PEMANFAATAN KOMPUTER PADA SISTEM KONTROL DENGAN MENGATUR
SET-OFF SAAT KONDISI TUNAK (STEADY STATE)
Saiful Manan
Program Diploma III Teknik Elektro Fakultas Teknik Universitas Diponegoro
Abstracts
Saiful Manan, in paper control system with set-off define at steady state using kompuer explain that automatic control systems have the develope which enough mean with growth of science and technology. this control systems Theory give the easier to design the system to get the performance from system dinamics, heightening quality and fast produce that is by regulasi at functioning kontroller or kompensator to maintain the certain circumstance [is] such as those which wanted if system get sinyal trouble from outside system and also from within system xself.
set-off of condition of steady state is one other require to be considered in system dynamics so that a value finally can be arranged at time moment come to infinite. By exploiting this matter computer can be done with interest easy to and respon which quickly.
computer exploiting done for the adjust of set the point or referens so that obtained set off is equal to zero. Key word : microcomputer, set point, steady state.
I. PENDAHULUAN
Sistem kontrol automatik telah mengalami suatu perkembangan yang cukup berarti, sejalan dengan perkembangan ilmu pengetahuan dan teknologi akhir-akhir ini. Sistem kontrol automatik ini selain diperlukan pada pesawat ruang angkasa, satelit, sistem peluru kendali, pesawat terbang dan sebagainya telah menjadi bagian yang penting dan terpadu dari proses-proses pada pabrik dan industri modern. Misalnya operasi-operasi industri untuk mengontrol tekanan, temperatur, kelembaman, viskositas dan aliran, pengerjaan dengan mesin perkakas, perakitan bagian-bagian mekanik dalam industri manufaktur dan sebagainya.
Kemajuan teori sistem kontrol otomatik ini memberikan kemudahan untuk mendapatkan performans/kinerja dari sistem dinamik, mempertinggi kualitas dan laju produksi, meniadakan pekerjaan-pekerjaan rutin yang dilakukan manusia, maka sebagian besar ahli teknologi rekayasa dan ilmuwan seharusnya mempunyai pemahaman yang cukup dalam bidang sistem kontrol ini.
Sistem kontrol pada umumnya masih menggunakan kontroller analog dan beberapa operator yang bertugas mengawasi jika terjadi kesalahan set off. Jika terjadi kesalahan maka operator akan memperbaiki atau merubah 'set point' atau sinyal acuan sehingga diperoteh 'set-off' seperti yang diinginkan. Pada sistem kontrol tidak dikehendaki adanya kesalahan 'set-off' antara harga atau nitai yang dikehendaki dengan harga/nilai yang sebenarnya, baik karena adanya perubahan set point (sinyal acuan) maupun adanya sinyal gangguan.
Pada umumnya sistem kontrol otomatik
adalah regulasi yaitu kontroller/kompensator yang berfungsi untuk mempertahankan keadaan tertentu seperti yang diinginkan jika sistem mendapat sinyal gangguan baik dari luar maupun dari sistem sendiri.
Pada makalah ini, sistem diinginkan mempunyai 'set-off' pada kondisi tunak sama dengan nol. Akan membahas penggunaan mikrokomputer pada sistem kontrol automatik ini sehingga dapat memperbaiki kinerja jika terjadi kesalahan 'set-off' atau 'set-off' mempunyai harga tertentu yaitu dengan cara merubah 'setpoint' atau sinyal acuan/referens sehingga diperoteh 'set-offset' sama dengan nol.
II. DASAR-DASAR SISTEM KONTROL
Sistem adalah elemen-elemen atau komponen-komponen yang bekerja sama sehingga membentuk fungsi tertentu yang menghasilkan output/keluaran seperti yang diinginkan dengan input/masukan tertentu. Berdasar sinyal yang digunakan, sistem dibedakan antara sistem diskrit dan sistem kontinyu. Sistem kontinyu adalah sistem yang menggunakan sinyal kontinyu untuk mengolah sinyal informasi yang ada dalam sistem, sedangkan sistem diskrit adalah sistem yang menggunakan sinyal diskrit untuk mengolah data.
Untuk menganalisa atau merancang suatu sistem dengan menggunakan metoda-metoda sistem kontrol, sistem fisis terlebih dahulu harus dinyatakan dalam bentuk matematis selanjutnya dilakukan transformasi dalam bentuk transformasi Laplace. Sistem fisis yang sudah dalam bentuk matematis transformasi Laplace tersebut biasa disebut sebagai model matematis sistem fisis, karena sistem fisis tersebut harus
bisa dinyatakan dalam bentuk transformasi Laplace, maka sistem harus linear jika terdapat elemen-elemen non linear hams dilakukan linearisasi, salah satu sifat penting sistem linear adalah berlakunya teorema superposisi.
Setelah dilakukan analisa atau perancangan dengan menggunakan metoda-metoda sistem kontrol maka model matematis hasil analisa atau perancangan sistem tersebut harus dapatdikembalikan ke bentuk semula yaitu dalam bentuk sistem fisis untuk direalisasikan.
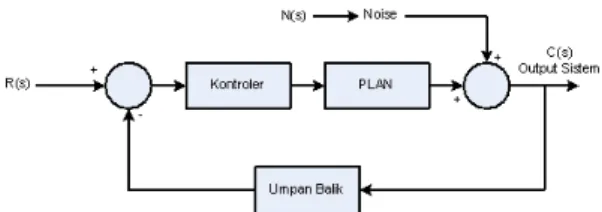
Secara garis besar suatu sistem kontrol mempunyai dua bentuk loop, loop terbuka dan bop tertutup. Sistem kontrol dengan loop tertutup adalah suatu sistem kontrol yang sinyal output atau keluaran sistem berpengaruh langsung terhadap sinyal aksi pengontrolan sistem jika terjadi atau ada gangguan sehingga bisa dikatakan bahwa sistem kontrol loop tertutup adalah sistem kontrol berumpan balik, Sinyal kesalahan pcnggcrak, yang merupakan selisih antara sinyal masukan dan sinyal umpan balik (yang dapat berupa sinyal keluaran atau fungsi sinyal keluaran dan turunannya) diumpankan ke kontroller atau kompensator untuk memperkecil kesalahan dan membuat agar keluaran sistem mendekati atau sama dengan keluaran yang diinginkan atau dengan kata lain loop tertutup adalah menggunakan aksi umpan balik untk memperkecil kesalahan.
Gambar 2.1. Diagram blok sistem pengaturan loop tertutup.
Berdasar pada sinyal input dikenal sistem servomekanik dan sistem regulasi. Pada sistem servo sinyal masukan (yang berupa 'setpoint') terjadi perubahan dan jika tidak terdapat gangguan maka output akan mengikuti sinyal input. Sedangkan pada sistem regulator sinyal input ('setpoint') adalah tetap atau tidak ada perubahan. Sistem regulator ini banyak sekali digunakan pada industri misalnya pengaturan temperatur, kecepatan aliran cairan, tinggi permukaan dan sebagainya.
Dalam merancang atau analisa sistem dengan menggunakan metoda-metoda sistem kontrol ada 4 karakteristik dasar sistem yang hares diperhatikan yaitu
• Kestabilan sistem yaitu dengan masukan terbatas maka keluaran sistem juga harus terbatas.
• Kondisi transien, yaitu karakteristik
sistem yang menunjukan kecepatan sistem saat gejala peralihan (masa transien) ketika menerima masukan maupun mendapat gangguan baik dari dalam maupun luar sistem sampai menuju keluaran seperti yang diinginkan. • Kondisi tunak (steady state) yaitu
kemampuan sistem untuk kembali kepada output yang diinginkan pada saat t (waktu) tak hingga. Karena biasanya pada sistem akan terdapat error steady state (kesalahan kondisi tunak) yaitu selisih antara output yang diinginkan dengan output sebenarnya setelah dicapai kondisi tunak (steady state), setelah menerima input atau mendapat gangguan.
• Kepekaan sistem yaitu didefinisikan sebagai ukuran penyimpangan fungsi transfer sistem terhadap parameter-parameternya jika berubah dari harga normalnya.
Untuk memperoleh karakteristik sistem yang baik dari suatu sistem kontrol, sudah banyak metoda-metoda yang digunakan dari metoda klasik misalnya metoda Bode, Root Locus, Routh Hurwitz, Nyquist dan sebagai (yang masing-masingnya mempunyai spesifikasi tersendiri) sampai metoda kontrol modern yang pada dasarnya adalah metoda-metoda untuk memperbaiki kinerja atau karakteristik sistem setelah dicapai karakteristik dasar di atas, metoda-metoda modern tersebut diantaranya metoda kontrol Optimal, Robust Control, Kalman Filter, Adaptiv Control, Fuzzy Logik dan sebagainya.
Dalam makalah ini dibahas karakteristik dasar sistem yaitu error steady state dengan cars membuat 'set-off' sama dengan nol. Hal ini dilakukan dengan mengatur 'setpoint' menggunakan bantuan mikrokomputer tanpa memperhitungkan kondisi transien.
III. SISTEM KONTROL DENGAN
MEMPERHATIKAN ‘SET-OFF’ KONDISI TUNAK (STEADY STATE)
Pada gambar 2.1. terlihat bahwa dalam sistem pengaturan loop tertutup terdiri dari elemen umpan maju (feed forward) yaitu plan dan kontroller serta elemen umpan batik (feed back). Pada umumnya jenis-jenis kontroller adalah
• Kontroller proposional adalah jenis kontroller yang memberikan suatu nilai dalam bentuk konstanta yang besarnya dapat diubah sesuai dengan yang diinginkan.
• Kontroller integral adalah jcnis kontroller yang menghasilkan keluaran yang bersifat integratif, keluarannya mempunyai sifat superposisi dari sinyal sebelumnya.
• Kontroller derivatif adalah jenis kontroller yang keluarannya mengurangi sinyal
masukan secara terus-menerus sinyal masukan. Dalam realisasinya kontroller ini tidak pernah berdiri sendiri karena akan memberikan impuls yang sangat tinggi. Untuk memperoleh performans/kinerja yang baik biasa digunakan gabungan dari masingmasing kontroller di atas, rnisalnya kontroller PI (proposional integral), PID (proposional integral derivatif) yaitu gabungan antara kontroller proposional, integral dan derivatif.
Pengaruh masing-masing jenis kontroller di atas terhadap respon sistem terhadap masukan atau gangguan baik dari luar maupun dalam sistem akan dibahas sebagai berikut. Karena sistem fisis harus dinyatakan dalam model matematis bentuk transformasi Laplace maka berlaku superposisi, untuk menganalisa pengaruh gangguan terhadap sistem dianggap masukan R(s) adalah nol dan sinyal gangguan N(s) adalah gangguan yang berupa fungsi step (A/s), A adalah konstanta, s adalah notasi operasi matematis Laplace, kontroller K(s) dan untuk memudahkan diambil sistem plan terdiri dari G1(s) dan G2(s).
Gl(s) = Ki/( sTi + t) G2(s) = K2/( sT2 + 1 ).
Dari gambar 3.1. terlihat bahwa karena dianggap R(s) = 0 ; maka C(s) = -E(s), sehingga dari loop tertutup pada gambar 2 dapat ditentukan fungsi transfer sistem sebagai berikut C(s)/N(s) :
Gambar 3.1. Diagram blok sistem kontrol dengan kontroller K(s) Dari gambar 2 ( ) ) ( ) ( ) ( 1 ) ( ) ( ) ( 2 1 2 N s s G s G s K s G s N s C + = ) ( ) ( ) ( ) ( 1 ) ( ) ( 2 1 2 N s s G s G s K s G s C + = Maka ) ( ) ( ) ( ) ( 1 ) ( ) ( 2 1 2 N s s G s G s K s G s E + − =
Dengan memasukan nilai-nilai G1(s) dan G2(s) diperoleh : ) ( 1 . 1 ). ( 1 1 ) ( 2 2 1 1 2 2 s N sT K sT K s K sT K s E + + + + − = ) ( ). ( ) 1 )( 1 ( ) 1 ( ) ( 2 1 2 1 1 2 N s K K s K sT sT sT K s E + + + + − =
Sesuai dengan teorema harga akhir dari teorema transformasi Laplace yaitu bahwa f(t) akan
mendekati suatu harga tertentu saat t (waktu) menuju tak hingga adalah sama dengan perilaku sF(s) disekitar s = 0 maka berlaku
) ( lim ) ( lim 0sF s t f s t→∞ = →
Error kondisi tunak saat t menuju tak hingga ess didefinisikan sebagai harga e(t) yang
mendekati harga tertentu saat t menuju tak hingga maka berlaku ) ( lim ) ( lim 0sE s t e e s t ss = →∞ = → ) ( . . ). ( ) 1 )( 1 ( ) 1 ( lim 2 1 2 1 1 2 sN s K K s K sT sT sT K e t ss + + + + − = ∞ →
Jika N(s) adalah gangguan berupa fungsi step A/s maka s A s K K s K sT sT sT K e t ss .. ). ( ) 1 )( 1 ( ) 1 ( lim 2 1 2 1 1 2 + + + + − = ∞ → (1)
Dengan menggunakan persamaan di atas maka dapat dihitung error ‘ set-off ‘ kondisi tunak dari berbagai jenis kontroller.
Pada makalah ini diambil kotroller Proposional Integral derivative atau PID. Kontroller PID mempunyai model matematis dalam bentuk persamaan sebagai berikut :
) 1 1 ( ) ( d i p c sT sT K s K = + +
Dengan memasukan nilai Kc(s) pada persamaan
(1) maka diperoleh persamaan : ess = 1 lim 2 2 0− + → sT K s x
(
)(
)
(
)(
)
s A s sT sT K K K sT sT sT sT K j d p . 1 1 1 1 1 1 2 1 2 1 2 1 2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + + + + + + = 0Dari perhitungan diatas terlihat bahwa pada controller PID bisa dibuat error (penyimpangan) kondisi tunak sama dengan nol selain mempunyai respon dan kestabilan yang lebih baik disbanding kotroller integral (PI) maupun controller derifative (PD).
IV. PENGGUNAAN KOMPUTER DALAM SISTEM KONTROL DENGAN MEMPERHATIKAN KESALAHAN (SET-OFF) SAAT KONDISI TUNAK
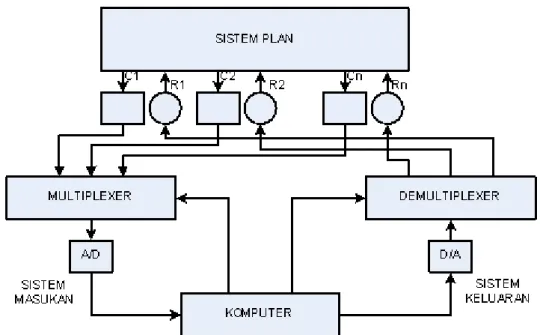
Pada system ini komputer tidak langsung mengendalikan sistem, namun komputer hanya menentukan harga referensi R1, R2 seperti dalam gambar 4.1. Realisasi gambar 4.1. dapat digambarkan dalam bentuk diagram blok seperti pada gambar 4.2. Dengan asumsi bahwa kecepatan sinyal gangguan pada sistem lebih lambat dari kecepatan pengolahan data mikrokomputer dan dengan menambahkan kontroler diskrit PI (proporsional Integral). Digunakan kontroler PI
karena kontroler PI akan menghasilkan offset sama dengan nol, sehingga dengan menggunakan kontroler ini diinginkan ‘offset’ sama dengan nol.
Diagram blok sistem fisis diatas dapat digambarkan seperti gambar berikut dalam diagram blok matematis seperti pada gambar 4.3.
Gambar 4.1. Pengendalian sistem dengan menggunakan komputer
Gambar 4.2. Diagram blok sistem kontrol dengan komputer
Gambar 4.3. Diagram blok matematis
Prinsip kerja dari sistem tersebut adalah sebagai berikut. Kd(s) adalah kontroler yang dapat direalisasikan dalam bentuk sinyal diskrit, krontroler ini berfungsi untuk menghilangkan kesalahan ‘offset’ yang terjadi pada sistem kontrol analog terhadap adanya gangguan yang terjadi dalam sistem.
Sinyal terukur output C(s) disamping dikirimkan ke kontroler analog juga dikirim ke mikrokomputer melalui rangkaian ‘multiplexer’
dan rangkaian pengubah analog ke digital (A/D). Diambil kontroler analog ini adalah kontroler proporsional Kp(s)karena kontroler ini menghasilkan kesalahan yang besar.
Mikrokomputer mengolah data perbedaan sinyal keluaran C(s) dan data ‘set point’ S(s) untuk menentukan ‘set point’ ke kontroler analog R(s) sedemikian rupa sehingga diperoleh C(s) = S(s) atau E(s) = S(s)-C(s), sehingga kita bisa mengatur kesalahan dengan,
e(min) < e(t) < e (maks)
dimana e minimum dan e maksimum adalah batas kesalahan yang bisa ditentukan sebelumnya.
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = i pd d sT K s K ( ) 1 1
Dengan menggunakan persamaan (1) maak dapat dihitung kesalahan pada kondisi tunak sebagai berikut : ) ( ) (s C s E =− ( ) [ ] s A s K K K sT K sT sT sT sT sT K p i d i i .. . 1 1 ) 1 )( 1 ( ) 1 ( . 2 1 2 1 1 2 − + + + + + − =
Maka kesalahan (‘setoff’) pada kondisi tunak adalah dengan mengambil limit diatas yang adalah
) ( . lim 0sE s ess s→ = ( )
[
]
s A s K K K sT K sT sT sT sT sT K p i d i i s ( 1)( 1) 1 1 . .. ) 1 ( . lim 2 1 2 1 1 2 0 + + + + − + − = → = 0Berdasar perhitungan di atas terlihat bahwa controller proposional jika tanpa Kd akan terjadi set-off atau set-off mempunyai nilai tertentu tetapi dengan tambahan Kd yang dipasang cascade set-off bisa diperkecil bahkan berharga nol. Algoritma controller proposional integral Kd(s) adalah merupakan controller dalam bentuk diskrit. Model matematis controller proposional integral tersebut adalah :
∫
+ = t i p et dt T t e K t r() () 1 0 ( )Dengan operator diskrit maka diperoleh :
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + =
∑
= k n i p en T k e K k r 0 ) ( 1 ) ( ) ( Jika Ki = Kp(T/Ti), maka∑
= + = k n i pek K en K k r 0 ) ( ) ( ) (Dan jika terdapat tunda sekali maka
∑
= − + − = − k n i pek K e n K k r 0 ) 1 ( ) 1 ( ) 1 (Dengan mengurangkan antara k dan k-1 maka
[
( ) ( 1)]
( ) ) 1 ( ) (k r k K ek ek Kek r = − + p − − + iDari diagram blok terlihat bahwa : ) ( ) ( ) (k s k ck e = − ) 1 ( ) 1 ( ) 1 (k− =sk− −ck− e
Dengan substitusi persamaan di atas maka diperoleh persamaan :
[
( ) ( ) ( 1) ( 1) ) 1 ( ) (k =r k− +K sk −ck −s k− +c k−]
r p +Ki[
s(k)−c(k)]
Karena S adalah set point sehinggai s(k) = s(k-1) maka
[
( 1) ( )]
[
( ) ( )]
) 1 ( ) (k r k K c k c k K sk c k r = − + p − − + i −Persamaan dapat direalisasikan dalam bentuk diskrit maupun program komputer.
Yang perlu diperhatikan bahwa dalam menentukan konstanta-konstanta ini harus dipilih yang sedemikian rupa sehingga kondisi tunak dapat dicapai dalam waktu secepat mungkin seperti yang diinginkan yaitu dengan memperhatikan kaidah-kaidah yang berlaku dalam perancangan sistem kontrol misalnya metoda Root Locus, Routh-Hurwitz dan sebagainya sehingga pemilihan komponen pendukung bukan didasarkan pada metoda coba-coba atau bongkar pasang.
V. KESIMPULAN
Dari uraian diatas dapat diambil kesimpulan sebagai berikut :
• Pada sistem kontrol dengan kontrol proporsional maka setoff akan mempunyai nilai apabila terjadi perubahan set point atau adanya gangguan.
• Dengan penambahan kontrol pembantu yaitu dengan menggunakan set point pada komputer maka setoff dapat dihilangkan atau sama dengan nol.
• Dalam menentukan kosntanta-konstanta kontroler harus dipilih yang baik atau linier sehingga kondisi tunak bisa dicapai dalam waktu secepat mungkin seperti yang diinginkan yaitu dengan memperhatikan kaidah-kaidah yang berlaku dalam sistem kontrol misalnya root locus, bode dan sebagainya.
• Dalam merancang suatu sistem kontrol otomatik sebaiknya memperhatikan kaidah-kaidah sistem kontrol otomatik untuk memperolah hasil yang sesuai dengan yang diinginkan atau tidak menggunakan metode coba-coba.
DAFTAR PUSTAKA
1. Katsuhiko Ogata, 1991, Teknik Kontrol Otomatik, Jilid 1 & 2, Erlangga, Jakarta. 2. Charles L. Phillips, Royce D. Harbor, 1996,
Sistem Kontrol Lanjutan, Prenhelindo, Jakarta.
3. William H. Hayt Jr., 1993, Elektromagnetika Teknologi, Erlangga, Jakarta.
4. Institut Teknologi Bandung, 1995, Seminar And Workshop On Power System Dynamics And Control, Institut Teknologi Bandung, Bandung.
5. Erwin Kreyszig, 1988, Advanced
Engineering Matematics, John Wiley & Sons.