BAB II
LANDASAN TEORI
2.1 Industrial Cranes Overview
Crane merupakan alat angkat yang memiliki kemampuannya untuk memindahkan
material/benda secara vertikal maupun horisontal. Crane menggunakan satu atau lebih mesin sederhana, seperti hoist untuk menciptakan keunggulan mekanis dan dengan demikian memindahkan beban diluar kemampuan normal manusia.
Ada beberapa macam industrial crane, diantaranya overhead suspension crane,
top running overhead crane, monorail crane, gantry crane dan jib crane.
Gambar 2.1 Electric single girder suspension overhead crane (Sumber: Operating and
Installation Instruction: Overhead Travelling Cranes and Suspension Cranes, STAHL
Gambar 2.2 Electric double girder top running overhead crane (Sumber: Operating and
Installation Instruction: Overhead Travelling Cranes and Suspension Cranes, STAHL
CraneSystems GmbH) Keterangan:
1. Crane bridge girder 2. End Carriage
3. Crane girder connection 4. Travel drive 5. Hoist 6. Power supply 7. Control pendant 8. Bridge panel 9. Buffer stop
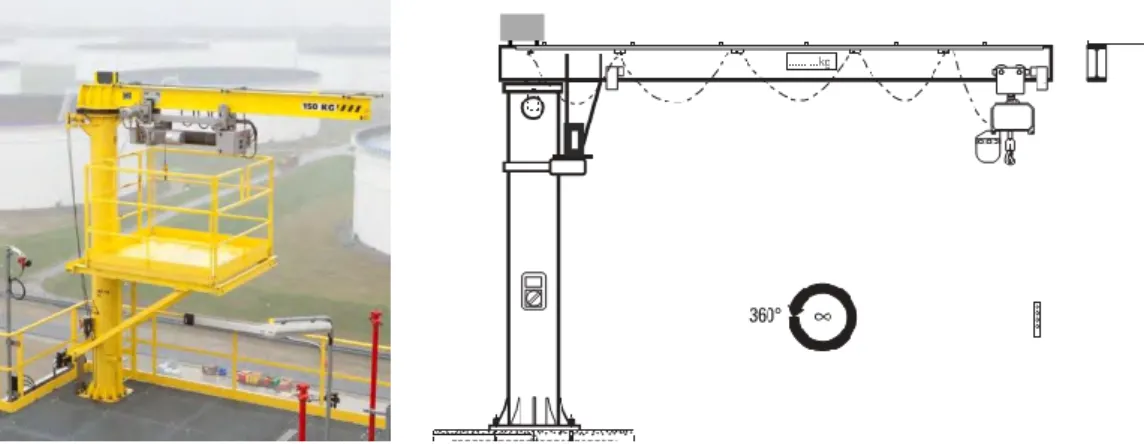
Gambar 2.3 Pillar jib crane (Sumber: Product Information: Slewing Cranes, STAHL CraneSystems GmbH)
Dari berbagai macam crane tersebut, salah satu komponen utamanya adalah hoist.
Hoist merupakan sebuah mesin, yang fungsi utamanya dalam sebuah crane adalah untuk
mengangkat dan menurunkan benda. Hoist berdasarkan media untuk pengangkatannya dibedakan menjadi dua macam, yaitu:
Wire rope hoist, media pengangkatannya menggunakan wire rope/seling. Chain hoist, media penggangkatannya menggunakan chain/rantai.
Gambar 2.4 Electric wire rope hoist dan electric chain hoist (Sumber: Product
Gambar 2.5 Electric wire rope hoist (Sumber: Cutaway view: AS Wire Rope
Hoist, STAHL CraneSystem GmbH)
Gambar 2.6 Electric chain hoist (Sumber: Cutaway view: ST Chain Hoist, STAHL CraneSystem GmbH) 3 4 5 6 7 1. Hoist control 2. Rope drum 3. Rope guide 4. Wire rope 5. Gear box 6. Hoist motor 7. Hoisting brake 1 2 3 4 5 6 7 1. Load chain 2. Hoist control 3. Hoisting brake 4. Hoisting motor 5. Slipping clutch 6. Gear box 7. Chain box 1 2
Sementara berdasarkan sumber penggerakknya secara umum ada dua macam, yaitu:
Electric hoist, sumber tenaganya dari listrik yang dikonversi menjadi
putaran oleh electric motor.
Pneumatic hoist, sumber tenaganya dari udara bertekanan yang dikonversi
menjadi putaran oleh pneumatic motor.
Gambar 2.7 Pneumatic chain hoist (Sumber: Product Information: Pneumatic Chain
Hoist, HADEF GmbH)
Semetara berdasarkan pergerakan horisontalnya, hoist dibedakan menjadi tiga, yaitu:
Stationary hoist, yaitu hoist yang tidak memiliki trolley, sehingga hanya
Gambar 2.8 Stationary hoist (Sumber: Product Brochure: SH Wire Rope Hoist, STAHL CraneSystems GmbH)
Monorail hoist, yaitu hoist yang memilki trolley untuk monorail runway
ataupun single girder overhead crane. Secara umum dibedakan menjadi dua, yaitu monorail lurus dan monorail bisa belok (articulated)
Gambar 2.9 Monorail trolley hoist (Sumber: Product Brochure: SH Wire Rope Hoist, STAHL CraneSystems GmbH)
Double rail crab hoist, yaitu hoist yang memilki trolley untuk aplikasi double girder overhead crane.
Gambar 2.10 Double rail crab hoist (Sumber: Product Brochure: AS Wire Rope Hoist, STAHL CraneSystems GmbH)
Pada sistem hoist, pada saat mengangkat atau menurunkan benda, beban ditanggung oleh motor (electric motor pada electric hoist dan pneumatic motor pada
pneumatic hoist), Pada saat proses pengangkatan atau penurunan beban, sementara beban
belum menyentuh tumpuannya, maka yang menahan beban tersebut adalah hoisting
brake. Jadi hoisting brake bekerja normally close, yang artinya pada saat motor tidak
bekerja, brake close / bekerja.
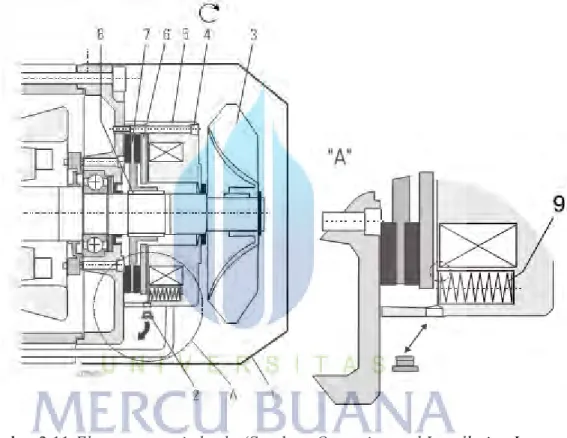
Gambar 2.11 Electromagnetic brake (Sumber: Operating and Installation Instruction:
SH Wire Rope Hoist, STAHL CraneSystems GmbH)
Keterangan: 1. Fan cover 2. Plug 3. Fan wheel 4. Fixing screw 5. Coil brake 6. Armature disk
7. Brake rotor/brake lining 8. Hub
Pada saat brake bekerja, yaitu posisi close, armature disk didorong oleh pressure
spring sehingga menekan brake rotor/lining, maka timbulah gaya pengereman. Friksi
yang terjadi pada brake rotor/lining akan membuatnya lama kelamaan aus. Ketika sudah sampai batas maksimum yang diijinkan, brake rotor/lining harus diganti. Keausan yang terjadi pada brake lining dipengaruhi dari kerja hoist tersebut.
Pada saat motor bekerja, arus masuk ke motor winding, arus dari simpul belitan diambil sebagai power supply brake coil. Arus masuk ke rectifier untuk disearahkan menjadi DC baru kemudian masuk ke coil brake sehingga menghasilkan gaya
electromagnetic yang menarik armature disk sehingga brake lining tidak lagi terkena
gaya dorong dari pressure spring, braking release dan motor berputar. Begitu seterusnya ketika motor start dan stop.
2.2 Crane control pada electric overhead crane
Pada electric crane, motor listrik merupakan sumber penggerak utamanya, yang mana merubah energi listrik menjadi energi mekanik berupa putaran.
Gambar 2.12 Fleming’s left-hand rule (Sumber: Inverter School Text: Inverter
Prinsip kerja motor induksi adalah jika magnet dipindahkan ke arah A ketika tidak disentuhkan ke piringan tembaga/copper disk, ternyata copper disk tersebut juga berputar dengan arah putaran yang sama. Pada saat yang sama, gaya gerak listrik diinduksikan ke
copper disk dan arus Eddy (arus induksi) terjadi. Hubungan antara arus Eddy
diinduksikan ke copper disk dan magnetic flux oleh magnet disebabkan oleh gaya
electromagnetic. Fenomena ini telah dibuktikan oleh orang Italy yang bernama Arago
dan dinamakan Arago’s disk. Gaya electromagnetic ditimbulkan dalam arah Fleming’s
right-hand rule dan menggerakkan disk/piringan.
Gambar 2.13 Arago’s disk (Sumber: Inverter School Text: Inverter Beginner Course, Mitsubishi Electric Corporation)
Pada motor induksi 3-phase (three-phase induction motor), terdiri dari inti stator (stator core), stator winding, gap dan inti rotor (rotor core), seperti pada gambar di bawah ini.
Gambar 2.14 Cutaway view 3-phase motor induksi (Sumber: Inverter School Text:
Inverter Beginner Course, Mitsubishi Electric Corporation)
Stator Rotor
Baik untuk gerakan hoisting (up-down), traversing (left-right) maupun travelling (forward-reverse) penggeraknya adalah motor. Jadi, pada prinsipnya crane control adalah motor control, mengontrol putaran motor penggerak sesuai dengan kebutuhan operasi.
Gambar 2.15 Overhead crane movement (Sumber: Product Information: Crane
Components, STAHL CraneSystems GmbH)
Ada dua macam kontrol pada overhead crane, yaitu direct-on-line (DOL) dan
variable speed drive (VSD).
Pada motor control menggunakan DOL komponen kontrol utamanya adalah
magnetic contactor. Penggunaan DOL control memiliki beberapa keterbatasan,
diantaranya: Travelling Tr a ve rsing Hoisting Reverse Forward Rig h t Left Down Up
Kecepatan dan torsi tidak bisa dikontrol, dalam artian kecepatan dan torsi yang dihasilkan adalah default dari design motor tersebut. Misalkan, sebuah motor memilki kecepatan 3000 rpm dan torsi 16 Nm, maka setelah start motor tersebut akan langsung menuju kecepatan dan torsi default nya.
Tidak dapat mengurangi inrush current, karena tidak dapat mengontrol akselerasinya motor.
Tidak bisa memproteksi terhadap overload yang terjadi, kecuali ditambahkan komponen berupa overload breaker, baik current maupun
thermal.
Tidak bisa memelihara efisiensi mechanical part, karena saat start cenderung ada hentakan yang diakibatkan karena starting inrush current untuk mendapatkan starting torque yang tinggi tanpa pengaturan akselerasi dan deakselerasinya.
DOL control memiliki kelebihan dari segi komersial jauh lebih murah dibandingkan dengan penggunaan VSD dan juga dari segi wiring lebih sederhana. DOL
control ini paling umum digunakan dalam sistem kontrol crane, baik yang double-speed
Gambar 2.16 Contoh circuit diagram dengan DOL control double speed (Sumber:
Project Document: Wiring Diagram Contactor Control, PT. WKP)
Pada sistem kontrol DOL, arus yang masuk ke rectifier brake berasal dari simpul belitan winding statornya.
Overload breaker
Contactor control
Gambar 2.17 Brake power input pada DOL control double speed (Sumber:
Maintenance Training, STAHL CraneSystems GmbH)
Sedangkan variable speed drive (VSD), merupakan motor control yang memungkinkan untuk mengatur kecepatan dan torsinya dengan mengatur frequency dan
voltage power supply yang masuk ke motor.
Pada prinsipnya, VSD terdiri dari 4 bagian utama, yaitu: rectifier/converter,
filter/smoothing, inverter dan control. Rectifier/converter berfungsi untuk merubah arus
AC (alternating current) menjadi DC (direct current), hal ini dilakukan karena arus DC lebih mudah untuk dimanipulasi dari pada arus AC. Bagian berikutnya adalah
filter/smoothing, fungsinya adalah untuk memperhalus arus DC hasil dari penyearahan.
Arus listrik yang sudah di filter kemudian masuk ke bagian inverter, yang fungsinya untuk merubah arus DC menjadi AC kembali dengan pengaturan dari control. Control akan mengatur besarnya frequency dan voltage yang keluar dari inverter sesuai dengan
preset yang dilakukan untuk mencapai fungsi operasi tertentu.
Brake power input
Gambar 2.18 Basic configuration of inverter atau VSD (Sumber: Inverter School Text:
Inverter Beginner Course, Mitsubishi Electric Corporation)
Dalam crane control system, ada dua macam kontrol yang digunakan dengan menggunakan VSD, yaitu model open-loop dan close-loop. Open-loop pada prinsipnya kontrol dengan menggunakan VSD, namun tidak ada input feedback kembali ke VSD dari motor yang di drive, biasanya dipakai untuk baik untuk hoisting, traversing maupun
travelling yang tidak membutuhkan positioning dengan akurasi tinggi. Keuntungan yang
didapat adalah secara wiring dan programming lebih simple dan secara cost lebih murah. Kekurangannya adalah dengan tidak adanya feedback dari motor yang di drive, VSD tidak mengetahui actual putaran motor yang di drive, karena adanya slip memungkinkan adanya selisih putaran motor yang di drive dengan perintah drive dari VSD ke motor.
Gambar 2.19 Contoh circuit diagram dengan VSD control model open-loop (Sumber:
Gambar 2.20 Contoh circuit diagram dengan VSD control model close-loop (Sumber:
Project Document: Wiring Diagram VSD Control Close-Loop, PT. WKP)
Dengan menggunakan VSD control, kecepatan motor bisa diatur sedimikian rupa sesuai dengan kebutuhan, termasuk lamanya akselerasi dan deakselerasi.
Penggunaan kontrol VSD model close-loop secara teknis lebih rumit dalam proses
wiring dan programming dibanding dengan open-loop, selain itu secara commercial lebih
tinggi, karena memerlukan device tambahan berupa rotary encoder, encoder card dan
connection cable. Disisi lain kekurangan tersebut, close-loop memiliki keunggulan
tersendiri yang tidak bisa dicapai oleh open-loop, yaitu bisa memberikan feedback ke
drive control, sehingga putaran dan torsi lebih terkontrol dengan baik untuk dynamic dan positioning control.