Port 2. Pastikan untuk memegang sensor diam saat kita melakukan hal ini.
Gambar 2.25. Brick App Screen
Pada layar EV3 Brick, Port View app harus menunjukkan "0" membaca di bawah jendela kecil kedua dari kiri, yang merupakan jendela mewakili nilai-nilai masukan dari Port 2. Masih tanpa bergerak sensor, mengamati layar selama beberapa detik. Ini harus terus menampilkan "0" Port 2 dengan Gyro Sensor.
Dalam hal pembacaan Gyro Sensor tidak terus-menerus menampilkan "0" selama proses koneksi, cabut sensor dan ulangi prosedur.
Gambar 2.26. Port View with Gyro Sensor
Ketika layar secara konsisten menampilkan "0" selama beberapa detik, percobaan dengan memutar sensor dan mengamati bagaimana sudut membaca perubahan. Ingat, Gyro Sensor mengukur sudut perubahan hanya pada satu sumbu.
2.4.7 Sensor Infrared dan Remote Infrared Beacon
Sensor inframerah adalah sensor digital yang dapat mendeteksi cahaya inframerah yang tercermin dari benda padat. Hal ini juga dapat mendeteksi sinyal cahaya inframerah yang dikirim dari Remote Infrared Beacon.
Sensor ini dapat digunakan dalam tiga mode yang berbeda: mode Proximity, mode Beacon, dan mode Remote. Dalam mode Proximity, sensor infrared menggunakan gelombang cahaya yang dipantulkan kembali dari objek untuk memperkirakan jarak antara sensor dan objek. Ini laporan jarak menggunakan nilai antara 0 (sangat dekat) dengan 100 (jauh), bukan sebagai jumlah tertentu centimeter atau inci. Sensor dapat mendeteksi obyek sampai 70 cm, tergantung pada ukuran dan bentuk objek.
Gambar 2.28. Mode Proximity
Pada mode Beacon, salah satu dari Remote Infrared Beacon empat saluran dari Channel Selector merah. Sensor Infrared akan mendeteksi sinyal yang cocok dengan channel yang di tetapkan dalam program sampai dengan jarak sekitar 200 cm ke arah depan. Setelah terdeteksi, sensor bisa memperkirakan arah dan jarak (proximity) ke beacon. Dengan informasi ini, terdapat nilai antara -25 dan 25, dengan 0 menunjukkan bahwa sinyal tersebut secara langsung di depan sensor infrared dengan kedekatan nilai antara 0 dan 100.
Gambar 2.29. Mode Beacon
Remote Infrared Beacon adalah perangkat terpisah yang dapat digenggam atau dibangun ke dalam model LEGO. Hal ini membutuhkan dua baterai alkaline AAA. Untuk mengaktifkan Remote Infrared Beacon on, tekan tombol mode Beacon di bagian atas perangkat. A Indikator LED hijau akan menyala, menunjukkan perangkat aktif dan transmisi terus menerus. Tekan lagi tombol mode Beacon akan mematikannya (setelah satu jam tidak aktif, sinyal secara otomatis akan mati).
Mode remote, Remote Infrared Beacon sebagai remote control untuk robot. Ketika di remote Mode, sensor Infrared dapat mendeteksi tombol (tombol kombinasi) pada sinyal ditekan. Ada sebelas tombol kombinasi pada Remote Infrared Beacon:
0 = Tidak ada tombol (Mode off)
1 = Tombol 1
2 = Tombol 2
4 = Tombol 4
5 = Baik Tombol 1 dan Tombol 3
6 = Kedua Tombol 1 dan Tombol 4
7 = Button 2 dan Button 3
8 = Button 2 dan Button 4
9 = Beacon Mode on
10 = Kedua Tombol 1 dan Tombol 2
11 = Button 3 dan 4 Tombol
Gambar 2.30. Remote Infrared Beacon
2.4.8 Sensor Temperature
Sensor Temperature adalah sensor digital yang mengukur suhu pada ujung probe logam. Sensor mengukur dalam Celcius (-20 ° C sampai 120 ° C) dan Fahrenheit (-4 ° F hingga 248 ° F) dengan akurasi 0,1 ° C.
Sensor Temperature ini paling sering digunakan untuk mengumpulkan data untuk proyek-proyek data logging yang berhubungan dengan panas. Dengan Kabel Konektor panjang cm-50 dan probe logam 6,4 cm, sensor membuatnya mudah untuk mengukur cairan panas jauh dari EV3 Brick dan elektronik lainnya.
Gambar 2.31. Sensor Temperature
2.4.9 Konektor
Sensor dihubungkan ke EV3 brick menggunakan suatu 6-position modular connector yang mengutamakan kedua antarmuka digital dan analog. Antarmuka yang analog adalah backward-compatible (dengan menggunakan suatu adapter) dengan Robotics Invention System yang lama. Antarmuka yang digital mampu untuk kedua komunikasi I2C dan RS-485.
Tabel 2.1. EV3 sensor interface pin-out.
2.4.10 Komponen Tambahan
Selain komponen utama, ada juga komponen tambahan untuk membuat robot lego mindstorms EV3. Komponen-komponen yang terdapat di robot lego mindstorms EV3 secara lengkap, yaitu :
2.5 Program EV3-G
Untuk menjalankan robot EV3, pertama-tama kita harus memprogram robot tersebut dengan program yang kita inginkan. Ada banyak bahasa pemrograman yang dapat digunakan untuk memprogram EV3, salah satunya adalah EV3-G.
EV3-G atau LEGO MINDSTORMS Education EV3 adalah software untuk memprogram EV3 Brick dari komputer yang dapat dilakukan secara grafikal. Perangkat lunak ini adalah cukup untuk pemrograman dasar, seperti driving motor, membuat sensor sebagai masukan/input, membuat kalkulasi/perhitungan, dan mempelajari struktur program sederhana dan aliran kontrol.
MINDSTORMS EV3 digunakan untuk menciptakan perangkat lunak yang mengendalikan tindakan dari perangkat keras robot. Software EV3 MINDSTORMS adalah suatu sistem instruksi assembling visual/icon. Aliran arah yang pada umumnya bergerak dari kiri ke kanan.
Dalam program EV3-G, layar ditampilkan di waktu startup disebut Lobby. Isi Lobby adalah menu untuk mengakses setiap fungsi dari program EV3-G, pada tampilan lobby terdapat pilihan berikut:
1. Lobby Tab - Tombol ini selalu mengembalikan ke tampilan Lobby. 2. Activity Overview - Di sini dapat mengakses, mengatur, dan konten
pratinjau dan memulai dengan sebuah project.
Quick Start terdapat video pengenalan dan Panduan Pengguna EV3.
File management untuk memulai sebuah proyek baru atau membuka yang sudah ada.
Educator Robot terdapat 48 tutorial langkah demi langkah yang menjelaskan bagaimana menggunakan Software dan Hardware EV3.
3. View - Tombol ini akan membawa kembali ke Umum Kegiatan.
4. Search - untuk mencari proyek dengan konten tertentu menggunakan opsi filter yang berbeda.
5. www.LEGOeducation.com / MINDSTORMS - link ke situs resmi LEGO Mindstorms.
Ketika membuka program baru atau percobaan, maka secara otomatis akan membuat file folder project. Semua program, eksperimen, gambar, suara, video, instruksi, dan aset lainnya yang digunakan dalam suatu project akan secara otomatis disimpan dalam folder project ini.
Gambar 2.34. Tampilan Tabs Project, Program and Experiment
Properti Project yang ditampilkan meliputi:
1. Project Description – Untuk memberikan judul dan menggambarkannya, lalu masukkan setiap gambar dan video yang kita ingin muncul di Lobby ketika project akan dilihat terlebih dulu.
2. Project Content Overview – Disini kita akan menemukan semua aset termasuk dalam projetc: misalnya, program, eksperimen, gambar, suara, dan Blok kita. 3. Daisy Chain Mode – Pada Daisy Chain Mode memungkinkan kita untuk
memprogram hingga empat Bricks EV3 yang terhubung sekalipun dengan cara mencentang kotak Daisy Chain Mode.
Gambar 2.35. Halaman Properti Project
EV3-G memiliki format grafis berbasis intuitif yang mana pengguna dari 10 hingga 100 tahun dapat dengan cepat belajar dan berhasil menggunakan. Lingkungan program EV3-G terdiri dari area utama sebagai berikut:
1. Programming Canvas — Tampilan program lay out.
2. Programming Palettes — Terdapat bangunan blok untuk program.
3. Page Hardware — Untuk membangun dan mengelola komunikasi dengan EV3 Brick, melihat posisi motor dan sensor yang terhubung. Page hardware tempat untuk men-download program ke EV3 Brick.
4. Content Editor — Sebuah buku kerja digital yang diintegrasikan ke dalam perangkat lunak. Instruksi atau dokumen project dapat menggunakan teks, gambar, dan video.
Gambar 2.36. Lingkungan pemrograman EV3-G
2.5.1 Programming Blocks and Palettes
Semua blok pemrograman yang digunakan untuk mengendalikan robot berada di ―Programming Palettes‖ pada bagian bawah ―Programming Canvas‖. Blok Pemrograman dibagi ke dalam kategori sesuai dengan jenis dan sifat, sehingga mudah untuk menemukan blok yang dibutuhkan.
Untuk sekilas video pemrograman, bisa dilihat di bagian Quick Start dari Lobby dan juga dapat menemukan informasi lebih lanjut tentang bagaimana program di teks ―help‖ pada EV3-G. Pada ―Programming Palettes‖ terdapat blok program sebagai berikut:
Pada Action Blocks terdapat block program untuk Motor Medium, Motor Large, Move Steering, Move Tank, Display, Sound, Brick Status Light.
Gambar 2.38. Flow Control
Bagian Flow Control berisikan block Start, Wait, Loop, Switch, Loop Interrupt. Block ini biasa digunakan untuk memprogram robot.
Gambar 2.39. Block Sensor
Pada block Sensor terdapat block Brick Buttons, Sensor Color, Sensor Gyro, Sensor Infrared, Motor Rotation, Sensor Temperature, Timer, Sensor Touch, Sensor Ultrasonic, Energy Meter, Sensor Sound NXT.
Gambar 2.40. Data Operations
Dibagian Data Operations berisikan block Variable, Constant, Array Operations, Logic Operations, Math, Round, Compare, Range, Text, Random.
Gambar 2.41. Advanced Blocks
Pada Advanced terdapat block File Access, Data Logging, Messaging, Bluetooth Connection, Keep Awake, Raw Sensor Value, Unregulated Motor, Invert Motor, Stop Program.
Gambar 2.42. My Blocks
My Block berfungsi ketika kita berulang kali menggunakan bagian yang sama dari sebuah program di banyak program, itu merupakan saat yang tepat untuk membuat My Block.
2.5.2 Data Logging
Data Logging untuk mengumpulkan informasi untuk analisis. Sebagai contoh, weatherperson yang mengumpulkan pembacaan suhu sepanjang hari, dan kemudian menganalisanya untuk laporan di berita malam atau zookeeper mungkin mengumpulkan data tentang di mana pengunjung menghabiskan waktu mereka di kebun binatang.
EV3-G tidak hanya merekam data, tetapi dapat membantu kita untuk mengatur dan menganalisanya. Data Logging terdiri dari bidang utama sebagai berikut:
1. Graph Area — Untuk melihat dan menganalisa plot data.
2. Configuration Panel — Disini kita menyiapkan eksperimen, mengelola dataset, dan mendapatkan akses ke Dataset Perhitungan dan Grafik Programming, fungsi data logging khusus.
Gambar 2.43. Experiment Configuration panel
Di sini kita menyiapkan eksperimen dengan memilih durasi sampel, menilai dan memilih sensor apa yang digunakan untuk mengumpulkan data. Untuk setiap sensor, kita juga harus memilih mode sensor, karena sebagian besar sensor dapat memberikan berbagai jenis data.
Gambar 2.44. Dataset Table panel
Selain menampilkan data yang dikumpulkan dalam bidang grafik, dataset akan ditampilkan di Dataset Table. Di sini kita juga dapat mengubah nama dataset, menghapus atau menyembunyikannya, dan mengubah gaya plot dan warna grafik.
Gambar 2.45. Dataset Calculation panel
Di sini kita dapat memanipulasi dataset dan grafik dengan melakukan berbagai perhitungan dengan menggunakan angka, fungsi, dan dataset lainnya. Hasil output akan ditampilkan sebagai grafik baik dan nilai-nilai dataset.
Gambar 2.46. Graph Programming panel
Dengan membagi bidang grafik kita dalam zona yang berbeda, kita dapat mengaktifkan input sensor untuk memicu atau mengaktifkan output: misalnya, motor atau suara dari EV3 Brick ketika nilai-nilai sensor mencapai tingkat atau ambang tertentu.
3. Hardware Page — Untuk membangun dan mengelola komunikasi dengan EV3 Brick, melihat posisi motor dan sensor yang terhubung. Page hardware tempat untuk men-download program ke EV3 Brick. Tombol pada pengendali Hardware Page memiliki fungsi sebagai berikut:
Download and Run – Mendownload program EV3 Brick dan segera menjalankan program.
Download and Run Selected - Mendownload hanya blok yang disorot ke EV3 Brick dan segera menjalankan program.
Upload – Meng-Upload dataset yang dikumpulkan dari EV3 Brick ke Percobaan.
Gambar 2.47. Hardware Page Controllers
Teks EV3 dalam jendela kecil di atas akan berubah menjadi merah ketika EV3 Brick terhubung ke komputer.
4. Content Editor — Sebuah buku kerja digital yang diintegrasikan ke dalam perangkat lunak. Instruksi atau dokumen project dapat menggunakan teks, gambar, dan video.
5. Data Logging Toolbar — Mencari alat dasar grafik dan bereksperimen. Pelajari lebih lanjut tentang alat ini di Bantuan EV3-G.
Gambar 2.48. Data Logging
Dalam Configuration Panel, kita akan menemukan empat tab yang berbeda yang akan membantu kita mempersiapkan, mengelola, dan menganalisis percobaan kita. Beberapa tab yang dinamis: secara otomatis akan ditampilkan bila relevan dan kita akan selalu dapat beralih di antara tab secara manual.