BAB II
LANDASAN TEORI
2.1 KONSEP ENERGI DAN DAYA LISTRIK
Energi listrik zaman kini telah menjadi salah satu kebutuhan hidup manusia yang paling penting. Energi listrik dapat dihasilkan dari sumber energi yang ada seperti air / PLTA (pembangkit listrik tenaga air), panas matahari/PLTS (pembangkit listrik tenaga surya), uap air / PLTU (pembangkit listrik tenaga uap), angin / PLTB (pembangkit listrik tenaga bayu). Manfaat yang diperoleh dari energi listrik tidak hanya sebagai pembangkit listrik, tetapi digunakan dalam berbagai aspek kehidupan dan di berbagai kalangan usia di setiap waktunya. Oleh karena itu, listrik telah menjadi kebutuhan yang paling banyak digunakan di dunia yang sudah tak terhitung banyaknya. Dalam kesehariannya, kita telah menggunakan listrik untuk menunjang segala aktivitas kita. Energi listrik mempunyai beberapa keuntungan dibanding energi yang lain diantaranya adalah:
a. Mudah diubah menjadi energi bentuk lain. b. Mudah ditransmisikan.
Energi listrik merupakan suatu bentuk energi yang berasal dari sumber arus. Energi listrik dapat diubah menjadi bentuk lain, misalnya:
a. Energi listrik menjadi energi kalor, contoh: setrika, solder dan kompor. b. Energi litrik menjadi energi cahaya, contoh: lampu.
c. Energi listrik menjadi energi mekanik, contoh: motor.
d. Energi listrik menjadi energi kimia, contoh: peristiwa pengisian accu, peristiwa penyepuhan (peristiwa melapisi logam dengan logam lain).
Membicarakan tentang kelistrikan pada dasarnya adalah membicarakan segala sesuatu yang menyangkut perpindahan elektron karena adanya impuls yang menyebabkannya. Pola berpindahnya elektron-elektron sehingga menimbulkan energi listrik serta upaya pengaplikasiannya di dalam berbagai penerapan adalah termasuk di dalamnya.
Teori tentang kelistrikan telah lama didefinisikan orang setelah banyaknya percobaan-percobaan yang dilakukan orang untuk memahami perilaku perpindahan elektron ini. Kesimpulan-kesimpulan pun telah ditetapkan dan kini telah menjadi baku sebagai dasar di dalam ilmu kelistrikan.
2.1.1 Tegangan Listrik atau Beda Potensial
Tegangan biasa disebut juga beda potensial. Menurut Kamus Fisika, beda potensial adalah perbedaan potensial antara dua titik, yang sama
dengan perubahan energi, saat satu satuan muatan positif bergerak dari satu tempat ke tempat lain dalam medan listrik. Satuan beda potensial adalah volt (V). Arus listrik mengalir dari potensial tinggi ke potensial rendah, sedangkan elektron mengalir dari potensial rendah ke potensial tinggi. Tegangan 1 (satu) volt ialah tegangan yang dapat mengalirkan arus satu ampere melalui tahanan satu ohm.
2.1.2 Arus listrik
Arus listrik adalah mengalirnya elektron secara kontinyu pada konduktor akibat perbedaan jumlah elektron pada beberapa lokasi yang jumlah elektronnya tidak sama. Satuan arus listrik adalah ampere. 1 (satu) ampere adalah mengalirnya elektron sebanyak 628 x 1016 tau sama dengan 1 Coulumb per detik melewati suatu penampang konduktor.
2.1.3 Kuat Arus Listrik
Kuat arus litrik adalah arus yang tergantung pada banyak sedikitnya elektron bebas yang pindah melewati suatu penampang kawat dalam satuan waktu. Rumus untuk menghitung banyaknya muatan listrik, kuat arus dan waktu adalah sebagai berikut:
Dimana:
I = Kuat arus dalam satuan Ampere (A)
Q = Banyaknya muatan listrik dalam satuan Coulomb (C) t = Waktu dalam satuan detik (s)
2.1.4 Hubungan antara Tegangan Listrik (V) dan Kuat Arus Listrik (I)
Hubungan antara beda potensial dan kuat arus listrik pertama kali di temukan oleh seorang guru fisika dari Jerman yang bernama George Simon Ohm. Teorinya lebih kita kenal dengan nama hukun Ohm yang berbunyi: “ Besar kuat arus listrik dalam satu penghantar berbanding langsung dengan beda potensial antara ujung-ujung penghantar asalkan suhu penghantar tetap”. Hasil bagi antara beda potensial (V) dengan kuat arus (I) dinamakan hambatan listrik atau resistansi (R) dengan satuan ohm (Ω). Maka persamaannya dapat ditulis sebagai berikut:
𝑅 =
𝑉𝐼...………(2.2)
AtauV= I . R
...………(2.3)Atau
Dimana:
R = Hambatan listrik dalam satuan Ohm (Ω)
V = Beda potensial atau tegangan dalam satuan Volt (V) I = Kuat arus listrik dalam satuan Ampere (A)
2.1.5 Energi Listrik
Energi listrik adalah energi yang diperlukan untuk memindahkan muatan dari titik yang berpotensial tinggi ke titik yang berpotensial rendah. Berdasarkan percobaan James Joule, energi panas yang dihasilkan energi listrik berbanding lurus dengan beda potensial, kuat arus dan lama waktu mengalir. Sehingga dalam rangkaian listrik, besarnya energi listrik dapat dirumuskan sebagai berikut :
𝑊 = 𝑉. 𝐼. 𝑡
...………(2.5)
Dimana:W = Energi listrik dalam satuan Joule
I = Kuat arus listrik dalam satuan Ampere (A) t = Waktu dalam satuan detik (s)
Satuan energi listrik adalah joule dan bila hendak diubah dalam kalori, maka kita dapat menggunakan konversi 1 joule = 0,24 kalori.
Berdasarkan hukum ohm sesuai pernyataan (2.3) , maka persamaan diatas juga dapat dituliskan sebagai berikut:
𝑊 = 𝐼
2. 𝑅. 𝑡
...………(2.6)
2.1.6 Daya Listrik
Besar daya listrik pada suatu alat listrik adalah merupakan besar energi listrik (W) yang muncul tiap satuan waktu (t), maka dapat kita tuliskan:
𝑃 =
𝑊𝑡
atau
𝑊 = 𝑃. 𝑡
………(2.7)
Dengan satuan P adalah Joule per detik atau Watt. Jika nilai W pada persamaan (2.5) kita subtitusikan pada persamaan diatas maka kita dapatkan nilai daya listrik adalah sebagai berikut:
𝑃 = 𝑉. 𝐼 = 𝐼2
. 𝑡 =
𝑉2𝑅
………(2.8)
Dimana:
P = Daya listrik dalam satuan Watt
V = Beda potensial atau tegangan dalam satuan Volt (V) I = Kuat arus listrik dalam satuan Ampere (A)
t = Waktu dalam satuan detik (s)
Satuan daya listrik adalah watt (W), atau juga dapat juga di sebut volt ampere (VA). Dari satuan daya tersebut maka maka munculah satuan energi lain yang dipakai untuk menghitung pemakaian energi selama 1 (satu) jam yaitu kilowatt jam atau kilowatt-hour (kWh), sesuai dengan persamaan (2.7).
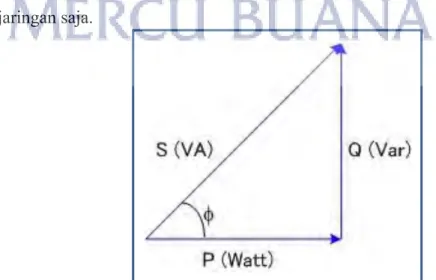
2.1.7 Hubungan Faktor Daya dengan Daya Aktif, Daya Buta dan Daya Reaktif
Istilah faktor daya atau power factor (PF) merupakan istilah yang sering sekali dipakai di bidang-bidang yang berkaitan dengan pembangkitan dan penyaluran energi listrik. Faktor daya listrik atau umumnya disebut juga coshinus phi. ( cos φ ) adalah perbandingan antara daya aktif dengan daya buta. Dapat dirumuskan sebagai berikut :
𝑃𝐹 = 𝐶𝑜𝑠 Ҩ =
𝑃𝑆………....………(2.9)
Dimana:P = Daya aktif dalam satuan Watt S = Daya buta dalam satuan VA
Beberapa istilah listrik yang perlu diketahui yang erat kaitannya dengan faktor daya listrik antara lain :
a) Daya aktif
Adalah daya yang timbul akibat mengalirnya arus listrik melalui hambatan atau resistor seperti lampu pijar, elemen pemanas atau heater. Daya ini dipergunakan untuk melakukan kerja atau dengan kata lain daya yang benar-benar digunakan sesuai dengan kebutuhan tenaga listrik. Satuan dari daya aktif ini adalah Watt atau kilo Watt. Dapat dituliskan dengan persamaan berikut :
𝑃 = 𝐸. 𝐼. 𝐶𝑜𝑠 Ҩ …
………(2.10)b) Daya buta
Adalah hasil perkalian antara arus dan tegangan listrik pada suatu beban. Satuan dari daya buta ini adalah volt ampere (VA). Dapat dituliskan dengan persamaan berikut :
𝑆 = 𝐸. 𝐼
..………...………(2.11)c) Daya reaktif
Adalah daya yang secara elektrik bisa diukur, secara vektor merupakan penjumlahan dari vektor E x I dimana arus mengalir pada komponen resistor sehingga arah vektornya searah dengan tegangan dan vektor yang arah 90o terhadap tegangan, tergantung pada beban induktif atau kapasitif. Satuan dari daya buta ini adalah
volt ampere reaktif (VAR). Dapat dituliskan dengan persamaan berikut :
𝑄 = 𝐸. 𝐼. 𝑆𝑖𝑛 Ҩ
..………(2.12)Ilustrasi segitiga daya pada Gambar 3 memberikan gambaran yang lebih jelas. Daya buta (S) terdiri dari daya aktif (P) dan daya reaktif (Q). Antara S dan P dipisahkan oleh sudut phi, yang merupakan sudut yang sama dengan sudut phi antara tegangan dan arus yang telah disebutkan di awal. Rasio antara P dengan S tidak lain adalah nilai cosinus dari sudut phi. Apabila kita berusaha untuk membuat sudut phi semakin kecil maka S akan semakin mendekat ke P artinya besarnya P akan mendekati besarnya S. Pada kasus ekstrim dimana phi = 00, cos phi=1, S=P artinya semua daya tampak yang diberikan sumber dapat kita manfaatkan sebagai daya aktif, sebaliknya phi = 90o, cos phi=0, S=Q artinya semua daya tampak yang diberikan sumber tidak dapat kita manfaatkan dan menjadi daya reaktif di jaringan saja.
2.2 PENGUKURAN BESARAN LISTRIK 2.2.1 Pengukuran dan Jenis Data
Pengukuran adalah proses untuk mendapatkan informasi besaran fisis tertentu, seperti tegangan (V), arus listrik (I), hambatan (R) dan lainnya. Informasi yang diperoleh dapat berupa nilai dalam bentuk angka (kuantitatif) maupun berupa pernyataan yang merupakan sebuah simpulan (kualitatif). Informasi yang diperoleh dalam suatu pengukuran disebut data. Sesuai dengan sifat pengukuran maka data dapat dibagi menjadi dua jenis, yaitu sebagai berikut:
a) Data Kualitatif
Dengan data ini maka informasi yang diperoleh berupa sebuah pernyataan simpulan, misalnya “nilai kuantitas suhu dari sensor LM35 dapat dirubah menjadi sinyal digital menggunakan ADC”. b) Data Kuantitatif
Bila informasi yang diperoleh dalam pengukuran berupa nilai/angka maka data itu disebut data kuantitatif, misalnya sebuah pengukuran tegangan diperoleh nilai 10 ± 1 volt.
Data yang didapat dari hasil pengukuran juga dapat di golongkan menjadi dua jenis yaitu:
a) Data Empiris
Data ini diperoleh langsung saat dilakukan pengukuran (apa yang terbaca pada alat ukur). Data empiris sering disebut juga data mentah karena belum diproses lebih lanjut. Tegangan yang terbaca pada voltmeter, misalnya adalah termasuk data empiris.
b) Data Terproses (Processed Data)
Data ini diperoleh setelah dilakukan pengolahan tertentu, misalnya melalui sebuah perhitungan. Sebagai contoh jika diukur tegangan V dan arus I maka hambatan R = V/I setelah dihitung hasilnya disebut data terproses. Data tipe ini biasanya diperoleh dari proses reduksi data.
Berkaitan dengan data di atas maka setelah data terkumpul dari hasil suatu pengukuran selanjutnya dilakukan proses perhitungan-perhitungan matematik atau dilakukan penyusunan ulang data-data. Proses / prosedur ini disebut reduksi data atau pengolahan data.
2.2.2 Ralat (Error) dan Ketidakpastian (Uncertainty)
Secara konsep pengukuran, baik karena keterbatasan alat ukur maupun karena kondisi lingkungan maka dipercaya bahwa setiap pengukuran akan selalu menghasilkan hasil ukur yang tidak semestinya (sebenarnya). Dalam hal ini diasumsikan hasil benar tersebut tidak
diketahui. Simpangan atau selisih (difference) antara hasil ukur (hasil pengamatan) dan hasil yang sebenarnya dinyatakan sebagai ralat (error).
Dalam mengukur tegangan misalnya, hasilnya dinyatakan dengan 1,5 <V< 1,6 volt atau V = (1,4 ± 0,1) volt. Nilai benar pengukuran tentu saja berada di dalam rentang hasil pengukuran ini. Oleh karena sebuah rentang nilai pengukuran sekaligus menyatakan ketidakpastian
(uncertainty) hasil ukur maka pengertian ralat sering tidak dibedakan
dengan pengertian ketidakpastian untuk menunjukkan deviasi pengukuran terhadap nilai benar. Sebagai contoh, sebuah pengukuran tegangan dituliskan hasilnya dengan V = (10,5 ± 0,5) volt, artinya alat ukur kita menunjukkan hasil baca 10,5 volt (dengan ketidakpastian/ralat pengukuran 0,5 volt, sedangkan nilai benar kita berada dalam selang nilai (10,5 - 0,5 = 10,0 ) volt sampai dengan (10,5 + 0,5 = 11,0) volt.
2.3 MIKROKONTROLER ARDUINO
Mikrokontroler arduino merupakan salah satu board mikrokontroler yang sangat populer dan sudah diakui keunggulannya. Kemudahan dalam pemrograman, harganya relative murah, software dan hardware-nya yang bersifat open source menjadikan mikrokontroler ini palingbanyak digunakan di dunia.
Arduino hardware dan Integrated Development Environment (IDE) yang menggunakan bahasa pemograman C++, arduino dikembangkan di
Ivrea, Italia pada tahun 2005, dengan tujuan untuk membuat sebuah perangkat yang membantu siswa membuat perangkat desain dan interaksi dengan harga yang lebih murah dibandingkan dengan proto type yang tersedia pada saat itu. Pada mei 2011, sudah terjual lebih dari 300.000 unit arduino.
Arduino ditemukan oleh Massimo Banzidan David Cuartielles, dan dinamakan sebagai Arduin of Ivrea, tapi kemudian didiganti dengan Arduino yang dalam bahasa italia berarti teman yang berani. Arduino dikembangkan dari thesis Hernando Barragan di desain interaksi Institute Ivrea, arduino dapat menerima masukan dari berbagai macam sensor dan juga dapat mengontrol lampu, motor dan actuator lainnya. Mikrokontroler pada papan arduino diprogram dengan menggunakan bahasa pemograman arduino (based on wiring) dan IDE arduino (based on processing). Proyek ardunio dapat berjalan sendiri atau juga bisa berkomunikasi dengan software yang berjalan pada komputer, kita juga bisa mengembangkan perangkat arduino sendiri karena skematik dari arduino juga dibagikan secara gratis. Arduino menerima penghargaan “Digital Communities” pada tahun 2006
Komponen utama didalam papan Arduino adalah sebuah
mikrokontroler 8 bit dengan merk Atmega yang dibuat oleh perusahaan
Atmel Corporation. Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega 328, sedangkan Arduino Mega yang
mempunyai kapasitas memori program dan Input Output baik digital maupun ADC lebih banyak menggunakan ATmega 2560.
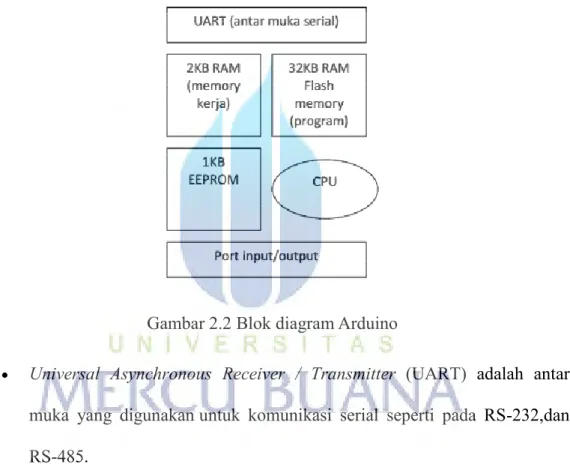
Untuk memberikan gambaran mengenai apa saja yang terdapat didalam sebuah micro controller, pada gambar berikut ini diperlihatkan contoh diagram blok sederhana dari mikrokontroler Arduino.
Gambar 2.2 Blok diagram Arduino
Universal Asynchronous Receiver / Transmitter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232,dan RS-485.
SDRAM pada memori kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel didalam program.
RAM flash memory bersifat non-volatile, digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memory juga menyimpan bootloader. Bootloader adalah program inisiasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah
bootloader selesai dijalankan, berikutnya program di dalam RAM akan
dieksekusi.
EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papan Arduino ( namun bisa diakses/diprogram oleh pemakai dan digunakan sesuai kebutuhan).
Central Processing Unit (CPU), bagian dari mikrokontroler untuk menjalankan setiap instruksi dari program.
Port input / output, pin-pin untuk menerima data (input) digital atau
analog, dan mengeluarkan data (output) digital atau analog.
Saat ini Ada beberapa jenis board Arduino. Beberapa berpenampilan sangat berbeda, sementara lainnya terlihat seperti board elektronik biasa. Arduino Diecimila Arduino Duemilanove Arduino UNO Arduino Leonardo Arduino Mega Arduino Nano Arduino Mini LilyPad Arduino
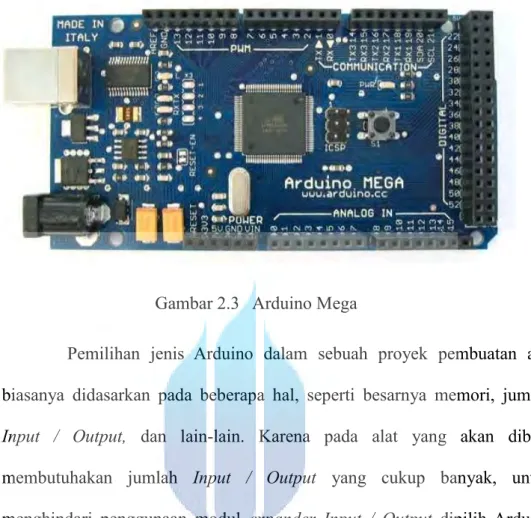
Gambar 2.3 Arduino Mega
Pemilihan jenis Arduino dalam sebuah proyek pembuatan alat biasanya didasarkan pada beberapa hal, seperti besarnya memori, jumlah
Input / Output, dan lain-lain. Karena pada alat yang akan dibuat
membutuhakan jumlah Input / Output yang cukup banyak, untuk menghindari penggunaan modul expander Input / Output dipilih Arduino Mega 2560.
Arduino Mega menggunakan IC ATmega 2560, memiliki 54 digital
Input / Output pin, dimana 14 pindapat digunakan sebagai output PWM, 16
analog input, 4 UART (hardware serial port), osilator16 MHz kristal, koneksi USB, jack DC Power Supply, header ICSP, dan tombol reset.
Tabel 2.1 Tabel Spesifikasi Arduino Mega 2560
No Uraian Spesifikasi
1 Operating Voltage 5V
2 Input Voltage 7 – 12 V
3 Input Voltage (Limit) 6 – 20 V
4 Digital I/O pin 54 pin
5 Analog Input pin 16 pin
6 DC Current per I/O pin 40 mA
7 DC Current for 3.3V pin 50 mA
8 Flash Memory 256 kB
9 SRAM 8 kB
10 EEPROM 4 kB
11 Clock Speed 16 MHz
2.3.1 Sketch
Sketch adalah lembar kerja pada system arduino yang digunakan
untuk menulis listing program, mengeditnya, mengcompile dan kemudian mengupload ke dalam mikrokontroller arduino tersebut. Sketch Arduino terdiri dari bagian-bagian seperti comments, Setup (), dan Loop (). Dibawah ini akan dijelaskan secara lebih detail mengenai bagian-bagian tersebut.
2.3.1.1 Comments
Biasanya komentar digunakan untuk memudahkan bagi orang-orang membaca kode yang telah ditulis oleh engineer, untuk menjelaskan tujuan dari dibuatnya program ini, cara kerjanya, atau mengapa program tersebut ditulis seperti itu. Dibawah adalah contoh Comments :
/* * Blink
* The basic Arduino example. Turns on an LED on for one second,
* then off for one second, and so on... We use pin 13 because, * depending on your Arduino board, it has either a built-in LED * or a built-in resistor so that you need only an LED.
* http://www.arduino.cc/en/Tutorial/Blink
*/
Adalah sesuatu yang baik untuk memberikan komentar atas sketch, salah satunya adalah untuk membantu ketika adanya kode yang ingin diperbaiki serta hal ini dapat membantu orang lain untuk belajar dari atau memodifikasi kode yang sudah berjalan. Ada comments dengan bentuk lain, yaitu single-line. Comments ini dimulai dengan “ // “ dan lanjut hingga ke akhir baris. Sebagai contohnya adalah :
Kalimat yang berisi pesan ini "LED connected to digital pin 13" adalah sebuah comments yang digunakan untuk menjelaskan mengenai variable 13
2.3.1.2 Fungsi Setup ()
Ada beberapa fungsi khusus yang merupakan bagian dari sketch yaitu “ Setup () “. Fungsi Setup () dipanggil sekali, yaitu ketika sketsa dimulai. Fungsi ini merupakan tempat yang baik untuk melakukan pengaturan-pengaturan seperti :
• Pengaturan mode output pada pin digital • Inisialisasi library mikrokontroler arduino • Inisialisasi Variabel, dan lain-lain
Fungsi setup hanya akan berjalan sekali, setelah setiap PowerUp atau setelah tombol reset pada rangkaian modul Arduino ditekan. Berikut adalah contoh dari fungsi setup () :
void setup() {
Serial.begin(9600);
pinMode(buttonPin, INPUT); }
2.3.1.3 Fungsi Loop ()
Fungsi Loop () adalah fungsi utama dalam sketch arduino ini. Fungsi ini dipanggil berulang kali oleh modul mikrokontroller untuk menjalankan program yang telah tersimpan di dalamnya. Berikut adalah contoh penggunaan dari fungsi Loop () :
void loop() { if (digitalRead(buttonPin) == HIGH) serialWrite('H'); else serialWrite('L'); delay(1000); }
Fungsi loop () sesuai dengan namanya, melakukan perulangan setiap listing program yang dituliskan, yang pada saat tertentu variable dari program anda telah berubah sehingga sistem merespon dan menghasilkan
2.3.2 Fitur-fitur Mikrokontroller Arduino Mega
Berikut ini adalah Fitur-fitur dari perangkat keras mikrokontroller Arduino. Perangkat keras ini dapat diprogram dengan mudah pada sketch. Ada beberapa fitur-fitur perangkat keras yang dapat ditemukan pada modul mikrokontroller arduino, berikut adalah penjelasan dari fitru-fitur tersebut :
2.3.2.1 Pin Digital
I/O Port pada modul mikrokontroller Arduino dikenal dengan Pin Digital. Pin ini dapat dikonfigurasi baik sebagai input ataupun dapat digunakan sebagai output.
2.3.2.1.1 Karakteristik pin digital ketika menjadi input
Arduino dengan chipsnya Atmega, secara default pengaturan
port digital adalah pengaturan untuk port masukan, sehingga mereka
tidak perlu secara eksplisit dinyatakan sebagai input dengan pinMode (). Pin dikonfigurasi sebagai input sehingga pin tersebut berada dalam keadaan impedansi tinggi. Salah satu penjelasannya adalah pin input akan mengambil daya yang sangat kecil sekali pada rangkaian ketika dalam kondisi pengambilan sampel, dapat dikatakan bahwa ada resistor seri dari 100 Megaohm di depan pin tersebut. Hal ini berarti bahwa hanya sangat sedikit arus yang digunakan untuk memindahkan kondisi
ini dapat membuat pin berguna untuk melakukan tugas-tugas seperti membaca sensor sentuh kapasitif, membaca sebuah LED sebagai dioda, atau membaca sebuah sensor analog dengan skema seperti RCTime. Akan tetapi hal ini juga berarti, apabila ada pin input yang tidak terhubung ke rangkaian, akan menghasilkan beberapa keadaaan seperti akan berlogika acak, menghasilkan noise, atau akan menjadi kapasitor
coupling pada pin yang berdekatan dengan Pin tersebut.
Adalah hal yang berguna untuk mengarahkan pin masukan ke keadaan yang dikenal jika tidak ada input. Hal ini dapat dilakukan dengan menambahkan resistor pullup (ke +5 V), atau resistor pull-down (resistor ke tanah) pada input, dengan resistor 10 Kohm. Ada juga resistor pullup 20 KOhm yang dapat di akses pada chip Atmega dengan perangkat lunak. Berikut ini adalah cara untuk mengakses resistor pullup built-in.
pinMode(pin, INPUT); // set pin to input
digitalWrite(pin, HIGH); // turn on pullup resistors
2.3.2.1.2 Karakteristik pin digital ketika menjadi Output
Apabila Pin digital ini dikonfigurasi sebagai OUTPUT dengan pinMode (), maka Pin ini akan berada dalam keadaan impedansi rendah. Hal ini berarti bahwa mereka dapat menyediakan sejumlah besar arus ke rangkaian lainnya. Pin Atmega dapat menjadi sumber arus positif
atau menjadi sumber arus negatif hingga 40 mA (milliamps) arus ke perangkat lain. Hal ini cukup untuk menghidupkan sebuah LED, menjalankan banyak sensor, namun sayangnya saat ini tidak cukup untuk menjalankan relay, solenoida, atau motor.
Hubungan pendek pada pin Arduino, atau mencoba untuk menjalankan rangkaian dengan arus yang besar, dapat merusak atau menghancurkan transistor output pada pin, atau merusak chip Atmega keseluruhan. Sering kali ini akan menghasilkan sebuah pin "mati" dalam mikrokontroler akan tetapi chip yang tersisa masih akan berfungsi secara memadai. Maka untuk alasan ini, adalah sebuah ide yang baik untuk menghubungkan pin OUTPUT ke perangkat lain dengan resistor 470 Ohm atau 1 KOhm.
2.3.2.2 Pin Input Analog
Sebagian besar port Arduino (Atmega) adalah pin analog yang dapat dikonfigurasi dan digunakan persis dengan cara yang sama seperti pin digital. Berikut ini adalah karakteristik dari Pin Analog.
2.3.2.2.1 A/D Converter
Chips Atmega digunakan pada Arduino memiliki 6 saluran analog-ke-digital converter (ADC). ADC tersebut memiliki 10 bit
Arduino adalah untuk membaca sensor analog. pin analog juga memiliki semua fungsi General Purposes input / output (GPIO) pin (sama dengan pin digital 0-13).
2.3.2.2.2 Pemetaan Pin
Pin analog dapat digunakan sama seperti pin digital, menggunakan penamaan A0 (untuk input analog 0), A1, dll Sebagai contoh, kode berikut digunakan untuk mengatur 0 pin analog ke output, dan mengaturnya berlogika “High” :
pinMode(A0, OUTPUT); digitalWrite(A0, HIGH);
2.3.2.2.3 Pull up Resistor
Pin yang analog juga memiliki resistor pullup, yang bekerja sama seperti resistor pullup pada pin digital. Mereka diaktifkan dengan mengeluarkan perintah seperti dibawah ini :
digitalWrite(A0, HIGH); // set pullup on analog pin 0
Namun harus disadari bahwa mengatur Resistor Pull up akan mempengaruhi nilai yang akan diambil oleh analogRead (). Hal tersebut dikarenakan Perintah analogRead tidak akan bekerja dengan benar jika pin sebelumnya di gunakan sebagai output, akan tetapi
apabila hal ini terjadi maka pin tersebut harus di atur kembali menjadi masukan sebelum menggunakan perintah analogRead. Hal yang sama pula harus diterapkan jika pin telah diatur untuk menjadi logika “High” sebagai output, resistor pullup harus diatur ketika beralih kembali ke input.
2.3.2.3 PWM ( Pulse Width Modulator )
Pulse Width Modulation, atau PWM, adalah teknik untuk
mendapatkan hasil yang analog dengan teknik digital. Digital kontrol digunakan untuk membuat gelombang persegi, dan kemudian sinyal diatur sehingga beralih antara hidup dan mati secara cepat. Pola on-off ini dapat mensimulasikan tegangan Hidup (5 Volt) dan off (0 Volt) dengan mengubah sebagian waktu sinyal Hidup dengan waktu pada sinyal mati. Lamanya "on time" disebut lebar pulsa. Untuk mendapatkan berbagai nilai analog, pengguna akan mengubah, atau memodulasi, yang lebar pulsa. Jika pengguna mengulangi pola on-off ini dengan cukup cepat dan menggunakan LED misalnya sebagai output, maka hasilnya adalah pengendalian kecerahan LED.
Dalam grafik di bawah, garis-garis hijau merupakan periode waktu yang teratur. Ini adalah durasi atau periode yang merupakan kebalikan dari frekuensi PWM. Dengan kata lain, dengan frekuensi PWM Arduino di sekitar 500Hz, garis hijau hanya akan teratur selama 2 milidetik saja.
Fungsi untuk analogWrite () memiliki nilai skala dari 0 – 255. Ketika
analogWrite memiliki (255) maka siklus akan 100% (selalu high), dan analogWrite (127) adalah siklus kerja 50% (High pada separuh waktu
dan low pada separuh waktu).
Gambar 2.4 PWM Mikrokontroller Arduino
2.3.2.4 Memory
Ada tiga jenis memori dalam mikrokontroler yang digunakan pada moArduino (ATmega168) sebagai berikut:
Flash memory adalah tempat dimana listing program (sketch)
Arduino disimpan.
SRAM adalah di mana listing program (sketch) Arduino menciptakan dan memanipulasi variabel ketika berjalan sketch tersebut dijalankan.
EEPROM adalah ruang memori untuk menyimpan informasi jangka panjang.
Flash memori dan EEPROM adalah non-volatile (informasi tetap ada setelah power dimatikan). Sedangkan SRAM adalah volatile dan akan hilang saat tidak adanya power supply. Chip ATmega168 memiliki kapasitas memori sebagai berikut :
Flash 16k bytes (of which 2k is used for the bootloader) SRAM 1024 bytes
EEPROM 512 byte
2.3.3 Teknik Memprogram Mikrokontroler
Berikut adalah konsep dalam memprogram modul mikrokontroler arduino uno :
2.3.3.1 Variabel
int pin = 13;
Perintah ini menciptakan variabel yang namanya pin, yang nilainya adalah 13, dan bertipe int. apabila user membutuhkan variable ini, maka akan dapat menunjuk ke variabel ini dengan memanggil namanya. pada saat itu variable ini nilainya akan dicari dan digunakan. seperti dalam pernyataan ini:
pinMode(pin, OUTPUT);
Nilai dari pin (13) ini akan diteruskan ke perintah pinMode (). Dalam hal ini, sebenarnya user tidak perlu menggunakan variabel, pernyataan ini akan bekerja dengan baik sama seperti :
pinMode(13, OUTPUT);
Keuntungan dari penggunaan variabel dalam hal ini adalah bahwa
user hanya perlu menentukan jumlah pin yang digunakan sekali, akan
tetapi user dapat menggunakannya berkali-kali. sehingga jika user kemudian memutuskan untuk mengubah penggunaan dari pin 13 menjadi pin 12, user hanya perlu mengubah sedikit kode. user juga dapat menggunakan nama pengenal untuk membuat pentingnya variabel yang jelas (misalnya program mengendalikan LED RGB memungkinkan penamaan variabel redPin, greenPin, dan bluePin. Sebuah variabel memiliki kelebihan lain atas nilai seperti mengubah nilai dari variabel menggunakan perintah Sebagai contoh:
Perintah ini akan mengubah nilai dari variabel menjadi 12. Perhatikan bahwa user tidak menentukan jenis variable, hal tersebut tidak diubah oleh perintah tersebut. Artinya, nama variabel secara permanen diasosiasikan dengan jenis, user hanya melakukan perubahan nilainya. user harus mendeklarasikan variabel sebelum user memberikan nilai untuk itu. Jika tidak maka pesan error ini akan muncul "error: pin was
not declared in this scope".
Bila user menetapkan satu variabel yang lain, user membuat salinan nilai variable tersebut dan menyimpan salinannya pada lokasi di memori yang terkait dengan variabel lain. Hanya variable pin yang memiliki nilai 12, sedangkan untuk variable PIN2 memiliki nilai 13. Hal ini mengacu pada bagian dari listing program user di mana variabel tersebut digunakan. Sebagai contoh, jika user ingin dapat menggunakan variabel mana saja dalam programnya, maka user dapat menyatakan di bagian atas listing programnya. Ini disebut variabel global, berikut adalah contohnya: int pin = 13; void setup() { pinMode(pin, OUTPUT); }
{
digitalWrite(pin, HIGH);
}
Seperti yang terlihat, pin yang digunakan di kedua setup () dan loop () fungsi. Kedua fungsi mengacu pada variabel yang sama, sehingga perubahan itu satu akan mempengaruhi nilai yang telah di yang lain, seperti di bawah ini :
int pin = 13; void setup() { pin = 12; pinMode(pin, OUTPUT); } void loop() { digitalWrite(pin, HIGH); }
Di sini, digitalWrite () fungsi yang dipanggil dari loop () akan melewati nilai 12, karena itu nilai yang ditugaskan ke variabel di setup () fungsi. Jika user hanya perlu menggunakan variabel dalam sebuah
perintah tunggal, user dapat menyatakan variable tersebut di Setup (), sehingga ruang lingkup variable tersebut akan terbatas pada perintah tersebut. Sebagai contoh :
void setup() { int pin = 13; pinMode(pin, OUTPUT); digitalWrite(pin, HIGH); }
Dalam perintah ini, pin variabel hanya dapat digunakan dalam setup () fungsi. Jika user mencoba untuk melakukan sesuatu seperti ini:
void loop() {
digitalWrite(pin, LOW); // wrong: pin is not in scope here.
}
User akan mendapatkan pesan yang sama seperti
sebelumnya"error: pin was not declared in this scope". Hal ini berarti meskipun user telah menyatakan variable pin dalam program, user mencoba untuk menggunakan suatu variabel di luar jangkauannya. Hal ini berarti jika sebuah variabel bersifat global, nilainya bisa diubah di
memahami keseluruhan program untuk mengetahui apa yang akan terjadi pada variabel. Misalnya, jika variabel user memiliki nilai yang tidak Anda harapkan, akan lebih mudah untuk mencari tahu di mana nilai tersebut berasal dari jika variabel memiliki ruang lingkup terbatas.
2.3.3.2 Fungsi-Fungsi
Segmentasi program ke fungsi memungkinkan programmer untuk membuat potongan-potongan program yang melakukan tugas yang telah didefinisikan sebelumnya dan kemudian kembali ke awal program dimana fungsi itu dipanggil. Menciptakan sebuah fungsi sangat berguna ketika salah satu kebutuhan untuk melakukan tindakan yang sama beberapa kali dalam sebuah program.
Untuk programer yang terbiasa menggunakan BASIC, fungsi dalam Arduino memberikan (dan memperluas) kegunaan menggunakan subrutin (gosub dalam BASIC). Menstandarisasikan program ke fungsi memiliki beberapa keuntungan yaitu membantu programmer tetap terorganisir yang seringkali hal ini membantu pada awal konsep program. Fungsi juga mengelompokan satu tindakan dalam satu tempat sehingga fungsi hanya harus dipikirkan dan debugged sekali. Hal ini juga mengurangi kemungkinan untuk kesalahan dalam modifikasi, jika ada listing program yang perlu diubah. Fungsi juga membuat sketsa keseluruhan menjadi lebih kecil dan lebih kompak karena hanya bagian
kode tertentu saja yang digunakan kembali berkali-kali. Fungsi membuat lebih mudah untuk menggunakan kembali kode dalam program lain dengan membuatnya lebih modular, dan sebagai efek sampingnya, menggunakan fungsi juga sering membuat program lebih mudah dibaca.
Ada dua fungsi yang diperlukan dalam sketsa Arduino, setup () dan
loop (). Fungsi lainnya harus dibuat di luar kurung dari dua fungsi.
Sebagai contoh, dibawah ini adalah fungsi sederhana untuk mengalikan dua angka. void setup(){ Serial.begin(9600); } void loop() { int i = 2; int j = 3; int k;
k = myMultiplyFunction(i, j); // k now contains 6 Serial.println(k);
delay(500); }
int result; result = x * y; return result;
}
2.3.3.3 Library-Library
Sebuah Kelas hanyalah sebuah kumpulan fungsi dan variabel yang semua berada di satu tempat. Fungsi-fungsi dan variabel dapat bersifat publik, yang berarti bahwa mereka dapat diakses oleh orang yang menggunakan library user, atau Private yang berarti mereka hanya dapat diakses dari dalam kelas itu sendiri. Setiap kelas memiliki fungsi khusus yang dikenal sebagai konstruktor, yang digunakan untuk membuat sebuah instance dari kelas. Konstruktor ini memiliki nama yang sama dengan kelas, dan tidak ada jenis kembali.
Library menyediakan fungsionalitas tambahan untuk digunakan
dalam sketch, misalnya menggunakan perangkat keras atau memanipulasi data. Untuk menggunakan perpustakaan di sketch, pilih Sketch> Impor
Library Menu. Hal ini akan memasukkan satu atau lebih pernyataan #
include di bagian atas sketch dan akan mengcompile sketch user dengan
Library. Karena library masuk ke sketch user hal ini menyebabkan
tidak lagi membutuhkan library, cukup hapus pernyataannya # include dari atas sketch.
Ada banyak library yang sudah ada di dalam perangkat lunak arduino, Dan beberapa dapat diunduh dari berbagai sumber. Library dapat ditemukan dalam folder khusus, dan biasanya akan berisi sedikitnya dua file dengan akhiran h dan satu dengan akhiran cpp.
2.4 ETHERNET SHIELD
Ethernet shield merupakan sebuah shield Ethernet mikrokontroler
Arduino. Ethernet shield ini merupakan sarana pengembangan TCP/IP berbasi modul jaringan W5200 yang berfungsi sebagai jembatan antara mikrokontroler dengan jaringan internet atau Ethernet tanpa memerlukan bantuan komputer. Ethernet shield ini cocok untuk aplikasi-aplikasi
embedded yang membutuhkan komunikasi dengan jaringan internet atau
Ethernet, seperti serial to Ethernet converter, web server, smart house, dsb.
Ethernet shield adalah sebuah shield modul jaringan yang
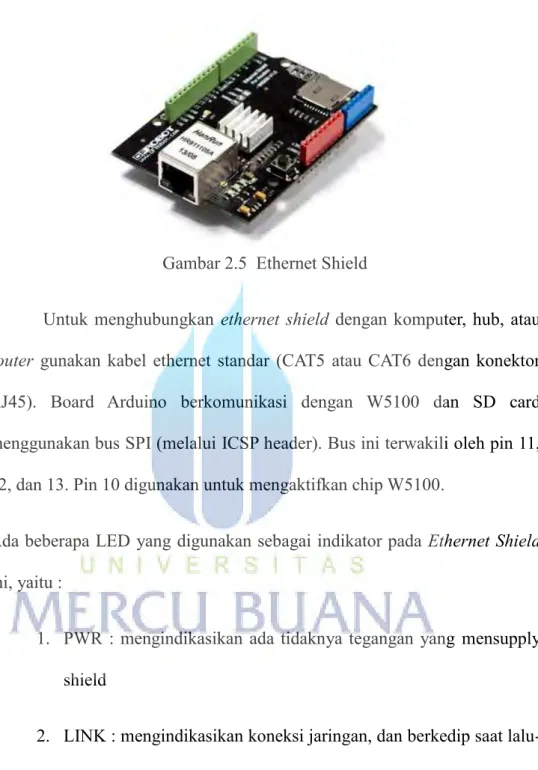
menyertakan chip w5200 (TCP/IP hardware chip), Ethernet PHY (IP101A), dan MAG-Jack (RJ45 dengan X’FMR). Modul ini merupakan pilihan tepat dan murah jika ingin membangun system berbasis internet, Gambar dibawah ini menampilkan modul Ethernet shield.
Gambar 2.5 Ethernet Shield
Untuk menghubungkan ethernet shield dengan komputer, hub, atau
router gunakan kabel ethernet standar (CAT5 atau CAT6 dengan konektor
RJ45). Board Arduino berkomunikasi dengan W5100 dan SD card menggunakan bus SPI (melalui ICSP header). Bus ini terwakili oleh pin 11, 12, dan 13. Pin 10 digunakan untuk mengaktifkan chip W5100.
Ada beberapa LED yang digunakan sebagai indikator pada Ethernet Shield ini, yaitu :
1. PWR : mengindikasikan ada tidaknya tegangan yang mensupply shield
2. LINK : mengindikasikan koneksi jaringan, dan berkedip saat lalu-lintas data
3. FULLD : mengindikasikan bahwa koneksi jaringan merupakan full duplex
5. RX : berkedip ketika shield menerima data
6. TX : berkedip ketika shield mengirim data
7. COLL : berkedip ketika network collisions terdeteksi
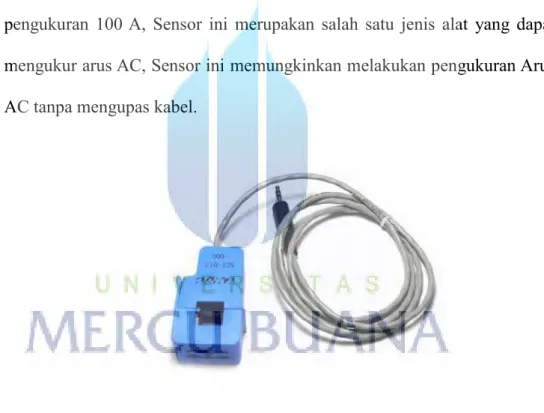
2.5 SENSOR ARUS SCT 013-00
Merupakan sebuah alat sensor arus non-invansive dengan maksimum pengukuran 100 A, Sensor ini merupakan salah satu jenis alat yang dapat mengukur arus AC, Sensor ini memungkinkan melakukan pengukuran Arus AC tanpa mengupas kabel.
Gambar 2.6 Sensor Arus STC013-000
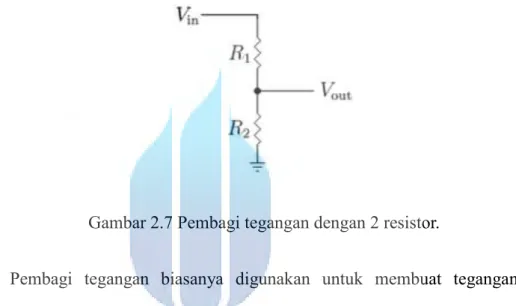
2.6 PEMBAGI TEGANGAN
Dalam elektronik, pembagi tegangan (juga dikenal sebagai pembagi potensial) adalah sebuah rangkaian elektronika linear yang akan
menghasilkan tegangan output (Vout) yang merupakan sebagian kecil dari tegangan masukan (Vin). Pembagi tegangan biasanya menggunakan dua resistor atau dibuat dengan satu potensiometer. Tegangan output tergantung dari nilai-nilai komponen resistor atau dari pengaturan potentiometer. Ketika pembagi tegangan diambil dari titik tengah, tegangan mungkin kebetulan.
Gambar 2.7 Pembagi tegangan dengan 2 resistor.
Pembagi tegangan biasanya digunakan untuk membuat tegangan referensi, atau untuk mendapatkan sinyal tegangan rendah sebanding dengan tegangan yang akan diukur, dan juga dapat digunakan sebagai attenuator sinyal pada frekuensi rendah. Untuk arus DC dan berfrekuensi rendah pembagi tegangan cukup akurat jika dibuat hanya dari 2 resistor, dimana respon frekuensi dengan bandwidth yang lebar sangat diperlukan (seperti dalam probe osiloskop), pembagi tegangan memiliki elemen kapasitif yang dapat ditambahkan untuk dapat memberikan kompensasi pada kapasitansi beban. Dalam transmisi tenaga listrik, tegangan kapasitif pembagi digunakan untuk pengukuran tegangan tinggi. Ada beberapa macam pembagi tegangan yang biasa digunakan yaitu :
1. Pembagi tegangan sifat Resistif (menggunakan komponen elemen resistansi murni).
2. Pembagi tegangan sifat campuran Resistif-Capasitansi (menggunakan komponen elemen resistif digabung dengan komponen elemen penyimpan muatan, contohnya adalah filter RC).
3. Pembagi tegangan sifat campuran Resistif-Induktif (menggunakan komponen elemen resistif digabung dengan komponen elemen penghasil GGL, contohnya adalah filter RL).
4. Pembagi tegangan sifat campuran Resistif-Capasitif-Induktif (menggunakan komponen elemen resistif digabung dengan komponen elemen penghasil GGL dan dengan komponen elemen penyimpan muatan, contohnya adalah filter RLC).
2.7 RTC (REAL TIME CLOCK)
Real Time Clock berhubungan dengan waktu mulai dari detik, menit,
jam, hari, tanggal, bulan dan tahun. Tetapi IC RTC ini juga bisa dipakai untuk menyimpan data di dalam internal RAM RTC ini, di mana data tersebut tidak bisa hilang meskipun sumber diputus, hal ini karena di dalam IC RTC tersebut ada battery-nya yang selalu hidup untuk menjalankan clock-nya jadi waktu (clock) tetap berjalan meskipun sumber dimatikan. IC RTC ini masih mempunyai kelebihan bisa dipakai sebagai timer atau alarm.
Untuk hitungan detik, menit, jam, hari, tanggal, bulan dan tahun dengan tahun kabisat yang valid sampai 2100 karena compensation valid up to 2100. Mode yang dipilih juga bisa 12 or 24 hour clock with AM dan PM in 12 hour mode.
RTC 1307 menggunakan teknik I2C yaitu memakai 2 jalur untuk keperluan transfer data secara seri, sedangkan SPI dan MicroWire memakai 3 jalur. Semua teknik mempunyai 1 jalur untuk Clock, I2C hanya punya satu jalur data 2 arah, sedangkan SPI dan MicroWire mempunyai 2 jalur data satu arah, masing-masing untuk jalur data masuk dan jalur data keluar. Komunikasi dengan protokol I2C pada RTC 1307 mempunyai cara yang sama seperti mengakses eeprom serial tipe 24C04 misalnya. Pertama kirim start-bit, alamat RTC(0xC0) dengan bit R/W low, kemudian nomor register yang ingin diakses.
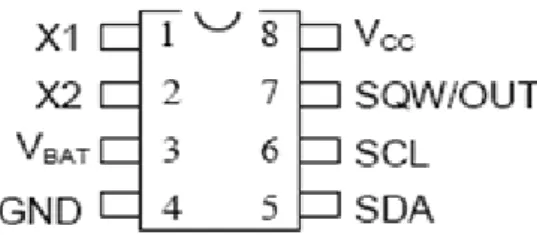
Untuk lebih jelas mengenai fungsi dan kegunaan dari IC ini terlebih dahulu akan dijelaskan fungsi dari tiap-tiap pin pada IC keluarga DS1307, di mana diketahui bahwa IC DS1307 memiliki 8 pin atau kaki, seperti pada Gambar 1.
Fungsi dari tiap pin RTC DS1307 antara lain : 1. X1, X2
Terhubung dengan kaki kristal 32768kHz 2. Vbat
Terhubung dengan battery 3,3 volt 3. GND, Vcc
Input tegangan Vcc adalah +5V. 4. SQW (Square Wave Output)
Pin SQW dapat mengeluarkan sinyal salah satu dari 13 taps yang disediakan oleh 15 tingkat pembagi internal dari RTC.
5. SCL
Pin SCL mengeluarkan sinyal clock. Pin ini harus diberi resistor Pull Up.
6. SDA
Pin SCL mengeluarkan sinyal data
2.8 ANDROID STUDIO
Android Studio adalah sebuah IDE untuk Android Development yang diperkenalkan google pada acara Google I/O 2013. Android Studio
Java populer, yaitu IntelliJ IDEA. Android Studio merupakan IDE resmi untuk pengembangan aplikasi Android.
Sebagai pengembangan dari Eclipse, Android Studio mempunyai banyak fitur-fitur baru dibandingkan dengan Eclipse IDE. Berbeda dengan Eclipse yang menggunakan Ant, Android Studio menggunakan Gradle sebagai build environment. Fitur-fitur lainnya adalah sebagai berikut :
1. Menggunakan Gradle-based build system yang fleksibel. 2. Bisa mem-build multiple APK .
3. Template support untuk Google Services dan berbagai macam tipe perangkat.
4. Layout editor yang lebih bagus.
5. Built-in support untuk Google Cloud Platform, sehingga mudah untuk integrasi dengan Google Cloud Messaging dan App Engine. 6. Import library langsung dari Maven repository