FAKULTET STROJARSTVA I BRODOGRADNJE
ZAVRŠNI RAD
Antonija Marčina
FAKULTET STROJARSTVA I BRODOGRADNJE
Algoritam bočnog parkiranja vozila
Mentor: Student:
Prof. dr. sc. Zoran Lulić, dipl. ing. Antonija Marčina
Izjavljujem da sam ovaj rad izradila samostalno koristeći znanja stečena tijekom studija i navedenu literaturu.
Zahvaljujem svojem mentoru prof. dr. sc. Zoranu Luliću na ukazanoj pomoći i vremenu utrošenom prilikom izrade rada te doc. dr. sc. Goran Šagiju na ukazanoj pomoći i savjetima.
Zahvaljujem svojoj obitelji, prijateljima i kolegama na podršci tijekom studiranja. Posebno zahvaljujem svojem Josipu na beskrajnoj i bezuvjetnoj potpori.
SADRŽAJ
POPIS SLIKA ... II POPIS TABLICA ... III POPIS OZNAKA I MJERNIH JEDINICA ... IV SAŽETAK ... VI SUMMARY ... VII
1. UVOD ... 1
2. PREGLED SUVREMENIH SUSTAVA AUTOMATSKOG PARKIRANJA ... 2
2.1. Razvoj sustava za pomoć pri parkiranju ... 2
2.2. Automatizirani sustavi za parkiranje u serijskoj proizvodnji vozila ... 3
2.3. Autonomna vozila ... 5
3. KINEMATIČKA ANALIZA PARALELNOG PARKIRANJA ... 7
3.1. Ackermannov princip zakretne geometrije ... 7
3.2. Trajektorija paralelnog parkiranja ... 12
3.3. Minimalna veličina parkirnog mjesta ... 15
3.4. Minimalni skup podataka ... 16
4. ALGORITAM PARALELNOG PARKIRANJA VOZILA ... 18
4.1. Oprema za upravljanje vozilom i određivanje informacija iz okoliša ... 18
4.2. Algoritam ... 19
5. SIMULACIJA PARALELNOG PARKIRANJA U MATLAB-u ... 22
6. EKSPERIMENT S LEGO EV3 VOZILOM ... 26
6.1. Lego EV3 model vozila... 26
6.2. Eksperiment ... 28 6.2.1. Ispitivanje I. ... 30 6.2.2. Ispitivanje II. ... 32 6.2.3. Ispitivanje III. ... 34 6.3. Usporedba rezultata ... 37 ZAKLJUČAK ... 38 LITERATURA ... 39 PRILOZI ... 40
POPIS SLIKA
Slika 1. Parkirna mjesta u centru Zadra [2] ... 1
Slika 2. Isječak iz časopisa iz 1934. godine u kojem je opisan sustav pomoći pri parkiranju [3] ... 2
Slika 3. Ligier električno vozilo [4] ... 3
Slika 4. Odabir parkirnog mjesta na zaslonu u vozilu Lexus [6] ... 4
Slika 5. Kia Sportage pomoć pri parkiranju [7] ... 5
Slika 6. Ključ BMW-a serije 7 [8] ... 6
Slika 7. Ackermannov princip zakretne geometrije ... 7
Slika 8. Model s jednim tragom kotača ... 8
Slika 9. Kružni vijenac potreban za vožnju kroz zavoj ... 10
Slika 10. Geometrija prednjeg vanjskog kotača ... 12
Slika 11. Trajektorija gibanja paralelnog parkiranja ... 13
Slika 12. Geometrija paralelnog parkiranja ... 14
Slika 13. Minimalna duljina i širina parkirnog mjesta ... 15
Slika 14. Skup podataka o parkirnom mjestu ... 16
Slika 15. Upravljačka jedinica ... 19
Slika 16. Dijagram toka paralelnog parkiranja ... 21
Slika 17. Izlazne poruke programa u slučaju odabira neodgovarajućeg parkirnog mjesta ... 22
Slika 18. Simulacija I ... 23
Slika 19. Simulacija II... 24
Slika 20. Simulacija III ... 24
Slika 21. Lego EV3 Brick upravljačka jedinica... 26
Slika 22. Lego EV3 model vozila ... 27
Slika 23. Algoritam u Lego Mindstormsu ... 29
Slika 24. Ispitivanje I. ... 31
Slika 25. Simulacija – Ispitivanje I. ... 32
Slika 26. Ispitivanje II. ... 33
Slika 27. Simulacija - Ispitivanje II. ... 34
Slika 28. Ispitivanje III. ... 35
Slika 29. Izlazna poruka programa – Ispitivanje III. ... 36
POPIS TABLICA
Tablica 1. Oznake i značenje korištene u dijagramu toka ... 19
Tablica 2. Ulazne vrijednosti programa ... 23
Tablica 3. Podaci o Lego EV3 vozilu ... 26
Tablica 4. Minimalna veličina parkirnog mjesta ... 28
Tablica 5. Ulazne vrijednosti – Ispitivanje I. ... 30
Tablica 6. Ulazne vrijednosti – Ispitivanje II. ... 32
POPIS OZNAKA I MJERNIH JEDINICA
Oznaka Mjerna jedinica Značenje
𝑏 m širina traga kotača
𝑏𝑚𝑖𝑛 m minimalna širina parkirnog mjesta
𝑏𝑝 m širina parkirnog mjesta
𝑏𝑣 m širina vozila
𝐷 m udaljenost stražnje osovine kotača od početnog položaja parkiranja
L m duljina parkirnog mjesta
𝑙 m međuosovinski razmak
𝐿𝑚𝑖𝑛 m minimalna duljina parkirnog mjesta
𝑙𝐴𝐵, 𝑙𝐵𝐶 m duljina kružnog luka
𝑙𝑢𝑘𝑢𝑝𝑛𝑜 m ukupna duljina vozila
𝑙1, 𝑙2 m udaljenost težišta od prednje odnosno stražnje osovine
𝑟𝑡 m polumjer kotača
𝑟, 𝑟1, 𝑟2 m polumjer zakretanja vozila
𝑅𝑚𝑎𝑥 m maksimalni polumjer vanjske prednje točke vozila u gibanju kroz zavoj
𝑅𝑚𝑖𝑛 m minimalni polumjer unutarnje stražnje točke vozila u gibanju kroz zavoj
𝑣𝑧𝑣𝑢𝑘 m/s brzina zvuka
X m udaljenost vozila od parkiranog vozila određena
senzorom
𝑤𝑡 m širina kotača
α ° kut
𝛥𝑅 m kružni vijenac gibanja vozila kroz zavoj
𝛿𝐴 ° Ackermannov kut
𝛿𝑢 ° kut zakreta unutarnjeg kotača
SAŽETAK
Cilj ovog rada je izraditi algoritam za paralelno parkiranje vozila, rad obuhvaća kinematiku parkiranja, matematički model na kojem se temelji algoritam i testiranje algoritma Lego EV3 vozilom.
Drugo poglavlje je pregled sustava automatskog parkiranja, od samih početaka i ideja o pomoći pri parkiranju do suvremenih sustava ugrađenih u vozila.
U trećem poglavlju razrađen je tijek parkiranja, temeljen na Ackermannovom principu zakretne geometrije, opisan je cjelokupni postupak paralelnog parkiranja i određen je minimalni skup podataka kojim se definira sam postupak.
Algoritam za paralelno parkiranje razrađen je u četvrtom poglavlju, na temelju kojeg je napravljen matematički model u programsku paketu Matlab.
U šestom poglavlju predstavljen je eksperiment s Lego EV3 vozilom kojim je testiran predloženi algoritam.
SUMMARY
Purpose of this thesis is to make an algorithm of parallel parking of the vehicle, thesis covers parking kinematics, the mathematical model which the algorithm is based on and testing the algorithm with Lego EV3 vehicle.
The second chapter is an overview of automatic parking systems, from the very beginnigs and first ideas of parking assist to contemporary systems built in the vehicles. The third chapter describes parallel parking trajectory based on Ackermann steering geometry, whole parallel parking procedure and minimum data set needed for defining the procedure.
The fourth chapter describes an algorithm of parallel parking based on which is made the Matlab program.
The sixth chapter presents an experiment with Lego EV3 vehicle which tests proposed algorithm.
1.
UVOD
Svake godine broj vozila na prometnicama raste, kako osobnih vozila tako i gospodarskih, rezultirajući u sve većem problemu nedostatka parkirnih mjesta posebice u gradovima i urbanim sredinama. Prema podacima Međunarodne organizacije proizvođača motornih vozila (eng. International Organization of Motor Vehicle Manufacturers) [1] u Europi je 2017. godine prodano preko 20 milijuna novih vozila, a u Hrvatskoj je zabilježen uzastopni godišnji rast prodaje novih vozila od 2013. godine.
Vozila postaju sve veća jer proizvođači pokušavaju udovoljiti potrebama za udobnošću i sigurnošću vozača i putnika stoga postojeća parkirna mjesta više nisu pristupačna i dovoljno velika za parkiranje. U Hrvatskoj nema propisane standardne veličine parkirnog mjesta te se često mogu vidjeti mala i uska parkirna mjesta uz kolnik u centrima gradova gdje su vozači prisiljeni bočno parkirati sa smanjenim prostorom za manevriranje (primjer slika 1.). U takvim situacijama faktor ljudske pogreške je velik, vozač može pogrešno procijeniti mogućnost parkiranja na nekom parkirnom mjestu, svoje sposobnosti da se parkira na isto kao i utjecaj stresa kod vozača kojeg može izazvati sama radnja parkiranja na nepristupačno mjesto iz prometa u tijeku. Svi navedeni faktori mogu dovesti do oštećenja vozila i ugrožavanja sigurnosti vozača i ostalih sudionika u prometu.
Prepoznajući potrebe tržišta, 2003. godine Toyota je izašla na japansko tržište s prvim serijskim vozilom koje je imalo sustav za automatsko parkiranje vozila u modelu Prius.
2.
PREGLED SUVREMENIH SUSTAVA AUTOMATSKOG
PARKIRANJA
2.1.
Razvoj sustava za pomoć pri parkiranju
Potreba za sustavom za pomoć pri parkiranju pojavila se prije gužva na prometnicama i skučenih parkirnih mjesta, prvi oblik pomoći pri pakriranju pojavio se 1934. godine. Prema časopisu Popular Science [3], sustav se sastojao od četiri dizalice na kotačima, dvije s prednje strane vozila i dvije sa stražnje strane, koje bi podigle vozilo i pomicalo ga lijevo ili desno na odgovarajuće parkirno mjesto na koje bi se trebalo paralelno parkirati. Takav sustav nikad nije ušao u proizvodnju.
Slika 2. Isječak iz časopisa iz 1934. godine u kojem je opisan sustav pomoći pri parkiranju [3]
Tijekom desetljeća kako se tehnologija razvijala i postajala praktičnija i pristupačnija, rješenja za sustave za pomoć pri parkiranju postala su sofisticiranija i primjenjivija. Prvi oblik suvremenog sustava za kakve danas znamo razvijen je sredinom 1990-ih na Francuskom institutu za istraživanje računalnih znanosti i automatizacije u eksperimentalnom električnom vozilu francuskog proizvođača Ligier, slika 3. Paromtchik i Laugier su u svojim radovima [4] i [5] detaljno razradili algoritam prema kojem vozilo bez prisutnog vozača, pomoću senzora, kamera i računala ''uživo'' određuje svoju lokaciju, okoliš, parkirno mjesto na koje se treba parkirati i putanju kojom će se parkirati. Vozilo pomoću podataka dobivenih senzorima i kamerama stvara sliku okoliša i poziciju vozila u odnosnu na zadani koordinatni sustav i računa potrebnu putanju kojom se vozilo treba kretati kako bi se parkiralo na slobodno mjesto. Ovaj algoritam poslužio je kao baza velikim autoindustrijama u razvijanju vlastitih sustava pomoći pri parkiranju. Proizvođači poput Volkswagena i Volva 1990-ih i ranih
2000-ih godina razvili su koncepte tehnologije za automatsko parkiranje vozila, ali nisu bili korišteni u serijskoj proizvodnji.
2.2.
Automatizirani sustavi za parkiranje u serijskoj proizvodnji vozila
Toyota je 2003. godine prvi put izašla na japansko tržište sa serijskim vozilom Prius u kojem je bio ugrađen automatizirani sustav za parkiranje (engl. Intelligent Park Assist System), dalje u tekstu IPAS.
2006. godine, uz preinake sustav je ugrađen i u Lexus, model LS sedan, te 2009. godine i u modele Prius za svjetsko tržište. Prve verzije sustava su imale problema s prepoznavanjem pješaka, životinja i drugih prepreka te su bile predviđene samo za paralelno parkiranje. Ažuriranjem sustava dodane su mu mogućnosti prepoznavanja prepreka i označenih parkirnih mjesta kao i opciju pomoći pri parkiranju vožnjom unazad. IPAS se sastoji od računalnog procesora, sonara, kamere na stražnjem dijelu i dodatnih parkirnih senzora. Kada je IPAS aktiviran za paralelno parkiranje vozač se zaustavlja uz predviđeno parkirno mjesto, sustav proračunava putanju i kut upravljanja potreban za izvođenje parkiranja na predviđeno mjesto, tada se vozilo treba poravnati sa svojim stražnjim dijelom uz stražnje kotače vozila koje je parkirano ispred praznog parkirnog mjesta. Vozač sam odabire i potvrđuje parkiranje na parkirno mjesto te ga može promjeniti koristeći strelice na zaslonu. Promjenom na mjenjaču u vožnju unatrag aktivira se stražnja kamera koja je povezana s procesorom i projicira sliku na zaslon, tada vozilo počinje paralelno parkiranje vozila. Vozač je dužan provjeriti moguće prepreke te ima opciju prekinuti parkiranje pritiskom na pedalu kočnice ili dodirom upravljača.
Desetak godina kasnije, Toyotin sustav za parkiranje je i dalje baza i smjernica za razvijanje vlastitih sustava ostalim proizvođačima automobila. S vremenom kako se tehnologija razvijala i postajala pristupačnija cijenom tako su i automatizirani sustavi za parkiranje postali i pristupačniji za proizvodnju i prodaju uglavnom u dodatnoj opremi u automobilima srednje klase poput Volkswagenovog modela Polo i Golf ili Fordovog Focusa, sustavi nude i opciju pogleda iz ptičje perspektive gdje se pomoću kamera na vozilu kreira slika okoliša i na zaslonu prikazuje vozilo iz ptičje perspektive kako bi se vozaču olakšalo parkiranje na uskim i nepristupačnim mjestima. Na slici 5. prikazan je sustav za pomoć pri parkiranju vozila Kia Sportage iz 2016. godine. Pritiskom tipke sustav se aktivira te se brzina vožnje mora smanjiti na 30 km/h ili manje. Sustav preko informacija dobivenih preko senzora prepoznaje parkirno mjesto koje zadovoljava veličinom za parkiranje te vozača preko korisničkog sučelja obavještava o daljnim radnjama koje potrebno napraviti. Kada je vozilo prešlo udaljenost određenu sustavom, vozač zaustavlja vozilo i prebacuje u vožnju unatrag , a sustav kontrolira zakretanje kotača. Pritiskom na pedalu gasa vozač kontrolira kretanje vozila i dužan je provjeriti moguće prepreke. Kada je parkiranje gotovo, na korisničkom sučelju se prikazuje poruka.
Slika 5. Kia Sportage pomoć pri parkiranju [7]
2.3.
Autonomna vozila
BMW je 2016. godine u seriji 7 predstavio sustav koji osim funkcije da potpuno autonomno paralelno parkira vozilo bez da je vozač uopće u vozilu, može vozilom upravljati preko daljinskog upravljača na samom ključu vozila (slika 6.) dok je vozač izvan automobila, pri ograničenim brzinama.
U Sjedinjenim Američkim Državama, država Nevada 2011. godine prva je dozvolila testiranje potpuno autonomnih vozila na cestama. Do lipnja 2018. u 21 državi u SAD-u dozvoljeno je testiranje autonomnih vozila na javim cestama, u nekim državama dozvoljeno je samo s fizički prisutnom osobom (eng. safety driver) dok je u ostalim dozvoljeno daljinsko upravljanje kontrolirano od strane operatera [9].
U relativno kratkom razdoblju, tehnologija i pristup automatskim sustavima vožnje su se razvili od 2003. godine kada je Toyota predstavila IPAS koji je imao problema s prepoznavanjem pješaka i prepreka do 2018. godine gdje su sustavi toliko razvijeni da parkiraju vozila sama ili potpuno autonomno upravljaju njima u ''živom'' prometu. Može se zaključiti kako ćemo u bližoj budućnosti vidjeti sve više vozila s automatskim sustavima za parkiranje i vožnju po pristupačnijim cijenama s ciljem smanjivanja gužvi, potrošnje goriva i vjerojatnosti ljudske pogreške.
3.
KINEMATIČKA ANALIZA PARALELNOG PARKIRANJA
3.1.
Ackermannov princip zakretne geometrije
Kod upravljanja vozilom kinematika mora biti izvedena tako da se prilikom gibanja vozila kroz zavoj mora osigurati kotrljanje svih kotača sa što manje proklizavanja. Obzirom da se parkiranje izvodi pri malim brzinama primjenit će se Ackermannov princip zakretne geometrije. Kod vozila s pogonom prednjim kotačima prilikom prolaska kroz zavoj prednji unutarnji kotač zakreće se za veći kut u odnosu na prednji vanjski kotač osiguravajući vožnju prednjih kotača oko zajedničke osi O. Na slici 7. prikazano je vozilo pri ulasku u desni zavoj, odnosno početak paralelnog parkiranja u slučaju da je parkirno mjesto s desne strane vozila, iz geometrije proizlazi odnos između kuta zakreta unutarnjeg 𝛿𝑢 i vanjskog kotača 𝛿𝑣:
gdje su:
b – širina traga kotača, m l – međuosovinski razmak, m
𝛿𝑣 – kut zakreta vanjskog kotača, °
𝛿𝑢 – kut zakreta unutarnjeg kotača, °.
cot 𝛿𝑣− cot 𝛿𝑢 = 𝑏
𝑙, (3.1)
Razlika unutarnjeg i vanjskog kuta zakretanja kotača naziva se Ackermannov kut:
𝛿𝑢− 𝛿𝑣 = 𝛿𝐴, (3.2)
gdje je:
𝛿𝐴 - Ackermannov kut, °.
Na slici 7. označen je polumjer r zamišljene kružnice sa središtem u O po kojoj se giba vozilo, polumjer r je okomit na vektor brzine v u težištu T vozila. Ako se model vozila s dva traga kotača svede na model vozila s jednim tragom kotača kao na slici 8., može se postaviti sljedeća jednadžba 𝑟2 = 𝑙 2 2+ 𝑟 12, (3.3) gdje su:
𝑟 – polumjer zakretanja težišta vozila,m
𝑙2 – udaljenost težišta od stražnje osovine, m
𝑟1 – polumjer zakretanja stražnje osovine, m.
Kut zakretanja δ u modelu s jednim tragom može se izraziti kao:
cot 𝛿 = cot 𝛿𝑢+cot 𝛿𝑣
2 . (3.4)
Iz jednadžbi (3.3) i (3.4) može se izraziti polumjer r koji je ekvivalentan polumjeru za model vozila s dva traga kotača:
𝑟 = √𝑙22+ 𝑙2∙ cot2𝛿. (3.5)
Prilikom svakog gibanja vozila vrlo je važno odrediti odgovarajuću ''stazu'' kojom će se vozilo kretati tj. odrediti prostor koji je potreban vozilu da izvrši zadano gibanje, što je osobito bitno za zadatak s obzirom da se paralelno parkira uglavnom na skučenim i nepristupačnim mjestima, a bitno je i za algoritam kako bih mogao odrediti je li detektirano parkirno mjesto odgovarajuće za parkiranje odnosno može li se u danom prostoru izvesti zadano gibanje. Jazar je u svom radu [10] razradio problematiku odnosa širine traga kotača b i međuosovinskog razmaka l i kako utječe na stazu potrebnu za gibanje u zavoju. Što je omjer b/l manji tj. što je međuosovinski razmak l veći potreban je veći prostor za prolazak vozila kroz zavoj kao što je to slučaj kod kamiona i vozila s prikolicom. Kod vozila korištenog za ovaj zadatak omjer b/l je prilibližno 1,2÷3. Kako je prikazano na slici 9. vanjska prednja točka vozila oko osi rotacije O gibat će se po polumjeru 𝑅𝑚𝑎𝑥, a unutarnja stražnja po polumjeru 𝑅𝑚𝑖𝑛. Kod realnih vozila njihova ukupna duljina je veća od duljine međuosovinskog razmaka za neku veličinu a s prednje i za tu veličinu ili različitu sa stražnje strane (prednji odnosni stražnji prevjes), kao i širina vozila koja je veća od širine traga kotača b.
U proračunu će se pretpostaviti da je širina vozila jednaka širini kotača, a ukupna duljina vozila jednaka međuosovinskom razmaku: 𝑏𝑣 = 𝑏 i 𝑙𝑢𝑘𝑢𝑝𝑛𝑜 = 𝑙.
Kružni vijenac koji je potreban da vozilo izvede vožnju kroz zavoj je širine 𝛥𝑅, a razlika je između maksimalnog 𝑅𝑚𝑎𝑥 i minimalnog polumjera 𝑅𝑚𝑖𝑛. Iz geometrije prikazane na slici 9., maksimalni polumjer 𝑅𝑚𝑎𝑥 je
𝑅𝑚𝑎𝑥 = √(𝑅𝑚𝑖𝑛+ 𝑏)2 + (𝑙 + 𝑎)2, (3.6) gdje su:
𝑅𝑚𝑎𝑥 – maksimalni polumjer vanjske prednje točke vozila u gibanju kroz zavoj, m
𝑅𝑚𝑖𝑛 – minimalni polumjer unutarnje stražnje točke vozila u gibanju kroz zavoj, m
𝑎 – prednji prevjes, m.
Ako se jednadžba (3.6) uvrsti u definiciju kružnog vijenca 𝛥𝑅, izraz glasi:
𝛥𝑅 = 𝑅𝑚𝑎𝑥− 𝑅𝑚𝑖𝑛= √(𝑅𝑚𝑖𝑛+ 𝑏)2+ (𝑙 + 𝑎)2− 𝑅
Minimalni polumjer 𝑅𝑚𝑖𝑛 tada iznosi:
𝑅𝑚𝑖𝑛 = 𝑟1−1
2𝑏, (3.8)
Promotri li se trokut ΔO42 iz trigonometrije slijedi:
tan 𝛿𝑢 = 𝑙
𝑟1−12𝑏
, (3.9)
odnosno izraz za polumjer 𝑟1 glasi
𝑟1=tan 𝛿𝑙 𝑢+
1
2𝑏. (3.10)
Na jednak način polumjer 𝑟1može se izraziti iz odnosa u trokutu ΔO31:
tan 𝛿𝑣 = 𝑙 𝑟1+12𝑏 , 𝑟1 = 𝑙 tan 𝛿𝑣− 1 2𝑏. (3.11) Uvrste li se jednadžbe (3.10) i (3.11) u (3.8) tada se 𝑅𝑚𝑖𝑛 može izraziti pomoću 𝛿𝑢 ili 𝛿𝑣 kao
𝑅𝑚𝑖𝑛 = 𝑙 tan 𝛿𝑢 =
𝑙
tan 𝛿𝑣− 𝑏. (3.12)
Uvrštavanjem jednadžbe (3.12) u (3.7) dobije se konačan izraz za kružni vijenac 𝛥𝑅 = √( 𝑙 tan 𝛿𝑢+ 𝑏) 2 + (𝑙 + 𝑎)2− 𝑙 tan 𝛿𝑢, (3.13)
Jednadžba (3.14) vrijedi ako je točka A (slika 9.) najudaljenija točka od središta O u kretanju vozila kroz zavoj. Za velike otklone kotača i male prevjese a, točka G postaje najudaljenija točka stoga je bitno odrediti za koju veličinu kuta 𝛿𝑣 dolazi do tog slučaja.
Na slici 10. prikazana je geometrija na temelju koje se određuje prijelazni kut kotača 𝛿𝑣. Prema slici se može jasno vidjeti kako će točka G biti najudaljenija točka od središa O ako je
𝑟𝐺 > 𝑟𝐴.
Polumjer 𝑟𝐺 može se odrediti iz pravokutnog trokuta ΔOG1' : 𝑟𝐺 = √(𝑟𝑘1+ 1 2𝑤𝑡) 2 + 𝑟𝑡2, (3.15) gdje su:
𝑟𝐺 – polumjer zakretanja točke G, m,
𝑟𝑘1 – polumjer zakretanja kotača 1, m,
𝑤𝑡 – širina kotača, m,
𝑟𝑡 – polumjer kotača, m.
Polumjer zakretanja kotača 1 𝑟𝑘1 može se izraziti kao 𝑟𝑘1=
𝑙
sin 𝛿𝑣. (3.16)
Polumjer 𝑟𝐴 jednak je polumjeru 𝑅𝑚𝑎𝑥 u izrazu (3.6). Uvjet 𝑟𝐺 > 𝑟𝐴 glasi:
√( 𝑙 sin𝛿𝑣 +1 2𝑤𝑡) 2 +𝑟𝑡2> √(𝑟1+ 1 2𝑏) 2 + (𝑙 + 𝑎)2 (3.17)
Sređivanjem izraza (3.17) dobije se izraz za 𝛿𝑣 za koji G postaje najudaljenija točka od središta 𝛿𝑣 > sin−1( 𝑙 ). (3.18) 𝛥𝑅 = √( 𝑙 tan 𝛿𝑣) 2 + (𝑙 + 𝑎)2− 𝑙 tan 𝛿𝑣+ 𝑏. (3.14)
Slika 10. Geometrija prednjeg vanjskog kotača
3.2.
Trajektorija paralelnog parkiranja
Paralelno parkiranje može se podjeliti u tri različita segmenta gibanja (slika 11.): jedno pravocrtno i dva kružna. Za primjer se može uzeti paralelno parkiranje gdje je parkirno mjesto s desne strane. Vozilo se pravocrtno giba pokraj parkirnog mjesta u početni položaj za kružno gibanje, segment I na slici 11. Prvo se vozilo kreće po kružnici sa središtem u 𝑂1
(slika 12.), nakon što je vozilo prešlo duljinu kružnog luka od točke A do točke B, kotači se zakreću ulijevo te se vozilo počinje gibati po kružinici sa središtem u 𝑂2. Kada vozilo prijeđe luk duljine od točke B do točke C, vozilo je parkirano i gibanje prestaje. Položaji središta kružnica 𝑂1i 𝑂2 ovise o maksimalnom kutu zakretanja kotača vozila i različit je za svako vozilo, upravo maksimalni kut zakretanja kotača biti će kut zakreta kotača kojim će vozilo izvesti kružna gibanja 𝛿𝑚𝑎𝑥 = 𝛿𝑢.
Na slici 12. prikazana je osnovna geometrija parkiranja pomoću koje će algoritam planirati trajektoriju parkiranja, iz geometrije se mogu izraziti sljedeće jednadžbe:
𝑟1 = 𝑙 tan 𝛿𝑢1+ 1 2𝑏, (3.19) 𝑟2 = 𝑙 tan 𝛿𝑢2+ 1 2𝑏, (3.20) gdje su:
𝑟1 - polumjer prvog kružnog gibanja oko točke 𝑂1, m
𝑟2 – polumjer drugog kružnog gibanja oko točke 𝑂2, m
𝛿𝑢1 – kut zakreta unutarnjeg prednjeg kotača prvog kružnog gibanja, °
Promotri li se desni stražnji kotač na slici 12., od točke A do točke B gibat će se po polumjeru
𝑟𝑢1, a od točke B do C će se gibati po polumjeru 𝑟𝑣2, te polumjere možemo izraziti pomoću jednadžbi (3.19) i (3.20) kao: 𝑟𝑢1= 𝑙 tan 𝛿𝑢1= 𝑟1− 1 2𝑏, (3.21) 𝑟𝑣2= 𝑙 tan 𝛿𝑢2+ 𝑏 = 𝑟2 + 1 2𝑏, (3.22) gdje su:
𝑟𝑢1 – polumjer zakretanja desnog stražnjeg kotača u prvom kružnom gibanju, m
𝑟𝑣2 – polumjer zakretanja desnog stražnjeg kotača u drugom kružnom gibanju, m.
Duljina D je udaljenost početnog položaja stražnje osovine kotača do završnog položaja stražnje osovine kotača kako je prikazano na slici 12. i može se izraziti kao:
𝐷 = √(𝑂̅̅̅̅̅̅̅)1𝑂2 2− (2 ∙𝑟
𝑢1− 𝑋)2, (3.23)
𝐷 = √( 𝑟𝑢1+ 𝑟𝑣2)2− (2 ∙𝑟
𝑢1− 𝑋)2. (3.24)
Od točke A do točke B vozilo se kružno giba oko središta 𝑂1 za duljinu kružnog luka 𝑙𝐴𝐵, u točki B vozilo se zaustavlja i kotači se zakreću iz kuta 𝛿𝑢1 oko središta 𝑂1 u kut 𝛿𝑢2 oko središta 𝑂2 i vozilo se nastavlja gibati oko središta 𝑂2 za duljinu kružnog luka 𝑙𝐵𝐶, oba kružna luka imaju isti pripadni kut α koji se može izraziti kao
𝛼 = sin−1 𝐷
𝑂1𝑂2
̅̅̅̅̅̅̅, (3.25)
sada se mogu jasno definirati kružni lukovi 𝑙𝐴𝐵 i 𝑙𝐵𝐶 pomoću jednadžbi:
𝑙𝐴𝐵 = π ∙ 𝛼 180°∙ 𝑟𝑢1= π ∙ 𝛼 180°∙ (𝑟1− 1 2𝑏), (3.26) 𝑙𝐵𝐶 = π ∙ 𝛼 180°∙ 𝑟𝑣2 = π ∙ 𝛼 180°∙ (𝑟2+ 1 2𝑏). (3.27) gdje su:
𝑙𝐴𝐵 – duljina kružnog luka koju prijeđe desni stražnji kotač tijekom prvog kružnog gibanja, m
𝑙𝐵𝐶 – duljina kružnog luka koju prijeđe desni stražnji kotač tijekom drugog kružnog gibanja,m.
Promotre li se jednadžbe od (3.19) do (3.27) može se zaključiti da sve veličine ovise izravno o kutu zakretanja kotača 𝛿𝑚𝑎𝑥 = 𝛿𝑢 i dimenzijama samog vozila l i b.
3.3.
Minimalna veličina parkirnog mjesta
Prije samog parkiranja potrebno je odrediti je li parkirno mjesto na koje se želi parkirati vozilo pogodno za paralelno parkiranje, ono mora biti dovoljne duljine i širine što ovisi o veličini samog vozila. Tijekom ulaska na parkirno mjesto mora se voditi računa o ''stazi'' odnosno o slobodnom prostoru potrebnom vozilu za izvede zadano kružno gibanje, kako je već prikazano na slici 9. Kako bi se odredilo je li parkirno mjesto zadovoljavajuće veličine, potrebno je odrediti minimalnu duljinu i širinu parkirnog mjesta. Iz slike 13. može se vidjeti kako minimalna širina parkirnog mora biti jednaka ili veća od
𝑏𝑚𝑖𝑛 = 𝑏 + 𝑠. (3.28) Za realna vozila u jednadžbi (3.28) veličina b će biti jednaka ukupnoj širini vozila, a dalje u proračunu će se pretpostaviti da je ukupna širina jednaka širini traga kotača.
Minimalna duljina parkirnog mjesta proizlazi iz odnosa maksimalnog , 𝑅𝑚𝑎𝑥, i minimalnog polumjera, 𝑅𝑚𝑖𝑛, kojima će se vozilo gibati tj. o ''stazi''. Iz geometrije na slici 13. može se odrediti minimalna duljina parkirnog mjesta
𝐿𝑚𝑖𝑛 = √𝑅𝑚𝑎𝑥2− 𝑅𝑚𝑖𝑛2+ 2𝑠, (3.29)
gdje je s duljina ''sigurnosti'' i proizvoljne je veličine.
Duljina sigurnosti s potrebna je kako ne bi došlo do sudara vozila i prepreke, teoretski vozilo bi se moglo parkirati na parkirno mjesto minimalne duljine i širine bez uračunate veličine s dok je u praksi to gotovo nemoguće.
3.4.
Minimalni skup podataka
Postupak paralelnog parkiranja vozila određeno je skupinom podataka: podacima o vozilu i podacima koji su određeni senzorima na vozilu. Na slici 14. prikazano je prazno parkirno mjesto između dva već parkirana vozila. Podaci koji su određeni senzorom su: duljina parkirnog mjesta, L, širina parkirnog mjesta, 𝑏𝑝, i bočna udaljenost vozila i prepreke, X, u ovom slučaju parkiranog vozila.
Kako bi se vozilo moglo parkirati moraju biti zadovoljeni sljedeći uvjeti
𝐿 ≥ 𝐿𝑚𝑖𝑛, (3.30)
i
𝑏𝑝 ≥ 𝑏𝑚𝑖𝑛. (3.31)
Veličine L, X, s i 𝑏𝑝 zajedno s mjerama vozila l i b i maksimalnim kutem zakreta kotača 𝛿𝑚𝑎𝑥
čine minimalni skup podataka potrebnih za potpuno definiranje postupka paralelnog parkiranja.
4.
ALGORITAM PARALELNOG PARKIRANJA VOZILA
4.1.
Oprema za upravljanje vozilom i određivanje informacija iz okoliša
Svaki automatizirani sustav treba imati odgovarajuću opremu kako bi mogao primiti i obraditi potrebne podatke, te izvesti potrebne funkcije. Osnovni elementi koji su potrebni su senzori, aktuator i upravljačka jedinica.
Ultrazvučni senzori rade, kako im samo ime kaže, na principu ultrazvučnih valova; uređaj emitira ultrazvučne valove određene frenkvencije, oko 40 kHz, i na temelju vremena koje prođe dok se prvi val ne odbije od prepreke i vrati do uređaja izračunava udaljenost te prepreke od vozila prema formuli:
𝑙 =𝑡𝑒∙𝑣𝑧𝑣𝑢𝑘
2 , (4.1)
gdje je:
l – udaljenost predmeta od senzora, m
𝑡𝑒 – vrijeme potrebno da se prvi val vrati, s
𝑣𝑧𝑣𝑢𝑘 – brzina zvuka, 343 m/s.
Ultrazvučnim senzorima određuju se informacije iz okoliša, stvara se skup podataka o predmetima oko vozila, njihovim udaljenostima i položajima u odnosu na vozilo. Ultrazvučnim senzorima nije moguće detektirati sve prepreke, neki predmeti mogu biti premali ili takvog oblika da se valovi ne odbijaju od njih ili se odbiju pod drugačijim kutem tako da se odbijeni val ne vrati u senzor, također postoje materijali koji apsorbiraju ultrazvučne valove poput tekstila pa je nemoguće ultrazvukom detektirati takve objekte. Na ultrazvučne valove utječe i stanje okoliša poput vlage i temperature zraka, ali za ovaj zadatak taj utjecaj je zanemariv.
Aktuator je uređaj koji upravlja nekim strojnim dijelom ili mehanizmom. Aktuatori pretvaraju kontrolni signal iz upravljačke jedinice i ulaznu energiju u mehanički rad. S obzirom na vrstu energije postoji više vrsta aktuatora: električni, hidraulički, mehanički itd. Aktuator koji će se koristiti u ovom zadatku kontrolirati će kut zakreta kotača i gibanje vozila.
Upravljačka jedinica ili upravljački sklop (eng. Control unit) je dio središnje jedinice (eng. Central processing unit), ona povezuje naredbe programa i ostale logičke jedinice, pri tome programske naredbe ne izvršava upravljačka jedinica već šalje naredbe prema drugim logičkim jedinicama da one izvrše odgovarajuće naredbe programa.
Slika 15. Upravljačka jedinica
4.2.
Algoritam
Algoritam opisuje samo paralelno parkiranje i sve uvjete i radnje koje se trebaju izvesti prilikom parkiranja. Paralelno parkiranje opisano algoritmom izvodi se jednim pravocrtnim gibanjem i dva kružna gibanja tijekom kojih su kutevi zakreta kotača jednaki maksimalnom kutu zakreta kotača i konstantni za vrijeme gibanja, pod pretpostavkom da je vozilo u početnoj poziciji paralelno s preprekama. Na slici 16. je prikazan dijagram toka, početak označava početak paralelnog parkiranja tj. početak algoritma, kada se uključi automatsko parkiranje, a kraj označava izlaz iz algoritma u slučaju da parkirno mjesto ne zadovoljava veličinom ili u slučaju uspješnog parkriranja. Algoritam dobiva podatke o parkirnom mjestu određene senzorom, 𝐿 i 𝑏𝑝, zatim izračuna veličine 𝐷, 𝑙𝐴𝐵, 𝑙𝐵𝐶 i 𝑟𝑣2 prema jednadžbama (3.5), (3.24), (3.26) i (3.27) i provjerava je li detektirano parkirno mjesto odgovarajuće za parkiranje vozila. U tablici 1. su objašnjene sve oznake korištene u dijagramu toka. Nakon što je provjereno je li parkirno mjesto odgovarajuće, vozilo mora doći u početnu poziciju za početak parkiranja, 𝑃2, ako vozilo nije u poziciji 𝑃2,vozilo treba doći u poziciju vožnjom naprijed ili unatrag. Trenutna pozicija vozila 𝑇𝑃 određuje se u odnosu na koordinatni sustav, kao i sve ostale pozicije u algoritmu (slika 14.).
Tablica 1. Oznake i značenje korištene u dijagramu toka
OZNAKA ZNAČENJE
𝐿 Duljina parkirnog mjesta određena senzorom
𝑏𝑝 Širina parkirnog mjesta određena senzorom
𝑇𝑃 Trenutna pozicija vozila
𝑃1 Pozicija vozila u točki 𝑂2
𝑃2 Pozicija vozila kad je desni stražnji kotač u točki A (slika 12.) B Pozicija vozila kad je desni stražnji kotač u točki B (slika 12.)
Kada je vozilo u početnoj poziciji, kut zakreta kotača se mjenja iz položaja za pravocrtno gibanje do punog otklona kotača 𝛿𝑚𝑎𝑥 = 𝛿𝑢1, to je veličina koja ovisi o vozilu i ne treba je računati, kada je kut zakreta kotača namješten, vozilo se počinje kretati unatrag za duljinu kružnog luka 𝑙𝐴𝐵 dok ne dođe stražnjim desnim kotačem u točku B prema slici 12. Vozilo je sada u poziciji B, vozilo se zaustavlja i namješta kut zakreta kotača, 𝛿𝑢2, kada je kut namješten vozilo se nastavlja kretati unatrag sve dok ne dođe u poziciju C. Vozilo je u poziciji C, konačnoj poziciji parkiranja, vozilo se zaustavlja, ispravlja kotače i izlazi iz algoritma. Za vrijeme izvođenja cijelog algoritma provjerava se je li veličina sigurnosti s zadovoljena, ako je u nekom trenutku vozilo na udaljenosti manjoj od s od detektirane prepreke ili objekta, algoritam izlazi iz automatskog parkiranja. Ovaj jednostavni algoritam može se primjeniti za sva automatska paralelna parkiranja prilikom kojeg je predviđena trajektorija gibanja ista ili slična opisanoj u ovom zadatku i gdje je kut zakreta kotača 𝛿𝑢
5.
SIMULACIJA PARALELNOG PARKIRANJA U
MATLAB-u
U matematičkom programskom paketu Matlab (R2017b) napravljen je program za automatsko paralaleno parkiranje. Program se temelji na matematičkom modelu razrađenom u 3. poglavlju, a radi prema algoritmu u 4. poglavlju. Program prikazuje parkiranje pojednostavljene konstrukcije vozila, za ukupnu duljinu vozila pretpostavlja se da je jednaka međuosovinskom razmaku kao i za ukupnu širinu vozila da je jednaka širini traga kotača. Program radi s bezdimenzijskim veličinama. Pokretanjem programa od korisnika se zahtjeva da upiše ulazne vrijednosti o vozilu i parkirnom mjestu, 7 veličina koje čine minimalni skup podataka: l, b, 𝛿𝑚𝑎𝑥, L, 𝑏𝑝, X i s. Program zatim provjerava jesu li unesene vrijednosti parkirnog mjesta zadovoljavajuće veličine za parkiranje vozila željenih dimenzija. U slučaju da parkirno mjesto ne zadovoljava uvjete minimalne duljine i/ili širine, program vraća odgovarajuće poruke. Postoji 3 slučaja kada parkirno mjesto ne zadovoljava svojim dimenzijama:
a) 𝐿 < 𝐿𝑚𝑖𝑛 i 𝑏𝑝 ≥ 𝑏𝑚𝑖𝑛 b) 𝐿 ≥ 𝐿𝑚𝑖𝑛 i 𝑏𝑝 < 𝑏𝑚𝑖𝑛 c) 𝐿 < 𝐿𝑚𝑖𝑛 i 𝑏𝑝 < 𝑏𝑚𝑖𝑛
Za bilo koji od navedena tri slučaja, program se zaustavlja i vraća poruku koji uvjet nije zadovoljen i koja je minimalna vrijednost duljine i/ili širine za odabrano vozilo, primjeri poruka prikazani su na slici 17.
Slika 17. Izlazne poruke programa u slučaju odabira neodgovarajućeg parkirnog mjesta
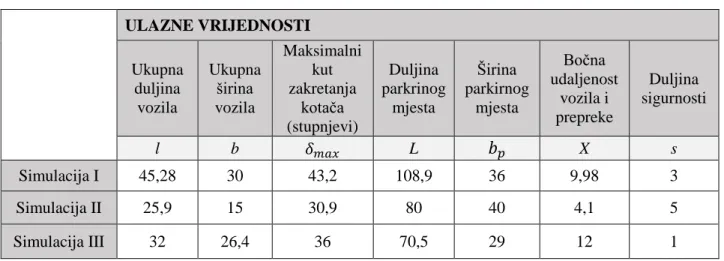
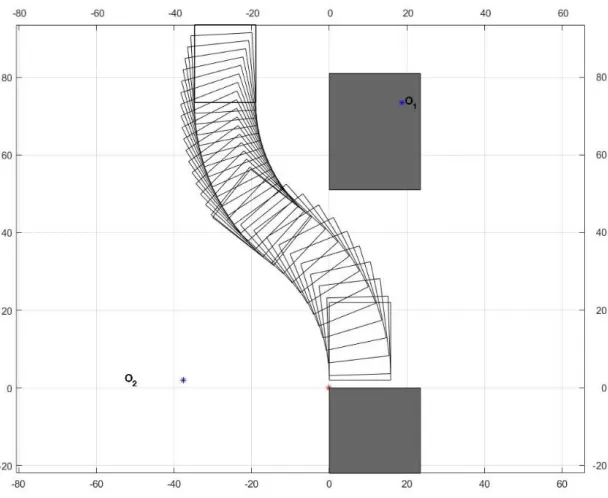
U slučaju kada ulazne vrijednosti parkirnog mjesta zadovoljavaju uvjete minimalne duljine i širine, program prikazuje simulaciju paralelnog parkiranja za vozilo zadanih dimenzija i maksimalnog kuta zakretanja kotača. Na slikama 18., 19. i 20. prikazani su primjeri izlazne simulacije za različite ulazne vrijednosti koje su prikazane u tablici 4., plave točke označavaju središta kružnice 𝑂1 i 𝑂2 ,središta rotacije vozila prvog i drugog kružnog
gibanja,a crvena točka označava ishodište koordinatnog sustava prema kojem se utvrđuje trenutna pozicija vozila.
Tablica 2. Ulazne vrijednosti programa
ULAZNE VRIJEDNOSTI Ukupna duljina vozila Ukupna širina vozila Maksimalni kut zakretanja kotača (stupnjevi) Duljina parkrinog mjesta Širina parkirnog mjesta Bočna udaljenost vozila i prepreke Duljina sigurnosti l b 𝛿𝑚𝑎𝑥 L 𝑏𝑝 X s Simulacija I 45,28 30 43,2 108,9 36 9,98 3 Simulacija II 25,9 15 30,9 80 40 4,1 5 Simulacija III 32 26,4 36 70,5 29 12 1 Slika 18. Simulacija I
Slika 19. Simulacija II
Programom i simulacijama se može provjeriti i prikazati paralelno parkiranje za vozilo pojednostavljene konstrukcije, proizvoljne veličine i kuta zakreta kotača na parkirno mjesto proizvoljne veličine. Program prikazuje vozilo u poziciji 𝑃2 (tablica 1.), nakon što je prešlo izračunatu duljinu D, te dva kružna gibanja za vrijeme kojih je kut zakretanja kotača konstantan tijekom gibanja i jednak maksimalnom kutu zakretanja kotač. Program prikazuje paralelno parkiranje vozila u slučaju kada je parkirno mjesto s desne strane.
6.
EKSPERIMENT S LEGO EV3 VOZILOM
6.1.
Lego EV3 model vozila
Model jednostavnog vozila izrađen je od Lego Technic i Lego Mindstorms EV3 dijelova. Lego Technic dijelovi korišteni su za izradu same konstrukcije vozila, dok su Lego Mindstorms EV3 dijelovi iz seta The Education EV3 Core Set (45544) korišteni za upravljanje vozilom i određivanje informacije iz okoliša. Prilikom izrade vozila korištena su dva pogonska motora za svaki stražnji kotač i jedan motor za pokretanje mehanizma za zakretanje prednjih kotača, dva ultrazvučna senzora smještena na prednjoj i desnoj bočnoj strani vozila kojima se određuje udaljenost prepreka ispred i pokraj vozila, i Lego EV3 Brick upravljačka jedinica (slika 21.).
Slika 21. Lego EV3 Brick upravljačka jedinica
U tablici 3. dani su podaci o izrađenom vozilu,, a model vozila prikazan je na slici 22.
Tablica 3. Podaci o Lego EV3 vozilu
Oznaka Iznos
Ukupna duljina vozila 𝑙𝑢𝑘𝑢𝑝𝑛𝑜 200 mm
Međuosovinski razmak 𝑙 155 mm
Ukupna širina vozila 𝑏𝑣 158 mm
Širina traga kotača 𝑏 135 mm
6.2.
Eksperiment
Eksperimentom će se testirati predloženi algoritam s Lego EV3 vozilom. Provest će se tri ispitivanja s različitim vrijednostima ulaznih podataka. U prva dva ispitivanja testirati će se paralelno parkiranje na parkirna mjesta čije su veličine veće od minimalnie potrebne veličine, a treće ispitivanje će se provesti parkiranje na parkirno mjesto čija je veličina jednaka minimalnoj potrebnoj veličini prema algoritmu.
Program za parkiranje vozila izrađen je u software-u LEGO MINDSTORMS EV3 Home Edition, a temelji se na predloženom matematičkom modelu, prikazan je na slici 23. Rezultati dobiveni eksperimentom usporediti će se sa simulacijama programa.
Kako bi se parkirno mjesto postavilo za eksperiment, potrebno je odabrati duljinu sigurnosti s i izračunati minimalnu duljinu i širinu parkirnog mjesta za vozilo prema jednadžbama (3.28) i (3.29), dobiveni podaci prikazani su u tablici 4.
Tablica 4. Minimalna veličina parkirnog mjesta
Duljina sigurnosti, s Minimalna duljina parkirnog mjesta, 𝐿𝑚𝑖𝑛 Minimalna širina parkirnog mjesta, 𝑏𝑚𝑖𝑛 Iznos (mm) 20 433 178
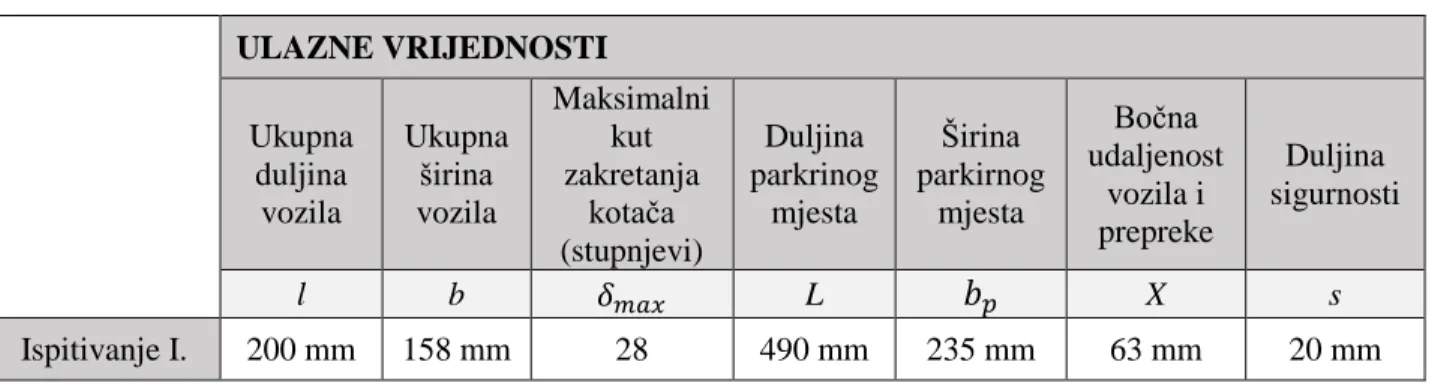
6.2.1. Ispitivanje I.
U prvom ispitivanju odabrano je parkirno mjesto duljine i širine veće od minimalne, u tablici 5. dani su ulazni podaci, a na slici 24. prikazano je vozilo tijekom ispitivanja. Crvene linije označavaju granice parkirnog mjesta i dio su samog mjesta. Kako je vidljivo sa slike, program vozila je na temelju ulaznih podataka izračunao potrebne veličine i uspješno se paralelno parkirao u granicama parkirnog mjesta.
Tablica 5. Ulazne vrijednosti – Ispitivanje I.
ULAZNE VRIJEDNOSTI Ukupna duljina vozila Ukupna širina vozila Maksimalni kut zakretanja kotača (stupnjevi) Duljina parkrinog mjesta Širina parkirnog mjesta Bočna udaljenost vozila i prepreke Duljina sigurnosti l b 𝛿𝑚𝑎𝑥 L 𝑏𝑝 X s Ispitivanje I. 200 mm 158 mm 28 490 mm 235 mm 63 mm 20 mm
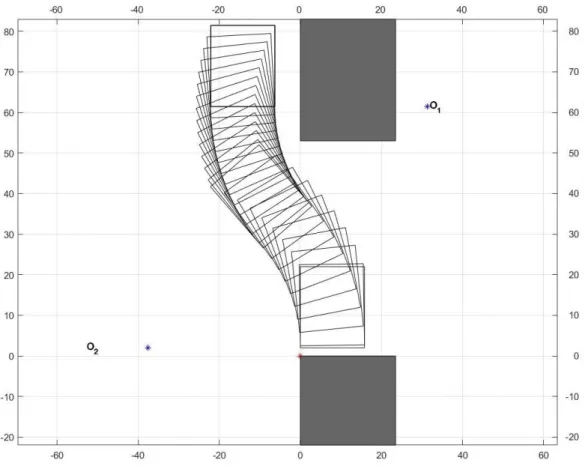
Slika 25. Simulacija – Ispitivanje I.
6.2.2. Ispitivanje II.
U drugom ispitivanju odabrano je parkirno mjesto koje je također veličinom veće od minimalnog, ali različitih ulaznih veličina od onog u Ispitivanju I. Ulazne veličine drugog ispitivanja dane su u tablici 6., a na slici 26. prikazano je vozilo tijekom ispitivanja. Kako je vidljivo sa slike, program vozila je na temelju ulaznih podataka izračunao potrebne veličine i uspješno se paralelno parkirao u granicama parkirnog mjesta.
Tablica 6. Ulazne vrijednosti – Ispitivanje II.
ULAZNE VRIJEDNOSTI Ukupna duljina vozila Ukupna širina vozila Maksimalni kut zakretanja kotača (stupnjevi) Duljina parkrinog mjesta Širina parkirnog mjesta Bočna udaljenost vozila i prepreke Duljina sigurnosti l b 𝛿𝑚𝑎𝑥 L 𝑏𝑝 X s Ispitivanje II. 200 mm 158 mm 28 470 mm 235 mm 189 mm 20 mm
Slika 27. Simulacija - Ispitivanje II.
6.2.3. Ispitivanje III.
Trećim ispitivanjem će se provjeriti parkiranje na mjestu čija je duljina i širina jednaka izračunatim minimalnim veličinama iz tablice 4. Ulazne veličine trećeg ispitivanja dane su u tablici 7., a na slici 28. prikazano je vozilo tijekom ispitivanja gdje je vidljivo kako se vozilo uspješno parkiralo na odabrano mjesto. Može se vidjeti kako je vozilo tijekom drugog kružnog gibanja prošlo vrlo blizu gornjoj prepreci, što je bilo i očekivano jer je parkirno mjesto minimalne duljine i širine.
Tablica 7. Ulazne vrijednosti – Ispitivanje III.
ULAZNE VRIJEDNOSTI Ukupna duljina vozila Ukupna širina vozila Maksimalni kut zakretanja kotača (stupnjevi) Duljina parkrinog mjesta Širina parkirnog mjesta Bočna udaljenost vozila i prepreke Duljina sigurnosti l b 𝛿𝑚𝑎𝑥 L 𝑏𝑝 X s Ispitivanje III. 200 mm 158 mm 28 433 mm 178 mm 121 mm 20 mm
Slika 29. Izlazna poruka programa – Ispitivanje III.
Kako je vidljivo na slici 29., unosom ulaznih vrijednosti za treće ispitivanje program je vratio poruku o neodgovarajućoj duljini parkirnog mjesta, a ispitivanjem je pokazano kako se vozilo uspješno parkiralo. Razlog tome je što program radi s pojednostavljenim modelom vozila gdje se za ukupnu duljinu podrazumijeva duljina međuosovinskog razmaka, a za ukupnu širinu vozila se podrazumijeva širina traga kotača. Kada se u program unesu vrijednosti međuosovinskog razmaka i širine traga kao ukupna duljina i širina vozila kotača Lego EV3 vozila tada program vraća simulaciju na slici 30.
Slika 30. Simulacija – Ispitivanje III.
6.3.
Usporedba rezultata
Nakon provedena 3 ispitivanja s različitim ulaznim vrijednostima, može se zaključiti kako je predloženi algoritam i matematički model ispravan, odstupanja ispitivanja i rezultata programa posljedica su pojednostavljivanja modela vozila u programu gdje se za ukupnu duljinu vozila pretpostavilo kako je jednaka međuosovinskom razmaku, i za ukupnu širinu vozila da je jednaka širini traga kotača. Program je stoga poželjno koristiti kao osnovu pri izradi matematičkog modela parkiranja, ne kao prikaz stvarnog stanja.
ZAKLJUČAK
Sustavi automatskog parkiranja ugrađuju se u sve veći broj vozila srednje klase, što pokazuje da je potreba za takvim sustavima sve veća kao i pristupačnost cijenom kao posljedicom razvoja tehnologije. U ovom radu je prikazan je algoritam bočnog parkiranja, kojim je opisano jednostavno gibanje, razrađena je kinematika gibanja temeljena na dostupnoj literaturi i napravljen matematički model. Matematički model testiran je simulacijom i ispitivanjima. Dokazana je ispravnost matematičkog modela simulacijom i eksperimentom. Eksperimentom je pokazano kako u stvarnosti gibanje odstupa od pretpostavljenog teoretskog gibanja, što je posljedica same konstrukcije vozila, mjerenja veličina, točnosti korištene opreme za određivanje informacija iz okoliša i opreme za upravljanje vozilom. Program napravljen u programsku paketu Matlab prikazuje parkiranje pojednostavljenog modela vozila te može služiti kao osnova za planiranje i prikaz paralelnog parkiranja, a uz preinake se može koristiti za prikaz gibanja vozila kroz zavoj ili nekog drugog gibanja vozila koje se temelji na razrađenoj kinematici.
LITERATURA
[1] International Organization of Motor Vehicle Manufacturers, podaci za 2017. godinu, http://www.oica.net/wp-content/uploads/Sales-all-vehicles-2017.pdf
[2] Zadarski list, https://www.zadarskilist.hr
[3] Časopis Popular Science, Rujan 1934., https://www.popsci.com/archives
[4] Igor E. Paromtchik and Christian Laugier, Motion Generation and Control for Parking an Autonomous Vehicle, Proceedings of the IEEE International Robotics and Automation, 1996. [5] Igor E. Paromtchik and Christian Laugier, Autonomous Parallel Parking of Nonhlonomic Vehicle, Proceedings of the IEEE Intelligent Vehicle Symposium, 1996.
[6] The Car Connection, https://www.thecarconnection.com [7] Kia of Newmarket, http://www.kiaofnewmarket.com [8] The Motor Life, https://www.themotorlife.com [9] National Conference of State Legislatures,
http://www.ncsl.org/research/transportation/autonomous-vehicles-self-driving-vehicles-enacted-legislation.aspx, objavljeno 25.6.2018.
[10] Reza N. Jazar, Vehicle Dynamics: Theory and Application, 2nd Edition, Springer, 2014. [11] Bosch, Electronic Automotive Handbook, 1st Edition, 2002.
[12] Matlab documentation, https://www.mathworks.com/help/matlab/ [13] Lego Mindstorms, https://www.lego.com/en-us/mindstorms