By Nicole Abaid, Vladislav Kopman, and Maurizio Porfiri
An Attraction Toward
Engineering Careers
The Story of a Brooklyn Outreach
Program for K–12 Students
T
his article narrates the development, organization, and execution of a robotics-based outreach program designed to ignite K–12 students’ interests in science, technology, engineering, and mathematics (STEM) and attract them toward engineering careers.Engineering disciplines (such as biomedical, chemical, civil, electrical, and mechanical) are instrumental to society’s well being and technological competitiveness; however, the interest of K–12 American students in these and other engineering fields is fading [1], [2]. To broaden the base of engineers for the future, it is critical to excite young minds about STEM (see [3] and [4]). Research that is easily visible to K–12 students, includ-ing underserved and minority populations with limited access to technology, is crucial in igniting their interests in STEM fields. More specifically, research topics that involve interactive elements such as robots may be instrumental for K–12 educa-tion in and outside the classroom [5]–[8].
Interactive robots have been successfully used in STEM edu-cation and outreach activities [6], [9]–[20]. In K–12 eduedu-cation, robots can be employed to teach formal subjects, such as physics
DRAWINGS OF FISH AND ROBOTIC FISH BY STUDENTS. POLYTECHNIC INSTITUTE OF NEW YORK UNIVERSITY
Digital Object Identifier 10.1109/MRA.2012.2184672
and science [6], [10], [11], [15], and to inspire an explicit engi-neering curricula [19], which is largely uncommon in the American preuniversity system. Beyond integrating robotics into school curricula, out-reach activities centered on exciting children and teen-agers about STEM can greatly benefit from the tangibility that robots offer [13], [14], [16], [21], [22]. That is, robotics-based activities administered to students outside of school environments, in the form of workshops and summer camps, are shown to posi-tively influence the partici-pants’ understanding of engineering topics and fur-ther foster their interest in STEM fields. As an exam-ple, robots featured as key-note speakers during outreach and public events can increase interest and information retention of the audience [20]. The impact of robots in education is not limited to K–12 students, as robotics is extensively used in higher education to teach engineering principles and develop design and compete-type curricula [9], [12], [17], [18].
Part of the research activities of the Dynamical Systems Laboratory (DSL) at the Polytechnic Institute of New York University involves the design and implementation of under-water vehicles for marine studies. Potential applications of the research include developing effective strategies for the coordi-nation of low-cost multivehicle teams and studying animal– robot interaction. Under the support of the National Science Foundation (NSF) Faculty Early Career Development (CAREER) award grant, major efforts have been devoted to the guidance and control of gregarious fish using biomimetic robots (see, e.g., [23]–[25]). The overarching goal of these studies is to develop a comprehensive dynamic systems
framework for the analysis and control of animal groups [25]. The robots designed and assembled in the DSL mimic live fish swimming and are easily operated using a remote control, making them a natural teaching tool for use with K–12 students.
In this article, we explain the fun-science activity con-ducted by members of the DSL at the NYAQ in June 2010 within the NSF CAREER project. The format of the activity, which brings together K–12 students and robots, is unique in the authentic engineering experience it offers. The activ-ity takes place at the NYAQ and has the advantage of the stunning collection of fish there to acquaint students with different modes of swimming. As per a real biologically inspired robot design, the students are introduced to robotic fish from the DSL and are encouraged to design and make caudal fins for the robots. The students test these fins on the robots to ascertain the affect that the caudal fin size and shape has on swimming.
The planning and implementation of the fun-science activity is enhanced by augmenting the DSL team with two high school students with prior experience in the NYAQ’s teen docent program. The high school students are able to act as liaisons between the elementary/middle school student participants and the DSL members, while bringing intimate knowledge of the NYAQ to the planning of the activity.
The results of the outreach program are assessed by two surveys, which indicate the success of the activity in influenc-ing the students’ perceptions of engineerinfluenc-ing. By comparinfluenc-ing self-reported survey responses before and after the event, an increased interest in STEM fields is observed in the students, who also recognize engineering to be a more accessible and exciting discipline after participating in the activity. Moreover, locating this activity in Brooklyn, New York, and targeting local public schools for participation allows us to have an impact on underserved populations whose access to engi-neering and science experiences may be limited by socioeco-nomic and cultural barriers.
Interactive Robotic Fish for Outreach
The DSL has been actively engaged in the design, realiza-tion, and implementation of underwater robots since 2007. Past endeavors have brought forth remotely con-trolled biomimetic robotic fish propelled by ionic poly-mer metal composites (IPMCs) and powered by onboard batteries [24]. IPMCs are a novel class of compliant smart materials that deform in response to a voltage signal applied across their electrodes [26]. An IPMC strip in connection with a passive silicone fin at its tip comprises an artificial flapping tail for the robotic fish. This allows the robot to replicate the locomotion of carangiform swimmers such as goldfish or minnows.
The high cost of IPMC actuators limits the use of these vehicles in the classroom. In addition, IPMCs, in the early stages of development, are delicate materials that require care-ful use and storage and are not easily handled by children. Therefore, the DSL sought to develop a low-cost and more
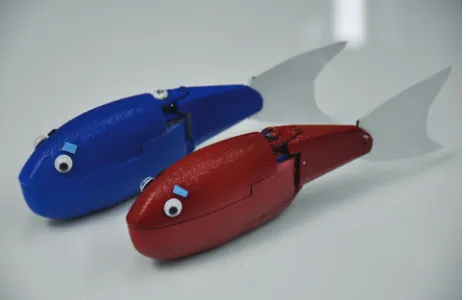
Figure 1. Two servomotor-propelled biomimetic robotic fish used as a K–12 educational platform.
POL
The activity at the NYAQ
included informative and
interactive elements to
ignite K–12 students’
interest in technology and
science and to attract them
toward career opportunities
resilient version of the biomimetic robotic fish. The result, designed and realized by graduate student Vladislav Kopman, is a servomotor-driven, attractive, and child-friendly platform based on off-the-shelf electronics (see Figure 1).
The servomotor-propelled robotic fish are designed to swim at speeds comparable to that of the live fish they are intended to lead, approximately one body length per second, and have an approximate turning radius of one body length. The robots are designed to be easily controlled by young par-ticipants using a remote control interface similar to a video game controller. Each robotic fish is given a unique color for easy identification by the operator. Multiple robots may be operated simultaneously during racetype events, as each one has its own designated remote control. The entire system costs under US$100 on a limited production basis, making the robots affordable for classroom implementation.
Robotic Fish Anatomy
The robotic fish is composed of an acrylonitrile butadiene styrene plastic body shell, tail section, and body cap. The electronics and battery for control and power are encased in the body shell (see Figure 2). The electronics include a microcontroller unit, a wireless transceiver, power regula-tors, and a rechargeable battery. A servomotor, used to actuate the tail section of the robot, is fit into a compart-ment at the back of the body shell. The tail section is con-nected to the servomotor using a standard servo horn and provides a means to attach a customizable caudal fin. The servomotor is waterproof and may operate underwater, provided that the inside of the body shell is watertight for protection of the electronics compartment and conserva-tion of buoyancy. A counterweight, composed of a thin strip of coated lead, sits at the bottom of the body shell to achieve neutral buoyancy and enhance pitch and roll sta-bility. The body cap provides access to the electronics compartment for initial assembly of the robotic fish and is permanently attached to the body shell in the final robot implementation. A switch hidden behind the servomotor horn allows the robot to be turned on and off, and a power port is located at the back of the body shell for charging. This configuration permits the robot to remain in its assembled form and does not require the body cap to be removed during normal operation or charging.
The body shell, tail section, and body cap are designed in SolidWorks and printed on a Dimension Soluble Sup-port Technology rapid prototyping machine. The dimen-sions of the robot are 117 mm in length, 48 mm in height, and 26 mm in width, without the customizable caudal fin attached.
Robotic Fish Interactive Features
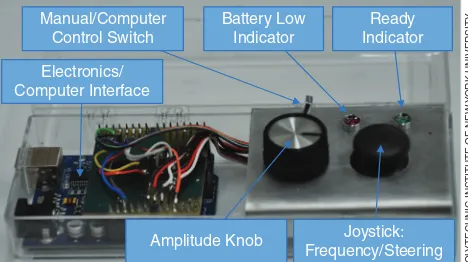
The robotic fish are controlled using a remote control user interface (see Figure 3). The remote control is enclosed in a transparent plastic case with all of its electronics visible to fur-ther enhance the learning experience. The remote control con-tains a variety of inputs and outputs, giving the user the ability
to control the robotic fish locomotion. In particular, the tail beating frequency and amplitude may be modulated in addi-tion to basic steering, forward, and stop commands. A video-game-like joystick provides
steering control with left/ right motions and controls the tail beating frequency with up/down motions. Additionally, a knob allows for the selection of tail beating amplitude. LED lights indicate when the remote is ready (green LED) and when the robot-ic fish batteries are low (red LED). A toggle switch is used to vary the control from the manual control (joystick) to a potential autonomous solution (computer interface).
In their assembled
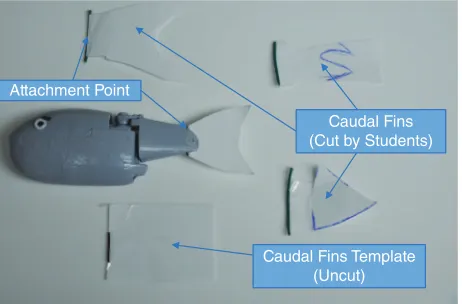
form, the robotic fish do not include a caudal fin. This allows the users, in this case the students participating in the
Figure 2. Completed robotic fish with its body cap open. The picture shows the power and control electronics along with the battery and servomotor.
Figure 3. The remote control interface used to operate robotic fish.
assembled in the DSL
mimic live fish swimming
and are easily operated
using a remote control,
making them a natural
teaching tool for use with
activity, to experience biologically inspired design by cutting out their own caudal fin from a premade template (see Figure 4). The template is constructed by sandwich-ing a piece of paper and a 22-gauge wire between two pieces of clear pack-ing tape. The wire is used to secure the caudal fin template to the tail section of the robot by snugly fit-ting into a keyhole slot.
Educational Material for Outreach
The activity at the NYAQ included informative and interactive elements to develop the students’ interests in technology and science and to attract them toward career opportunities in engineering. The program
consisted of interactive fun-science activities at the NYAQ for elementary and middle school students based on under-water robotics and marine science, and it targeted the engaging intersection of these disciplines in the emerging field of biologically inspired robotics. The activity was orga-nized as a 75-min event, including a tour of the NYAQ, an underwater robotics session, and an interactive engineering phase. Support material for the activity, comprising pam-phlets and a poster, was developed by two high school stu-dents who also served as leading docents in the program.
Activity Informative Material
Two high school students, Andrew Chen and Daniil Kar-pov, were selected for their prior affiliation with the NYAQ through the teen docent program and worked on this activ-ity with the graduate student mentor Nicole Abaid at the DSL for 5 h/week. During this time, they first learned about ongoing research projects in the DSL through the demon-stration of experiments by laboratory members and a con-sultation of posters and papers resulting from this research. In addition, they studied fundamental concepts in smart materials and fish physiology to understand the elements of these fields that are salient for biomimetic robot design and application. Simultaneously, these high school students were cognizant of their role as a bridge between the knowl-edge of elementary and middle school students and the sci-entific community at the laboratory.
Using this information, they created several documents. The first is an informative pamphlet designed for interested teachers. The pamphlet explains basic robotics research questions addressed by the DSL research team, including creating a biomimetic vehicle for implementation with live animals. Also, the pamphlet expresses the motivation behind the DSL research with marine science background information and outlines the proposed funscience activity. The diction of the pamphlet was designed specifically for nontechnical audiences, which is evidenced in the follow-ing quotation outlinfollow-ing fish locomotion:
Fish swim in a variety of ways. Stingrays, for example, flap their fins like wings to glide on the bottom of the ocean floor. Eels, on the other hand, wriggle like snakes to get where they’re going. The fish that we are going to focus on use a form of locomotion called
carangiform. These fish are what we normally picture in our heads when we think of fish. To move in their environment, these fish wave their bodies like a flag. The ability to swim in this manner allows for some members of this class of fish to school (or swim in a group for protection).
The other educational document prepared by the high school students was a large 3 ft # 2 ft poster offering an overview of the research in the DSL (see Figure 5), which also drew from their study on fish physiology. This colorful poster was informally presented by the high school students during the activity and was written using age-appropriate language and concepts. Adhering to this restriction, the
Figure 5. High school students Daniil Karpov and Andrew Chen present a poster highlighting DSL research to student
participants.
high school students accurately described such highlevel ideas as the basic principles behind the IPMCs used in DSL research projects.
Activity Interactive Material
In accompaniment with the robotic fish, the high school students created caudal fin templates from which the par-ticipants were able to construct their own biologically inspired caudal fins (see Figure 4). These fins can easily be inserted into the keyhole slot on each robot’s tail to allow for quick trials of each student’s fin. An ample amount of caudal fin templates was prepared so that each student could have several tries.
The high school students also created a testing pool for the robots, shown in use in Figure 6, comprising a large plastic storage container. The container was equipped to be divided into three lanes by colorful buoys and twine, giving it the effect of a miniature swimming pool. In addi-tion, the high school students created a finish line from a flag hoisted between two wooden dowels at one end of the pool. This allowed the participants an arena in which to test their caudal fins on the robotic fish and compete their fins against one another via the simultaneous operation of two robots in the pool.
Activity Format
The format of the activity at the aquarium has both live and robotic fish experiences. Upon entering the aquari-um, each class is directed to the Glover’s Reef exhibit that mimics a real Belizean environment. The students can observe fish characterized by different types of swimming modalities, including eels, rays, wrasses, and chromises, for approximately 15 min. An aquarium educator guides their observations toward the different types of locomo-tion that animals underwater may use to move in their environment. The class is then asked to think about what characteristics of body or motion are required to make a fish swim quickly.
When the tour adjourns, the students are led to an educa-tion building at the aquarium, where several staeduca-tions are pre-pared along with a robotic fish test platform. The classes are given a few minutes of instruction outlining the stations, which comprise the fin-making station, the testing pool station, the research station, the engineering station, and the survey station.
A typical route for a student through the activity is as follows:
1) The student goes to the fin-making station, where he or she cuts a caudal fin out of a fin template based on what he or she has observed during the tour (see Figure 7).
2) The student walks to the testing pool station and is assisted in mounting this fin on the robot and controlling the swim-ming of the robot using a remote control (see Figure 6). 3) After the experimental trial, the student walks to the
research station where he or she is guided through the poster by one of the high school students, who explains the
significance of robotic fish in the DSL’s research. At this sta-tion, the student also observes videos of the IPMC-actuat-ed robotic fish developIPMC-actuat-ed in the DSL.
4) From this point, the student walks to the engineering station to see and handle
disas-sembled robot parts, including circuit boards, servomotors, IPMCs, and plastic hulls. Here, the student has an explicit opportunity to ask one of the members of the DSL questions he or she might have (see Figure 8).
5) The student goes to the sur vey station and answers the survey pre-pared for this study.
At the end of the visit, the students are thanked for their time, attention, and enthusiasm and informed that their survey answers will be used to assess the strengths and weaknesses of the activity. In addition, any remaining ques-tions from the students are answered.
Figure 7. Students make caudal fins for robotic fish inspired by live fish in the aquarium.
Figure 6. Two robotic fish racing with student-made caudal fins.
© POL
design and test their own
biologically inspired
Results of the Program
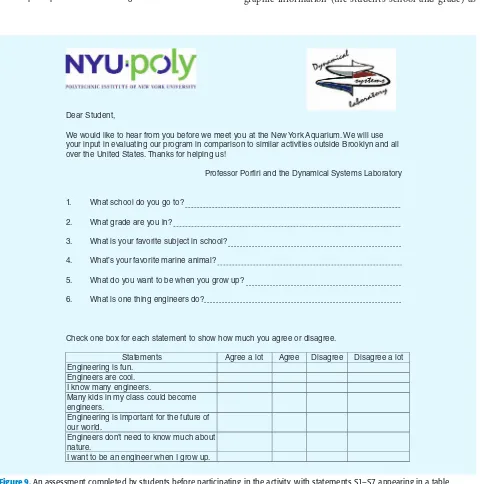
Students were given two surveys, one several days before par-ticipating in the activity (preassessment) and one immediately after (postassessment). An image of the preassessment given before the activity is shown in Figure 9. The preassessment is partitioned into two sections (fill-in-the-blank questions and statements S1–S7) with which students must rate their agree-ment. The postassessment includes fill-in-the-blank questions and statements S1–S7 as well as statements S8–S10, reported in the caption of Figure 10, and a drawing component. The surveys are intended to analyze the students’ notion/under-standing of engineering professions, their interest in STEM careers, and the feasibility of these careers to them.
The fill-in-the-blank questions ask for basic demo-graphic information (the student’s school and grade) as
Figure 8. Prof. Porfiri, high school student Andrew Chen, and student participants discuss the design of robotic fish.
Dear Student,
We would like to hear from you before we meet you at the New York Aquarium. We will use your input in evaluating our program in comparison to similar activities outside Brooklyn and all over the United States. Thanks for helping us!
Professor Porfiri and the Dynamical Systems Laboratory
1. What school do you go to?
2. What grade are you in?
3. What is your favorite subject in school?
4. What’s your favorite marine animal?
5. What do you want to be when you grow up?
6. What is one thing engineers do?
Check one box for each statement to show how much you agree or disagree.
Statements Agree a lot Agree Disagree Disagree a lot
Engineering is fun. Engineers are cool. I know many engineers.
Many kids in my class could become engineers.
Engineering is important for the future of our world.
Engineers don’t need to know much about nature.
I want to be an engineer when I grow up.
Figure 9. An assessment completed by students before participating in the activity, with statements S1–S7 appearing in a table format.
POL
YTECHNIC INS
TI
TUTE OF NEW
Y
ORK UNIVER
SI
well as a comfort question (what is the student’s favorite marine animal), which is designed to put the student at ease while completing the survey. The relevant questions for assessing change in the student’s perception of STEM ask for the student’s favorite subject in school, what the student wants to be when he or she grows up, and one thing that engineers do.
A total of 62 students from a fourth-grade class and a sixth-grade class were surveyed before visiting the aquari-um, and 50 students participated in the fun-science activity. The ages and socioeconomic backgrounds of students in both classes, separately participating in the activity over two days, are parallel as both classes come from local, pub-lic schools within a 1-mi distance from each other. In light of this similarity, their surveys are combined to afford a larger sample of preassessment and postassessment responses analyzed in this section.
The responses for their favorite school subject are parti-tioned into STEM and non-STEM disciplines, with multi-ple responses considered as STEM if they include at least one STEM discipline. Blank responses are discarded. The preassessment shows 71% of surveyed students preferring STEM fields and 29% preferring non-STEM fields. The postassessment suggests an increase in STEM preference, with 80% of students preferring STEM to 20% preferring non-STEM.
The responses regarding career aspirations, what the students would like to be when they grow up, are also partitioned into STEM and non-STEM fields. Multiple responses are counted as STEM if they include at least one STEM career. If “doctor” is considered a STEM profes-sion, then a decline from 45% of students considering STEM careers before the activity to 38% after the activity is observed. However, excluding doctor responses, the STEM careers to which the students aspire rise from 21 to 26% of the remaining responses, which hints at an increased interest in the less visible STEM professions. Additionally, of the non-STEM careers favored by the par-ticipants, approximately 25% chose police officer or undercover cop consistently in the preassessment and postassessment, which speaks about the more visible careers in their socioeconomic environment.
Students’ answers to the question “What is one thing engineers do?” sheds light on the changing perceptions after the fun-science activity. Perhaps due to confusion over the difference between a mechanic and a mechanical engi-neer, 23% of students in the preassessment gave automo-tive-related responses to this question, such as fix or make cars. However, the postassessment shows only 13% of stu-dents had automotive-related answers. Additionally, the students’ responses are partitioned into three thematic sub-sets: fabrication (make things), maintenance (fix things), and other. The preassessment shows 39% fabrication, 49% maintenance, and 12% other responses. The postassess-ment shows a shifting distribution, with 46% fabrication, 30% maintenance, and 24% other responses. The other
responses are generally discovery oriented, such as invent things, design new things, discover things and modeling, and build models of things they are going to do. These responses, in particular, may be the result of students inter-nalizing the basic scientific method by simultaneous expo-sure to many aspects of the design process during the event at the NYAQ.
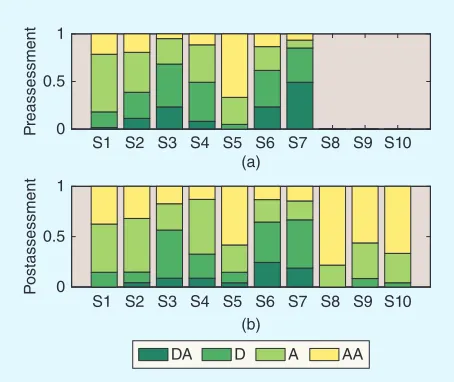
F i g u r e 1 0 s h o w s stacked bar graphs repre-senting the distribution of students’ agreement or disagreement with state-ments S1–S7 on the pre-assessment and S1–S10 on the postassessment. As stated above, state-ments without response or with multiple respons-es to the same statement are excluded from this analysis. S1 and S2 are designed to test the per-ception of the engineer-ing discipline. S3 asks for demographic informa-tion about the students’ personal ties to
engineer-ing professionals. S4 is written to test the accessibility of engineering as a career to the students. S5 and S6 seek to garner information about the importance of engineering. S7 explicitly inquires as to the students’ desire to pursue careers in engineering.
Figure 10. Stacked bar graphs of student agreement percentages (a) before and (b) after the activity. AA denotes agree a lot; A denotes agree; D denotes disagree; and DA denotes disagree a lot. Additional statements appearing only in the postassessment are S8: “I learned a lot today,” S9: “I would like to have more engineering presentations like this one in the future,” and S10: “Today’s visit made engineering look fun.”
Broadly examining the distributions in Figure 10, S1 and S4 show trends toward more agreeable perceptions after the ity. S5 and S6 stay relatively constant before and after the activ-ity, and S7 shows a remarkable shift toward agreement in the postassessment. These trends are consistent with the preactivi-ty hypotheses that S1, S2, S4, S5, and S7 show positive shifts
and S6 shows a negative shift as a result of the activ-ity. The trend seen in S3 is not part of the set hypotheses but rather an observation of students’ engineering climate.
For a statistical per-spective on this data, a nonparametric Mann-Whitney U test is per-formed to ascertain the statistical significance of the differences observed between the preassess-ment and the postassess-ment responses [27]. This test is selected among others since it can be used to extract quantitative information from surveys whose answers are ordinal and nonnumerical. The p values with p10 05. are
taken to be statistically significant, 0 05. #p10 10. to be
weakly statistically significant, and p$0 10. to be not
sta-tistically significant (see, for example, [27]). The p values computed for statements S1, S2, and S4–S7 are, respectively, 0.077, 0.036, 0.077, 0.107, 0.036, and 0.077. This shows that the positive and negative shifts of responses to statements S2 and S6, respectively, are statistically significant and the positive shifts of responses to S1, S4, and S7, respectively, are weakly statistically significant. Only the positive shift in S5 shows no statistical significance, although its p value is close to the threshold value of 0.10. These results provide statistical support to the observed enthusiasm and excite-ment of students during the activity.
In addition, the postassessment includes three state-ments S8–S10 to ascertain the students’ perception of the fun-science activity itself (see Figure 10). From the over-whelmingly positive responses to these three questions, it is seen that the students had an interest in STEM fields, found engineering to be an accessible discipline, and had fun participating in the activity.
To allow less verbal students an opportunity to express what they learned from the activity, the postassessment includes a drawing component in which the students are asked to draw their own robotic fish using colored pencils. Samples of their drawings are shown in Figure 11. The various caudal fin shapes in Figure 11 show evidence that the exercise of modifying the fin shape to test the influence on swimming impacted the students’ designs in their fish sketches.
Conclusions
In this article, the format, experience, and results of an inter-active robotics-based outreach activity that was designed to ignite the interests of K–12 students in STEM fields and attract them toward careers in engineering have been pre-sented. The activity engaged local elementary school and middle school classes at the NYAQ in Brooklyn, with DSL members and high school student docents. The participating students were given a guided tour of fish exhibits at the aquarium, with a short lecture on live fish swimming mecha-nisms, and were then asked to use their creativity and knowl-edge of fish to engineer and test caudal fins on robotic fish.
The materials created for the activity, namely, a promo-tional brochure, a poster developed by two high school students, and biomimetic fishlike robots used during the interactive engineering phase, were described. The robots included modular features that allowed participants to design and test their own biologically inspired caudal fins. Using a remote control, these robots provided a perfect platform for increasing the students’ interests in engineering activities. The impact of the activity on the student participants was assessed using self-report surveys administered to the students before and after participating in the activity.
Survey results showed a clear impact of the activity in fos-tering positive perceptions of engineering professions, increased interest in STEM careers, and the openness of these careers to the students. This success can be attributed to the
Figure 11. Sample drawings of fish and robotic fish by students.
POL
YTECHNIC INS
TI
TUTE OF NEW
Y
ORK UNIVER
SI
TY
A total of 62 students from
a fourth-grade class and a
sixth-grade class were
surveyed before visiting the
aquarium, and 50 students
participated in the
simultaneous orchestration of the following elements: 1) the use of visually attractive and interactive robots, 2) active involvement in authentic biologically inspired engineering designs, 3) the integration of robotics and marine science, 4) an informal setting for STEM learning at the NYAQ, 5) the partic-ipation of an age and gender diverse cadre of university and high school students, and 6) the distribution and onsite presen-tation of educational material prepared by high school students bridging college with middle/elementary school learning.
Acknowledgments
This research was supported by the NSF under CAREER grant CMMI-0745753, GK–12 fellows grant DGE-0741714, and through a Graduate Research Fellowship to Vladislav Kopman under grant DGE-1104522. The authors are thankful to Dr. Chanda Bennett, Melissa Carp, and Robert Cummings at the NYAQ for their invaluable partnership in this project; Andrew Chen and Daniil Karpov for their active participation in the preparation of this activity; Ken Koga- Moriuchi for his advice on fish and great students; Karl Abdelnour, Matteo Aureli, Irina Igel, Jenny Lin, and Chris Xu for bringing their enthusiasm to the events; Maria Grillo for a beautiful documentation of the event; Dr. San-dra Huret and Dr. Oded Nov for helping to create an assess-ment and analyzing the data; and all the student and teacher participants formaking this activity a reality.
References
[1] D. W. Callahan and L. B. Callahan, “Looking for engineering students? Go home,” IEEE Trans. Educ., vol. 47, no. 4, pp. 500–501, 2004.
[2] M. F. Kazmierczak, Losing the Competitive Advantage? The Challengefor Science and Technology in the United States. Washington, DC: AeA, Advancing the Business of Technology, 2005.
[3] K. Cannon, M. A. Lapoint, N. Bird, K. Panciera, H. Veeraraghavan, N. Papanikolopoulos, and M. Gini, “Using robots to raise interest in technology among underrepresented groups,” IEEE Robot. Automat. Mag., vol. 14, no. 2, pp. 73–81, 2007.
[4] E. Matson, S. DeLoach, and R. Pauly, “Building interest in math and sci-ence for rural and underserved elementary school children using robots,” J. STEM Educ., vol. 5, no. 3, pp. 35–46, 2004.
[5] J. Johnson, “Children, robotics, and education,” Artif. Life Robot., vol. 7, no. 1–2, pp. 16–21, 2003.
[6] R. Mitnik, M. Recabarren, M. Nussbaum, and A. Soto, “Collaborative robotic instruction: A graph teaching experience,” Comput. Educ., vol. 53, no. 2, pp. 330–342, 2009.
[7] C. Pomalaza-R aez and B. H. Groff, “Retention 101: Where robots go . . . students follow,” J. Eng. Educ., vol. 92, no. 1, pp. 1–6, 2003.
[8] F. Taban, E. Acar, I. Fidan, and A. Zora, “Teaching basic engineering con-cepts in a K–12 environment using LEGO bricks and robotics,” in ASEE Annu. Conf. Proc., Portland, OR, 2005.
[9] A.-J. Baerveldt, T. Salomonsson, and B. Astrand, “Vision-guided mobile robots for design competitions,” IEEE Robot. Automat. Mag., vol. 10, no. 2, pp. 38–44, 2003.
[10] B. S. Barker and J. Ansorge, “Robotics as means to increase achievement scores in an informal learning environment,” J. Res. Technol. Educ., vol. 39, no. 3, pp. 229–243, 2007.
[11] S. Bruder and K. Wedeward, “Robotics in the classroom,” IEEE Robot. Automat. Mag., vol. 10, no. 3, pp. 25–29, 2003.
[12] L. Greenwald and J. Kopena, “Mobile robot labs,” IEEE Robot. Automat. Mag., vol. 10, no. 2, pp. 25–32, 2003.
[13] E. M. Jimenez Jojoa, E. C. Bravo, and E. B. Bacca Cortes, “Tool for experi-menting with concepts of mobile robotics as applied to children’s education,” IEEE Trans. Educ., vol. 53, no. 1, pp. 88–95, 2010.
[14] T. Karp, R. Gale, L. A. Lowe, V. Medina, and E. Beutlich, “Generation NXT: Building young engineers with LEGOs,” IEEE Trans. Educ., vol. 53, no. 1, pp. 80–87, 2010.
[15] O. Miglino, H. H. Lund, and M. Cardaci, “Robotics as an educational tool,” J. Interact. Learn. Res., vol. 10, no. 1, pp. 25–47, 1999.
[16] R. Mitchell, K. Warwick, W. N. Browne, M. N. Gasson, and J. Wyatt, “Engaging robots: Innovative outreach for attracting cybernetics students,” IEEE Trans. Educ., vol. 53, no. 1, pp. 105–113, 2010.
[17] J. M. Mirats Tur and C. F. Pfeiffer, “Mobile robot design in education,” IEEE Robot. Automat. Mag., vol. 13, no. 1, pp. 69–75, 2006.
[18] R. R. Murphy, ““Competing” for a robotics education,” IEEE Robot. Automat. Mag., vol. 8, no. 2, pp. 44–55, 2001.
[19] C. Rogers and M. Portsmore, “Bringing engineering to elementary school,” J. STEM Educ., vol. 5, no. 3–4, pp. 17–28, 2004.
[20] J. Ruiz-del-Solar, “Robotics-centered outreach activities: An integrated approach,” IEEE Trans. Educ., vol. 53, no. 1, pp. 38–45, 2010.
[21] M. Chyba and R. N. Smith. (2012, June 11). Robo-nemo: Educating youth about ocean research!, University of Hawaii at Manoa. [Online]. Available: http://www.math.hawaii.edu/stomp/STOMP/robonemo/
[22] P. van Lith and J. Caska. (2007, Jan.). RoboDidactics Manual. [Online]. Av a i l a ble : ht t p://w w w. mondo d i g it a le .or g /f i le s/pu bl ic at ion s/f i l / robo‘MANUALE2’1.pdflf.
[23] N. Abaid and M. Porfiri, “Fish in a ring: Spatio-temporal pattern forma-tion in one-dimensional animal groups,” J. Royal Soc. Interface, vol. 7, no. 51, pp. 1444–1453, 2010.
[24] M. Aureli, V. Kopman, and M. Porfiri, “Free-locomotion of underwater vehicles actuated by ionic polymer metal composites,” IEEE/ASME Trans.
Mechatron., vol. 15, no. 4, pp. 603–614, 2010.
[25] M. Aureli, F. Fiorilli, and M. Porfiri, “Interactions between fish and robots: An experimental study,” in Proc. ASME DSCC—Dynamic Systems and Control Conf., Cambridge, MA, Sept. 2010, paper WeBT3.3.
[26] M. Shahinpoor and K. J. Kim, “Ionic polymer-metal composites: I.
Funda-mentals,” Smart Mater. Struct., vol. 10, no. 4, pp. 819–833, 2001.
[27] G. Keller, Statistics for Management and Economics, 8th ed. Mason, OH: South-Western College Publ., 2008
Nicole Abaid, Department of Mechanical and Aerospace Engineering, Polytechnic Institute of New York University, Brooklyn, NY 11201. E-mail: [email protected].
Vladislav Kopman, Department of Mechanical and Aerospace Engineering, Polytechnic Institute of New York University, Brooklyn, NY 11201. E-mail: [email protected].