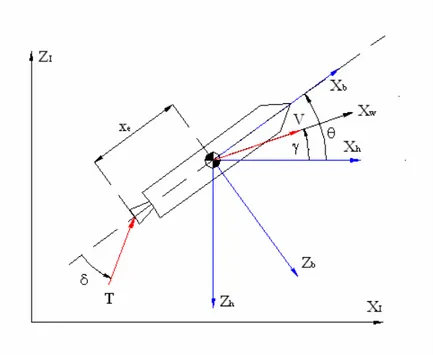
2.1 Persamaan Gerak Roket dalam Ruang Tiga Dimensi
Teks penuh
Gambar
Dokumen terkait
Jika dibandingkan dengan nilai koefisien determinasi model pertama yang hanya sebesar 13,84% maka dapat disimpulkan bahwa penambahan variabel kepuasan kerja dan
Dengan memperhatikan visi dan misi tersebut, tujuan dan sasaran Pusat Penelitian dan Pengembangan Perkebunan tahun 2010-2014 adalah : (1) mendukung pemenuhan
The EPITHELIAL LAYER of the mucous membrane of the MOUTH, PHARYNX, ESOPHAGUS, & ANAL CANAL is composed of NONKERATINIZED STRATIFIED SQUAMOUS EPITHELIUM The epithelium
Transportasi ojek sudah lama ada di indonesia. Namun demikian, saat ini ojek mengalami perubahan dengan memanfaatkan teknologi internet.Oleh karena itu,
D'après ces résultats, on peut conclure que la fonction du langage est le plus souvent trouvé ou utilisé dans la chanson est une fonction Emotive (63) et le moins découvert
Hasil sosiometri dan observasi instrumen skala penilaian interaksi sosial yang diperoleh tersebut, didukung dengan palaksanaan wawancara yang dilakukan peneliti kepada guru BK SMA N
Berkaitan dengan pengelolaan kebun dan perawatan tanaman, dimana setiap tahapan pertumbuhan tanaman memerlukan perawatan dan nutrisi yang spesifik sesuai dengan fokus
Berdasarkan beberapa pengertian di atas, maka maksud judul penelitian ini adalah suatu usaha/ proses yang ditujukan untuk meningkatkan hasil belajar siswa kelas V di MI
