ISSN :2085-6989
Perancangan Neural Network Control Untuk Menggerakkan Posisi
Laras Meriam Pada Platform Yang Bergerak
(Neural Network Design To Control Cannon Barrel Position On The
Movement Platform)
Oleh Wiwik Wiharti
Jurusan Teknik Elektro Politeknik Negeri Padang
ABSTRACT
The balance of cannon barrel position on the war ship need to be done to make it stays stable. Its unbalance position that caused by pitch and roll disturbance will influence the target accuracy. By this disturbance, the balancing control on the movement platform can be done by using Neural Network Control method which their training and elevation angles movements can be controlled.
In this research, the cannon movement system is modeled in training and elevation movements and their disturbances are modeled by having pitch and roll. The system is simulated to get error in the output of controller which is processed by using the neural network coordination system control. The learning process in the neural network is made using back propagation method in order to get the weight value in the different disturbances which their results are given to the simulation of coordination model. The coordination system results of this research show that the training angle velocity is 57.21o/s and the
elevation angle velocity is 31o/s with the scale factor for angle velocity is 0.593.
Keywords: Training, elevation and neural network
PENDAHULUAN
Teknologi persenjataan yang
berkembang diharapkan dapat
mendukung perkembangan persenjataan meriam sebagai senjata utama pada kapal militer. Posisi meriam kapal perang cenderung tidak stabil disebabkan karena pengaruh gelombang laut yang membuat posisi kapal bergerak ke atas dan ke bawah (pitch dan roll).
Untuk memodifikasi sistem kendali meriam dan meminimalkan gangguan pitch dan roll, diterapkan
pemodelan neural network (NN)
menggunakan metode NNC (Neural
Network Control). Dengan perancangan
dan pembuatan pada plant berupa miniatur meriam yang melakukan gerakan training dan elevasi dan membentuk sudut sesuai set point, gangguan pada platform bergerak dapat diperkecil sehingga meriam lebih stabil dan lebih akurat (Bekir Karlik, Serkan Aydin, 1999).
Prinsip Kerja Meriam
Meriam terdiri dari dua bagian yaitu rangka utama (main frame) dan badan meriam (body gun). Main frame biasa disebut lengan (arm) terdiri dari
rangkaian hubungan mekanis
(mechanical links) yang dihubungkan oleh joint dengan links yang lain dimana
joint berfungsi sebagai kontrol dan link
sebagai penghubung.
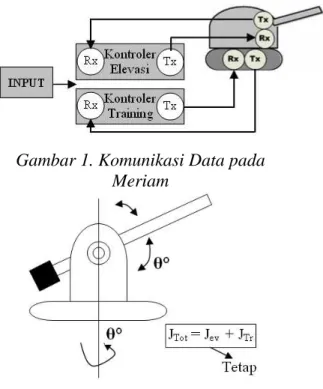
Meriam yang dilengkapi
kontroler bekerja berdasarkan prinsip komunikasi data antara pengaturan arah laras (elevasi) dan arah badan meriam (training) seperti pada Gambar 1. Setiap bagian memiliki motor synchro Tx (pengirim) dan synchro Rx (penerima) sebagai perangkat komunikasi data saat meriam bergerak. Input data untuk mengarahkan meriam pada posisi sudut training dan elevasi meriam yang diolah kontroler dan dikirim melalui synchro
Tx untuk elevasi dan synchro Tx untuk
training.
Jika terdapat error pada posisi sudut training/ elevasi maka setiap
synchro Tx pada blok meriam mengirim
data error pada elevasi/ training ke setiap
synchro Rx untuk elevasi/ training
kontroler sebagai feedback. Data diolah kontroler dan dikirim melalui synchro
Tx untuk elevasi dan training hingga
meriam berhenti sesuai posisi sudut yang diharapkan dan tidak ada error (andribayu,2006).
Gerakan Training dan Elevasi Meriam
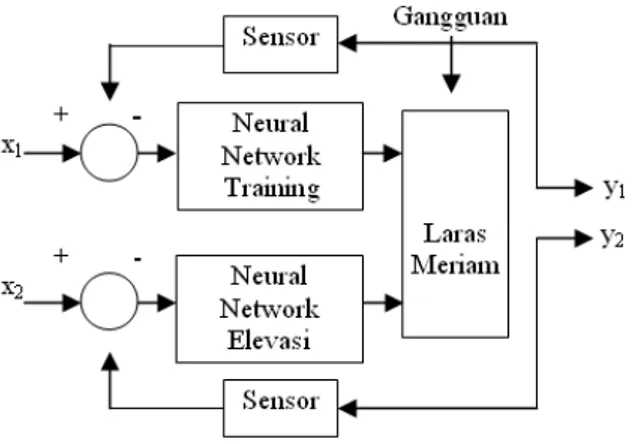
Gerakan training merupakan
gerakan vertikal dan elevasi ialah gerakan horizontal yang berputar kanan dan kiri terhadap badan meriam seperti Gambar 2 dimana J adalah momen inersia dan θ adalah sudut elevasi.
Gambar 1. Komunikasi Data pada Meriam
Gambar 2. Gerakan Training dan Elevasi Meriam
Identifikasi Plant
dengan gerakan training dan elevasi. Untuk perancangan kontroler dan respon yang diinginkan, plant perlu diidentifikasi untuk mendapatkan fungsi alih matematis gerakan training dan elevasi.
Penentuan model struktur plant berupa pengaturan posisi laras meriam, maka dibuat gerakan training dan elevasi sistem orde dua yang menentukan jenis respon kontroler yang dipakai untuk menghasilkan parameter kontroler yang diinginkan. Digunakan model pendekatan ARMA (Auto Regressive Moving Average) untuk pencapaian persamaan matematis gerakan training dan elevasi. Dengan time sampling 0,1 detik didapatkan fungsi alih berikut:
0189 . 0 s 26 . 10 2 s 986 . 2 s 1744 . 0 ) s ( G training + + + − = (1)
Nilai parameter norm error = 5,7121
86 . 2 s 54 . 20 s 39 . 7 s 4891 . 0 ) s ( G elevasi 2 + + + − = (2)
Nilai parameter norm error = 4,1233 Perancangan Kontroler
Spesifikasi kontroler perlu untuk acuan perancangan. Karakteristik respon merupakan spesifikasi kinerja dari respon keluaran sistem pada masukan. Spesifikasi kontrol digunakan untuk melihat kualitas sistem Dedid H,2004).
Pada tahap perancangan
kontroler ini terdiri dari 2 macam kontroler. Pertama kontroler neural
network tanpa koordinasi untuk pergerakan sudut elevasi dan training. Kedua kontroler koordinasi neural
network pergerakan sudut elevasi dan
training.Blok diagram meriam dengan kontroler NN ditunjukkan pada Gambar 3.
Gambar 3. Diagram blok meriam dengan kontroler neural network
Desain struktur kontroler NN
ditentukan oleh orde plant sistem. Gerakan training/elevasi menggunakan sistem orde dua, maka desain struktur kontroler NN adalah ARMA orde dua. Desain struktur kontroler ditunjukkan pada Gambar 4.
Gambar 4. Desain struktur kontroler gerakan training dan elevasi
Struktur kontroler NN yang ditunjukan pada Gambar 4 terdiri dari :
1. Tiga lapisan masukan (x1, x2, x3)
2. Tiga lapisan tersembunyi (z1, z2, z3)
3. Satu lapisan keluaran gerakan training dan elevasi (y1 dan y2)
4. Dua belas pembobot (v01, v11, ...dan
v33) yang menghubungkan unit
masukan dan unit lapisan tersembunyi.
5. Tiga pembobot (w1, w2 w3) yang
menghubungkan lapisan tersembunyi dengan lapisan keluaran.
Digunakan proses pembelajaran
supervised learning dengan algoritma
backpropagation berupa proses feed
forward dan modifikasi weight. Dan dibuat
algoritma pembelajaran awal kontroler NN dengan input sinyal sinus. Ini dilakukan sebelum kontroler dipakai pada sistem sebenarnya dengan melihat respon kerja. Pembelajaran awal dapat ditunjukkan pada Gambar 5.
Gambar 5: Diagram blok sistem pembelajaran awal kontroler gerakan
training dan elevasi
Kinematika Meriam untuk Sistem Koordinasi
Perencanaan sistem kinematika meriam adalah melalui rotasi pada sumbu x, y dan z menggunakan matrik rotasi dalam konsep rotasi euler dengan menentukan koordinasi gerakan training dan elevasi laras meriam yang bergerak setiap saat. Untuk mengkombinasikan rotasi menggunakan matriks dibutuhkan metode konvensi. Arah koordinat direpresentasikan menggunakan sistem koordinat tangan kanan dan arah rotasi menggunakan aturan tangan kanan. Ibu jari dan arah sumbu jari lainnya menunjukkan arah rotasi, bila ke atas maka arah rotasinya positif dan sebaliknya.
Rotasi terhadap sumbu X (Pitch) − = cos sin 0 sin cos 0 0 0 1 1 1 1 Z Y X . 0 0 0 Z Y X (3) X1 = X0 Y1 = Y0 cos - Z0 sin Z1 = Y0 sin + Z0 cos
Rotasi terhadap sumbu Y (Roll)
− = cos 0 sin 0 1 0 sin 0 cos Z Y X 1 1 1 . 0 0 0 Z Y X (4) X1 = X0 cos + Z0 sin Y1 = Y0 Z1 = -X0 sin + Z0 cos Rotasi terhadap sumbu Z (Yaw)
− = 1 0 0 0 cos sin 0 sin cos 1 1 1 Z Y X . 0 0 0 Z Y X (5) X1 = X0 cos - Y0 sin Y1 = X0 sin + Y0 cos Z1 = Z0 HASIL
Pengujian Pembelajaran Awal
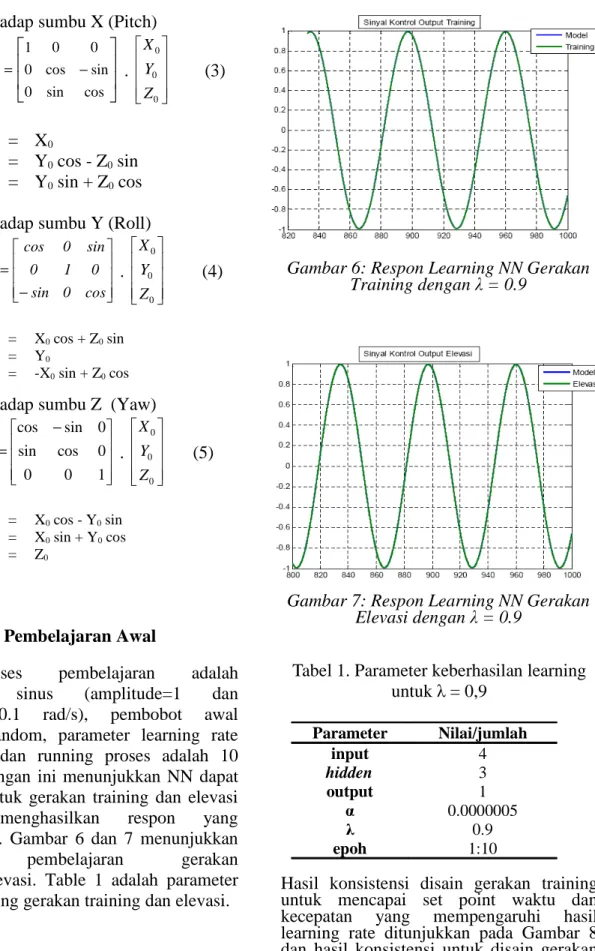
Proses pembelajaran adalah masukan sinus (amplitude=1 dan frekuensi=0.1 rad/s), pembobot awal bernilai random, parameter learning rate 0.000005 dan running proses adalah 10 epoch. Dengan ini menunjukkan NN dapat dipakai untuk gerakan training dan elevasi sampai menghasilkan respon yang diinginkan. Gambar 6 dan 7 menunjukkan
respon pembelajaran gerakan
training/elevasi. Table 1 adalah parameter hasil learning gerakan training dan elevasi.
Gambar 6: Respon Learning NN Gerakan Training dengan λ = 0.9
Gambar 7: Respon Learning NN Gerakan Elevasi dengan λ = 0.9
Tabel 1. Parameter keberhasilan learning untuk λ = 0,9 Parameter Nilai/jumlah input 4 hidden 3 output 1 α 0.0000005 λ 0.9 epoh 1:10
Hasil konsistensi disain gerakan training untuk mencapai set point waktu dan kecepatan yang mempengaruhi hasil learning rate ditunjukkan pada Gambar 8 dan hasil konsistensi untuk disain gerakan elevasi ditunjukkan pada Gambar 9.
0 1 2 3 4 5 6 7 8 9 10 -100 -80 -60 -40 -20 0 20 40 60 80 100 Waktu S u d u t (d e g ) Training 75 Training -75 Training 85 Training -85 Training 50 Training -50
Gambar 8. Hasil Konsistensi Disain Gerakan Training 0 1 2 3 4 5 6 7 8 9 10 -50 -40 -30 -20 -10 0 10 20 30 40 50 Waktu S u d u t (d e g ) Elevasi 45 Elevasi -45 Elevasi 30 Elevasi -30
Gambar 9. Hasil Konsistensi Disain Gerakan Elevasi 340 360 380 400 420 440 460 480 500 -1.5 -1 -0.5 0 0.5 1 1.5 Plant Training Sinyal Kontrol Output Training
Gambar 10. Respon Learning NN Training
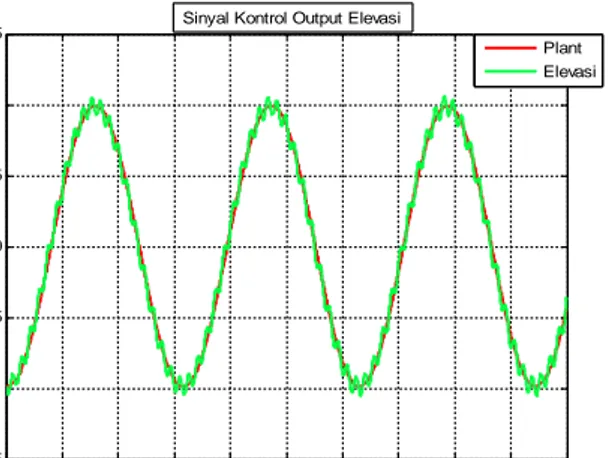
300 320 340 360 380 400 420 440 460 480 500 -1.5 -1 -0.5 0 0.5 1 1.5 Plant Elevasi Sinyal Kontrol Output Elevasi
Gambar 11. Respon Learning NN Elevasi
Gambar 10 merupakan hasil respon gerakan training dengan gangguan roll=200
, amplitude=0.08 dan frekuensi = 2 rad/s dengan gelombang sinus. Dan Gambar 11 hasil respon gerakan elevasi dengan gangguan pitch = 50
, amplitude = 1 dan frekuensi = 2 rad/s dengan gelombang sinus.
PEMBAHASAN
Gerakan Training dan Elevasi untuk Sistem Koordinasi
Didapatkan respon koordinasi pada sistem koordinasi tanpa pitch dan roll menggunakan training 97deg/sec dan elevasi 31deg/sec dan sistem diberi gangguan pitch dan roll. Sebuah kasus pada Gambar 12 tinggi meriam=40cm, sasaran=20cm dan platform dirotasi dengan pitch=50 dan roll=200 dimana koordinat kartesian P0(x0,y0,z0)=P0(0,20,40) ialah
posisi awal.
Gambar 12. Perancangan Meriam terhadap Sasaran
Gambar 13. menunjukkan adanya pergeseran dari P0(x0,y0,z0) ke P1(x1,y1,z1)
diakibatkan oleh gangguan roll θ pada plant. Dengan persamaan (4) jika diketahui koordinat P0= (0,20,40) dan θ=20o didapat
koordinat P1 : = = − = = 59 . 37 20 67 . 13 20 40 20 20 40 40 20 0 20 0 20 0 1 0 20 0 20 1 1 1 1 Cos Sin Cos Sin Sin Cos z y x P
sehingga nilai koordinat P1(x1,y1,z1)=P1
(13.67, 20, 37.59).
Gambar 13. Pergeseran Posisi Koordinat Akibat Gangguan Roll
Tabel 4. Hasil Perhitungan pada x, y dan z terhadap gangguan pitch dan roll pada
gerakan training dan elevasi
No Sb x Sb y Sb z No Sb x Sb y Sb z 1 40 0 0 11 36.53 9.79 13.02 2 40 0 0 12 36.17 11.06 13.02 3 39.99 0 0.7 13 35.75 11.62 13.68 4 39.94 0.7 2.09 14 35.09 12.77 14.33 5 39.75 2.78 3.49 15 34.14 13.79 15.63 6 39.41 4.84 4.87 16 33.37 14.16 16.9 7 39.32 5.53 4.87 17 32.3 15.06 18.16 8 38.67 6.82 7.63 18 30.87 15.73 20 9 37.79 8.03 10.35 19 29.99 16.62 20.6 10 37.27 8.6 11.69 20 28.09 19.67 20.6
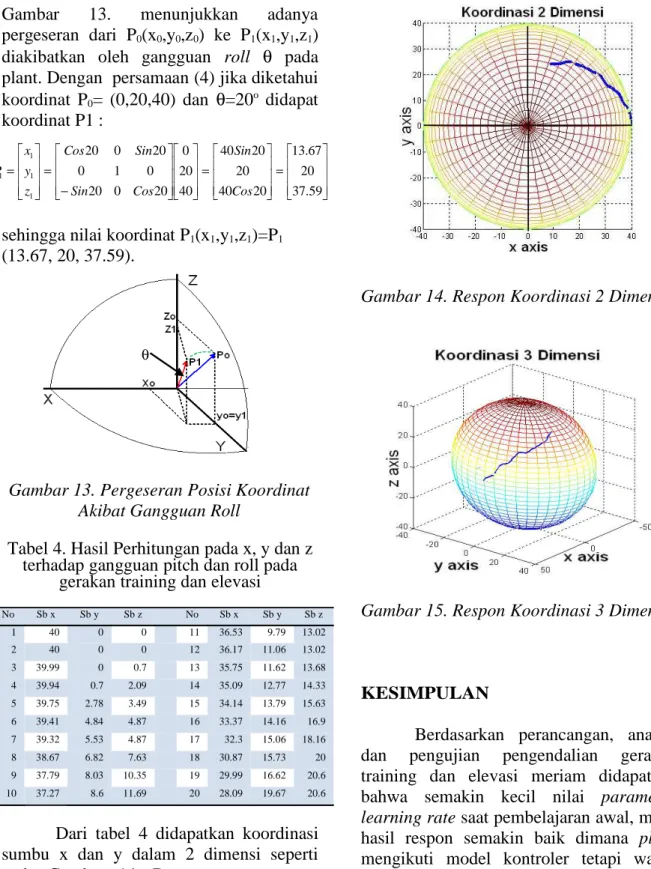
Dari tabel 4 didapatkan koordinasi sumbu x dan y dalam 2 dimensi seperti pada Gambar 14. Dengan memutar y didapatkan bentuk 3 dimensi seperti Gambar 15.
Gambar 14. Respon Koordinasi 2 Dimensi
Gambar 15. Respon Koordinasi 3 Dimensi
KESIMPULAN
Berdasarkan perancangan, analisa dan pengujian pengendalian gerakan training dan elevasi meriam didapatkan bahwa semakin kecil nilai parameter
learning rate saat pembelajaran awal, maka
hasil respon semakin baik dimana plant mengikuti model kontroler tetapi waktu untuk proses pembelajaran awal semakin lama. Untuk mencapai hasil proses pembelajaran yang baik, diberikan nilai
parameter learning rate 0.000005. Sistem
koordinasi dapat mengembalikan posisi gerakan walaupun ada gangguan yang menyebabkan perubahan posisi sudut gerakan training dan elevasi karena pitch
dan roll pada platform yang bergerak. Pada sistem koordinasi didapatkan kecepatan sudut 57.21o
/s untuk gerakan training dan 31o
/s untuk elevasi serta faktor skala kecepatan sudut sebesar 0,593.
DAFTAR PUSTAKA
Bekir Karlik, Serkan Aydin (1999), An
Improved Approach to The Solution of Inverse Kinematics Problems for Robot Manipulators, IEEE Journal
vol 13, page159-164.
G. Cembrano, G. Wells, J. Sarda dan A. Ruggeri (1997), Dynamic Control of
A Robot Arm Using CMAC Neural Networks, Control engineering
practice vol 5 no. 4 page 485-492. Dedid H. (2004). Tesis Sistem
Pengaturan ITS Surabaya
Jorge I. Arciniegas, Adel H. Eltimsahy, Krzysztof J. Cios (1997),
Neural-Networks-Based Adaptive Control of Flexible Robotic Arms, IEEE Journal
on Neurocomputing vol 17, page 141-157.
Laurence Fausett (1994), Fundamentals
of Neural Networks, Prentice Hall,
USA.
Pedro Martın, José del R. Millán (2000),
Robot Arm Reaching Through
Neural Inversions and
Reinforcement earnin, IEEE Journal