1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Jalan Layang Jombor terletak di Kabupaten Sleman, Yogyakarta, dibangun untuk mengurangi permasalahan lalu lintas pada simpang empat Jombor. Simpang empat Jombor merupakan simpang empat dengan kepadatan lalu lintas yang cukup tinggi, karena merupakan salah satu jalur aksesibilitas luar kota menuju Magelang, Ambarawa, Salatiga, dan Semarang. Jalan layang Jombor memiliki panjang total 1,125 m dengan lebar badan jalan 7 m. Rincian panjang jalan layang Jombor adalah sepanjang 675 m dari arah Jalan Solo (timur ke barat), kemudian di tengah dibuat jalan ke arah Magelang sepanjang 450 m.
Jalan Layang Jombor memiliki geometri tikungan untuk memfasilitasi arus lalulintas dari arah Solo menuju Magelang. Pada geometri tikungan jalan terdapat superelevasi jalan yang berperan untuk memberikan kenyamanan dan keamanan dalam berkendara, karena superelevasi mampu mengatasi gaya sentrifugal yang terjadi apabila kendaraaan melaju melalui lengkungan jalan. Keberadaan superelevasi sangat penting sehingga memerlukan perhatian khusus terhadap perencanaan dan pembangunannya. Superelevasi yang telah dibangun dapat diukur dan digambarkan kembali untuk menjadi bahan evaluasi kesesuaiannya terhadap rancangan awal. Evaluasi dapat dilakukan dengan cara pengukuran superelevasi jalan dan dibandingkan dengan superelevasi yang digambar pada as built drawing yang dibuat oleh pelaksana pekerjaan jalan.
As built drawing merupakan media yang menggambarkan kondisi pasca konstruksi jalan (Anonim, 2008). As built drawing digunakan sebagai acuan dalam kegiatan evaluasi geometri jalan karena dalam as built drawing tercantum nilai koordinat titik-titik stasiun jalan, koordinat titik ikat, serta ukuran-ukuran lain yang menunjukkan kondisi jalan yang telah dibangun. Dalam melakukan evaluasi geometri jalan, metode yang ideal untuk diterapkan adalah metode stake out yang
mengacu pada titik-titik yang telah diketahui koordinatnya pada as built drawing. Metode stake out dikatakan ideal karena titik-titik yang diukur dan diuji merupakan titik yang sama dengan titik yang digambar pada as built drawing.
Metode stake out dapat dilakukan apabila nilai koordinat titik-titik stasiun jalan yang mengacu pada sistem referensi horizontal tertentu dapat diperoleh dari as bult drawing. Pada kenyataannya, as built drawing yang telah dibuat pelaksana pekerjaan sering kali tidak mencantumkan nilai koordinat titik-titik stasiun beserta referensinya yang berperan penting dalam pemantauan dan evaluasi dari superelevasi jalan yang dibangun. Keterbatasan informasi koordinat dan sistem referensi pada as built drawing tersebut mengakibatkan metode stake out terhadap superelevasi jalan tidak dapat dilakukan.
Kegiatan stake out yang tidak dapat dilaksanakan mengakibatkan evaluasi jalan dilakukan dengan melakukan pengukuran geometri jalan yang direpresentasikan dengan bagian tepi dan sumbu jalan. Pengukuran geometri jalan dilakukan dengan merekam nilai-nilai koordinat pada tepi dan sumbu jalan dengan menerapkan teknologi ekstra terestris. Hasil pengukuran ini selanjutnya diolah menggunakan pendekatan numeris dan grafis untuk memperoleh hasil evaluasi yang diinginkan. Pendekatan numeris digunakan dalam perancangan kembali geometri horizontal alignment menggunakan nilai parameter utama yang diperoleh dari as built drawing. Produk dari pendekatan numeris seringkali tidak sesuai dengan hasil pengukuran di lapangan. Ketidaksesuaian antara hasil pengolahan data ukuran dengan informasi pada as built drawing diatasi dengan pendekatan grafis yang melibatkan proses penggeseran dan pemutaran, sehingga horizontal alignment hasil pendekatan numeris mendekati bentuk dan orientasi horizontal alignment hasil pengukuran.
Kegiatan evaluasi superelevasi jalan dalam penelitian ini menggunakan metode pengukuran ekstra terestris. Pengukuran ekstra terestris dipilih karena memiliki kemampuan untuk melakukan pengukuran secara handal, cepat, dan presisi. Salah satu metode pengukuran ekstra terestris adalah pengukuran berbasis Network Transport RCTM via Internet Protocol (NTRIP). Teknologi GNSS RTK NTRIP diharapkan dapat memberikan hasil pengukuran yang mampu membantu kegiatan evaluasi dan analisis terhadap superelevasi jalan layang Jombor.
I.2. Identifikasi Masalah
Superelevasi Jalan Layang Jombor memiliki peran penting dalam memberikan kenyamanan dan keamanan dalam berkendara. Superelevasi yang kurang baik mengakibatkan ketidaknyamanan pengguna jalan dan dapat berujung pada kecelakaan lalu lintas. Peran penting dari keberadaan superelevasi mengakibatkan perlunya evaluasi terhadap nilai-nilai superelevasi yang telah dibangun yang dilaporkan dalam bentuk as built drawing. As built drawing Jalan Layang Jombor yang dibuat pada tahun 2014 oleh PT. Adhi Karya tidak memberikan informasi koordinat titik-titik tikungan, sehingga metode stake out tidak dapat dilakukan. Tidak dapat dilakukannya metode stake out mengakibatkan kegiatan evaluasi dilaksanakan melalui pendekatan numeris dan grafis untuk dapat memperoleh nilai superelevasi eksisting. Evaluasi dilakukan dengan menguji nilai superelevasi yang terlapor pada as built drawing dengan nilai superelevasi hasil pengolahan data ukuran yang diperoleh dengan metode GNSS RTK-NTRIP.
I.3. Pertanyaan Penelitian
Berdasarkan permasalahan yang telah dijabarkan, pertanyaan penelitian yang dijawab pada kegiatan penelitian ini adalah:
1. Bagaimana penerapan teknologi RTK-NTRIP dalam survei as built terhadap jalan dan superelevasinya?
2. Berapa perbedaan antara nilai superelevasi as built drawing dan nilai superelevasi jalan hasil pengukuran?
3. Apakah nilai superelevasi jalan menurut as built drawing berbeda secara signifikan terhadap hasil pengukuran dengan survei GNSS RTK-NTRIP dengan tingkat kepercayaan 95%?
I.4. Tujuan Penelitian
Tujuan dari kegiatan pengukuran superelevasi jalan yaitu:
1. Diperolehnya nilai perbedaan superelevasi antara as built drawing dan nilai superelevasi jalan hasil pengukuran.
2. Diketahuinya kesesuaian antara nilai superelevasi as built drawing dan nilai superelevasi jalan hasil pengukuran, mengacu pada standar yang berlaku (Tata Cara Perencanaan Geometri Jalan, Direktorat Jendral Bina Marga Tahun 1997).
I.5. Manfaat
Hasil penelitian ini diharapkan dapat menjadi pertimbangan bagi pelaksana survei as built, untuk melaporkan hasil kegiatannya secara lengkap, terkait hal-hal yang berhubungan dengan aspek geodesi. Manfaat untuk pemilik pekerjaan jalan adalah sebagai bahan pertimbangan untuk melihat kesesuaian laporan pasca konstruksi dengan kondisi sebenarnya di lapangan.
I.6. Pembatasan Masalah
Dengan tujuan agar permasalahan dapat terjawab dan penelitian yang terfokus dan tidak keluar dari konteks maka diperlukan pembatasan masalah. Adapun pembatasan masalah pada penelitian ini sebagai berikut :
1. Kegiatan evaluasi jalan dilakukan dengan perekaman nilai koordinat bagian-bagian di sepanjang tepi kiri, sumbu, dan tepi kanan jalan.
2. Perekaman koordinat bagian jalan menggunakan metode RTK NTRIP dengan satu buah stasiun CORS.
3. Data yang telah diakuisisi digambarkan menggunakan perangkat lunak CAD (Computer Aided Design).
4. As built drawing sebagai bahan penelitian diperoleh setelah kegiatan akuisisi data, sehingga tidak dapat dilakukan kegiatan stake out untuk menguji titik yang sama antara as built drawing dan titik eksisting.
5. Penggambaran geometri lengkungan dilakukan dengan pendekatan numeris dan grafis, dengan mengubah nilai jari-jari as built drawing. Pendekatan numeris dilakukan dengan perhitungan nilai parameter dan penggambaran lengkungan berdasarkan informasi yang diperoleh dari as built drawing. Pendekatan grafis dilakukan dengan melakukan translasi dan rotasi terhadap lengkungan hasil perhitungan hingga orientasi dan bentuk lengkungan sesuai dengan sumbu jalan hasil pengukuran.
6. Keterangan mengenai sistem tinggi yang digunakan dalam as built drawing tidak tersedia, sehingga sistem tinggi yang digunakan dalam proses penggambaran dan perhitungan adalah sistem tinggi hasil ukuran dengan GNSS RTK NTRIP yaitu sistem tinggi geometris.
7. Evaluasi terhadap superelevasi dilakukan dengan membandingkan nilai superelevasi hasil ukuran dengan nilai superelevasi as built drawing. Evaluasi terhadap superelevasi mengacu pada Standar Nasional Indonesia untuk Geometri Jalan Perkotaan tahun 2004.
8. Evaluasi dilakukan dengan uji student pada tingkat kepercayaan 95%. Evaluasi dilakukan secara tersendiri berdasarkan selisih nilai superelevasi bagian kiri dan kanan jalan.
I.7. Tinjauan Pustaka
Pribadi (2013) melakukan tracking menggunakan Garmin GPSmap 60CSx di sepanjang ruas jalan Airmadidi-Tondano untuk mendapatkan data koordinat dan elevasi ruas jalan. Penggunaan GPS dalam penelitian ini untuk mendeteksi dengan cepat lokasi-lokasi pada ruas jalan yang tidak memenuhi persyaratan sehubungan dengan kecepatan rencana yang ditetapkan khususnya pada jalan antar kota yang nantinya dapat dijadikan sebagai proyek peningkatan jalan. Lokasi penelitian dipilih pada sta 28+759.822 meter sampai dengan sta 31+523.600 meter (dari kota Manado) yang terdiri dari 46 lengkung, 38 lengkung diantaranya tidak memenuhi standar kecepatan rencana Vr = 40 km/jam dengan besar radius lengkung (Rc) minimum sebesar 50 meter. Untuk menetapkan besaran dari radius lengkung tersebut dibutuhkan waktu selama 1 jam dengan menggunakan bantuan program Autocad Land Desktop 2007, sehingga dengan cepat bisa mengetahui bahwa lokasi penelitian ini perlu untuk diupayakan perubahan alinyemen jalan sesuai standar kriteria perencanaan. Evaluasi geometrik horizontal alignment dilakukan dengan membandingkan kondisi alignment horizontal eksisting dengan standar yang dikeluarkan oleh Dirjen Bina Marga, yaitu Standard Perencanaan Geometrik untuk Jalan Kota tahun 1992.
Fambela (2014) melakukan evaluasi terhadap perencanaan geometrik jaringan jalan di dalam Universitas Brawijaya Malang. Penelitian dilakukan dengan
menggunakan metode pemetaan terestris dengan alat Total Station tipe Topcon GTS 229 serta pengolahan data menggunakan perangkat lunak AutoCAD Land Desktop 2009. Trase- trase yang menjadi obyek penelitian adalah trase pada jaringan jalan di dalam kampus Universitas Brawijaya. Hasil dari penelitian yang dilakukan adalah terdapatnya dua lengkung horizontal pada gerbang KPRI hingga persimpangan tiga Kafetaria Teknik yang tidak memenuhi standar. Evaluasi geometrik perpersimpanganan dilakukan dengan mengacu pada peraturan resmi yang dikeluarkan oleh Dirjen Bina Marga, yaitu Standard Perencanaan Geometrik untuk Jalan Kota tahun 1992 dan Pt T-02-2002-B Tata Cara Perencanaan Geometrik Perpersimpanganan Sebidang. Sesuai dengan Pt T-02-2002-B semua perpersimpanganan sebidang dimana pertemuan lengan dengan lengan harus saling tegak lurus (⊥), toleransi sudut/∝ bisa sampai ± 20º. Untuk hal-hal dimana kondisi medan sangat sulit (karena faktor topografi atau lahan terbatas) dan bentuk perpersimpanganan saling tegak lurus sulit diperoleh, maka bentuk perpersimpanganan bisa tidak saling tegak lurus dengan sudut perpersimpanganan terkecil harus lebih besar dari 65º. Dari hasil analisis didapatkan bahwa semua persimpangan memenuhu syarat pertemuan lengan dan syarat manuver.
Hidayah (2013) melakukan evaluasi geometrik jalan pada jenis tikungan Spiral-Circle-Spiral dan tikungan Spiral-Spiral. Evaluasi dilakukan terhadap ruas jalan tembus Tawangmangu pada STA 2+223,92 hingga STA 3+391,88. Penelitian dilakukan untuk mengetahui jari-jari kelengkungan, panjang lengkung peralihan, dan landai relatif. Dalam melakukan evaluasi pada tikungan (studi kasus jalan tembus Tawangmangu STA 2+223,92 – STA 3+391,88) digunakan data dari Kementrian Pekerjaan Umum Direktorat Jenderal Bina Marga Balai Besar Pelaksanaan Jalan Nasional V Satuan Kerja Perencanaan dan Pengawasan Jalan Nasional Provinsi Jawa Tengah. Perhitungan geometrik jalan menggunakan metode dari Bina Marga. Hitungan kemudian dibandingkan dengan standar perhitungan dari Bina Marga. Hasil evaluasi pada tikungan (studi kasus jalan tembus Tawangmangu Sta 2+223,92 – Sta 3+391,88) meliputi: (1) jari-jari tikungan memenuhi syarat dengan R > Rmin, panjang lengkung peralihan pada tikungan memenuhi syarat dengan LS > LSmin, dan
Arbaiyah (2013) menemukan beberapa kondisi geometrik pada tikungan Padangluhong yang tidak memenuhi SNI atau standar yang berlaku. Nilai kemiringan yang tidak memenuhi standar memiliki nilai yang terlalu besar yaitu sekitar 14,7%. Kemiringan yang terjadi melebihi batas maksimum yang dianjurkan oleh Bina Marga, tidak adanya pelebaran perkerasan pada tikungan, jari-jari tikungan yang terlalu kecil serta kurangnya bagian lurus sisipan antara kedua tikungan. Upaya dalam pemecahan masalah yang terdapat pada tikungan, dibutuhkan data tikungan yang didapatkan melalui pengukuran parameter-parameter pada tikungan. Pengukuran yang dilakukan yaitu dengan cara pengambilan titik-titik hitungan dengan menggunakan alat theodolit. Dalam perhitungan yang memakai trase jalan eksisting, didapatkan perhitungan perencanaan tikungan melebihi jalan yang ada. yang berada disamping Hotel Sapadia tersebut belum memenuhi kriteria perencanaan karena banyak parameter-parameter perencanaan jalan yang tidak sesuai dengan standar yang telah ditetapkan oleh Bina Marga seperti superelevasi yang melebihi standar, tidak adanya pelebaran perkerasan pada tikungannya, serta daerah sisipan garis lurus antara tikungan tersebut tidak mencapai panjang 20 m. Untuk meminimalisir angka kecelakaan pada kendaraan, perlu dilakukan perubahan trase jalan dalam mendesain jalan Padangluhong untuk mendapatkan perhitungan tikungan yang memenuhi standar yang telah ditetapkan.
Fahlifie (2007) melakukan penelitian terhadap perencanaan geometrik pada jalan alternatif Waduk Darma, Kabupaten Kuningan, Jawa Barat. Penelitian dilakukan pada STA. 0+000 hingga STA. 0+640,026. Evaluasi dilakukan berdasarkan data sekunder yang diperoleh dari PT. INDEC & Associates Limited, selaku konsultan Perencana Proyek Pembangunan Jalan Alternatif Waduk Darma. Hasil penelitian diperoleh bahwa dengan superelevasi lebih dari 4%, dengan nilai Δ yang besar, jari-jari lingkaran yang direncanakan lebih kecil, sedangkan lengkung Full Circle memerlukan jari-jari yang besar. Berdasarkan hasil evaluasi, bentuk lengkungan diubah menjadi tipe Spiral-Circle-Spiral. bentuk lengkung PI1, PI2, dan PI3 diubah menjadi lengkung SCS dengan menggunakan jari-jari yang ada yaitu 100 m dan 55 m, dengan kecepatan rencana tetap yaitu 30 km/jam dan 40 km/jam.
Mahardani (2015) melakukan kajian terhadap penggunaan metode GNSS/GPS-RTK berbasis NTRIP untuk menentukan tinggi detil pada gambar situasi skala 1:500.
Hasil pengukuran dengan metode ini dibandingkan dengan ukuran metode terestris, yaitu dengan menggunakan alat Total Station dan sipat datar. Perbedaan nilai tinggi yang diperoleh dari kedua metode dianalisis melalui uji statistik. Hasil pengolahan tinggi kedua metode yang telah dilakukan menunjukkan adanya perbedaan rata-rata sebesar -0,041 m. Hal ini berarti bahwa tinggi permukaan lokasi penelitian hasil pengamatan GNSS/GPS lebih rendah sebesar 0,041 m terhadap hasil pengukuran terestris. Secara visual pola kontur gambar situasi hasil pengukuran dengan kedua metode hampir mendekati kesamaan. Hasil analisis dengan uji statistik menunjukkan nilai tinggi perbedaannya signifikan. Namun besarnya perbedaan yang dihasilkan tidak berarti terhadap pola kontur pada gambar situasi skala 1 : 500.
Bagus (2015) melakukan penelitian tentang pengukuran penampang memanjang dan penampang melintang dalam pekerjaan survei rekayasa. Pengukuran penampang memanjang dan melintang dapat dilaksanakan dengan berbagai macam alat ukur seperti Waterpass dan Total Station. Dalam penelitian ini dilakukan pengukuran dengan menggunakan sistem GNSS, dengan menganalisis pengukuran penampang memanjang dan melintang menggunakan metode RTK-NTRIP. Pengukuran ini kemudian dibandingkan dengan total station dan waterpass yang dianggap benar. Dari hasil analisis didapatkan bahwa rata rata selisih tinggi semua data RTK-NTRIP dengan tinggi waterpass dimana nilai undulasi (N) dianggap sama diwilayah tersebut adalah 1,882 m dengan standar deviasi 7,993. Rata rata selisih tinggi data fixed RTKNTRIP dengan tinggi waterpass adalah 0,453 m dengan standar deviasi 0,645. Rata rata selisih tinggi antara tinggi waterpass dan tinggi RTK-NTRIP dan telah di lakukan perubahan dengan model geoid egm2008 adalah 21.572 m dengan standar deviasi 2.008.
I.8. Landasan Teori 1.5.1 Geometri Jalan
Geometri jalan merupakan bentuk fisik dari jalan yang dibuat untuk memenuhi fungsi dasar dari jalan, yaitu memberikan pelayanan yang optimum pada arus lalu lintas. Elemen dari geometri jalan yang utama antara lain horizontal alignment, alinyemen vertikal, serta penampang melintang jalan (Sukirman, 1999). Perencanaan geometrik jalan mengacu pada Tata Cara Perencanaan Geometrik Jalan Antar Kota
(TCPGJAK) Tahun 1997 yang dikeluarkan oleh Departemen Pekerjaan Umum, Direktorat Jenderal Bina Marga.
I.5.1.1. Horizontal alignment. Horizontal alignment merupakan proyeksi sumbu jalan pada bidang horizontal yang terdiri atas bagian lurus atau tangent, dan bagian lengkung (disebut juga tikungan). Geometri pada bagian lengkung dirancang untuk mengimbangi gaya sentrifugal yang diterima oleh kendaraan yang berjalan pada kecepatan rencana (VR) agar jalan dapat dilalui dengan aman dan nyaman oleh pengguna jalan. Menurut TCPGJAK, pada bagian lengkung atau tikungan, geometri yang terbentuk dapat berupa Spiral-Circle-Spiral (SCS), Full Circle (FC), dan Spiral-Spiral (SS). Selain itu, pada tikungan juga terdapat geometri superelevasi yang bertujuan untuk mengimbangi gaya sentrifugal yang diterima kendaraan pada saat berjalan melalui tikungan pada kecepatan VR.
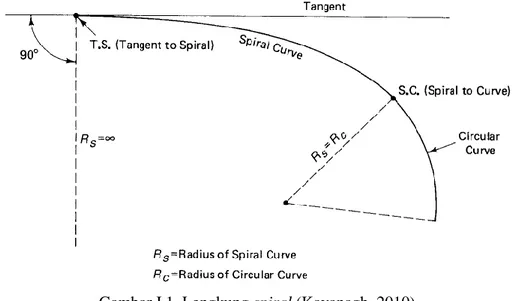
I.5.1.2. Lengkung Spiral-Circle-Spiral (SCS). Spiral adalah lingkaran yang radius atau jari-jarinya berubah secara seragam. Spiral diterapkan pada konstruksi jalan raya untuk mengatasi perubahan arah, dari bagian tangent menuju bagian lengkung lingkaran (lengkung peralihan). Panjang dari spiral digunakan sebagai bagian transisi dari perkerasan normal menuju superelevasi penuh (Sukirman, 1999).
Gambar I.1. Lengkung spiral (Kavanagh, 2010)
Gambar I.1 menunjukkan bahwa lengkung spiral disisipkan di antara bagian tangen, menuju bagian lingkaran. Hal ini dapat dilihat dari besarnya radius pada bagian lurus Tangent to Spiral (T.S) yang tak terhingga, berubah secara seragam
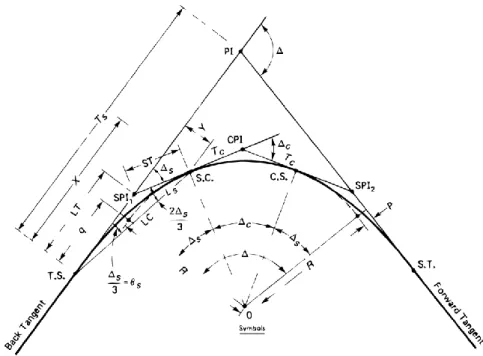
hingga pada suatu titik, nilai radius menjadi sebesar radius lingkaran (RS=RC). Lengkung spiral digunakan pada horizontal alignment untuk mengakomodasi pengguna jalan untuk berpindah dari bagian tangent ke bagian lingkaran dengan aman dan nyaman pada kecepatan yang cukup tinggi. Parameter dari lengkung Spiral-Circle-Spiral dapat diamati pada Gambar I.2.
Gambar I.2. Parameter lengkung Spiral-Circle-Spiral (Kavanagh, 2010)
Keterangan Gambar I.2: T.S. : Tangent to Spiral S.C. : Spiral to Curve C.S. : Curve to Spiral S.T. : Spiral to Tangent
Ts : Spiral Tangent
X : Jarak sepanjang tangen dari T.S. ke titik pada Right Angle ke S.C (m)
Y : Jarak Right Angle dari tangen ke S.C (m) LT : tangen panjang (spiral)
ST : tangen pendek (spiral)
LS : panjang lengkung spiral (m) LC : Long Chord
q : jarak sepanjang tangen ke titik pada Right Angle menuju BC (Beginning of Curve) (m)
p : jarak dari offset yang dibentuk BC (m)
TC : tangen pada lengkung lingkaran (m)
CPI : titik perpotongan pada tangen yang membentuk lengkung lingkaran SPI : titik perpotongan pada tangen yang lengkung spiral
PI : Point of Intersection dari tangent lengkung horizontal alignment
LC : panjang lengkung lingkaran (m)
L : panjang keseluruhan lengkungan, dari T.S. menuju S.T (m) Δ : sudut di PI yang dibentuk dari tangen menuju S.T (derajat) ΔC : sudut pusat busur lingkaran (derajat)
ΔS : sudut spiral (derajat)
R : radius atau jari-jari busur lingkaran (m)
Formula yang digunakan dalam perhitungan parameter lengkungan pada Gambar I.2 adalah persamaan I.1 sampai dengan I.8.
Δ
S=
𝐿𝑆 .90 π . R ... (I.1) ΔC = Δ− 2ΔS ... (I.2) 𝐿𝐶 = ΔC 360 x 2π. R ... (I.3) 𝐿 = 𝐿𝐶− 2𝐿𝑆 ... (I.4) 𝑝 = 𝐿𝑆2 6.R− R(1 − cosΔS) ... (I.5) 𝑞 = 𝐿𝑆− 𝐿𝑆3 40.R2− R sinΔS ... (I.6)𝐸
𝑆= (R + 𝑝) sec
1 2Δ − R ... (I.7)
𝑇𝑆 = (R + 𝑝) tg 1 2Δ + 𝑞 ... (I.8)ΔS : sudut spiral (derajat)
ΔC : sudut pusat busur lingkaran (derajat)
Δ : sudut di PI yang dibentuk dari tangen menuju S.T (derajat)
LC : panjang lengkung lingkaran (m)
L : panjang keseluruhan lengkungan, dari T.S. menuju S.T (m)
LS : panjang lengkung spiral (m)
q : jarak sepanjang tangen ke titik pada Right Angle menuju BC
p : jarak dari offset yang dibentuk BC (m)
R : radius atau jari-jari busur lingkaran (m)
Ts : Spiral Tangent 1.5.2 Superelevasi
Menurut TCPGJAK (1997), superelevasi adalah suatu kemiringan melintang di tikungan yang berfungsi untuk mengimbangi gaya sentrifugal yang diterima kendaraan pada saat berjalan melalui tikungan dengan kecepatan tertentu. Superelevasi dicapai secara bertahap dari kemiringan melintang normal pada bagian jalan yang lurus, sampai ke kemiringan maksimum pada bagian lengkung jalan.
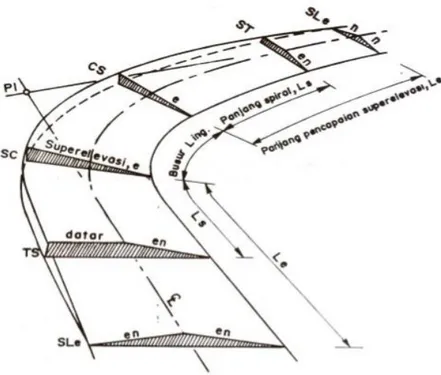
Pada Gambar I.3 terlihat tampilan tiga dimensi dari geometri superelevasi. Pada lengkung peralihan (LS) terjadi perubahan superelevasi badan jalan bagian kiri
dan kanan. Peubahan yang terjadi pada lengkung peralihan adalah nilai superelevasi normal (en), mengalami kenaikan menjadi datar (e0), hingga akhirnya mencapai superelevasi penuh pada titik S.C (awal busur lingkaran) hingga C.S (akhir busur lingkaran).
Apabila suatu kendaraan bergerak dengan kecepatan tetap V pada bidang datar atau miring dengan lintasan yang berbentuk suatu lengkung seperti lingkaran, maka pada kendaraan yang melintas bekerja gaya kecepatan V dan gaya sentrifugal F (Sukirman, 1999). Gaya sentrifugal inilah yang mendorong kendaraan secara radial ke arah luar lajur jalan yang dilalui. Arah gaya ini tegak lurus terhadap arah kecepatan V.
Gaya sentrifugal yang dialami oleh kendaraan dijelaskan pada persamaan I.9. F = ma ... (I.9) Dalam hal ini:
F : gaya sentrifugal (N) m : massa : G/g
a : percepatan sentrifugal : V2/R (m/det2)
Dengan demikian, besarnya gaya sentrifugal dapat ditulis pada persamaan I.10.
F =
G V2g R ... (I.10)
Gaya sentrifugal yang dialami oleh kendaraan harus diimbangi agar kendaraan tetap berada pada lajur jalannya. Untuk mengimbangi gaya sentrifugal, terdapat gaya-gaya lain diantaranya :
1. gaya gesekan melintang antara ban dan kendaraan dengan permukaan jalan, 2. komponen berat kendaraan akibat kemiringan melintang permukaan jalan
(superelevasi).
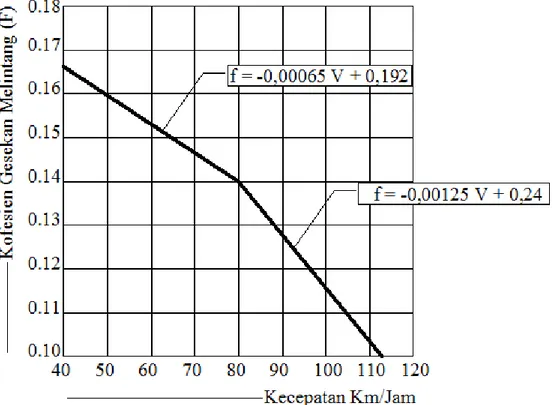
Besar koefisien gesekan melintang untuk perencanaan geometri tikungan dapat dilihat dalam diagram berikut :
Gambar I.4. Koefisien gesekan melintang maksimum untuk desain geometri tikungan (Sukirman, 1999)
Berdasarkan grafik yang terlihat pada Gambar I.4, nilai kecepatan rencana yang kurang dari 80 km/jam berlaku koefisien gesekan melintang (f) sebesar -0,00065 V + 0,192. Sedangkan untuk kecepatan rencana dengan rentang 80 - 112 km/jam berlaku f = -0,00125 V + 0,24.
Untuk mengimbangi gaya sentrifugal, koefisien gesekan melintang bekerja bersama-sama komponen berat kendaraan ketika kendaraan melalui tikungan jalan. Komponen-komponen gaya yang berpengaruh digambarkan dalam Gambar I.5.
Keterangan Gambar I.5 (Keterangan ini berlaku juga untuk notasi pada persamaan I.11 sampai dengan I.18):
G : massa kendaraan yang melintas (kg)
α : sudut kemiringan lengkung jalan
Fs : gaya gesekan antara ban dan permukaan jalan
g : gaya gravitasi (9,81 m/det2)
V : kecepatan kendaraan (km/h)
R : jari–jari lengkung jalan (m)
f : koefisian gesek perkerasan aspal (0,012 sampai 0,017)
e : superelevasi (%)
Gambar I.5 menjelaskan berbagai komponen gaya yang berpengaruh pada kendaraan, ketika melalui geometri tikungan jalan. Pada geometri superelevasi yang dibentuk oleh sudut α, kendaraan mengalami gaya gesekan menuju ke bagian dalam jalan sebesar Fs. Gaya gesekan saling berlawanan dengan gaya sentrifugal F.
Pada Gambar I.5 dijelaskan pada persamaan I.11 sampai dengan I.17.
G sin α + Fs = G g V2 R cos α ... (I.11) G sin α + f (G cos α + G g V2 R sin α ) = G g V2 R cos α ... (I.12) G sin α + f G cos α =G g V2
R (cos α − f sin α) ... (I.13) Gsin α cos α+f G = G g V2 R (1 −f tg α) ... (I.14) e= tg α ... (I.15) G (e + f) = G g V2 R (1 − ef) ... (I.16) e+f 1 − ef = V2 g R ... (I.17)
Karena nilai ef kecil, maka nilainya diabaikan sehingga diperoleh rumus umum untuk lengkung horizontal seperti pada persamaan I.18 (Sukirman, 1999):
e + f = V2
g R ... (I.18)
Selanjutnya ketajaman lengkung horizontal dapat dinyatakan dengan besarnya radius dari lengkung horizontal atau dengan besarnya derajat lengkung (D), yaitu besarnya sudut lengkung yang menghasilkan panjang busur 25 m. Jika nilai R semakin besar, maka nilai D semakin kecil dan berlaku sebaliknya.
Nilai D diperoleh dengan persamaan I.19 sampai dengan I.20.
D = 25
2 π R x 360
o... (I.19) D = 1432,39
2 π R ... (I.20)
Berdasarkan rumus I.18, dapat dilihat bahwa besarnya radius lengkung horizontal dipengaruhi oleh nilai e dan f serta besar kecepatan rencana (Vr). Hal ini menunjukkan terdapat nilai radius minimum (Rmin) untuk nilai superelevasi maksimum yang ditentukan (emaks) dan nilai koefisien gesekan melintang maksimum (f maks). Menurut TCPGJAK, nilai radius minimum ditentukan dengan persamaan I.21.
Rmin = VR2
127 (emaks+ f) ... (I.21)
Dalam hal ini:
Rmin : radius minimum (m)
VR : kecepatan rencana (km/jam) emaks : superelevasi maksimum (%)
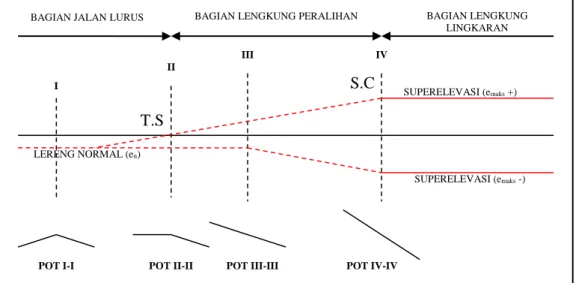
I.5.2.1. Diagram superelevasi. Diagram superelevasi menggambarkan pencapaian superelevasi dari superelevasi normal ke superelevasi penuh, sehingga dapat ditentukan bentuk penampang melintang pada setiap titik lengkung yang direncanakan. Diagram superelevasi digambar berdasarkan elevasi sumbu jalan sebagai garis nol. Nilai superelevasi diberi tanda positif (+) jika elevasi sumbu jalan lebih rendah daripada elevasi tepi perkerasan. Sebaliknya nilai superelevasi diberi tanda negatif (-) jika elevasi sumbu jalan lebih tinggi daripada elevasi tepi perkerasan
(Sukirman, 1999). Diagram superelevasi ini mewakilkan nilai-nilai yang terdapat pada gambar tikungan sesungguhnya. Seperti awal dan akhir lengkung, panjang lengkung (LS dan LC), superelevasi sisi jalan (e), dan sumbu utama jalan.
Nilai superelevasi dapat dicari dengan data elevasi tepi perkerasan dan elevasi sumbu jalan. Arbaiyah (2013) menuliskan rumus perhitungan nilai superelevasi seperti pada persamaan I.22:
e =
(elevasi bahu luar − elevasi bahu dalam)lebar jalan
x 100 % ... (I.22)
Lebar jalan dapat dihitung menggunakan koordinat dengan persamaan I.23:
D = √(X2 − X1)2+ (Y
2− Y1)2+ (Z2 − Z1)2 ... (I.23)
Dalam hal ini:
e : nilai superelevasi D : jarak X1 : posisi X titik 1 X2 : posisi X titik 2 Y1 : posisi Y titik 1 Y2 : posisi Y titik 2 Z1 : posisi Z titik 1 Z2 : posisi Z titik 2
Penggambaran diagram superelevasi dengan sumbu jalan sebagai sumbu putar (Sukirman, 2009) dapat dilihat pada Gambar I.6.
Gambar I.6. Diagram superelevasi dengan sumbu jalan sebagai sumbu putar (Sukirman, 1999)
Keterangan Gambar I.6:
T.S. : titik stasiun Tangent to Spiral S.C. : titik stasiun Spiral to Curve
POT I-I : bentuk penampang tipe pertama POT II-II : bentuk penampang tipe ke-2 POT III-III : bentuk penampang tipe ke-3 POT IV-IV : bentuk penampang tipe ke-4
Bentuk diagram pada Gambar I.6 digunakan pada jalan tanpa median (pemisah jalur pada jalan). Metode ini tidak mengganggu perencanaan penampang memanjang jalan yang bersangkutan. Ada empat tipe penampang melintang dalam diagram superelevasi yang terdapat pada gambar. Tipe pertama (POT I-I) adalah penampang pada bagian jalan yang lurus. Superelevasi yang terbentuk pada tipe ini adalah superelevasi normal (en) sebesar -2%. Pada tipe ke-2 (POT II-II) menunjukkan penampang melintang yang mengalami perubahan dari en menuju superelevasi nol pada lajur jalan bagian luar. Posisi ini merupakan posisi transisi dari jalan lurus menuju tikungan. Tipe ke-3 (POT III-III) merupakan tipe penampang pada posisi transisi (lengkung spiral) yang memiliki bentuk superelevasi normal dengan nilai en
BAGIAN JALAN LURUS BAGIAN LENGKUNG PERALIHAN BAGIAN LENGKUNG
LINGKARAN I II III IV LERENG NORMAL (en) SUPERELEVASI (emaks +) SUPERELEVASI (emaks -) T.S S.C
positif pada bahu luar, serta negatif pada bahu dalam. Tipe ke-4 (POT IV-IV) adalah tipe penampang dengan nilai superelevasi maksimum pada kedua bahu jalan, en positif pada bahu luar dan negatif pada bahu dalam.
1.5.3 Root Mean Square Error (RMSE)
Menurut Peraturan Kepala Badan Informasi Geospasial Nomor 15 Tahun 2014 tentang Pedoman Teknis Ketelitian Peta Dasar, RMSE adalah nilai perbedaan antara nilai sesungguhnya dengan nilai hasil ukuran. Pengujian ketelitian posisi mengacu pada perbedaan koordinat (X,Y,Z) antara titik uji pada gambar atau peta dengan lokasi sesungguhnya. Pada pemetaan dua dimensi yang perlu diperhitungkan adalah koordinat (X dan Y) titik uji dan posisi sebenarnya di lapangan. Menurut Chai (2014) RMSE dapat dicari dengan persamaan I.24.
RMSE = √1
n∑ ei 2 n
i=1 ... (I.24)
Dalam hal ini:
ei2 : kuadrat selisih antara hasil ukuran dengan nilai sebenarnya n : banyaknya ukuran yang digunakan
1.5.4 Survei As Built
Survei as built atau survei purna rancang bangun pada dasarnya merupakan survei yang dilakukan pasca konstruksi. Tujuan survei ini adalah untuk memperoleh satu bentuk standar gambaran otentik terhadap proyek dikerjakan oleh pihak tekait (Anonim, 2008). Hasil gambaran ini nantinya digunakan sebagai bahan pemeliharaan, evaluasi dan penanganan masalah yang terjadi jika hasil yang telah dikerjakan tidak sesuai dengan yang direncanakan.
Pada pelaksanaan pekerjaan rekayasa, sangat memungkinkan terjadinya perubahan cakupan pekerjaan. Faktor-faktor yang dapat mengubah cakupan pekerjaan diantaranya adalah adanya modifikasi rancangan, ketersedian material, kondisi tempat yg berbeda, permintaan perubahan dari pemilik pekerjaan, dan sebagainya. Perubahan-perubahan ini biasanya tercantum dalam kontrak dokumen
tidak terkecuali perubahan desain dari desain awal yang sudah dibuat. Dokumen hasil perubahan desain ini dinamakan gambar as built atau as built drawing.
As built penting dalam bidang pekerjaan kontraktor dan sangat dibutuhkan apabila ada pekerjaan lain di tempat yang sama setelah proyek selesai. Perubahan dari desain sering diabaikan oleh manager kontraktor, mereka lebih fokus dalam mencapai target yang telah dijadwalkan (Pettee, 2005).
As built digunakan untuk menunjukkan kondisi setelah pekerjaan selesai. Pekerjaan as built ini bertujuan untuk mendokumentasi setiap perubahan dari desain asli/awal. Menurut Pettee (2005) as built memiliki empat peran penting yaitu:
1. Sebagai sumber informasi yang menggambarkan keadaan terkini dan perubahan yang terjadi selama pekerjaan berlangsung. Dalam hal ini, as built tidak hanya catatan tentang pekerjaan yang telah dilakukan, tetapi juga rencana dari kontraktor untuk tahap pekerjaan selanjutnya.
2. Sebagai catatan resmi pasca konstruksi dari kontraktor untuk membuktikan pekerjaan yang dilaksanakan. Gambar dapat digunakan oleh pemilik atau operator sebagai referensi selama masa kerja perbaikan. Hal ini memungkinkan pemilik untuk merencanakan perubahan atau perluasan.
3. Sebagai demolition drawings apabila suatu konstruksi dihancurkan maka as built dibuat sebagai acuan proses pembongkaran konstruksi. As built digunakan untuk menentukan bagian yang harus dihancurkan dan tidak dihancurkan. 4. Sebagai pemberi informasi penggunaan tanah. Misalnya, selama pekerjaan
konstruksi ada sebuah objek tak terduga ditemukan, didalam as built tidak terdapat objek yang dimaksud, maka objek tersebut dianggap tidak digunakan dan harus dihancurkan.
Pentingnya keempat peran tersebut tidak diimbangi dengan keadaan sesungguhnya di lapangan. Kontraktor cenderung mengabaikan as built. Menurut Peeta (2005) ada empat masalah utama yaitu:
1. Tidak ada kemauan untuk melakukan pekerjaan as built dari pihak kontraktor itu sendiri dan banyaknya pekerjaan yang harus mereka selesaikan terlebih dahulu.
2. Anggapan dari kontraktor bahwa mereka tidak mendapatkan biaya tambahan untuk melakukan pekerjaan survei as built.
3. Masalah koordinasi.
4. Perbedaan pendapat antara yang diinginkan oleh pemilik pekerjaan dan kontraktor.
As built jalan terdiri atas beberapa aspek, mulai horizontal alignment, alinyemen vertikal, penampang melintang dan struktur perkerasan. Penelitian ini berfokus pada penentuan kondisi superelevasi yang termasuk dalam aspek penampang melintang.
1.5.5 Penampang Melintang
Penampang melintang yang digunakan dalam menghitung pekerjaan rekayasa adalah sebuah penampang vertikal, tegak lurus terhadap garis sumbu pada stasiun penuh dan stasiun plus, yang menyatakan batas-batas suatu galian atau timbunan rencana atau yang sudah ada. Penentuan luas potongan melintang menjadi sederhana bila potongan melintang tersebut digambar pada kertas grafik potongan melintang (Bagus, 2015).
Penampang melintang jalan adalah potongan suatu jalan secara melintang tegak lurus sumbu jalan (Sukirman, 1999). Arah penampang melintang di setiap stasiun umumnya diambil tegak lurus terhadap sumbu proyek, dalam lengkung jalan sumbu proyek adalah titik pusat dari lengkung tersebut.
Potongan melintang digambar dengan skala vertikal dan horizontal yang sama, dengan praktek standar 1 inch = 10 ft. Tetapi, bila galian atau timbunan vertikal kecil dibandingkan dengan lebarnya, perbesaran skala vertikal digunakan untuk mencapai ketelitian ekstra dalam menggambar penampang tersebut.
1.5.6 Global Navigation Satellite System (GNSS)
GNSS merupakan singkatan dari Global Navigation Satellite System. GNSS merupakan teknologi gabungan dari beberapa system satelit navigasi untuk menentukan posisi tiga dimensi untuk titik yang ada di permukaan bumi (Abidin, 2000). Sistem yang digunakan oleh GNSS adalah Global Positioning System (GPS) yang dimiliki dan dikelola oleh Amerika Serikat, Global Navigation Satellite System (GLONASS) milik Rusia, Galileo milik Uni Eropa, dan Compass atau Beidou milik Cina (UNOOSA, 2011).
Dengan adanya teknologi GNSS ini, pengukuran posisi suatu titik di permukaan bumi menjadi lebih teliti karena jumlah satelit yang terekam oleh receiver lebih banyak. Namun, dalam pengolahan data pengamatan dibutuhkan suatu transformasi datum untuk mengintegrasikan hasil pengamatan dari beberapa satelit.
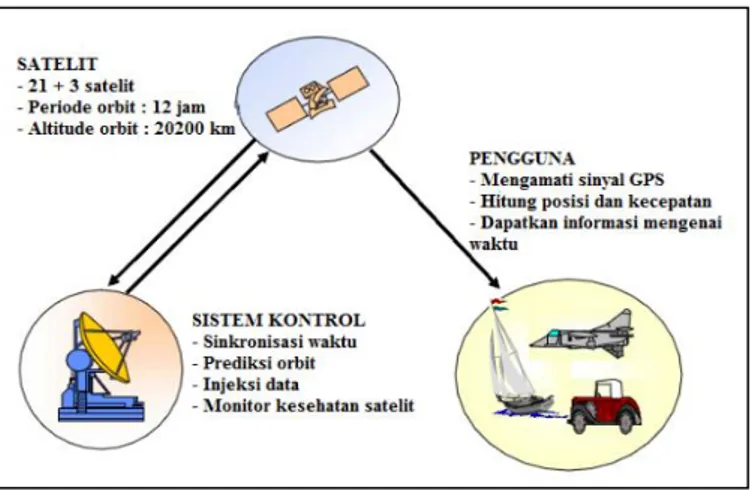
Gambar I.7. Segmen utama dalam teknologi GNSS (Abidin, 2007)
GPS terdiri atas tiga segmen utama, yaitu segmen satelit, segmen kontrol, dan segmen pemakai (Abidin 2000). Segmen satelit terdiri atas satelit-satelit GPS. Segmen kontrol terdiri atas stasiun-stasiun pemonitor dan pengotrol satelit. Segmen pemakai terdiri atas pemakai GPS termasuk alat-alat penerima dan pengolah sinyal data GPS.
I.5.3.1. Penentuan posisi dengan GNSS. Prinsip penentuan posisi dengan GNSS adalah pengikatan ke belakang dengan mengukur jarak dari beberapa satelit yang diketahui posisinya sehingga posisi pengamat dapat dihitung. Penentuan posisi dengan teknologi GNSS menghasilkan koordinat dalam sistem koordinat geodetik (φ, λ, h), koordinat kartesi tiga dimensi (X,Y,Z) dan parameter waktu. Semakin banyak satelit yang dapat diamati maka hasil pengukuran memiliki akurasi yang semakin tinggi. Penetuan posisi dengan teknologi GPS dapat dilakukan dengan dua metode yaitu metode absolut dan metode relatif. (Sunantyo, 1999).
1. Metode absolut (absolute positioning).
Dalam penentuan posisi dengan metode absolut, posisi dapat diketahui melalui pengikatan ke belakang (reseksi) dengan perhitungan jarak, melalui pengamatan secara simultan terhadap minimal empat satelit yang diketahui
koordinatnya. Metode reseksi ini menghasilkan nilai tiga parameter posisi dan satu parameter waktu.
Perolehan posisi metode ini menggunakan data pseudorange dengan menggunakan satu buah receiver (penerima). Secara matematis, penentuan posisinya dijabarkan seperti pada persamaan I.26 s.d I.29.
Pk1(t) = √(u1 − u k)2+ (v1− vuk)2+ (w1− wk)2 − c. dtk ... (I.25) Pk2(t) = √(u2− u k)2+ (v2− vuk)2 + (w2− wk)2 − c. dtk ... (I.26) Pk2(t) = √(u3− u k)2+ (v3− vuk)2 + (w3− wk)2 − c. dtk ... (I.27) Pk4(t) = √(u4− u k)2+ (v4− vuk)2 + (w4− wk)2 − c. dtk ... (I.28)
Dalam hal ini:
c : kecepatan gelombang di dalam medium hampa
dt : beda waktu antara gelombang satelit GNSS saat dipancarkan dan saat diterima
(u, v, w) : posisi koordinat satelit GNSS (earth fix coordinates) dalam sistem kartesi 3D
(u,v,w)k : posisi koordinat receiver dalam sistem koordinat kartesi 3D
Pk1 : jarak antara satelit GNSS ke receiver
Adapun penentuan rumus untuk mendapatkan jarak melalui data fase adalah sebagai berikut :
Li(t) = ρ + dρ + dtrop − dioni+ (dt − Dt) + MCi+ λi. Ni+ rCi ... (I.29)
Dalam hal ini:
Li : λi. ɸi: adalah jarak fase (carrier range) pada frekuensi fi(m),
(I = 1,2)
ρ : jarak geometris antara satelit GNSS dengan receiver dp : kesalahan jarak karena efek ephemeris (orbit)
dtrop : bias karena efek retraksi troposfer (m)
dioni : bias karena efek retraksi ionosfer (m) λi : panjang gelombang dari sinyal (m)
dt, dT : kesalahan dan offset antara jam receiver dan jam satelit (m)
MCi : efek dari multipath pada hasil pengamatan Li
Ni : ambiguitas fase dari pengamatan fase sinyal-sinyal Li (dalam
n gelombang)
rCi : noise hasil pengamatan Li
2. Metode relatif (relative/differential positioning)
Penentuan posisi differensial atau penentuan posisi secara relatif adalah penentuan vektor jarak antara dua stasiun pengamatan, yang dikenal dengan jarak basis (baseline). Posisi suatu titik ditentukan relatif terhadap titik lainnya yang telah diketahui koordinatnya. Penentuan posisi relatif melibatkan setidaknya dua buah receiver GNSS, titik-titik stasiunnya statik (tidak bergerak) maupun bergerak (kinematik), dan pengolahan data umunya dilakukan secara post-processing untuk memperoleh ketelitian yang lebih tinggi (Abidin, 2003). Pada penentuan posisi ini, dilakukan pengurangan data yang diamati oleh dua receiver yang mengamat satelit secara simultan (waktu pengamatan sama).
Pengurangan (differencing) ini bertujuan untuk mereduksi atau mengeliminasi efek kesalahan dan bias. Kesalahan yang dapat dihilangkan adalah kesalahan akipat perbedaan antara jam receiver dan jam satelit. Kesalahan dan bias troposfer, ionosfer, dan efemeris dapat direduksi, sedangkan efek multipath tidak dapat direduksi.
Differencing ini bisa dalam bentuk single difference, double difference, dan triple difference, masing-masing kombinasi linier differencing tersebut saling berbeda dan berbeda penggunaannya pula. Pada akhirnya, differencing ini meningkatkan ketelitian posisi yang didapat dari kondisi penentuan posisi absolut.
Penentuan posisi secara diferensial ini bisa memakai dua metode, yakni dengan data pseudorange dan data carrier phase. Berikut rumus untuk
differencing dengan memakai data pseudorange, dengan asumsi receiver GNSS i dan j mengamat pseudorange L1 ke m satelit secara simultan tersedia pseudorange berikut : Pijk, dalam hal ini k = 1, 2, ... m. Linierisasi persamaan pengamatan pseudorange m single difference dapat dilihat pada persamaan I.30 (Sunantyo, 1999):
ΔPij.1k (t1) = −[𝑢𝑗𝑘(t1)] T
Δrij(t1) + cΔdtij(t1) ... (I.30)
Dalam hal ini:
ΔPij.1k (t1) : hasil single difference tunggal pengamatan pseudorange
Δrij : vektor jarak basis
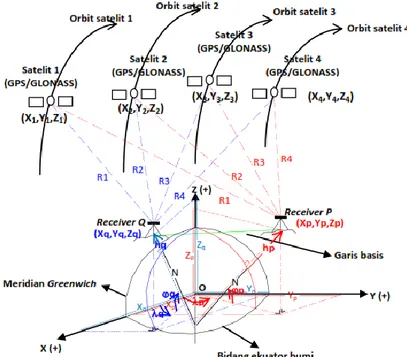
Untuk differencing dengan data carrier phase, dengan titik P sebagai titik referensi dan titik Q adalah titik yang tidak diketahui koordinatnya, A dan B diukur secara simultan dan menghasilkan baseline bPQ beserta komponen vektornya. Formulasi untuk komponen vektor baseline bPQ seperti pada persamaan I.31 (Sunantyo, 2000):
bAB= [ XB− XA YB− YA ZB− ZA ] = [ ΔXAB ΔYAB ΔZAB ] ... (I.31) Dalam hal ini:
bAB : komponen vektor baseline A ke B XA, YA, ZA : koordinat X, Y, dan Z titik A XB, YB, ZB : koordinat X, Y, dan Z titik B ΔXAB : jarak A ke B pada sumbu X ΔYAB : jarak A ke B pada sumbu Y ΔZAB : jarak A ke B pada sumbu Z
Gambar I.8. Differential positioning (Wibowo, 2013)
Keterangan Gambar I.8:
O : pusat sistem koordinat
φ, λ, h : koordinat geodetik titik pengamat Xq, Yq, Zq : koordinat kartesian tiga dimensi titik Q Xp, Yp, Zp : koordinat kartesian tiga dimensi titik P Xi, Yi, Zi : koordinat kartesian tiga dimensi satelit ke-i N : jari-jari kelengkungan vertikal
Ri : jarak dari satelit ke receiver 1.5.7 Continuously Operating Reference Station (CORS)
Perkembangan teknologi penentuan posisi dengan satelit GNSS memunculkan sistem pengadaan titik kontrol dasar modern sebagai referensi penentuan posisi untuk pengukuran dan pemetaan yang bersifat aktif, terus menerus dan dapat diakses secara real time. Sistem titik kontrol modern tersebut adalah CORS (Andriyani, 2012).
CORS merupakan jalinan beberapa stasiun referensi GNSS permanen (base station), dapat merekam data ephemeris GNSS secara kontinu, lalu disimpan dalam
server dan dihitung secara teliti menghasilkan koreksi-koreksi yang dapat diberikan secara real-time kepada receiver GNSS.
CORS di Indonesia pertama kali dioperasikan oleh Bakosurtanal sejak 1996, yang terdiri atas tiga stasiun antara lain Jawa Barat (stasiun 18 BAKO); Medan, Sumatera Utara (stasiun SAMP); dan Parepare, Sulawesi Selatan (stasiun PARE) (Matindas and Subarya, 2009). Bakosurtanal memperluas stasiun CORS hingga pada Oktober 2009 telah berdiri 51 stasiun CORS yang tersebar di seluruh Indonesia. BPN dan LIPI mulai membangun jaringan stasiun CORS sendiri.
Stasiun CORS digunakan untuk sebagai referensi untuk survei dan pemetaan menggunakan GNSS. Penggunaan sistem CORS pada pengukuran GNSS bertujuan untuk mengurangi distorsi dari sinyal yang ditangkap oleh receiver GNSS dan memaksimalkan perhitungan kualitas posisi sesuai dengan model yang digunakan dalam pemrosesan data GNSS sehingga data yang didapatkan memiliki akurasi yang cukup tinggi.
1.5.8 Real Time Kinematic (RTK)
RTK merupakan penentuan posisi dengan metode diferensial/relatif. Jumlah receiver GPS yang digunakan minimal dua buah. Satu receiver GPS disebut base station berdiri di atas titik yang diketahui koordinatnya. Receiver GPS lainnya disebut rover digunakan untuk menentukan koordinat dari suatu titik baik dengan bergerak ataupun diam. Base station mentransmisikan data pseudorange dan/atau data fase ke rover secara real-time untuk penentuan posisi secara akurat. Proses transmisi dari base station ke rover dapat dibantu dengan media radio modem (RTK-Radio) ataupun menggunakan internet (RTK-NTRIP).
Ada tiga komponen penting dalam GPS RTK (Sari, 2010): 1. Stasiun referensi
Stasiun referensi atau base station ini terdiri atas receiver dan antena. Base station ini berfungsi untuk mengolah data diferensial dan melakukan koreksi carrier phase yang dikirimkan via radio modem base ke radio modem rover. 2. Stasiun rover (pengguna)
Rover untuk mengidentifikasi satelit-satelit pada daerah pengamatan dan menerima data diferensial dan koreksi carrier phase dari base station. Koreksi
carrier phase tersebut dikirim via radio link dengan radio modem antara base station dan rover sehingga bisa mendapatkan posisi lebih teliti.
3. Data link (hubungan data) difrerensial
Data link ini berfungsi mengirimkan data diferensial dan koreksi carrier phase dar base station ke rover melalui modem. Kecepatan radio modem dan band frekuensi pada base station dan rover harus sama sehingga proses pengiriman data berlangsung lancar.
Dalam penentuan posisi dengan metode RTK, terdapat tiga jenis solusi pengukuran (Diggelen, 1997), yaitu:
1. Fixed
Fixed solution memiliki artian bahwa rover sudah terhubung dengan base station, dengan ketelitian posisi 1 s.d 5 cm. Ambiguitas fase sudah terkoreksi, jumlah satelit yang ditangkap lebih dari empat, bias multipath terkoreksi dan Link Quality (LQ) sebesar 100%.
2. Float
Pada solusi float, rover terhubung dengan base station dengan ketelitian posisi lebih dari 5 cm. Ambiguitas fase belum terkoreksi dan jumlah satelit yang ditangkap kurang dari empat. Bias multipath pada pengukuran belum terkoreksi.
3. Standalone
Solusi standalone menunjukkan bahwa rover belum terhubung dengan base station. Solusi ini memiliki ketelitian posisi lebih dari 1 m, ambiguitas fase dan bias multipath belum terkoreksi, serta jumlah satelit yang ditangkap kurang dari empat.
1.5.9 Networked Transport of RTCM via Internet Protocol (NTRIP).
NTRIP merupakan teknik baru menggunakan internet untuk streaming dan sharing koneksi diferensial GPS (DGPS) memberikan akurasi penentuan posisi dan navigasi. NTRIP adalah sebuah metode untuk mengirimkan koreksi data GPS (dalam format RTCM) melalui internet. Data yang dikirimkan berupa data pseudorange dan data phase (Sari, 2010)..
Neumann et al., 1997 menyatakan bahwa koreksi data RTCM pada GNSS RTK menggunakan RTCM dengan tipe 18 hingga tipe 21. Tipe 18 dan tipe 20 mengoreksi data fase, sedangkan tipe 19 dan tipe 21 mengoreksi data pseudorange.
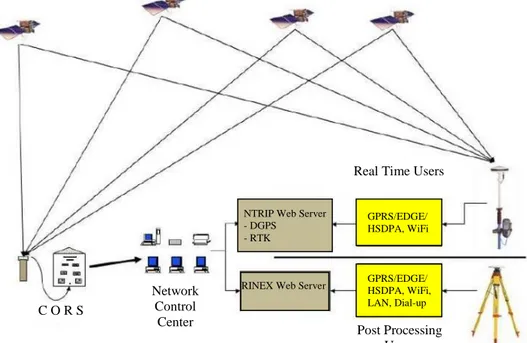
Gambar I.9. Konsep metode pengukuran RTK NTRIP (Sunantyo, 2009)
NTRIP terdiri atas empat komponen sistem yaitu (Hapsoro, 2010) : 1. NTRIP Source
NTRIP Source merupakan proses penyediaan data GNSS secara kontinyu seperti streaming data dari antena GNSS ke NTRIP Server.
2. NTRIP Server
NTRIP Server mentransfer data RTCM kepada NTRIP Caster menggunakan jaringan TCP/IP. NTRIP Server perlu diseujui terlebih dahulu oleh NTRIP Caster dan jika diijinkan maka data RTCM dapat dikirim ke NTRIP Caster. NTRIP Server juga mengidentifikasi nama NTRIP Source dan parameter informasi lainnya yang berhubungan dengan NTRIP Source.
3. NTRIP Caster
NTRIP Caster adalah sebuah server internet yang mengatur dan membedakan arah datang dan perginya aliran data NTRIP Server. Caster memeriksa pesan permintaan dari NTRIP Client dan Server memeriksa apakah Client Server
C O R S
Network Control
Center
NTRIP Web Server - DGPS - RTK
RINEX Web Server GPRS/EDGE/ HSDPA, WiFi GPRS/EDGE/ HSDPA, WiFi, LAN, Dial-up Post Processing Users Real Time Users
sudah teregistrasi dan sah untuk menerima atau memberikan aliran data RTCM.
4. NTRIP Client
NTRIP Client menerima streams data RTCM, NTRIP Client terlebih dahulu harus diterima oleh NTRIP Caster, jika diterima maka NTRIP Client menerima data GNSS dari NTRIP Caster. Untuk mendapatkan data RTCM, client harus mengirim parameter yang diakses (pengguna ID dan password) pada NTRIP Caster.
1.5.10 Simpangan Baku Pengukuran
Ketelitian atau presisi adalah tingkat kedekatan nilai ukuran terhadap nilai lainnya. Dalam hal ini ketelitian didefinisikan sebagai tingkat kedekatan hasil pengukuran yang berulang terhadap obyek yang sama. Jika hasil itu berdekatan, maka disebut ketelitian tinggi, jika hasil itu terpaut jauh, maka disebut memiliki ketelitian yang rendah. Ketelitian diindikasikan dengan penyebaran dari distribusi kemungkinan, semakin kecil distribusinya maka ketelitiannya semakin tinggi dan sebaliknya (Michail and Gracie dalam Tarigan, 2010). Nilai ketelitian ditunjukkan pada nilai simpangan baku pengukuran. Perhitungan simpangan baku dapat dilakukan dengan persamaan I.32 dan I.33.
σ = √Σ(xi−x̅)2
n ... (I.32) σ = √Σ(xi−x̅)2
n−1 ... (I.33)
Dalam hal ini:
σ : simpangan baku
xi : nilai ukuran ke i
x̅ : nilai rata-rata hasil ukuran n : banyaknya ukuran
Rumus I.33 digunakan untuk menghitung data yang berupa populasi, sedangkan untuk data sampel menggunakan rumus 1.34.
1.5.11 Uji Statistik
Uji statistik digunakan untuk membandingkan suatu hasil hitungan dengan hasil dari hitungan (perataan) sebelumnya, hasil dari hitungan (perataan), dan nilai teoritis dari populasi (Widjajanti, 2011). Uji statistik menghasilkan keputusan apakah hasil hitungan konsisten dengan nilai asumsi dan menggambarkan suatu nilai dari populasi. Dalam usaha untuk mencapai suatu keputusan, diperlukan asumsi tentang populasi yang bersangkutan (hipotesa). Hipotesa tersebut pada umumnya menyatakan tentang distribusi probabilitas dari populasi variabel acak.
Uji signifikansi parameter digunakan untuk mengetahui apakah nilai hasil hitungan secara stastistik berbeda signifikan dengan hipotesis. Pengujian signifikansi parameter ini menggunakan distribusi student. Pengujian ini dilakukan untuk sampel yang ukurannya kecil. Model matematis yang digunakan dalam uji signifikansi dapat dilihat pada persamaan I.34.
t0 = X̅−μ0 S √n
... (I.34)
X
̅ : rata–rata dari sampel S : simpangan baku sampel
μ0 : kriteria penguji hipotesis α : derajat kepercayaan
n : jumlah sampel
Penolakan hipotesis terjadi apabila nilai memenuhi kriteria pada persamaan I.35 atau I.36. Penolakan hipotesis mengindikasikan nilai parameter memiliki perbedaan yang signifikan Sebaliknya penerimaan hipotesis menunjukkan nilai parameter memiliki perbedaan yang tidak signifikan.
t0 > tα 2⁄ ,n−1 ... (I.35) t0 < −tα 2⁄ ,n−1 ... (I.36)
Dalam hal ini:
t0 : nilai student hasil hitungan
1.5.12 Autocad Land Desktop
AutoCAD Land Deskop adalah suatu program grafis yang handal dalam menangani gambar yang berbasis vektor. Kemampuan-kemampuan sistem CAD (Computer Aided Design) membantu dalam mengolah dan menyajikan data hasil pekerjaan pemetaan. Analisa spasial yang dimiliki oleh setiap sistem CAD ini sangat bervariasi, diantaranya berupa perhitungan jarak (distance), keliling, luas, volume, pembuatan garis kontur dan lain sebagainya. Fungsi-fungsi pada AutoCAD menyediakan berbagai fasilitas untuk memodifikasi gambar pada peta.
I.9. Hipotesis
Superelevasi dapat dicari menggunakan persamaan I.18. Nilai yang berubah dari persamaan tersebut adalah koefisien gesek perkerasan aspal (f). Nilai koefisien gesek perkerasan aspal (f) menurut Standar Nasional Indonesia untuk Geometri Jalan Perkotaan tahun 2004 memiliki nilai dari 0,012 hingga 0,017. Karena hanya nilai f yang berubah maka superelevasi hanya dipengaruhi nilai perubahan f. Rentang perubahan f sebesar 0,005 atau 0,5%. Berdasarkan hasil pengukuran, perbedaan superelevasi hasil pengukuran dengan superelevasi as-built diduga dalam rentang ±0,5%.