TUGAS AKHIR - TE 141599
MENENTUKAN CRITICAL CLEARING TIME (CCT)
MENGGUNAKAN KOMBINASI METODE BISEKSI DAN
TIME DOMAIN SIMULATION (TDS) PADA ANALISIS
STABILITAS TRANSIEN SISTEM TRANSMISI JAMALI 500
KV AKIBAT GANGGUAN HUBUNG SINGKAT DI GITET
KRIAN
Yuangga Danataswara NRP 07111645000020 Dosen Pembimbing
Prof. Dr. Ir. Adi Soeprijanto, MT. Dr. Eng. Ardyono Priyadi, ST., M.Eng. DEPARTEMEN TEKNIK ELEKTRO Fakultas Teknologi Elektro
Institut Teknologi Sepuluh Nopember Surabaya 2018
TUGAS AKHIR - TE 141599
MENENTUKAN CRITICAL CLEARING TIME (CCT)
MENGGUNAKAN KOMBINASI METODE BISEKSI DAN
TIME DOMAIN SIMULATION (TDS) PADA ANALISIS
STABILITAS TRANSIEN SISTEM TRANSMISI JAMALI
500 KV AKIBAT GANGGUAN HUBUNG SINGKAT DI
GITET KRIAN
Yuangga Danataswara NRP 07111645000020 Dosen Pembimbing
Prof. Dr. Ir. Adi Soeprijanto, MT. Dr. Eng. Ardyono Priyadi, ST., M.Eng. DEPARTEMEN TEKNIK ELEKTRO Fakultas Teknologi Elektro
Institut Teknologi Sepuluh Nopember Surabaya 2018
FINAL PROJECT - TE 141599
DETERMINING CRITICAL CLEARING TIME (CCT)
USING COMBINATION OF BISECTION METHOD AND
TIME DOMAIN SIMULATION (TDS) AT TRANSIENT
STABILITY ANALYSIS 500 KV TRANSMITION SYSTEM
OF JAMALI BECAUSE OF SHORT CIRCUIT IN GITET
KRIAN
Yuangga Danataswara NRP 07111645000020 Advisor
Prof. Dr. Ir. Adi Soeprijanto, MT. Dr. Eng. Ardyono Priyadi, ST., M.Eng. DEPARTMENT OF ELECTRICAL ENGINEERING Faculty of Electrical Technology
Sepuluh Nopember Institute of Technology Surabaya 2018
v
PERNYATAAN KEASLIAN
TUGAS AKHIR
Dengan ini saya menyatakan bahwa isi sebagian maupun keseluruhan Tugas Akhir saya dengan judul “Menentukan Critical
Clearing Time (CCT) Menggunakan Kombinasi Metode Biseksi Dan Time Domain Simulation (TDS) Pada Analisis Stabilitas Transien
Sistem Transmisi Jamali 500 Kv Akibat Gangguan Hubung Singkat Di GITET Krian” adalah benar benar hasil karya intelektual mandiri, diselesaikan tanpa menggunakan bahan-bahan yang tidak diijinkan dan bukan merupakan karya pihak lain yang saya akui sebagai karya sendiri.
Semua referensi yang dikutip maupun dirujuk telah ditulis secara lengkap pada daftar pustaka.
Apabila ternyata pernyataan ini tidak benar, saya bersedia menerima sanksi sesuai peraturan yang berlaku.
Surabaya, 25 Juni 2018
Yuangga Danataswara Nrp. 07111645000020
vi
vii
MENENTUKAN CRITICAL CLEARING TIME (CCT)
MENGGUNAKAN KOMBINASI METODE BISEKSI
DAN TIME DOMAIN SIMULATION (TDS) PADA
ANALISIS STABILITAS TRANSIEN SISTEM
TRANSMISI JAMALI 500 KV AKIBAT GANGGUAN
HUBUNG SINGKAT DI GITET KRIAN
TUGAS AKHIR
Diajukan Untuk Memenuhi Sebagian Persyaratan Untuk Memperoleh Gelar Sarjana Teknik
Pada
Bidang Studi Teknik Sistem Tenaga Departemen Teknik Elektro Institut Teknologi Sepuluh Nopember
Menyetujui :
Dosen Pembimbing I
Prof. Dr. Ir. Adi Soeprijanto, M.T. NIP. 196404051990021001
Dosen Pembimbing II
Dr. Eng. Ardyono Priyadi, S.T., M.Eng. NIP. 197309271998031004
SURABAYA JULI, 2018
viii
ix
MENENTUKAN CRITICAL CLEARING TIME (CCT)
MENGGUNAKAN KOMBINASI METODE BISEKSI DAN
TIME DOMAIN SIMULATION (TDS) PADA ANALISIS
STABILITAS TRANSIEN SISTEM TRANSMISI JAMALI
500 KV AKIBAT GANGGUAN HUBUNG SINGKAT DI
GITET KRIAN
Nama : Yuangga Danataswara
NRP : 07111645000020
Dosen Pembimbing 1 :Prof. Dr. Ir. Adi Soeprijanto, MT. Dosen Pembimbing 2 : Dr. Eng. Ardyono Priyadi, ST., M.Eng.
ABSTRAK
Kestabilan adalah hal yang utama dalam sistem tenaga listrik. Ada banyak penyebab yang mempengaruhi kestabilan yaitu adanya gangguan hubung singkat yang besar seperti hubung singkat tiga fasa. Sistem transmisi Jawa–Madura–Bali (Jamali) merupakan contoh sistem multi mesin (multi machine) dengan banyak generator pembangkit yang saling terhubung dan bersinkronasi, maka kestabilan harus tetap terjaga. Dalam menjaga kestabilan pada sistem transmisi Jamali 500 kV yang bebannya semakin bertambah, PT. PLN (Persero) melakukan penambahan kapasitas pembangkit sekitar 39.1 GW dan penambahan beberapa GITET baru. Pada tugas akhir ini dilakukan analisis kestabilan transien (transien
stability) dengan memberikan gangguan hubung singkat (short circuit) 3
fasa pada GITET Krian dan diasumsikan terjadi didekat bus Krian kemudian dilakukan analisis kestabilan transien. GITET Krian dipilih karena merupakan GITET terbaru dan mempunyai beban tertinggi diantara GITET baru lainnya. Dilakukan analisis Load Flow dan kestabilan transien menggunakan software Matlab. Untuk menentukan
Critical Clearing Time (CCT) dilakukan dengan menggunakan kombinasi
dua metode, yaitu Metode Biseksi (Bisection Method) dan Time Domain Simulation (TDS), dan didapatkan hasil yaitu mempersingkat waktu pencarian CCT secara otomatis dan sistematis dengan nilai yang akurat.
Kata Kunci : Transien Stability, Multi Machine, Laod Flow, Short
Circuit, Critical Clearing Time, Bisection Method, Time Domain Simolation.
x
xi
DETERMINING CRITICAL CLEARING TIME (CCT) USING
COMBINATION OF BISECTION METHOD AND TIME
DOMAIN SIMULATION (TDS) AT TRANSIENT STABILITY
ANALYSIS 500 KV TRANSMITION SYSTEM OF JAMALI
BECAUSE OF SHORT CIRCUIT IN GITET KRIAN
Name : Yuangga Danataswara
NRP : 07111645000020
Advisor I : Prof. Dr. Ir. Adi Soeprijanto, MT.
Advisor II : Dr. Eng. Ardyono Priyadi, ST., M.Eng.
ABSTRACT
Stability is the main thing in electric power systems. There are many causes that affect the stability of the existence of a large short circuit short circuit such as three phase short circuit. The Java-Madura-Bali (Jamali) transmission system is an example of a multi-machine system with multiple generators connected and synchronized, so the stability must be maintained. In maintaining the stability of Jamali 500 kV transmission system whose load is increasing, PT. PLN (Persero) to increase the generating capacity of about 39.1 GW and the addition of several new GITET. In this final project transient stability analysis is done by giving short circuit (short circuit) 3 phase in GITET Krian and assumed happened near by bus of Krian then do transient stability analysis. GITET Krian is selected because it is the latest GITET and has the highest load among other new GITET. Performed Load Flow analysis and transient stability using Matlab software. To determine Critical Clearing Time (CCT) is done by using combination of two methods, namely Bisection Method (Bisection Method) and Time Domain Simulation (TDS). and the results obtained is to shorten the time of search CCT, automatically and systematically with accurate value.
Keywords : Transien Stability, Multi Machine, Laod Flow, Short Circuit,
xii
xiii
KATA PENGANTAR
Alhamdulillahi Robbil ‘Alamin, segala puji dan syukur saya
panjatkan kepada Allah SWT atas berkah dan rahmat-Nya sehingga penulis dapat menyelesaikan Tugas Akhir ini dengan judul “Menentukan Critical Clearing Time (CCT) Menggunakan Kombinasi Metode
Biseksi Dan Time Domain Simulation (TDS) Pada Analisis Stabilitas Transien Sistem Transmisi Jamali 500 Kv Akibat Gangguan Hubung Singkat Di Gitet Krian”
Tugas Akhir ini disusun sebagai salah satu persyaratan menyelesaikan jenjang pendidikan S1 pada Bidang Studi Teknik Sistem Tenaga, Departemen Teknik Elektro, Fakultas Teknologi Elektro, Institut Teknologi Sepuluh Nopember.
Atas selesainya penyusunan Tugas Akhir ini, saya sebagai penulis ingin mengucapkan terima kasih kepada :
1. ALLAH SWT karena tanpaNya penulis tidak akan bisa menyelesaikan Tugas Akhir ini.
2. Kedua Orang tua saya yang selalu medoakan, memberikan
semangat dan memberikan motivasi agar saya dapat
menyelesaikan Tugas Akhir ini.
3. Bapak Prof. Dr. Ir. Adi Soeprijanto, MT. selaku dosen pembimbing pertama yang telah bersedia memberikan saya saran untuk Tugas Akhir dan selalu memberikan bimbingan dalam mengerjakan Tugas Akhir dan membimbing untuk menyelesaikan masalah, sehingga saya dapat meneyelesaikan Tugas Akhir ini. 4. Bapak Dr. Eng. Ardyono Priyadi, ST., M.Eng. selaku dosen
pembimbing kedua yang telah selalu memberikan masukan dalam mengerjakan Tugas Akhir dan bimbingan untuk dapat menyelesaikan masalah dan telah memberi masukan dalam buku agar Tugas Akhir ini dapat selesai tepat pada waktunya.
5. Teman-teman sistem tenaga lintas jalur 2016 khususnya yang mengambil di Lab PSSL yaitu Arwan, Hasbi dan Imam yang selalu memberikan info dalam pengerjaan Tugas Akhir dan info untuk bimbingan serta memberikan motivasi dan semangat saat pengerjaan Tugas Akhir.
6. Semua pihak yang yang telah bersedia meluangkan waktunya untuk membantu penyusunan Tugas Akhir ini yang tidak dapat disebutkan satu per satu.
xiv
Serta kepada semua pihak yang telah mebantu dalam masa perkuliahan dan pengerjaan Tugas Akhir. Besar harapan penulis dalam buku Tugas Akhir ini bisa memberikan masukan dan manfaat bagi pembaca. Penulis juga berharap mendapatkan kritik dan saran yang dapat membangun agar lebih baik lagi. Terima kasih
Surabaya, Juli 2018
xv
DAFTAR ISI
HALAMAN
HALAMAN JUDUL ... i
PERNYATAAN KEASLIAN TUGAS AKHIR ...v
HALAMAN PENGESAHAN ... vii
ABSTRAK ...ix
ABSTRACT ...xi
KATA PENGANTAR ... xiii
DAFTAR ISI ... xv
DAFTAR GAMBAR ... xix
DAFTAR TABEL ...xxiii
DAFTAR NOTASI DAN SIMBOL ... xxv
KONVENSI PENULISAN TUGAS AKHIR ... xxvii
BAB 1 PENDAHULUAN 1.1 Latar Belakang ...1
1.2 Permasalahan dan Batasan Masalah ...2
1.3 Tujuan ...3
1.4 Metode Penelitian ...3
1.5 Sistematika Pembahasan ...4
1.6 Relevansi...4
BAB 2 DASAR TEORI 2.1 Sistem Tenaga Listrik ... 5
2.1.1 Pembangkit ...5
2.1.2 Tranmisi ...6
2.1.3 Distribusi ...7
2.1.3 Beban ...7
2.2 Studi Aliran Daya ...8
2.2.1 Persamaan Aliran Daya ...8
2.2.2 Metode Newton Rapshon ...9
2.3 Kestabilan Sistem Tenaga ... 12
2.3.1 Kestabilan Tegangan ... 13
2.3.2 Kestabilan Frekuensi ... 13
2.3.2 Kestabilan Sudut Rotor ... 14
xvi
2.5 Persamaan Ayunan (Swing Equation) ... 15
2.6 Sistem Multimesin ... 19
2.6.1 Stabilitas Transien Multimesin ... 23
2.6.2 Diagram Aliran Stabilitas Transien ... 24
2.7 Time Domain Simulation (TDS) ... 27
2.8 Critical Clearing Time (CCT) ... 27
2.9 Metode Biseksi ... 27
2.10 Standart PLN ... 29
2.10.1 Standar Tegangan ... 29
2.10.2 Standar Pemutusan Circuit Breaker (CCT) ... 29
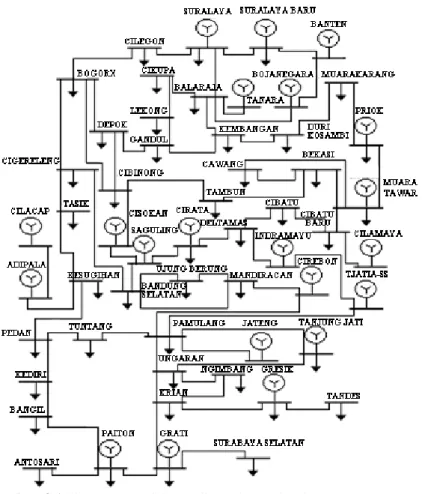
BAB 3 DATA DAN METODOLOGI 3.1 Sistem Transmisi Jawa-Madura-Bali (Jamali) 500kV pada Tahun 2019 ... 31
3.2 Data Saluran Transmisi Jamali 500 kV Tahun 2019 ... 32
3.3 Data Saluran Transmisi Jamali 500 kV Tahun 2019 Dalam Satuan PU ... 35
3.4 Kapasitas dan Pembangkitan Jamali pada Tahun 2019 ... 37
3.5 Data Pembebanan GITET Jamali pada Tahun 2019 ... 38
3.6 Data Sistem Pembangkit Jamali pada Tahun 2019 ... 40
3.7 Pengujian Kestabilan Transien ... 43
3.8 Metodologi Simulasi ... 45
BAB 4 SIMULASI DAN ANALISIS 4.1 Studi Kasus Kestabilan Transien pada Sistem Transmisi Jamali 500 kV pada Tahun 2019 ... 49
4.2 Hasil Aliran Daya ... 51
4.3 Penentuan Waktu Pemutusan Kritis (Critical Clearing Time) . 59 4.3.1 Short Circuit (SC) 3 Fasa Pada Bus Krian ... 59
4.3.1.1 Pemutusan Saluran Krian – Grati ... 59
4.3.1.2 Pemutusan Saluran Krian – Ngimbang ... 62
4.3.1.3 Pemutusan Saluran Krian – Ungaran ... 65
4.3.1.4 Hasil Kesimpulan Studi Kasus SC Pada Bus Krian ... 68
4.3.2 Short Circuit (SC) 3 Fasa Pada Bus Bandung Selatan .... 73
4.3.2.1 Pemutusan Saluran Bandung Selatan – Madiracan ... 73
4.3.2.2 Pemutusan Saluran Bandung Selatan – Saguling ... 75
xvii
4.3.2.3 Hasil Kesimpulan Studi Kasus SC Pada
Bus Bandung Selatan ... 77
4.3.3 Short Circuit (SC) 3 Fasa Pada Bus Balaraja ... 78
4.3.3.1 Pemutusan Saluran Balaraja – Cikupa ... 79
4.3.3.2 Pemutusan Saluran Balaraja – Suralaya ... 81
4.3.3.3 Hasil Kesimpulan Studi Kasus SC Pada Bus Balaraja ... 83
4.3.4 Short Circuit (SC) 3 Fasa Pada Bus Kembangan ... 84
4.3.4.1 Pemutusan Saluran Kembangan – Gandul ... 84
4.3.4.2 Pemutusan Saluran Kembangan – Balaraja ... 86
4.3.4.3 Hasil Kesimpulan Studi Kasus SC Bus Kembangan ... 88
4.3.5 Short Circuit (SC) 3 Fasa Pada Bus Ungaran ... 89
4.3.4.1 Pemutusan Saluran Ungaran – Tuntang ... 89
4.3.4.2 Pemutusan Saluran Ungaran – Pemalang ... 91
4.3.4.1 Hasil Kesimpulan Studi Kasus SC Bus Ungaran ... 93
4.4 Hasil Simulasi Lain Pencarian Waktu Pemutan Kritis ... 94
BAB 5 PENUTUP 5.1. Kesimpulan ... 97
5.2. Saran ... 98
DAFTAR PUSTAKA ... 99
LAMPIRAN A Lampiran A–1 : Matriks Y bus Sebelum Gangguan ... 101
Lampiran A–2 : Sudut Dari Matriks Ybus Sebelum Gangguan ... 107
LAMPIRAN B Lampiran B – 1 : SLD ( Single Line Diagram ) Jamali 500 kV Tahun 2019 ... 111
Lampiran B – 2 : Aliran Daya Jamali 500 kV Tahun 2019 .... 113
xviii
xix
DAFTAR GAMBAR
HALAMAN
Gambar 2.1 Penyaluran Sistem Tenaga Listrik ... 5 Gambar 2.2 (a) Generator Pembangkit Listrik, (b) Saluran
Transmisi Sistem Tenaga Listrik ... 6 Gambar 2.3 Saluran Distribusi dan Beban Sistem Tenaga Listrik ... 7 Gambar 2.4 Pemodelan Bus Secara Umum ... 8 Gambar 2.5 Sebuah Mesin yang Dihubungkan Dengan Bus
Infinite ... 14
Gambar 2.6 Single-Line Diagram Generator dan Motor ... 19
Gambar 2.7 Representasi Sistem untuk Analisis Kestabilan
Transien ... 21 Gambar 2.8 Flowchart Diagram Alur Stabilitas Transien ... 26
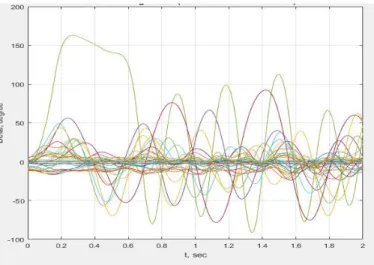
Gambar 2.9 Representasi dari Moel Biseksi ... 28 Gambar 3.1 Sistem Transmisi Jamali 500kV pada Tahun 2019 .... 31 Gambar 3.2 Respon Sudut Rotor Dalam Keadaan Tidak Stabil .... 43 Gambar 3.3 Respon Sudut Rotor Dalam Keadaan Stabil ... 44 Gambar 3.4 Flowchart Metodologi Simulasi ... 46
Gambar 4.1 Metode Biseksi Pencarian CCT Pada Bus Krian (Pemutusan Saluran Krian – Grati) ... 60 Gambar 4.2 Kurva Sudut Rotor Pemutusan Saluran Krian –
Grati dengan Time Clearing 0.163 Sec ... 61 Gambar 4.3 Kurva Sudut Rotor Pemutusan Saluran Krian –
Grati dengan Time Clearing 0.170 Sec ... 62 Gambar 4.4 Metode Biseksi Pencarian CCT Pada Bus Krian
(Pemutusan Saluran Krian – Ngimbang) ... 63 Gambar 4.5 Kurva Sudut Rotor Pemutusan Saluran Krian –
Ngimbang dengan Time Clearing 0.169 Sec ... 64 Gambar 4.6 Kurva Sudut Rotor Pemutusan Saluran Krian –
Ngimbang dengan Time Clearing 0.170 Sec ... 65 Gambar 4.7 Metode Biseksi Pencarian CCT Pada Bus Krian
(Pemutusan Saluran Krian – Ungaran) ... 66 Gambar 4.8 Kurva Sudut Rotor Pemutusan Saluran Krian –
Ungaran dengan Time Clearing 0.167 Sec ... 67 Gambar 4.9 Kurva Sudut Rotor Pemutusan Saluran Krian –
xx
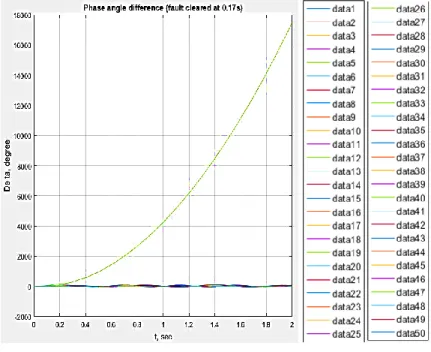
Gambar 4.10 Hasil Grafik Sudut Rotor Daerah Suralaya Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 69 Gambar 4.11 Hasil Grafik Sudut Rotor Daerah Muara Tawar
Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) . 69 Gambar 4.12 Hasil Grafik Sudut Rotor Daerah Tanjung Jati
Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) . 70 Gambar 4.13 Hasil Grafik Sudut Rotor Daerah Gresik Pada
Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 70 Gambar 4.14 Hasil Grafik Sudut Rotor Daerah Cirata Pada
Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 70 Gambar 4.15 Hasil Grafik Sudut Rotor Daerah Grati Pada
Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 71 Gambar 4.16 Hasil Grafik Sudut Rotor Daerah Saguling,
Adipala & Cilacap Pada Saat Tidak Stabil (Time
Clearing = 0.170 Sec) ... 71
Gambar 4.17 Hasil Grafik Sudut Rotor Daerah Paiton Pada
Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 71 Gambar 4.18 Hasil Grafik Sudut Rotor Daerah Priok, Bojonegoro &
Tanara Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 72 Gambar 4.19 Hasil Grafik Sudut Rotor Daerah Cirebon &
Indramayu Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 72 Gambar 4.20 Hasil Grafik Sudut Rotor Daerah Tjatia & Cisokan
Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) . 72 Gambar 4.21 Hasil Grafik Sudut Rotor Daerah Cilamaya, Jateng
& Banten Pada Saat Tidak Stabil (Time Clearing = 0.170 Sec) ... 73 Gambar 4.22 Kurva Sudut Rotor Pemutusan Saluran Bandung
Selatan – Madiracan dengan Time Clearing 0.148 Sec ... 74 Gambar 4.23 Kurva Sudut Rotor Pemutusan Saluran Bandung
Selatan – Madiracan dengan Time Clearing 0.150 Sec ... 75 Gambar 4.24 Kurva Sudut Rotor Pemutusan Saluran Bandung
Selatan – Saguling dengan Time Clearing 0.152 Sec ... 76
xxi
Gambar 4.25 Kurva Sudut Rotor Pemutusan Saluran Bandung Selatan – Saguling dengan Time Clearing 0.160 Sec ... 77 Gambar 4.26 Hasil Grafik Sudut Rotor Daerah Cirebon &
Indramayu Pada Saat Tidak Stabil (Time
Clearing = 0.160 Sec) ... 78
Gambar 4.27 Kurva Sudut Rotor Pemutusan Saluran Balaraja – Cikupa dengan Time Clearing 0.085 Sec ... 79 Gambar 4.28 Kurva Sudut Rotor Pemutusan Saluran Balaraja –
Cikupa dengan Time Clearing 0.090 Sec ... 80 Gambar 4.29 Kurva Sudut Rotor Pemutusan Saluran Balaraja –
Suralaya dengan Time Clearing 0.087 Sec ... 81 Gambar 4.30 Kurva Sudut Rotor Pemutusan Saluran Balaraja –
Suralaya dengan Time Clearing 0.090 Sec ... 82 Gambar 4.31 Hasil Grafik Sudut Rotor Daerah Priok, Bojonegoro
& Tanara Pada Saat Tidak Stabil (Time Clearing = 0.090 Sec) ... 83 Gambar 4.32 Kurva Sudut Rotor Pemutusan Saluran Kembangan-
Gandul dengan Time Clearing 0.108 Sec ... 84 Gambar 4.33 Kurva Sudut Rotor Pemutusan Saluran Kembangan-
Gandul dengan Time Clearing 0.110 Sec ... 85 Gambar 4.34 Kurva Sudut Rotor Pemutusan Saluran Kembangan-
Balaraja dengan Time Clearing 0.106 Sec ... 86 Gambar 4.35 Kurva Sudut Rotor Pemutusan Saluran Kembangan-
Balaraja dengan Time Clearing 0.110 Sec ... 87 Gambar 4.36 Hasil Grafik Sudut Rotor Daerah Grati Pada Saat
Tidak Stabil (Time Clearing = 0.110 Sec) ... 88 Gambar 4.37 Kurva Sudut Rotor Pemutusan Saluran Ungaran –
Ngimbang dengan Time Clearing 0.149 Sec ... 89 Gambar 4.38 Kurva Sudut Rotor Pemutusan Saluran Ungaran –
Ngimbang dengan Time Clearing 0.150 Sec ... 90 Gambar 4.39 Kurva Sudut Rotor Pemutusan Saluran Ungaran –
Pemalang dengan Time Clearing 0.147 Sec ... 91 Gambar 4.40 Kurva Sudut Rotor Pemutusan Saluran Ungaran –
Pemalang dengan Time Clearing 0.150 Sec ... 92 Gambar 4.41 Hasil Grafik Sudut Rotor Daerah Tanjung Jati Pada
xxii
xxiii
DAFTAR TABEL
HALAMAN
Tabel 2.1 Standar Tegangan PLN ... 29 Tabel 2.2 Standar Waktu Pemutusan ... 30 Tabel 3.1 Data Saluran Sistem Jamali 500kV pada Tahun
2019 ... 32 Tabel 3.2 Data Saluran Sistem Interkoneksi 500 kV Jamali
Dalam PU ... 35 Tabel 3.3 Data Kapasitas Pembangkit Jamali pada Tahun
2019 ... 37 Tabel 3.4 Data Pembebanan GITET Transmisi Jamali pada
Tahun 2019 ... 39 Tabel 3.5 Data Sistem Pembangkit Transmisi Jamali pada
Tahun 2019 ... 41 Tabel 4.1 Studi Kasus Bus Analisis Kestabilan Transien ... 50 Tabel 4.2 Hasil Aliran Daya pada Software Matlab ... 51 Tabel 4.3 Matriks Admitansi (Ybus) ... 56 Tabel 4.4 Hasil Data – Data Generator ... 56 Tabel 4.5 Hasil Simulasi CTT Untuk SC pada Bus Krian ... 69 Tabel 4.6 Hasil Simulasi CTT Untuk SC pada Bus Bandung
Selatan ... 78 Tabel 4.7 Hasil Simulasi CTT Untuk SC pada Bus Balaraja ... 83 Tabel 4.8 Hasil Simulasi CTT Untuk SC pada Bus
Kembangan ... 88 Tabel 4.9 Hasil Simulasi CTT Untuk SC pada Bus Ungaran ... 93 Tabel 4.10 Hasil Simulasi CTT Untuk Studi Kasus Lainnya ... 94
xxiv
xxv
DAFTAR NOTASI DAN SIMBOL
Ii Arus pada pada bus i Pi Daya aktif pada bus i Qi Daya reaktif pada bus i
Deret jumlahE Tegangan generator di belakang reaktansi transien Tm Torsi mekanik generator
Te Torsi elektrik generato Pm Daya mekanik generator Pe Daya elektrik generator
Yij Matrik admitansi bus reduksi gangguan J Momen inersia dalam satuan Kg m2 Hi Konstanta inersia mesin i dalam MVA base 𝛿m Posisi sudut daya sinkron
𝜔m Percepatan sudut sinkron
𝜔s Percepatan sudut fundamentar = 2 𝜋 𝑓 d δi
dt Turunan dari sudut daya
Xd Reaktansi transien generator
SB MVA base
Wk Energi kinetic saat mesin generator berputar
P Pole (kutub)
xxvi
xxvii
KONVENSI PENULISAN TUGAS AKHIR
a. Variabel matriks dicetak huruf kapital dan tebal. Contoh: I, V, P, Q dan J.
b. Variabel bukan matriks dicetak miring dan tidak tebal serta dapat ditulis kapital maupun tidak tergantung pada kegunaannya. Contoh : arus (I), daya (P), dan sebagainya.
c. Komponen yang terkandung dalam bus, ditulis dengan huruf capital dan tidak tebal, sedangkan notasi bus ditulis kecil / subscript. Contoh : Ii (arus bus i), Pi (daya bus i), dan sebagainya.
d. Persamaan – persamaan atau rumus – rumus ditulis di tengah (center) dengan huruf tidak tebal.
e. Variabel deret penjumlahan angka dituliskan dengan notasi sigma dengan huruf capital dan tidak tebal. Notasi sigma juga dituliskan dengan batasan – batasan yang tersedia (batas atas dan bawah).
xxviii
1
BAB 1
PENDAHULUAN
1.1
Latar Belakang
Untuk menunjang kebutuhan tenaga listrik di Pulau Jawa dan Bali, PT. PLN (Persero) melakukan penambahan kapasitas pembangkit sekitar 39.1 Giga Watt (GW) dan penambahan Gardu Induk Ekstra Tegangan Tinggi (GITET) pada Muara Karang, Cigelereng, Cibatu Baru, Pamulang, Tandes dan Krian. Sistem transmisi Jamali 500 kV ini merupakan sistem multi mesin dimana terdiri dari banyak generator pembangkit yang saling terkoneksi dan bersinkronasi dengan tujuan untuk menjaga kontinuitas dan ketersediaan tenaga listrik di Jamali. Diperlukan analisis kestabilan transien yang berguna untuk menjaga sistem transmisi Jamali tersebut ditengah kenaikan beban yang dari tahun ke tahun semakin meningkat. Pada analisis kestabilan transien ini dilihat dari respon frekuensi, sudut rotor, dan tegangan. Pada sistem transmisi multi mesin, khusunya pada generator, ketika terjadi gangguan seperti hubung singkat akan terjadi loss of synchronism (keluar dari sinkronasi) apabila sudut rotor tidak stabil. Hal ini juga menyebabkan pelepasan generator dan akhirnya sistem tersebut kekurangan daya. Untuk respon frekuensi, saat terjadi gangguan hubung singkat frekuensi generator harus dalam range / batasan aman karena jika melebihi batas dapat merusak generator maupun peralatan lain yang disuplai oleh generator tersebut. Begitu pula dengan tegangan, harus berada di dalam batasan yang sudah ditentukan agar sistem tidak kekurangan suplai tegangan.
Dari data terbaru dimana terdapat penambahan beberapa GITET baru, maka diperlukan studi kasus analisis kestabilan transien dengan gangguan hubung singkat pada salah satu GITET baru tersebut. Gangguan hubung singkat diberikan pada salah satu GITET baru guna untuk mengetahui seberapa berpengaruhnya GITET tersebut terhadap sistem transmisi Jamali 500 kV. Hubung singkat 3 fasa diberikan pada GITET Krian dan diasumsikan terjadi didekat bus krian kemudian akan dilakukan analisis kestabilan transien. GITET Krian dipilih karena merupakan GITET terbaru dan yang mempunyai beban tertinggi diantara GITET Muara Karang, Cigelereng, Cibatu Baru, Pamulang dan Tandes. GITET Krian mempunyai pembebanan yang tinggi, yaitu sekitar 860 MW dikarenakan terdapat banyak industri dan apabila terjadi hubung singkat 3 fasa maka akan berdampak pada sistem transmisi Jamali 500 kV. Metode yang digunakan untuk memperbaiki kestabilan transien ketika
2
gangguan hubung singkat 3 fasa dengan menentukan Critical Clearing Time (CCT) menggunakan kombinasi metode biseksi dan Time Domain Simulation (TDS). Dengan menggunakan penentuan CCT, maka diperoleh hasil dari respon frekuensi, sudut rotor, dan tegangan saat terjadi gangguan. Keadaan yang stabil akan menjadi tujuan utama dengan respon frekuensi, sudut rotor, dan tegangan yang masih bekerja pada batasan yang ditentukan.
1.2
Permasalahan dan Batasan Masalah
Hal yang menjadi permasalahan dalam pengerjaan Tugas Akhir ini yaitu sebagai berikut:
1. Bagaimana mendapatkan load flow (Aliran Daya) sistem transmisi Jamali 500 kV.
2. Bagaimana memperbaiki permasalahan kestabilan transien sistem transmisi Jamali 500 kV ketika terjadi gangguan.
3. Bagaimana menentukan Critical Clearing Time (CCT) atau waktu kritis pemutusan saluran ketika terjadi gangguan agar sistem transmisi Jamali 500 kV tetap stabil.
Untuk menyelesaikan masalah dalam Tugas Akhir ini, maka perlu diberi batasan-batasan sebagai berikut:
1. Sistem transmisi diasumsikan model saluran transmisi pendek. 2. Perhitungan aliran daya menggunakan software MATLAB. 3. Sistem yang digunakan adalah Jamali 500 kV berdasarkan data
dari data 2019.
4. Permodelan generator sinkron menggunakan classical generator (tanpa damping) dan generator yang ada pada sistem dimodelkan secara multi machine. Sedangkan beban dimodelkan constant impedance.
5. Simulasi sudut rotor berbasis waktu didasarkan pada Power
System Toolbox yaitu toolbox yang dikembangkan oleh Hadi
Saadat.
6. Gangguan Hubung singkat 3 fasa diasumsikan terjadi di dekat dengan bus Krian pada sistem transmisi Jamali 500 kV dan juga studi kasus pada bus lainnya transmisi Jamali 500 kV.
3
1.3
Tujuan
Tujuan yang ingin dicapai dalam Tugas Akhir ini :
1. Mengetahui aliran daya (load flow) sistem transmisi Jamali 500 kV terbaru dengan data terbaru 2019.
2. Melakukan analisa kestabilan terhadap pengaruh dari gangguan hubung singkat di GITET Krian terhadap sistem transmisi Jamali 500 kV data 2019.
3. Mengetahui pengaruh GITET Krian terhadap sistem transmisi Jamali 500 kV ketika terjadi gangguan hubung singkat.
4. Mencegah terjadinya generator mengalami kehilangan sinkronasi dikarenakan adanya ganguan hubung singkat di GITET Krian. 5. Mengetahui waktu pemutusan saluran atau Critical Clearing Time
(CCT) ketika terjadi gangguan agar sistem transmisi Jamali 500 kV tetap stabil.
1.4
Metode Penelitian
Metodologi yang digunakan pada penelitian Tugas Akhir ini adalah sebagai berikut :
1. Pengambilan Data
Penulis akan melakukan pengambilan data yang dibutuhkan dari sistem transmisi kelistrikan Jawa-Madura-Bali (Jamali) 500 kV pada tahun 2019 untuk melakukan analisis transient.
2. Pengolahan data
Data yang diperoleh digunakan untuk memperoleh aliran daya (load flow) yang disimulasikan menggunakan sotware MATLAB. 3. Simulasi dan Analisa
Simulasi dilakukan dengan menggunakan plant Jamali 500 kV tahun 2019. Menentukan gangguan hubung singkat pada bus Krian dan analisa waktu pemutusan (CCT) dengan metode biseksi. 4. Penarikan Kesimpulan dan Penulisan Buku Laporan
Dari hasil analisa penulis dapat menarik kesimpulan jawaban dari batasan waktu CB untuk melakukan pemutusan pada sistem transmisi kelistrikan Jawa-Madura-Bali (Jamali) 500 kV pada tahun 2019 saat terjadi hubung singkat.
4
1.5
Sistematika Pembahasan
Terdapat lima bab pada sistematika pembahasan penulisan dalam buku Tugas Akhir ini, sebagai berikut:
BAB I Pendahuluan
Pada bab pendahuluan ini akan dibahas mengenai latar belakang, permasalahan dan batasan masalah, tujuan, metode penelitian, sistematika pembahasan dan relevansi.
BAB II Dasar Teori
Pada bab ini secara garis besar akan diterangkan teori mengenai stabilitas transient, Critical Clearing Time (CCT) dan Metode Biseksi.
BAB III Metodologi dan Data .
Pada bab ini membahas Sistem Transmisi Kelistrikan Jawa-Madura-Bali (Jamali) 500 kV pada tahun 2019, data saluran transmisi, kapasitas dan pembangkitan, data pembebanan Gitet dan metologi simulasi dengan software MATLAB.
BAB IV Simulasi dan Analisis
Pada bab ini dilakukan simulasi dengan software MATLAB dengan disimulasikan gangguan hubung singkat dan Time Domain Simulation. Dianalisis waktu pemutusan kritis CB dengan menggunakan metode biseksi.
BAB V Penutup
Pada bab ini dijelaskan mengenai kesimpulan dan saran mengenai analisis kestabilan transient dan Critical
Clearing Time (CCT) yang telah dibahas.
1.6
Relevansi
Diharapkan dari Tugas Akhir ini mendapatkan hasil yang dapat bermanfaat dan bisa digunakan sebagai referensi pada analisa selanjutnya tentang analisa kestabilan transient sistem Jawa-Madura-Bali (Jamali) 500 kV pada tahun 2019.
5 BAB 2 DASAR TEORI 2.1. Sistem Tenaga Listrik
Untuk menyalurkan daya dari pembangkit menuju beban digunakan sistem tenaga listrik. Sistem tenaga listrik tersebut terdiri dari empat bagian yaitu sistem pembangkit, transmisi, distribusi, dan beban. Sistem pembangkit terdiri dari beberapa unit generator sinkron yang berfungsi membangkitkan daya aktif dan reaktif. Unit pembangkit ini selain terletak di sumber potensial yang ada di alam, seperti PLTA Saguling dan Cirata, PLTGU Gresik dan PLTU Paiton. Letak pembangkit yang terletak jauh dengan sumber beban maka dibutuhkan sistem transmisi dan distribusi.
Gambar 2.1 Penyaluran Sistem Tenaga Listrik 2.1.1. Generator Pembangkit Listrik
Generator tiga fasa atau biasanya disebut generator sinkron merupakan salah satu komponen yang utama dalam sistem tenaga listrik. Generator sinkron memiliki dua medan putar yang berputar bersama – sama. Medan yang satu diproduksi oleh rotor yang berputar pada kecepatan sinkron dan dieksitasi oleh arus searah (DC). Medan yang lain diproduksi oleh gulungan stator oleh karena arus tiga fasa yang mengalir pada jangkar (rotor).
Sumber dari daya mekanik (prime mover), bisa didapat dari berbagai macam jenis, contohnya turbin hidraulik di air terjun atau bendungan, turbin uap yang energinya berasal dari pembakaran batu bara atau gas, atau turbin gas yang berasal dari mesin bakar. Sekolompok unit
6
pembangkit bisa berbeda metode pembangkitannya tergantung jenis bahan bakar yang dipakai. Hal ini menyebabkan harga pembangkitan bisa bervariasi.
2.1.2. Transmisi
Transmisi erupakan proses penyaluaran tenaga listrik dari tempat pembangkit tenaga listrik (Power Plant) hingga Saluran distribusi listrik (substation distribution) sehingga dapat disalurkan sampai pada konsumen pengguna listrik. Tujuan dari jaringan transmisi adalah menyalurkan daya listrik dari pembangkit yang terletak pada daerah tertentu menuju sistem distribusi yang akan menyalurkan langsung ke beban. Sebelum adanya sistem interkoneksi suatu daerah disuplai oleh pembangkit yang ada daerah itu juga. Namun sekarang suatu daerah yang tidak dapat menyediakan pembangkit sendiri maka untuk memenuhi kebutuhan beban maka suplai didapatkan dari pembangkit yang terletak dari daerah lain. Sistem penyaluran daya antar daerah ini disebut sistem interkoneksi. Terdapat dua macam sistem transmisi, yaitu SUTET (Saluran Udara Tegangan Ekstra Tinggi) dengan tegangan 500 kV dan SUTT (Saluran Udara Tegangan Tinggi) dengan tengan 70 – 150kV.
(a)
(b)
Gambar 2.2 (a) Generator Pembangkit Listrik, (b) Saluran Transmisi Sistem Tenaga Listrik.
7 2.1.3. Distribusi
Merupakan subsistem tersendiri yang terdiri dari : Pusat Pengatur (Distribution Control Center, DCC), lC t l C t DCC). Saluran tegangan menengah (6kV dan 20kV yang juga biasa disebut tegangan distribusi primer) yang merupakan saluran udara atau kabel tanah, gardu distribusi tegangan menengah yang terdiri dari panel-panel pengatur tegangan menengah dan trafo sampai dengan panel-panel distribusi tegangan rendah (380V, 220V) yang menghasilkan tegangan kerja atau tegangan jala-jala untuk industri dan konsumen. Jika sistem transmisi memiliki basis tegangan tinggi, maka sistem distribusi memiliki basis tegangan menengah dan rendah. Sistem distribusi sendiri berfungsi menghubungkan dari sistem transmisi langsung menuju ke beban. Sistem distribusi memiliki karakteristik jaringan radial dan penyula tunggal yang berbeda dengan sistem transmisi yang berbentuk loop dan biasanya memiliki lebih dari satu penyula.
2.1.4. Beban
Beban pada sistem tenaga listrik terbagi menjadi menjadi berbagai macam jenis, seperti beban industri, komersial, dan residensial. Beban industri yang besar dapat disuplai dari transmisi system tenaga listrik. Sedangkan untuk beban – beban yang kecil dapat dilayani melalui jaringan distribusi system tenaga listrik. Beban industri berupa beban komposit dimana beban paling banyak berupa motor. Sedangkan beban komersil dan residensial paling banyak berupa penerangan, pemanas, dan pendingin.
8 2.2. Studi Aliran Daya (Load Flow)
Sistem tenaga listrik yang handal harus memenuhi beberapa kriteria antara lain daya pembangkitan mampu menopang kebutuhan beban dan rugi – rugi yang terjadi, tegangan dan power factor dalam batas nominal, generator beroperasi pada batas daya aktif dan reaktifnya dan saluran transmisi dan transformator tidak kelebihan beban. Untuk memenuhi kriteria di atas maka diperlukan suatu studi yang dinamakan studi aliran daya. Analisa ini menghitung besar tegangan dan sudut di setiap bus pada kondisi seimbang dan kondisi tunak. Selain itu analisa aliran daya menghitung aliran daya aktif dan reaktif yang mengalir di setiap peralatan yang terhubung dengan bus termasuk rugi – rugi. Namun tujuan utama dari studi aliran daya ini adalah untuk memastikan apakah dengan sistem tenaga listrik yang ada apakah memenuhi kebutuhan beban. Studi ini menjadi dasar untuk studi sistem tenaga listrik yang lain seperti kestabilan transien dan studi kontingensi.
2.2.1. Persamaan Aliran Daya
Pemodelan sederhana aliran daya yaitu satu bus dengan adanya dua atau lebih penyulang. Pemodelan ini dapat dilihat pada gambar 2.1. Impedansi saluran transmisi system tenaga listrik ini sudah diubah dalam bentuk per unit (pu) admiransi dalam base MVA yang sama.
Gambar 2.4 Pemodelan Bus Secara Umum
Hukum KCL (Khircoff Current Law) merupakan landasan hokum yang diterapkan pada bus ini, sehingga didapatkan total arus yang masuk menuju bus dalam bentuk persamaan (2.1) :
9 𝐼𝑖= 𝑉𝑖∑ 𝑦𝑖𝑗 𝑛 𝑗=0 − ∑ 𝑦𝑖𝑗 𝑉𝑗 𝑛 𝑗=1 𝑗 ≠ 1 (2.1)
Untuk mencari arus pada bus i dengan menggunakan daya aktif dan reaktif dapat menggunakan persamaan (2.2) berikut ini :
𝐼𝑖 =
𝑃𝑖− 𝑗𝑄𝑖 𝑉𝑖
(2.2)
Dari persamaan (2.1) yang disubstitusikan dengan persamaan (2.2) maka akan menjadi persamaan baru (2.3). Dari persamaan (2.3) ini, formulasi dari permasalahan aliran daya dinyatakan secara matematis yang berupa persamaan aljabar nonlinier yang harus diselesaikan dengan metode iterasi. 𝑃𝑖− 𝑗𝑄𝑖 𝑉𝑖 = 𝑉𝑖∑ 𝑦𝑖𝑗 𝑛 𝑗=0 − ∑ 𝑦𝑖𝑗 𝑉𝑗 𝑛 𝑗=1 𝑗 ≠ 1 (2.3)
2.2.2. Metode Newton Raphson
Persamaan dalam bentuk polar untuk jenis bus pada sistem tenaga seperti pada gambar 2.1, dapat dinyatakan seperti berikut :
𝐼𝑖 = ∑ |𝑌𝑖𝑗| |𝑉𝑗| ∠ 𝜃𝑖𝑗+ 𝛿𝑗 𝑛
𝑗=1
(2.4)
Dari hasil bentuk polar pada persamaan (2.4), disubstitusikan dengan persamaan (2.2) yaitu persamaan daya aktif reaktif pada bus i, sehingga menjadi persamaan sebagai berikut :
𝑃𝑖− 𝑗𝑄𝑖= |𝑉𝑖| ∠ − 𝛿𝑖 ∑ |𝑌𝑖𝑗| |𝑉𝑗| ∠ 𝜃𝑖𝑗+ 𝛿𝑗 𝑛
𝑗=1
𝑗 ≠ 1 (2.5)
Selanjutnya yaitu memisahkan bagian yang nyata (daya aktif) dan bagian imajiner (daya reaktif) menjadi :
10 𝑃𝑖= ∑|𝑉𝑖| |𝑌𝑖𝑗| |𝑉𝑗|𝑐𝑜𝑠 ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) (2.6) 𝑛 𝑗=1 𝑄𝑖= − ∑|𝑉𝑖| |𝑌𝑖𝑗| |𝑉𝑗| 𝑠𝑖𝑛 ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) (2.7) 𝑛 𝑗=1
Dengan demikian, setiap bus beban memiliki dua persamaan yaitu persamaan daya aktif (2.6) dan persamaan daya reaktif (2.7), sedangkan PV bus hanya memiliki satu persamaan yaitu persamaan (2.10). Berdasarkan persamaan di atas, maka dapat dijabarkan menurut deret Taylor menjadi :
Persamaan (2.8) di atas diasumsikan bahwa bus satu sebagai
slack bus. Dengan menggunakan Matrik Jacobian, didapatkan hubungan
yang linier antara perubahan sudut tegangan dan besar tegangan dengan perubahan daya aktif dan reaktif. Elemen dari matrik Jacobian merupakan turunan sebagian dari persamaan (2.10) dan (2.11), dievaluasi terhadap perubahan sudut dan besar tegangan. Dapat dituliskan menjadi persamaan berikut ini : [∆𝑸∆𝑷] = [ 𝑱𝑱𝟏 𝑱𝟐 𝟑 𝑱𝟒] [ ∆𝜹 ∆ |𝑽| ] (2.9) (2.8)
11 Untuk elemrn J1 adalah :
𝜕𝑃𝑖 𝜕𝛿𝑖
= − |𝑉𝑖| |𝑌𝑖𝑗| |𝑉𝑗| 𝑠𝑖𝑛 ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑗 ≠ 1 (2.10)
Untuk elemrn J2 adalah :
𝜕𝑃𝑖 𝜕|𝑉𝑗|
= |𝑉𝑖| |𝑌𝑖𝑗| 𝑐𝑜𝑠 ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑗 ≠ 1 (2.11)
Untuk elemrn J3 adalah :
𝜕𝑄𝑖 𝜕𝛿𝑖
= − |𝑉𝑖| |𝑌𝑖𝑗| |𝑉𝑗| 𝑐𝑜𝑠 ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑗 ≠ 1 (2.12)
Untuk elemrn J4 adalah :
𝜕𝑄𝑖 𝜕|𝑉𝑗|
= |𝑉𝑖| |𝑌𝑖𝑗| 𝑠𝑖𝑛 ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑗 ≠ 1 (2.13)
Nilai ∆Pi (k) dan ∆Qi (k) adalah perbedaan antara nilai input dengan nilai yang dihitung yang diketahui sebagai power residual, yang dapat ditulis sebagai :
∆𝑃𝑖(𝑘)= 𝑃𝑖𝑠𝑐ℎ− ∆𝑃 𝑖
(𝑘) (2.14)
∆𝑄𝑖(𝑘)= 𝑄𝑖𝑠𝑐ℎ− ∆𝑄𝑖
(𝑘) (2.15)
Nilai estimasi tegangan bus yang baru didapat dengan persamaan :
∆𝛿𝑖(𝑘+1)= 𝛿𝑖(𝑘)− ∆𝛿𝑖(𝑘) (2.20)
12
Proses iterasi akan terus berjalan dan jika selisi power residual kurang dari nilai yang diinginkan dalam akurasi, maka proses iterasi akan berhenti. Hal tersebut dapat dinyatakan sebagai berikut :
|∆𝑃𝑖(𝑘)| ≤ ∈ (2.21)
|∆𝑄𝑖(𝑘)| ≤ ∈ (2.21)
Dengan demikian, didapatkan nilai arus (Iij) dan daya kompleks (Sij) dari bus i ke bus j dapat dinyatakan sebagai berikut :
𝐼𝑖𝑗= 𝑦𝑖𝑗 (𝑉𝑖− 𝑉𝑗) + 𝑦𝑖0 𝑉𝑖 (2.22) 𝑆𝑖𝑗 = 𝑉𝑖 𝐼𝑖𝑗∗ (2.23)
2.3. Kestabilan Sistem Tenaga
Kestabilan sistem tenaga listrik dapat diartikan yaitu merupakan kemampuan dari sistem tenaga listrik dengan kondisi awal yang stabil akan memperoleh titik operasi yang setara setelah mengalami gangguan fisik, dengan nilai tertentu masih dalam batas, sehingga secara praktis seluruh sistem masih utuh [4]. Pada abad 19, stabilitas pada sistem tenaga telah disadari sebagai masalah yang penting. Buruknya tingkat stabilitas suatu sistem tenaga maka akan mengakibatkan banyak kejadian pemadaman dan menggambarkan sangat pentingnya fenomena (kestabilan) ini. Bertambahnya saluran terinterkoneksi, penggunaan teknologi dan kontrol, dan bertambahnya operasi yang membebani peralatan untuk bekerja mendekati batasnya merupakan hal yang penting dan harus diperhatikan dalam kestabilan sistem. Fenomena ketidakstabilan dapat dibedakan menjadi beberapa macam, yaitu ketidak stabilan tegangan, ketidakstabilan frekuensi, dan osilasi antar daerah menjadi permasalahan yang harus diperhatikan lebih banyak.
Pada sistem tenaga listrik, masalah kestabilan dapat dibagi menjadi tiga bagian dari bentuk gangguan dan skala besar kecilnya gangguan, antara lain [5] :
1. Kestabilan Steady-State 2. Kestabilan Transien 3. Kestabilan Dinamis
13
Pada sistem tenaga listrik terdapat dua kategori gangguan yang menyebabkan masalah kestabilan tersebut, yaitu :
1. Gangguan Kecil, merupakan gangguan dengan perubahan sisi beban maupun sisi pembangkit dengan acak, perlahan, dan meningkat ataupun menurun. Gangguan kecil dapat berupa emutusan jaringan dalam jaringan sistem tenaga listrik, akan tetapi apabila tidak berpengaruh secara signifikan sebelum adanya gangguan pada aliran daya di jaringan sistem.
2. Gangguan Besar, merupakan gangguan yang menyebabkan perubahan secara mendadak di tegangan bus yang seharusnya segera dihilangkan. Kestabilan sistem sangat terpengaruh dengan gangguan tersebut apabila tidak langsung dihilangkan. Panjang waktu gangguan juga dapat mempengaruhi kestabilan sistem tersebut.
2.3.1. Kestabilan Tegangan
Kapabiltas sistem untuk dapat bertahan dengan tegangan yang stabil ditiap bus dalam sistem setelah mengalami gangguan dan kembali pada kondisi awal yang ditentukan merupakan kestabilan tegangan. Keadaan tersebut bergantung kepada sistem untuk dapat bertahan ataupun kembali pada keadaan seimbang antara suplai beban dengan permintaan beban dari sistem tenaga. Terjadinya turun atau naiknya tegangan pada beberapa bus dapat disebabkan oleh adanya sistem yang tidak seimbang. Pelepasan beban dampak dari apabila tegangan tidak stabil. Akibat pelepasan tersebut menyebabkan tidak sinkronnya antar generator. [5]
2.3.2. Kestabilan Frekuensi
Kestabilan frekuensi mengacu pada kemampuan sistem tenaga listrik untuk menjaga frekuensi tetap seimbang dari sistem yang kacau yang menyebabkan ketidakseimbangan antara pembangkitan dan beban. Kapabilitas sistem untuk dapat bertahan dengan frekuensi yang stabil pada saat adanya gangguan yang disebabkan oleh antara daya yang dibangkitkan dan daya yang diminta beban yang sangat tidak seimbang disebut sebagai kestabilan frekuensi. masalah berkelanjutan dari ayunan frekuensi yang dapat mengakibatkan lepasnya generator atau beban terjadi karena adanya sistem yang tidak stabil. Ayunan frekuensi yang
14
terus – menerus merupakan dampak dari ketidakstabilan dan hal tersebut akan berakibat pada putusnya unit pembangkit atau beban. [5]
2.3.3. Kestabilan Sudut Rotor
Kestabilan sudut rotor ialah kondisi pada saat setelah adanya gangguan dapat kembali sinkron yang merupakan kemampuan mesin sinkron. Hal tersebut dipengaruhi dengan kemampuan menjaga atau memulihkan keseimbangan dari torsi elektromaknetik dan torsi mekanik dalam sistem tiap mesin sinkron. Sistem yang tidak stabil dapat menyebabkan terjadinya peningkatan ayunan sudut pada beberapa generator yang menimbulkan tidak sinkronisasi generator dengan generator lainnya. Kemampuan menjaga atau memulihkan keseimbangan dari torsi elektromaknetik dan torsi mekanik merupakan hal penting untuk kestabilan sudut rotor. Terjadinya peningkatan ayunan sudut pada beberapa generator yang menimbulkan tidak sinkronisasi generator dengan generator lainnya diakibatkan karena ketidakstabilan sudut rotor tersebut. [5]
Pada mesin sinkron yang torsi elektromaknetiknya berubah yang disebabkan oleh gangguan dapat diselesaikan kedalam dua komponen, berikut:
1. Komponen torsi sinkronisasi, dalam fasa dengan deviasi sudut rotor. 2. Komponen torsi damping, dalam fasa dengan deviasi kecepatan.
2.4. Pemodelan Generator Sinkron
Pemodelan generator sinkron dengan tegangan sumber yang konstan dan terletak dibelakang reaktansi mesin dapat digambarkan pada gambar berikut :
15
Classical Model merupakan jenis pemodelan generator sinkron
yang sederhana sehingga dipilih untuk analisis kestabilitas transien. Pada pemodelan tersebut, sifat salien diabaikan, dan mesin direpresentasikan dengan tegangan konstan (E’) dibelakang reaktansi transien direct axis (Xd’). Melalui transmisi, sebuah generator dihubungkan dengan grid dan dapat dimodelkan seperti gambar 2.5.
Pada kondisi transien dan sub transien dapat menggunakan pemodelan tersebut. Model transien terdiri dari reaktansi transien dan tegangan, dimana diasumsikan konstan selama durasi analisis kestabilan transien. Pemodelan transien elektromagnet dari mesin ini dapat dias umsikan valid untuk waktu mula dan dapat digunakan untuk mengestimasi stabilitas ayunan pertama dari mesin sinkron [10].
Tegangan dan frekuensi pada bus dianggap konstan jika menggunakan pemodelan infinite bus. Hal ini disebabkan daya yang disuplai atau dikonsumsi oleh bus tidak berpengaruh terhadap karakteristik generator. Contoh pemodelan generator yang mendekati kondisi fisik nyata generator di lapangan adalah pemodelan generator salient pole (GENSAL) dan pemodelan generator dengan round rotor (GENROU) [11].
Untuk melihat pengaruh generator sinkron dari sistem yang mengalami gangguan kestabilan transien, maka generator dapat dimodelkan menjadi dua cara yaitu sistem multimesin dan sistem single
machine infinite bus (SMIB). Pemodelan multimesin berarti memodelkan
generator sendiri – sendiri atau menjadikan sekumpulan generator yang
coherent menjadi kelompok – kelompok generator. Sedangkan
Pemodelan SMIB berarti memodelkan seluruh generator menjadi satu generator dan terhubung dengan infinite bus.
2.5. Persamaan Ayunan (Swing Equation)
Posisi relative dari sumbu rotor dan arah resultan magnet akan tetap pada kondisi normal. Sudut diantara keduanya disebut sudut daya atau sudut torsi. Ketika terjadi gangguan, rotor akan bergerak melambat atau cepat tergantung dari mmf celah udara dan permulaan gerak relative. Swing eqution merupakan persamaan yang menyebutkan pergerakan relative. Jika periode osilasi, rotoe akan kembali mengunci pada kecepatan sinkron, dan generator tersebut akan mempertahankan
16
kestabilannya. Jika gangguan tidak melibatkan perubahan apapun terhadap daya, rotor akan kembali ke posisi mula. Faktor – faktor yang menyebabkan rotor akan beroperasi pada sudut daya relative yang baru untuk mensinkronkan medan putar adalah adanya perubahan yang melibatkan perubahan besar pada pembangkitan, beban, maupun kondisi jaringan.
Perlu adanya pemodelan generator sinkron untuk mengetahui dampak dari perubahan sudut daya. Suatu generator sinkron membangkitkan torsi elektromekanis yang dinotasikan dengan Te dan berputar pada kecepatan sinkron yang dinotasikan dengan 𝜔sm. Jika Tm merupakan torsi mekanik penggerak dari generator, maka dalam keadaan tunak dengan rugi – rugi diabaikan, maka akan didapatkan persamaan :
𝑇𝑚 = 𝑇𝑒 (2.24) Berpindahnya dari keadaan tunak karena gangguan akan menyebabkan rotor mengalami percepatan yang disimbolkan Tm > Te maupun perlambatan yang disimbolkan dengan Tm < Te. Percepatan dan perlambatan tersebut dinotasikan dengan Ta. Sehingga Ta dapat dinyatakan sebagai berikut :
𝑇𝑎 = 𝑇𝑚− 𝑇𝑒 (2.25) Jika momen inersia dari prim mover dan generator disimbolkan dengan J, dan dengan mengabaikan gesekan dan torsi peredam, dari hokum rotasi dapat dinyatakan dengan persamaan :
𝐽 𝑑 2 𝜃
𝑚
𝑑𝑡2 = 𝑇𝑎 (2.26) Dimana 𝜃𝑚 merupakan perpindahan sudut rotor terhadap sudut referensi tetap pada stator. Untuk mengukur posisi sudut rotor dengan referensi medan putar sinkron yang disimbolkan 𝛿𝑚, maka referensi harus diubah dari referensi tetap stator dengan referensi medan putar sinkron yang dapat dinyatak pada persamaan berikut :
𝜃𝑚= 𝜔𝑠𝑡 − 𝛿𝑚 (2.27) Untuk mendapatkan kecepatan sudut rotor maka besar perpindahan posisi sudut rotor diturunkan terhadap waktu. Hal ini dapat
17
dinyatakan pada persamaan (2.28). Penurunan sekali lagi terhadap waktu dengan kecepatan sinkron adalah konstan, maka didapatkan percepatan sudut rotor yang dapat dinyatakan dengan persamaan (2.29) :
𝜔𝑚 = 𝑑 𝜃𝑚 𝑑𝑡 = 𝜔𝑚 + 𝑑 𝛿𝑚 𝑑𝑡 (2.28) 𝑑2 𝜃 𝑚 𝑑𝑡2 = 𝑑2 𝛿 𝑚 𝑑𝑡2 (2.29) Dengen mensubstitusikan persamaan (2.27), (2.28), dan (2.29) kedalam persamaan (2.26) menjadi :
𝐽 𝑑 2 𝜃 𝑚 𝑑𝑡2 = 𝑇𝑚− 𝑇𝑒 (2.30) 𝐽 𝜔𝑚 𝑑2 𝜃 𝑚 𝑑𝑡2 = 𝜔𝑚 𝑇𝑚− 𝜔𝑚 𝑇𝑒 (2.30) 𝐽 𝜔𝑚 𝑑2 𝜃 𝑚 𝑑𝑡2 = 𝑃𝑚− 𝑃𝑒 (2.30) Konstanta inersia juga dapat disebut dengan symbol 𝐽𝜔𝑚dan disimbolkan dengan M. Jika dihubungkan dengan energi kinetik yang ada pada massa yang berputar maka dapat ditulis:
𝑊𝑘 = 1 2 𝐽 𝜔𝑚
2 = 1
2 𝑀 𝜔𝑚 (2.31) Meskipun M disebut sebagai inersia konstanta, akan tetapi tidak akan selamanya tetap pada kondisi nyata ketika kecepatan rotor melenceng dari kecepatan sinkron. Namun karena 𝜔𝑚tidak mengalami perubahan yang terlalu besar sebelum sistem mengalami ketidakstabilan, maka M dievaluasi pada saat kecepatan sinkron dan diasumsikan tetap konstan, dapat dinyatakan dengan persamaan (2.32). Konstanta inersia dapat dihubungkan dengan Swing equation dan menjadi persamaan (2.33)
𝑀 = 2 𝑊𝑘 𝜔𝑠𝑚 (2.32) 𝑀 𝑑 2 𝜃 𝑚 𝑑𝑡2 = 𝑃𝑚− 𝑃𝑒 (2.33)
18
Jika sudut daya elektrik 𝛿dihubungkan dengan swing equation dan p sebagai jumlah pole dari generator sinkron maka dapat dinyatakan dengan persamaan berikut :
𝛿 = 𝑃 2 𝛿𝑚 (2.34) 2 𝑃 𝑀 𝑑2 𝛿 𝑑𝑡2 = 𝑃𝑚− 𝑃𝑒 (2.35) Pada analisa system tenaga listrik, satuan yang digunakan adalah satuan per unit, sehingga swing equation juga harus dibawa ke dalam satuan per unit tersebut. Persamaan (2.35) dibagi dengan MVA base (SB), dan mensubstitusikan M yang didapat dari persamaan (2.32) dan akan didapatkan persamaan berikut :
2 𝑝 2 𝑊𝑘 𝜔𝑠𝑚 𝑆𝐵 𝑑 2 𝛿 𝑑𝑡2 = 𝑃𝑚 𝑆𝐵 − 𝑃𝑒 𝑆𝐵 (2.36)
Konstanta inersia dalam satuan per unit dinotasikan dengan H. Sedangkan energi kinetic dalam satuan mega joule pada saat mesin berputar pada kecepatan normal dinotasikan dengan Wk. Dengan menstitusikan H pada persamaan (2.37) pada persamaan (2.36) maka didapatkan persamaan (2.38) : 𝐻 = 𝑊𝑘 𝑆𝐵 (2.37) 2 𝑝 2 𝐻 𝜔𝑠𝑚 𝑑 2 𝛿 𝑑𝑡2 = 𝑃𝑚 (𝑝𝑢) − 𝑃𝑒 (𝑝𝑢) (2.38) Daya mekanik dalam satuan per unit dinotasikan dengan Pm (pu) dan daya elektrik dalam satuan per unit dinotasikan dengan Pe (pu). Jika persamaan (2.38) dinyatakan dalam bentuk kecepatan sudut elektrik (𝜔𝑠) maka menjadi persamaan :
2 𝐻 𝜔𝑠
𝑑 2 𝛿
19 2.6. Sistem Multimesin
Suatu sistem tenaga listrik multimesin adalah interkoneksi beberapa pembangkit menjadi suatu sistem yang bekerja secara terintegrasi, akibatnya terjadi saling mempengaruhi antara satu pembangkit dengan pembangkit yang lain. Perubahan setting operasi sistem akan menyebabkan perubahan sudut mesin dan tegangan mesin yang terjadi dibagian torsi listrik , eksitasi dan terminal (bus) yang memberikan perubahan parameter antar mesin.
Dalam stabulitas sistem tenaga listrik, karakteristik hubungan diantara daya dan posisi rotor adalah karakteristik paling penting dalam mesin sinkron.
Gambar 2.6 Single-line diagram generator dan motor [3] Permasalahan multimesin dapat ditulis sama dengan sistem satu mesin yang terhubung dengan bus infinite. Untuk mengurangi kerumitan dari analisis kestabilitas transien. Beberapa asumsi digunakan untuk mengurangi kerumitan dari analisis kestabilitas transien antara lain [9] : Masing – masing mesin sinkron direpresentasikan sebagai sumber
tegangan konstan yang terletak di belakang dari reaktansi transien sumbu langsung (direct axis). Representasi ini mengabaikan efek dari saliensi dan mengasumsikan nilai flux yang konstan.
Pengaruh dari governor diabaikan dan daya masukan diasumsikan tetap selama periode simulasi.
Penggunaan tegangan bus pra gangguan, semua beban diubah menjadi admitansi yang setara terhadap ground dan diasumsikan konstan. Daya redam diabaikan.
Sudut rotor mekanik dari masing – masing mesin bertemu dengan sudut tegangan dibelakang reaktansi mesin.
Mesin yang berada pada gardu yang sama berayun bersama dan dapat dikatakan coherent. Sekelompok mesin yang coherent direpresentasikan sebagai satu mesin yang setara.
20
Dalam menyelesaikan masalah analisis kestabilan transien yang pertama adalah menyelesaikan aliran daya awal dan menentukan tegangan mula serta sudut fasanya. Aliran daya tersebut harus sesuai dengan standarisasi yang sudah ada. Dengan menggunakan persamaan (2.40) maka akan didapatkan arus pada mesin sebelum terjadi gangguan. Persamaan tersebut sebagai berikut :
𝐼𝑖= 𝑆𝑖∗ 𝑉𝑖∗ = 𝑃𝑖− 𝐽 𝑄𝑖 𝑉𝑖∗ 𝑖 = 1,2, … , 𝑚 (2.40) Dimana : M = jumlah generator
𝑉𝑖∗ = tegangan pada generator i Pi = daya aktif generator
Qi = daya reaktif generator
Parameter yang diketahui ditentukan dari solusi aliran daya mula. Resistansi jangkar yang biasanya dinotasikan dengan (Ra) dari generator diabaikan karena bernilai sangat kecil dan E yang merupaka tegangan dibelakang reaktansi transien dapat dinyatakan sebagai persamaan berikut :
𝐸𝑖′= 𝑉𝑖 + 𝐽 𝑋𝑑′ 𝐼𝑖 (2.41)
Jika beban diubah menjadi admitansi equivalent dengan menggunakan persamaan (2.41) maka dapat dinyatakan sebagai berikut :
𝑦𝑖0= 𝑆𝑖∗ | 𝑉𝑖 | 2 = 𝑃𝑖− 𝐽 𝑄𝑖 | 𝑉𝑖 | 2 (2.42)
Untuk memasukan tegangan dibekang reaktansi transien (Xd'), bus m (generator) ditambahkan pada n (bus) pada jaringan sistem tenaga tersebut. Jaringan yang setara dengan semua beban dikonversi menjadi admitansi dapat dianalogikan seperti gambar 2.6 [12].
21
Gambar 2.7 Representasi Sistem untuk Analisis Kestabilan Transien Titik n+1, n+2, n+3, n+4 sampai n+m adalah bus bayangan dari dalam mesin / generator. Persamaan tegangan pada system tersebut dapat dinyatakan sebagai berikut :
…….. 𝐼𝑏𝑢𝑠= 𝑌𝑏𝑢𝑠 𝑉𝑏𝑢𝑠 (2.44) Dimana :
Ibus = vektor arus yang masuk ke dalam bus
Vbus = vektor tegangan bus yang dihitung dari titik referensi Ybus = admitansi bus yang terhubung dengan bus tersebut
Penjumlahan admitansi yang terhubung dengan bus tersebut dinotasikan pada elemen diagonal dari bus admitansi, dan elemen bukan diagonal adalah negative admitansi yang terhubung dengan titik tersebut. Yang membedakan dengan aliran daya normal adalah adanya penambahan titik untuk memasukan tegangan dibelakan reaktansi transien (Xd’). Elemen diagonal juga dimodifikasi untuk menambahkan admitansi beban.
Dengan menghilangkan / mengeliminasi semua titik selain titik di dalam nesin adalah cara untuk menyerdehanakan analisa tersebut.
G G G G n + 1
Jaringan
bus ke–n.
Beban
dikonversi
kan ke
admitansi
konstan.
n + 2 n + 3 n + 4 (2.43)22
Untuk menghilangkan bus beban, persamaan (2.42) yaitu bus matrik admitansi dipartisi sehingga sejumlah n bus yang dihilangkan dapat direpresentasikan baris n atas. Arus pada baris ke n dapat dianggap nol sehingga tidak ada arus yang memasuki bus beban. Simbol Im merupakan notasi dari arus pada generator, sedangkan symbol Em’ dan Vn’ adalah notasi dari tegangan pada generator dan tegangan pada bus beban. Sehingga didapatkan persamaan :
[ 𝐼0 𝑚 ] = [ 𝑌𝑛𝑛 𝑌𝑛𝑚 𝑌𝑛𝑚𝑡 𝑌𝑚𝑚 ] [ 𝑉𝑛 𝐸𝑚′ ] (2.45) Proses eliminasi vektor tegangan Vn adalah dengan mendapatkan persamaan (2.46), dan (2.47). Berikut ini merupakan persamaan – persamaannya :
0 = 𝑌𝑛𝑛 𝑉𝑛+ 𝑌𝑛𝑚 𝐸𝑚′ → 𝑉𝑛= ( − 𝑌𝑛𝑛 )−1 𝑌𝑛𝑚 𝐸𝑚′ (2.46) 𝐼𝑚= 𝑌𝑛𝑚𝑡 𝑉𝑛+ 𝑌𝑚𝑚 𝐸𝑚′ (2.47) Persamaan (2.46) disubstitusikan ke dalam persamaan (2.47) menjadi matrik bus admitansi reduksi yang memiliki ordo (m x m), dimana m adalah jumlah generator. Persamaan matrik bus admitansi reduksi dinyatakan sebagai berikut :
𝐼𝑚= [ 𝑌𝑛𝑚− 𝑌𝑛𝑚𝑡 𝑌𝑛𝑛−1 𝑌𝑛𝑚] 𝐸𝑚′ (2.48) 𝐼𝑚= 𝑌𝑏𝑢𝑠𝑟𝑒𝑑 𝐸𝑚′ (2.49) Daya keluaran elektrik dari masing – masing mesin dapat dinyatakan dalam istilah tegangan internal mesin dengan persamaan (2.51). Dan arus yang mengalir dinyatakan dengan persamaan (2.52) :
𝑆𝑒𝑖∗ = 𝐸𝑖′∗ 𝐼𝑖 (2.50) 𝑃𝑒𝑖=
[ 𝐸𝑖′∗ 𝐼𝑖 ] (2.51) 𝐼𝑖 = ∑ 𝐸𝑗′∗ 𝑚 𝑗=1 𝑌𝑖𝑗 (2.52)23
Jika persamaan (2.51) dinyatakan dalam bentuk polar dengan 𝐸𝑖′∗= |𝐸𝑖′∗| ∠ 𝛿𝑖 dan 𝑌𝑖𝑗= |𝑌𝑖𝑗| ∠ 𝜃𝑖𝑗 , dan disubstitusikan dengan Ii pada persamaan (2.52) maka akan menjadi persamaan :
𝑃𝑒𝑖 = ∑ |𝐸𝑖′| |𝐸𝑗′| |𝑌𝑖𝑗| cos ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑚
𝑗=1
(2.53)
Persamaan (2.53) diatas sama dengan persamaan aliran daya (2.6). Adanya kesetaraan antara masukan daya mekanik dan keluaran daya elektrik
sebelum terjadi ganguan dapat dinyatakan dengan persamaan sebagai berikut :
𝑃𝑚𝑖 = ∑ |𝐸𝑖′| |𝐸𝑗′| |𝑌𝑖𝑗| cos ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑚
𝑗=1
(2.54)
2.6.1. Stabilitas Transien Multimesin
Gangguan hubung singkat tiga fasa pada suatu bus merupakan dasar untuk analisis kestabilan transien klasik. Gangguan tiga fasa pada bus k pada jaringan menyebabkan tegangan pada bus yang terjadi hubung singkat tersebut bernilai nol (Vk = 0). Hal ini disimulasikan dengan menghilangkan baris dan kolom ke k dari matrix admitansi bus sebelum gangguan. Selain itu menambahkan matrik admitansi Yik ke matrik admitansi Yii untuk semua bus i yang tIrhubung ke bus gangguan atau (bus k). Matrix admitansi yang baru dikurangi dengan menghilangkan semua titik kecuali titik generator internal. Tegangan eksitasi generator selama gangguan dan setelah gangguan diasumsikan nilainya tetap. Daya elektrik dari generator ke i dalam istilah matrix admitansi baru yang telah direduksi diperoleh dari persamaan (2.53).
Persamaan ayunan dengan system redaman diabaikan, seperti pada persamaan (2.39) untuk mesin I dapat dinyataka dengan persamaan sebagai berikut : 2 𝐻 𝜔𝑠 𝑑 2 𝛿 𝑑𝑡2 = 𝑃𝑚𝑖− ∑ |𝐸𝑖′| |𝐸𝑗′| |𝑌𝑖𝑗| cos ( 𝜃𝑖𝑗− 𝛿𝑖 + 𝛿𝑗 ) 𝑚 𝑗=1 (2.55)
24 Dimana :
Yij = matrik admitansi bus reduksi gangguan
Hi = konstanta inersia mesin i yang dinyatakan pada MVA base (SB).
Jika HGi adalah konstanta inersia pada mesin i yang dinyatakan pada base mesin, maka konstanta inersia perlu diubah dan dinyatakan dengan persamaan sebagai berikut :
𝐻𝑖= 𝑆𝐺𝑖 𝑆𝐵
𝐻𝐺𝑖 (2.56)
Daya elektrik dari generator I pada saat gangguan dan mentransformasi persamaan (2.55) menjadi pemodelan state variable menjadi : 𝑑 𝛿𝑖 𝑑𝑡 = ∆ 𝜔𝑖 𝑖 = 1,2, … , 𝑚 (2.57) 𝑑 ∆𝜔𝑖 𝑑𝑡 = 𝜔𝑠 2𝐻𝑖 ( 𝑃𝑚− 𝑃𝑒 𝑓 ) (2.58)
Persamaan (2.57) dan (2.58) adalah dua persamaan untuk masing – masing generator, dengan sudut daya mula 𝛿𝑖0dan ∆𝜔𝑖0= 0. Metode Runge Kutta merupakan metode yang digunakan untuk menghitung persamaan diferensial diatas. Ketika gangguan pada jaringan hilang, maka melibatkan penghilangan saluran yang terjadi gangguan, matrix admitansi bus dihitung kembali untuk merepresentasikan gangguan pada jaringan. Mengevaluasi matrik admitansi bus reduksi setelah gangguan dan daya elektrik setelah gangguan pada generator I dinyatakan dengan 𝑃𝑖𝑝𝑓 yang sudah dinyatakan dengan persamaan (2.53). Simulasi dilanjutkan dengan enggunakan daya setelah gangguan untuk menentukan kestabilan dari system multimesin tersebut.
2.6.2. Diagram Aliran Stabilitas Transien
Untuk mempermudah memahami konsep dari analisis kestabilan transien multimesin, maka dibuat flowchart diagram aliran stabilitas transien. Digram flowchart ini merepresentasikan simulasi menggunakan
25
Menghitung aliran daya (load flow) Start
1. Input data sistem Jamali 2019 (saluran, aliran daya,
pembangkitan dan pembebanan) 2. Input data impedansi
masing – masing bus
Cek Data Sesuai Standart
3. Input data pada generator (Xd' dan H)
Menghitung matriks admitansi bus (Ybus) sebelum gangguan (prefault)
Matriks Ybus prefault (Ybusbf)
Input bus I (bus yang terjadi
gangguan)
1 Ya
26
1
Input saluran bus ke bus yang akan dihilangkan
Menghitung matriks admitansi bus (Ybus) selama gangguan (faulted)
Matriks Ybus during fault (Ybusdf)
Menghitung matriks admitansi bus (Ybus) saat terjadi gangguan (post fault)
Menghitung reduksi matriks Ybus prefault (Ybusbf), faulted (Ybusdf), postfault (Ybusaf)
Input waktu pemutusan (time clearing)
Menghitung daya mekanik (Pm) dan daya elektrik (Pe) pada setiap generator saat
prefault, faulted, dan postfault
Plot kurva ayunan (swing equation)
Cek wakti kritis (CCT)
Selesai
Tidak
Ya
27 2.7. Time Domain Simulation (TDS)
Waktu yang diijinkan untuk memutus gangguan agar generator tidak mengalami lepas sinkron merupakan Critcal Clearing Time (CCT). Metode yang dipakai untuk menentukan CCT adalah metode Time
Domain Simulation (TDS) dengan sebagai pedomannya adalah perubahan
sudut rotor generator ketika terjadi gangguan dalam sistem, selain itu juga menganalisis adanya pengaruh damping dalam kestabilan sistem. Metode TDS dilakukan dengan simulasi menggunakan software MATLAB. Hasil simulasi menunjukkan bahwa adanya damping di dalam sistem menyebabkan membuat sistem lebih stabi. Sehingga nilai CCT antara sistem yang ber-damping lebih besar nilainya daripada sistem yang tidak menggunakan damping [8].
2.8. Critical Clearing Time (CCT)
Pemutusan waktu kritis atau Critcal Clearing Time (CCT) adalah waktu sistem tenaga listrik memutuskan gangguan dengan waktu kritis diantara keadaan stabil dan tidak stabil dengan melihat sudut rotor pada generator untuk bisa tetap sinkron dalam sistem interkoneksi. Sistem akan stabil apabila gangguan dihilangkan sebelum waktu kritis, dan sistem tidak stabil apabila gangguan dihilangkan melebihi waktu kritis sehingga dapat lepas dari sistem tersebut [6].
Meningkatkan torsi input sampai sudut rotor lebih dari 90º akan menyebabkan slip pole dan kehilangan sinkronisasi dengan sistem tenaga listrik tersebut. Gangguan sudut rotor dapat berhenti apabila sudut rotor lebih dari 90º. Slip pole disebabkan keadaan transien ayunan sudut rotor bisa lebih dari 180º. Apabila gangguan tidak segera dihilangkan maka mesin akan terus terjadi slipping pole dan generator akan keluar dari sinkronisasi dengan sistem tenaga listrik tersebut [6].
2.9. Metode Biseksi
Untuk mentukan solusi akar dari persamaan non linear atau disebut juga metode pembagian interval menggunakan metode biseksi. Metode biseksi untuk mencari akar-akar persamaan non linear melalui proses iterasi, dengan prinsip utama menggunakan dua buah nilai awal untuk mengurung salah satu atau lebih akar persamaan non linear. Nilai akarnya ditebak melalui nilai tengah antara dua nilai awal yang ada [7].
28
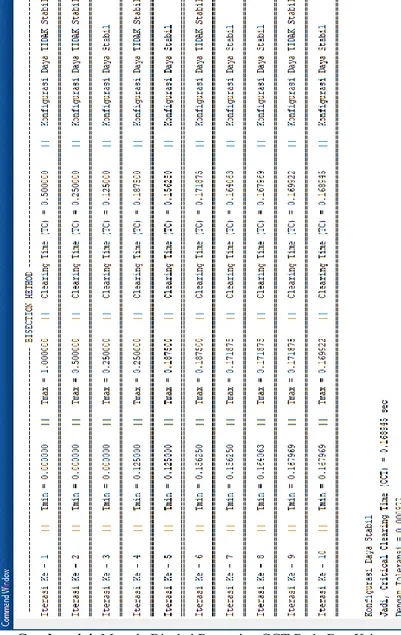
Hal pertama dalam metode biseksi adalah menentukan batas bawah (a) dan batas atas (b) serta toleransi yang diinginkan.
TC =( 𝑇𝐶𝑚𝑎𝑥 − 𝑇𝐶𝑚𝑖𝑛)
2 + 𝑇𝐶𝑚𝑖𝑛 (2.59) Metode biseksi pada pencarian nilai Critical Clearing Time (CCT) yang dikombinasikan dengan metode Time Domain Simulation kali ini dapat direpresentasikan oleh gambar 2.9. Sesuai dengan gambar tersebut, simulasi pencarian nilai TC akan terus dilakukan dengan toleransi yang diinginkan serta batasan – batasan, yaitu TCmin sebagai batas minimum dan TCmax sebagai batasan maksimum. Nilai TC dinyatakan pada persamaan (2.60) diatas. Konsepnya sebagai berikut : Jika nilai TC belum sesuai dengan toleransi dan sistem masih dalam
keadaan tidak stabil, maka nilai TC yang baru tersebut menjadi batas maksimum (TCnew = TCmax) dan TCmin tetap menjadi batasan minimum.
Jika nilai TC belum sesuai dengan toleransi meskipun system sudah dalam keadaan stabil, maka nilai TC yang baru tersebut menjadi batas minimum (TCnew = TCmin) dan TCmax tetap menjadi batasan maksimum.