LANDASAN TEORI
2.1 Pemrosesan Sinyal
Menurut Proakis et al. (1997), umumnya suatu segmen suara dapat dinyatakan dengan derajat ketelitian yang tinggi sebagai jumlah dari beberapa sinusoida dengan amplitudo dan frekuensi yang berbeda. Secara fakta, salah satu cara untuk menginterpretasikan isi informasi atau pesan yang disampaikan dengan setiap segmen waktu yang pendek dari sinyal suara adalah dengan mengukur amplitudo, frekuensi, dan fase yang terdapat dalam segmen waktu sinyal yang pendek.
2.1.1 Downsampling
Downsampling adalah proses mereduksi jumlah data yang besar
akibat nilai sampling rate yang besar, sehingga menghasilkan data dengan tingkat frekuensi yang lebih rendah. Dalam keadaan pasti, downsampling tidak menimbulkan pengaruh merugikan pada performa pembelajaran dan klasifikasi dan secara simultan mereduksi waktu ekstraksi fitur.
Pemroses downsampling mereduksi sampling rate sinyal oleh faktor M bertipe integer. Sinyal output y(m) disebut sinyal
ter-downsampling dan diperoleh dengan mengambil hanya setiap nilai ke-M
dari sinyal input.
2.1.2 Transformasi Wavelet
Menurut Edwards ( 1991 ), Wavelet adalah fungsi orthogonal yang dapat di aplikasikan pada kumpulan data yang terbatas. Tidak seperti transformasi Fourier, yang membagi – bagi sinyal menjadi bebrapa komponen frekuensi, transformasi wavelet menggunakan template untuk memilih bentuk wave yang mirip dengan sinyal aslinya.
Setiap elemen dalam wavelet dikontruksi dari bentuk asli yang sama yang dinamakan mother wavelet ( wavelet induk ). Dalam gabungan
wavelet ( sinyal natural ), elemen – elemennya merupakan replica terskala
waktu ( terdilatasi atau terkompresi ) dan tertranslasi waktu ( tergeser pada sumbu X ) dari prototype atau fungsi induk wavelet Y(t).
Wavelet terbentuk menggunakan filter high-pass dan low-pass.
Transformasi induk dihasilkan dari dilatasi dan translasi prototype fungsi
bandpass. Transformasi wavelet mengizinkan dekomposisi ke dalam
jumlah sinyal resolusi rendah ( frekuensi rendah ) ditambah elemen detail ( resolusi tinggi ). Menurut Edwards ( 1991 ) fungsi penyaring low-pass dan high-pass adalah sebagai berikut :
∑
∑
= + + = + = − = − N j j j f pass High f pass Low 1 2i -2 j 1 j 1 N 1 j 1 j -2i 1 c 1) - ( 2 1 b c 2 1 a dimana :N = jumlah blok input c = koefisien
f = nilai input a dan b = nilai output j = variabel pencacah blok input
Gambar 2.1 Ilustrasi Pohon Penyaring Low-pass dan High-pass Transformasi fourier mempunyai fungsi yang berbeda dari transformasi wavelet. Perbedaan utamanya adalah transformasi fourier memisahkan atau membagi sinyal kedalam bentuk sinus atau cosinus, sedangkan wavelet membuat template untuk digunakan dalam perbandingan dengan sinyal aslinya. Trasformasi wavelet dapat dirumuskan sebagai berikut :
∫
∞∞=
- f(x)Ck(a,b)( )dx
b)
F(a, x
Dimana Ck adalah fungsi yang dapat berbeda - beda tergantung dari aturan yang digunakan. Contoh dari koefiesien Ck dan gambar wave
yang dihasilkan dapat dilihat dari gambar berikut ini.
Gambar 2.2 Koefisien dan Grafik dari fungsi Haar (a) dan Daubechies (b)
2.1.3 Entropi
Ide teoritis informasi dari entropi adalah perluasan dari ide fisika. Terdapat banyak cara untuk menjelaskan entropi. Entropi merupakan ukuran keacakan dari variabel acak. Entropi merupakan ukuran dari jumlah informasi variabel acak atau isi proses stokastik. Entropi juga merupakan batas bawah pada jumlah pesan yang dapat dikompresi. Dan akhirnya entropi merupakan nilai rata-rata pertanyaan ya atau tidak yang harus dijawab mengenai entitas acak untuk menentukan nilainya. (Saia)
Menurut Thompson, entropi – ide yang lahir dari termodinamika klasik – merupakan entitas kuantitatif, bukan kualitatif. Hal itu berarti entropi bukan sesuatu yang berdasar intuisi, melainkan sesuatu yang didefinisikan melalui sebuah persamaan.
Entropi dan metrika teoritis informasi terkait digunakan secara luas dalam aplikasi kecerdasan buatan yang melakukan permodelan stokastik seperti pengenalan ucapan, pengenalan pola, diagnosis medis, dan pemodelan finansial. (Saia)
2.2 Pengertian Jaringan Syaraf Manusia
Jaringan Syaraf Manusia adalah gabungan sel – sel syaraf manusia yang membentuk suatu jaringan dan mampu untuk mengolah berbagai sumber informasi. Pada jaringan syaraf manusia terdapat sel syaraf yang terkecil yang disebut neuron. Neuron dapat menerima berbagai masukan yang kemudian akan memberikan respon keluaran berupa rangsangan elektrik yang diteruskan pada
neuron yang lain. Jaringan syaraf manusia mempunyai antara 1010 sampai
dengan 1012 neuron, dan setiap neuronnya mampu berisi jumlah informasi, hal
ini berarti otak manusia merupakan suatu gudang memori yang sangat luas.
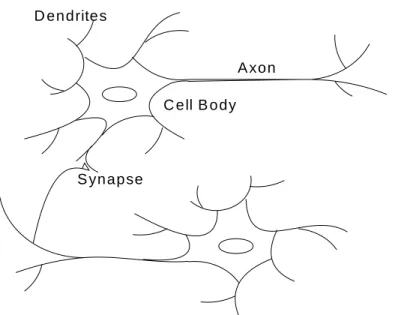
Neuron terdiri atas badan sel yang berisi inti sel, nukleus dan sejumlah
benang halus. Benang halus ini terdiri dari dua bagian yaitu dendrit dan akson,
dendrit berfungsi sebagai pembawa pesan untuk badan sel, sedangkan akson
berfungsi sebagai penerima dan titik pertemuan antara dendrit dan akson disebut
sinapsis. A xon C e ll B o dy D en drite s S yn ap se Satrio D ew anto, 2004
2.3 Jaringan Syaraf Tiruan
2.3.1 Sejarah Jaringan Syaraf Tiruan
Jaringan Syaraf Tiruan pertama kali diperkenalkan oleh Warren McCulloch dan Wolter Pitts pada tahun 1943. McCulloch adalah seorang fisikawan dan ahli bedah syaraf yang masih dalam tahap pembelajaran. Sedangkan Pitts adalah seorang ahli matematika yang bergabung dengan McCulloch pada tahun 1942. Dalam penelitian, mereka mendeskripsikan logika kalkulus dari jaringan syaraf tiruan yang menggabungkan pembelajaaran psikologi neuron dan logika matematika. Model yang dihasilkan adalah hukum “all – or - none”. Hasil penelitian mereka kemudian digunakan di University of Chicago untuk kurang lebih 5 tahun dari tahun 1943.
Setelah hasil penelitian mereka beredar luas di masyarakat, jaringan syaraf tiruan mendapat banyak perhatian dari berbagai kalangan ilmuwan, sehingga jaringan syaraf tiruan ini berkembang dengan pesat dan disertai dengan diterbitkannya berapa buku, salah satunya adalah
Cybernatics oleh Wiener’s pada tahun 1948, yang berisi tentang konsep
penting untuk kontrol, komunikasi, dan statistik proses sinyal. Pada tahun 1954, Minsky membuat tesis bertema jaringan syaraf tiruan dengan judul “Theory of Neural – Analog Reinforcement Systems and Its Application to
the Brain – Model Problem”.
Perkembangan jaringan syaraf tiruan sempat terhenti karena sulitnya melatih jaringan berlapis dan belum adanya algoritma untuk membantu penyelesain masalah tersebut. Pada tahun 1950, Taylor
memperkenalkan associative memory yang diikuti dengan cara pembelajaran dengan matriks. Setelah itu banyak bermunculan metode – metode lain yang digunakan dalam jaringan syaraf tiruan, misalnya pada tahun 1958, Rosenblatt mempublikasikan pendekatan baru untuk menyelesaikan masalah dalam jaringan syaraf tiruan yang diberi nama
Perceptron, sebuah metode dari supervised learning, kemudian muncul competitive learning, Aadaptive Resonance Theory ( ART ), dll.
2.3.2 Pengertian Jaringan Syaraf Tiruan
Jaringan syaraf tiruan adalah jaringan yang di desain menyerupai otak manusia yang digunakan untuk suatu tugas atau fungsi yang diinginkan. Sebuah neuron dalam jaringan syaraf tiruan memiliki : dendrit ( sebagai input ), tubuh sel, dan axon ( sebagai output ). Dalam otak manusia, sebuah neuron mengkoleksi sinyal – sinyal dari neuron lainnya melalui struktur yang disebut dendrit. Neuron mengirim aktivitas elektrik melalui jaringan tipis dan panjang yang diketahui sebagai sebuah
axon, yang terbagi dalam ribuan cabang. Pada akhir dari setiap cabang,
sebuah struktur sinapsis mengkonversi aktivitas pada neuron yang terkoneksi. Pembelajaran tampak oleh perubahan efektifitas sinapsis sehingga terjadi perubahan pengaruh antara neuron yang satu dengan lainnya. Jaringan syaraf tiruan biasanya diimplementasikan dengan menggunakan komponen elektronik atau disimulasikan dengan software dalam komputer.
2.3.3 Arsitektur jaringan
Cara bagaimana neuron - neuron dalam neural networks terstruktur, adalah terhubung erat dengan pembelajaran algoritma menggunakan pelatihan jaringan. Secara umum terdapat tiga tipe kelas berbeda yang mendasari arsitektur jaringan :
1. Single Layer Feedforward Networks.
Dalam sebuah jaringan syaraf tiruan yang berlapis, neuron –
neuron - nya terorganisasi kedalam bentuk layer atau lapisan -
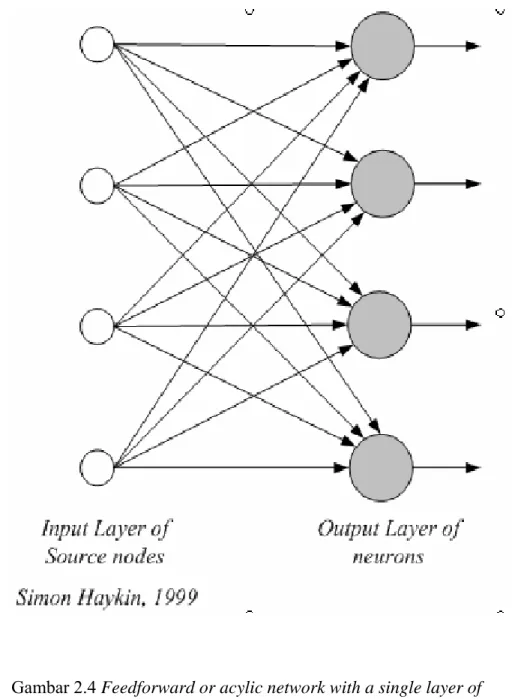
lapisan. Bentuk yang paling sederhana dari lapisan jaringan adalah jaringan yang hanya mempunyai satu masukkan ( input layer ) dari titik ( node ) sumber yang diteruskan ke sebuah lapisan keluaran ( output layer ) dari neuron-neuron, tapi tidak akan terjadi sebaliknya. Dengan kata lain jaringan ini hanya bersifat feedforward atau tipe
acyclic. Contoh dari single layer feedforward networks dapat dlihat
dari gambar 2.4. Dalam gambar tersebut terdapat empat buah node baik pada input maupun output, tetapi hanya ada satu keluaran dari setiap node output hanya satu. Jaringan ini tidak menghitung input
layer dari sumber titik, karena tidak ada perhitungan yang dilakukan
Gambar 2.4 Feedforward or acylic network with a single layer of
neurons
2. Multilayer FeedForward Networks.
Kelas kedua dari umpan maju neural networks adalah adanya
perbedaan kehadiran satu atau lebih lapisan yang tersembunyi ( hidden layer ), yang mana pemrosesan node - node-nya disebut dengan neuron tersembunyi atau unit yang tersembunyi. Fungsi dari
neuron - neuron yang tersembunyi adalah untuk melakukan
interferensi pada saat antara masukkan eksternal dengan keluaran jaringan dalam beberapa cara yang berguna. Dengan menambah satu atau lebih lapisan tersembunyi, maka jaringan akan mampu meng-ekstrak perintah statistik yang lebih tinggi, hal itu dapat terjadi bila ukuran dari lapisan masukkan juga besar.
Node - node sumber dari jaringan lapisan masukkan
menyediakan masing - masing pola elemen pengaktifan ( input
vector ), yang mendasari sinyal-sinyal masukkan terhubung ke lapisan
ke dua ( hiddenlayer ). Sinyal - sinyal keluaran dari lapisan ke dua akan digunakan sebagai masukkan untuk lapisan ketiga. Secara umum
neuron - neuron pada setiap lapisan pada jaringan mempunyai inputnya masing-masing dari lapisan yang terdahulunya yang
merupakan keluarannya. Sinyal - sinyal keluaran pada neuron-neuron lapisan terakhir dari sebuah jaringan, mendasari keseluruhan respon dari jaringan untuk mengaktivasi pola yang disediakan oleh
node-node input pada lapisan masukkan yang pertama kali.
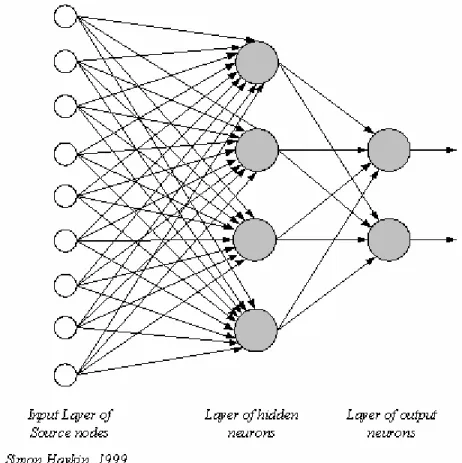
Contoh jaringan multilyaer feedforward netwoork ditunjukkan pada gambar 2.5. Gambar tersebut disebut sebagai fully connected, hal ini ditunjukkan dengan terhubungnya setiap node dari setiap lapisan jaringan dengan node pada lapisan berikutnya. Tetapi jika ada satu atau beberapa hubungan komunikasi hilang dari jaringan, jaringan ini disebut partially connected.
Gambar 2.5 Fully connected feedforward or acylic network with on
hidden layer and one output layer
3. Recurrent Networks.
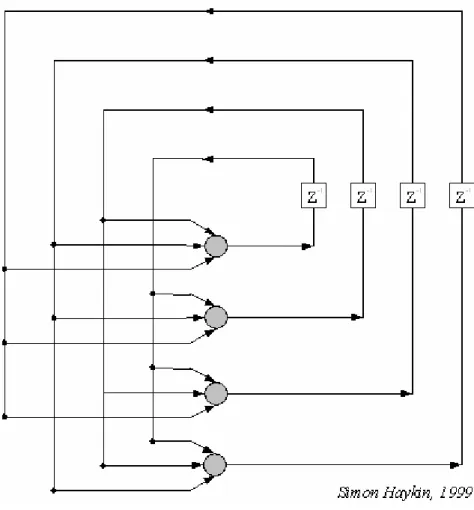
Merupakan sebuah neural networks yang dibedakan dengan tipe kelas umpan maju dimana, pada kelas ketiga ini mempunyai loop umpan balik Sebagi contoh sebuah jaringan recurrent boleh hanya terdiri dari sebuah lapisan neuron neuron saja, yang setiap neuron -nya memberikan umpan balik si-nyal keluaran-nya ke si-nyal masukkan pada seluruh neuron yang lain. Hal ini ditunjukkan pada gambar 2.6.
Gambar 2.6 Recurrent network with no self feedback loops and no
hidden neurons
Pada gambar 2.6. tidak terdapat umpan balik yang terjadi dengan sendirinya (self feedback loop), umpan balik seperti ini hanya akan terjadi pada jaringan yang memiliki neuron dimana sinyal keluarannya hanya diumpan balik pada masukkan neuron itu sendiri dan bukan diberikan pada sinyal masukkan neuron-neuron lainnya termasuk neuron itu sendiri.
2.3.4 Karakteristik Jaringan
Terdapat 4 karaktesistik jaringan yang harus dispesifikasi untuk diimplementasikan pada jaringan syaraf tiruan, yaitu :
1. Number and type of input
Pemilihan input untuk jaringan syaraf tiruan mirip dengan pemilihan klasifikasi sistem. Pemilihan ini harus mendukung informasi yang dibutuhkan untuk membuat keputusan dalam jaringan. 2. Connectivity of the network
Berhubungan dengan besar jaringan. Yaitu jumlah lapisan yang tersembunyi dan jumlah node pada setiap lapisan antara input dan
output. Dalam jaringan syaraf tiruan tidak ada batasan seberapa besar
atau kecilnya lapisan yang harus digunakan. Jika lapisan terlalu besar maka akan sulit melakukan pelatihan pada jaringan, sedangkan jika lapisan terlalu kecil, jaringan mungkin tidak dapat mengklasifikasikan semua input yang diinginkan dengan akurat.
3. choice of offset
Pemilihan offset harus dilakukan untuk setiap elemen perhitungan sebagai bagian dari prosedur pelatihan, hal ini dilakukan untuk mencari hubungan antara bobot dan offset
4. choice of nonlinearity
Pengalaman dibutuhkan untuk memilih ketidak –linier -an yang tepat. Hal ini tidak terlalu penting dalam jaringan, tetapi ketidak – linier-an ini harus bersifat kontinyu dan berubah – ubah agar algoritma dalam pelatihan dapat digunakan
2.3.5 Metode Jaringan Syaraf Tiruan Propagasi Balik
Metode propagasi balik merupakan generalisasi dari algoritma LMS yang dapat digunakan untuk melatih jaringan multilayer. Propagasi balik juga merupakan pendekatan dari algoritma steepest descent dimana indeks kinerja berupa Mean Square Error. Perbedaan antara algoritma LMS dengan propagasi balik terletak pada cara untuk menghitung turunan. Pada jaringan linier dengan satu lapis ( single layer ), error merupakan fungsi linier dari bobot jaringan dan turunan terhadap bobot dapat dengan mudah dihitung. Pada jaringan multilayer dengan fungsi aktivasi non linier hubungan antara bobot dan error menjadi kompleks, sehingga untuk mendapatkan turunan harus menggunakan aturan rantai.
Gambar 2.7 Arsitektur Jaringan Backpropagation
Algoritma pelatihan jaringan syaraf tiruan propagasi balik adalah sebagai berikut :
• Inisialisasi bobot ( ambil bobot awal dengan nilai random yang cukup kecil ).
• Tetapkan maksimum epoh, target error, dan learning rate ( α )
• Kerjakan langkah - langkah berikut selama ( epoh<maksimum epoh ) dan ( MSE > target error ) :
1. Epoh = Epoh + 1
2. Untuk tiap – tiap pasangan elemen yang akan dilakukan pelatihan, kerjakan :
1) Feedforward :
a. Masing - masing unit input ( Xi, i = 1,2,3,...,n) menerima
sinyal xi dan meneruskan sinyal tersebut ke semua unit
pada lapisan yang ada di atasnya ( lapisan tersembunyi ). b. Masing – masing unit pada suatu lapisan tersembunyi ( Zj,
j = 1,2,3,...,p) menjumlahkan sinyal – sinyal input berbobot
∑
= + = n 1 i ij i j j b1 x v z_indan gunakan fungsi aktivasi untuk menghitung sinyal
output zj =f(z_inj)
kemudian kirimkan sinyal tersebut ke semua unit di lapisan atas ( unit – unit output ).
Langkah ini dilakukan sebanyak jumlah lapisan tersembunyi.
c. Masing – masing unit output ( Yk, k = 1,2,3,...,m )
menjumlahkan sinyal – sinyal input berbobot
∑
= + = p 1 i jk i k k b2 z w y_indan gunakan fungsi aktivasi untuk menghitung sinyal
output yk =f(y_ink)
2) Backpropagation
a. Masing – masing unit output ( Yk, k = 1,2,3,...,m )
menerima pola target yang berhubungan dengan pola input pelatihan, menghitung informasi kesalahan
) y_in ( f ) y -(t 1 k k k k = δ
kemudian menghitung koreksi bobot ( digunakan untuk memperbaiki nilai w ) jk Δwjk =αδk zj, dan menghitung koreksi bias ( digunakan untuk memperbaiki nilai b2k )
k k
b2 =αδ Δ
Langkah ini dilakukan sebanyak jumlah lapisan tersembunyi, yaitu menghitung informasi kesalahan dari suatu lapisan tersembunyi ke lapisan tersembunyi sebelumnya.
b. Masing – masing unit tersembunyi ( Zj, j = 1,2,3,...,p )
∑
= = m 1 k jk k j w _in δ δkemudian mengalikan nilai tersebut dengan turunan dari fungsi aktivasi untuk menghitung informasi kesalahan
) (z_in f _in 1 j j j δ
δ = , menghitung koreksi bobot ( untuk
memperbaiki nilai v ) ij Δvij =αδj xi, menghitung koreksi bias ( untuk memperbaiki nilai b1j ) Δb1j=αδj.
3) Memperbaiki bobot dan bias
a. Masing – masing unit output ( Yk, k = 1,2,3,...,m )
memperbaiki bias dan bobot ( j = 1,2,3,...,p ) :
jk jk jk (baru) w (lama) w w = +Δ k k k (baru) b2 (lama) b2 b2 = +Δ
b. Masing – masing unit tersembunyi ( Zj, j = 1,2,3,...p)
memperbaiki bias dan bobot ( i = 0,1,2,...,n) :
ij ij ij(baru) v (lama) v v = +Δ j j j(baru) b1 (lama) b1 b1 = +Δ • Hitung MSE
2.3.6 Kelebihan Jaringan Syaraf Tiruan
Kemampuan neural networks dalam memperoleh daya komputasi yang baik dalam pendefinisisan, pengklasifisian, dan pengolahan adalah hal yang nyata. Hal ini dapat dilakukan karena dua sebab, yaitu :
2. Kemampuan untuk mempelajari dan menyederhanakan-nya.
Penyederhana-an yang terdapat pada neural networks adalah menghasilkan keluaran atau outputs yang wajar atau sesuai untuk input yang tidak diulang atau diberi feedback selama pembelajaran atau
training.
Dalam pelatihan, neural networks tidak dapat menyediakan pemecahan atau solusi dengan hanya bekerja sendiri, melainkan membutuhkan suatu pendekatan sistem engineering ( rancang bangun ) yang terpadu secara konsisten. Dimana bila diberikan suatu permasalahan sulit yang dikehendaki, maka secara spesifik akan disusun ulang menjadi permasalahan - permasalahan yang relatif mudah, dan neural networks akan ditugaskan, yang mana sebuah subset ( struktur ) tertentu akan mengerjakan permasalahan sesuai dengan kemampuannya.
Kelebihan Jaringan Syaraf Tiruan : 1. Nonlinearity.
Neurons tiruan dapat berbentuk linear atau nonlinear. Dan
neural networks merupakan nonlinearity saat melakukan hubungan
nonlinear antara neuron - neuron, terlebih merupakan bentuk khusus yang disebarkan dalam jaringan, nonlinearity merupakan bentuk yang teramat penting dimana pada saat tertentu mendasari mekanisme fisik yang bertanggung jawab untuk penyederhanaan sinyal input
nonliniear yang tidak dapat dipisahkan.
Merupakan sebuah paradigma pembelajaran yang disebut
supervised learning, dimana melibatkan modifikasi dari beban synaptic jaringan syaraf tiruan dengan menerapkan seperangkat
contoh pelatihan yang telah dinamai. Sinyal input yang diambil oleh
neural networks dari perangkat adalah acak, dimana beban synaptic
( parameter bebas ) dimodifikasi agar dapat menghasilkan keadaan yang stabil dimana tidak terjadi lagi perubahan yang signifikan. Perancangan input - output mapping merupakan salah satu pendekatan untuk menangani permasalahan yang datang, seperti
nonparamertic statistical inference, yang merupakan pendekatan
yang membutuhkan atau mensyaratkan pendugaan secara sekehendaknya pada batasan-batasan ketentuan pada ruang sinyal input, untuk pengklasifikasian pola contoh atau tugas yang menggunakan seperangkat contoh tanpa menimbulkan sebuah kemungkinan dari model yang tersebar atau terdistribusi.
3. Adaptivity.
Merupakan kemampuan neural networks untuk mengubah beban synaptic terhadap perubahan yang terjadi pada keadaan sekitarnya. Neural Networks dapat beradaptasi untuk
pengklasifikasian pola, pengolahan sinyal, dan pengaturan aplikasi-aplikasi, dimana beban synaptic dapat diatur secara realtime bila bekerja pada nonstationary environment. Dimana dimungkinkan bahwa semakin adaptive sebuah system, dengan meyakinkan setiap waktu sistem akan bekerja stabil, maka akan semakin sempurna
ke-efektifan atau performansi suatu sistem bila bekerja pada
nonstationary environment. Sebagai contoh keunggulan adaptive,
adalah sebuah sistem harus merespon cukup jauh mengabaikan gangguan palsu dan merespon secara singkat perubahan-perubahan yang berarti pada keadaan yang sekitarnya.
4. Evidential Response.
Pada penjelasan pengklasifikasian pola sebuah neural
networks dapat dibentuk untuk menghasilkan informasi yang tidak
hanya pada pola tertentu saja yang dipilih, tetapi juga mengenai bagaimana keputusan atau ketentuan dibuat. Dimana informasi tersebut selanjutnya digunakan untuk menolak pola yang tidak wajar, sehingga memperbaiki performansi suatu sistem neural networks. 5. Contextual Information.
Pengetahuan dihasilkan oleh struktur dan keadaan aktif dari sebuah neural networks. Setiap neuron dipengaruhi secara global oleh
neuron - neuron lainnya pada jaringan, konsekuensinya contextual information selalu berhadapan secara alami dengan neural networks.
6. Fault Tolerance.
Sebuah neural networks diterapkan pada bentuk hardware, dimana secara potensial akan memiliki toleransi kesalahan yang sulit dipisahkan. Dimana mempunyai prinsip, melakukan penurunan performansi secepatnya daripada menunggu atau beroperasi sampai terjadinya kesalahan yang sangat besar.
Pararel acak yang alami dari sebuah neural networks mempunyai kemampuan potensial yang cepat untuk mengerjakan permasalahan - permasalahan tertentu, dan seuai untuk penerapan pada teknologi VLSI ( Very Large Scale Integrated), untuk penangkapan sifat yang rumit pada pertunjukan yang sangat hirarkis. 8. Uniform of Analysis and Design.
Neuron - neuron dalam satu bentuk atau berbeda akan mewakilkan sifat – sifat yang umum terdapat pada semua neural
networks. Sifat yang umum tersebut memungkinkan untuk saling
berbagi teori dan algoritma pembelajaran dalam aplikasi-aplikasi
neural networks yang berbeda.
9. Neurobiological Analogy.
Pembuatan neural networks dimotivasi oleh cara kerja otak manusia. Neurobiologist melihat neural networks sebagai alat penelitian untuk menggambarkan fenomena neurobiologcal. Sedangkan para engineers melihat neurobiology sebagai ide-ide baru untuk menyelesaikan masalah-masalah yang lebih rumit dibandingkan dengan teknik konvensional yang menggunakan kabel.
2.3.7 Hal Yang Perlu Diperhatikan Dalam Jaringan Syaraf Tiruan
Dalam pelatihan jaringan syaraf tiruan, terdapat beberapa hal yang pelu diperhatikan, yaitu:
1. Jaringan syaraf tiruan memiliki kemungkinan untuk gagal dalam mendapatkan solusi yang memuaskan terhadap suatu masalah.
Mungkin ini disebabkan tidak adanya fungsi yang dapat dipelajari atau jumlah data yang tidak mencukupi.
2. Jaringan syaraf tiruan tidak dapat menjelaskan jawaban yang dikeluarkannya. Dalam satu hal, jawaban terhadap suatu masalah bergantung pada ribuan proses perhitungan yang melibatkan pola input dan bobot-bobot sambungan. Melihat bagaimana bobot-bobot tersebut menjadi “penyebab” suatu solusi akan lebih rumit daripada melihat bagaimana suatu program komputer bekerja. Di lain hal, nilai bobot - bobot itu sendiri merupakan hasil dari prosedur mesin-belajar ( machine-learning ) yang rumit dan susah untuk dijelaskan.
3. Melatih jaringan syaraf tiruan bisa lambat dan mahal. Hal ini menyangkut biaya yang dikeluarkan untuk keperluan mengumpulkan, menganalisis, dan memanipulasi data serta biaya eksperimen -eksperimen terhadap parameter-parameter yang dilakukan untuk mendapatkan nilai - nilai parameter yang dilakukan untuk mendapatkan nilai - nilai parameter yang baik. Salah satu cara untuk mempercepat proses latihan jaringan syaraf tiruan adalah mengkombinasikannya dengan perangkat keras paralel yang dapat menjalankan eksperimen dengan cepat.
4. Kecepatan proses perhitungan jaringan syaraf tiruan akan bertambah lambat bersamaan dengan bertambahnya jumlah simpul-simpul dalam jaringan syaraf tiruan. Hal ini terjadi karena waktu eksekusi secara langsung bergantung pada jumlah simpul-simpul dalam jaringan syaraf tiruan.
2.4 Motor Stepper
Stepper motor adalah salah satu tipe motor yang sangat popular digunakan sebagai penggerak atau pemutar peralatan industri. Prinsip kerja stepper motor ini mirip dengan DC motor, yaitu sama-sama dicatu dengan tegangan DC untuk memperoleh medan magnet. Bila DC motor memiliki magnet tetap pada stator, stepper motor mempunyai magnet tetap pada rotor. Suatu stepper motor biasanya cukup dinyatakan dengan spesifikasi : “berapa phasa “, “berapa derajat perstep”, “berapa volt tegangan catu untuk tiap lilitan” dan berapa ampere atau miliampere arus yang dibutuhkan untuk tiap lilitan”. Motor stepper bergerak secara per step sesuai dengan spesifikasinya, dan bergerak dari satu step ke step berikutnya memerlukan waktu.
Motor stepper juga memiliki karakteristik yang lain yaitu holding torque, yang tidak dimiliki oleh motor DC. Holding torque memungkinkan motor stepper dapat menahan posisinya ketika tidak berputar. Hal ini sangat berguna untuk aplikasi dimana suatu system memerlukan keadaan start dan stop.
Motor stepper mempunyai beberapa lilitan dimana lilitan - lilitan tersebut harus dicatu ( tegangan ) dahulu dengan suatu urutan tertentu agar dapat berotasi. Membalik urutan pemberian tegangan tersebut akan menyebabkan putaran motor stepper yang berbalik arah. Jika sinyal kontrol tidak terkirim sesuai dengan perintah maka motor stepper tidak akan berputar secara tepat, mungkin hanya akan bergetar dan tidak bergerak. Untuk mengontrol motor stepper biasanya kita
menggunakan suatu rangkaian driver yang menangani kebutuhan arus dan tegangan.
Menurut Alfian ( 2005 ), karakteristik dari motor stepper adalah sebagai berikut:
• Voltage
Tiap motor stepper mempunyai tegangan rata - rata yang biasanya tertulis pada tiap unitnya atau tercantum pada datasheet masing - masing motor stepper. Tegangan rata - rata ini harus diperhatikan dengan seksama karena bila melebihi dari tegangan rata - rata ini akan menimbulkan panas yang terlalu besar pada motor stepper yang menyebabkan kinerja putarannya tidak maksimal atau bahkan motor stepper akan rusak dengan sendirinya
• Resistance
Resistance per winding adalah karakteristik yang lain dari motor stepper. Resistance ini akan menentukan arus yang mengalir, selain itu juga akan
mempengaruhi torsi dan kecepatan maksimum dari motor stepper.
• Degrees per step
Derajat per step adalah faktor terpenting dalam pemilihan motor stepper sesuai dengan aplikasinya. Tiap - tiap motor stepper mempunyai spesifikasi masing - masing, antara lain: 0.720 per step, 1.80 per step, 3.60 per step, 7.50 per step, 150 per step, dan bahkan ada yang 900 per step.