APLIKASI SISTEM
HIERARCHICAL FUZZY LOGIC CONTROL
PADA
LAMPU LALU LINTAS
Yunan Ari Yuwono dan Abdul Halim
Departemen Teknik Elektro, Fakultas Teknik Universitas Indonesia
Abstrak: Lalu lintas saat ini merupakan bagian penting yang tidak terpisahkan dari
kehidupan manusia, terlebih kondisi kota-kota besar yang semakin berkembang termasuk bertambahnya jumlah kendaraan dengan kondisi infrastruktur yang tidak dapat ditambah lagi. Maka dibutuhkan sebuah sistem kendali yang dapat menangani masalah tersebut. Pada skripsi ini akan dibahas model sistem lalu lintas menggunakan model antrian dengan menggunakan aplikasi sistem Hierarchical Fuzzy Logic Control (HFLC). Pola masukan kendaraan yang digunakan adalah pola persebaran poisson yang dapat mewakili dengan kondisi sebenarnya. Simulasi ini akan diuji dengan lamanya waktu lampu hijau yang berbeda-beda untuk melihat hasil yang paling baik waktu tunggu rata-rata kendaraannya. Jumlah masukan kendaraan juga akan dibuat dengan jumlah yang berbeda agar bisa dilihat sejauh mana kemampuan sistem kendali tersebut. Semua perancangan aplikasi akan dibuat pada Simulink MATLAB dengan pembagian yang memudahkan jika nantinya untuk direalisasikan pada sistem yang sesungguhnya. Hasil dari waktu tunggu rata-rata ketika sistem lampu lalu lintas menggunakan model HFLC lebih baik dibandingkan dengan menggunakan model kendali tetap. Terlebih saat jumlah keluaran kendaraan berubah secara tiba-tiba.
Kata kunci: Antrian; HFLC; kendali tetap; lalu lintas; persimpangan terisolasi; waktu tunggu rata-rata.
Abstract: Traffic these days is an inseparable part of daily human activities, especially in
large developing cities with an increasing number of vehicles coupled together with a dead-end infrastructure. Therefore, a control system that could solve the aforementioned problem is a necessity. In this thesis, a traffic model system using the queuing model utilizing Hierarchical Fuzzy Logic Control system application will be discussed. The incoming vehicle pattern is modeled on Poisson Distribution which is representative of real life conditions. The simulation will be tested on different durations of green light to measure the best vehicle average waiting time. The simulation will also be tested on different amount of incoming vehicles to measure the system capabilities. All designs will be created using MATLAB Simulink software with a simplified allocation if it was to be realized on real life. The results of the average waiting time when the traffic light system use HFLC model is better than using a fixed control models, especially when the number of vehicles output changes suddenly. Keywords: Average Waiting Time; Fix Control; HFLC; Isolated Intersection; Queuing; Traffic.
I. PENDAHULUAN
Jumlah penduduk di Indonesia terus meningkat. Peningkatan rasio jumlah penduduk ini berbanding lurus dengan peningkatan jumlah kendaraan yang berada di jalan raya. Sejak akhir tahun 1990 khususnya, jumlah kendaraan meningkat pesat (Polda Metro Jaya 2010). Sebelum tahun 1990-an, jumlah kendaraan belum terlalu banyak. Permasalahan lalu lintas pada saat ini masih belum terlalu terlihat. Setelah tahun 1990-an, jumlah kendaraan yang berada di jalan
raya terus meningkat. Maka perlu adanya penyiasatan agar tidak menimbulkan kemacetan di jalan raya.
Kelancaran lalu lintas di jalan raya merupakan kebutuhan yang selalu dibutuhkan hampir di setiap wilayah, baik di Negara maju maupun di Negara berkembang. Jumlah kendaraan di suatu wilayah yang terus bertambah, seperti kota DKI Jakarta yang merupakan pusat pemerintahan dan pusat perrekonomian Indonesia, maka tingkat kesulitan untuk menciptakan lalu lintas yang lancar juga semakin bertambah. Kemacetan lalu lintas terjadi ketika kendaraan yang terlalu banyak di jalan raya sedangkan infrastruktur jalan sudah mencapai batas kapasitasnya. Solusi awal yang dapat dilakukan adalah dengan melakukan perluasan infrastruktur di wilayah tersebut. Akan tetapi, dengan wilayah terbatas dan perluasan infrastruktur sudah tidak dapat dimungkinkan sedangkan jumlah kendaraan di lalu lintas terus meningkat, maka diperlukan pengaturan lalu lintas yang dapat mengatasi kemacetan. Salah satu cara untuk dapat mengatasi lalu lintas yang mengalami kemacetan dan tidak dapat lagi melaukan perluasan infrastruktur adalah dengan membuat pemodelan yang dapat menjadikan lampu lalu lintas yang merupakan salah satu alat untuk mengatur lalu lintas, dapat menyelesaikan antrian di persimpangan lampu lalu lintas. Targetnya adalah setiap jalur pada persimpangan tersebut mengawali lampu merah selanjutnya tanpa ada antrian yang tersisa atau minimal tidak mengalami peningkatan jumlah antrian, atau juga setiap kendaraan memiliki waktu tunggu yang sangat minim untuk dapat keluar dari persimpangan. Pemodelan untuk pengaturan lampu lalu lintas seperti yang telah dijelaskan di atas, telah berhasil diterapkan di beberapa Negara dalam mengatasi permasalahan lalu lintas, misalnya Amerika dan juga Australia (Ortuzar & Willumsen, 1990).
Saat ini masih banyak pada lalu lintas, khususnya di Negara berkembang, yang masih menggunakan model kendali tetap pada sistem lalu lintas. Meskipun sudah banyak sekali berkembang pemodelan lampu lalu lintas yang menggunakan Intelligent Transportation Systems (ITS) untuk mengatasi permasalahan kemacetan. Dalam skripsi ini, akan dibahas dampak lama lampu hijau pada lalu lintas terhadap waktu tunggu rata-rata kendaraan yang merupakan parameter umum yang digunakan untuk melihat baik atau tidaknya sistem pada lalu lintas. Model sistem kendali lampu lalu lintas ini menggunakan metode antrian dengan kendali tetap dan kendali fuzzy khususnya Hierarchical Fuzzy Logic Control (HFLC) pada perempatan terioslasi. Semua simulasi dilakukan dengan menggunakan software Simulink MATLAB.
II. TINJAUAN TEORITIS A. Persimpangan dengan Sinyal Empat-Fase
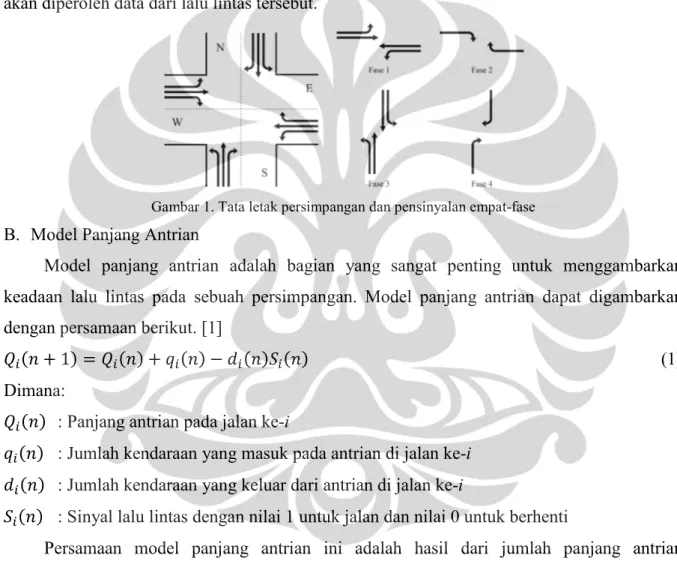
Tata letak persimpangan dengan pendekatan empat-fase ditunjukkan pada Gambar 1. Pada persimpangan terisolasi, dilakukan pendekatan dengan masing-masing jalan memiliki enam jalur dan terbagi menjadi dua arah. Setiap jalan masing-masing dilengkapi dengan dua detektor yang terletak masing-masing 10 meter dan 120 meter dari garis henti. Jalan di setiap arah berarti memiliki tiga jalur yang dapat digunakan pengguna jalan, dengan panjang jalan yang dapat dideteksi kendaraannya adalah sepanjang 110 meter. Dari detektor ini nantinya akan diperoleh data dari lalu lintas tersebut.
Gambar 1. Tata letak persimpangan dan pensinyalan empat-fase
B. Model Panjang Antrian
Model panjang antrian adalah bagian yang sangat penting untuk menggambarkan keadaan lalu lintas pada sebuah persimpangan. Model panjang antrian dapat digambarkan dengan persamaan berikut. [1]
ܳሺ݊ + 1ሻ = ܳሺ݊ሻ + ݍሺ݊ሻ − ݀ሺ݊ሻܵሺ݊ሻ (1) Dimana:
ܳሺ݊ሻ : Panjang antrian pada jalan ke-i
ݍሺ݊ሻ : Jumlah kendaraan yang masuk pada antrian di jalan ke-i
݀ሺ݊ሻ : Jumlah kendaraan yang keluar dari antrian di jalan ke-i
ܵሺ݊ሻ : Sinyal lalu lintas dengan nilai 1 untuk jalan dan nilai 0 untuk berhenti
Persamaan model panjang antrian ini adalah hasil dari jumlah panjang antrian sebelumnya dengan jumlah kendaraan yang masuk dan dikurangi dengan jumlah kendaraan yang keluar. Jika pada kondisi lampu merah (ܵ = 0), maka persamaan tidak dikurangi dengan jumlah kendaraan yang keluar (݀). Sebaliknya jika pada kondisi lampu hijau (ܵ =
C. Model Waktu Tunggu Kendaraan
Waktu tunggu rata-rata kendaraan digunakan untuk mengevaluasi kinerja dari model sistem yang digunakan. Mengintegralkan model panjang antrian dengan perubahan waktu dan membaginya dengan jumlah kendaraan yang melewati persimpangan tersebut, menghasilkan waktu tunggu dari kendaraan. Model persamaan dari waktu tunggu rata-rata kendaraan dapat dituliskan sebagai berikut. [3]
ܦሺ݊ሻ =ܹܣሺ݊ሻ
ሺ݊ሻ ሺ2ሻ Dimana:
ܦሺ݊ሻ : Waktu tunggu rata-rata kendaraan di jalan-i
ܹሺ݊ሻ : Jumlah keterlambatan kendaraan di jalan-i
ܣሺ݊ሻ : Jumlah kendaraan yang keluar dari jalan-i
Model persamaan untuk jumlah keterlambatan kendaraan di jalan-i dari awal periode [1] dan model persamaan dari jumlah kendaraan yang keluar dari persimpangan di jalan-i dapat dituliskan sebagai berikut.
ܹሺ݊ + 1ሻ = ܹሺ݊ሻ + ܶܳሺ݊ሻ + ܶݍሺ݊ሻ − ܶ݀ሺ݊ሻܵሺ݊ሻ (3)
ܣሺ݊ + 1ሻ = ܣሺ݊ሻ + ݀ሺ݊ሻܵሺ݊ሻ (4) Variabel T menunjukkan nilai dari panjang waktu interval yang terdiskritisasi. Jika nilai
T cukup singkat, kedatangan kendaraan dapat diasumsikan sama dalam setiap interval waktu. Untuk mencari nilai rata-rata waktu tunggu dari seluruh jalan di persimpangan, maka nilai dijumlahkan seluruh nilai jumlah keterlambatan kendaraan di jalan dan dibagi dengan seluruh kendaraan yang melintas di persimpangan terebut. Persamaan matematikanya dapat dituliskan sebagai berikut. [3]
ܦ = ൬ܹܣ
൰ ସ ୀଵ
ሺ5ሻ
D. Model Keluaran Antrian
Kendaraan yang keluar dari antrian di jalan-i merupakan nilai terkecil antara penjumlahan banyaknya kendaraan pada antrian (ܳ) dan banyaknya kendaraan yang masuk pada jalan tersebut (ݍ), dengan nilai saturasi maksimal kendaraan yang dapat keluar dari antrian pada jalan tersebut (݀௦). Setiap jalan mempunyai nilai saturasi maksimal untuk dapat mengeluarkan kendaraan ketika kondisi antrian pada jalan tersebut cukup padat atau banyak sekali. Pada kondisi tersebut ada tiga parameter yang berpengaruh, yaitu parameter batas nilai kendaraan yang keluar ketika antrian penuh (݀௦.), jumlah kendaraan yang masuk (ݍ) dan
kondisi saturasi pada jalan tersebut (ߚ). Ketika kondisi antrian ditambah kendaraan yang masuk pada jalan tersebut dibawah dari nilai saturasi maksimal yang dapat dikeluarkan, maka banyaknya kendaraan yang keluar adalah banyaknya jumlah antrian ditambah dengan banyaknya kendaraan yang masuk.
Persamaan jumlah kendaraan yang keluar dari antrian di jalan-i, dalam interval waktu T
dapat dituliskan dengan sebagai berikut. [1]
݀ሺ݊ሻ = min൫ܳሺ݊ሻ + ݍሺ݊ሻ, ݀௦ሺ݊ሻ൯ (6) Nilai saturasi dari kendaraan yang keluar dari antrian di jalan-i (݀௦) dapat dituliskan dengan persamaan sebagai berikut. [1]
݀௦ሺ݊ሻ = ݀௦.ሺ݊ሻ + ߚݍሺ݊ሻ (7)
Dimana:
݀ሺ݊ሻ : Jumlah kendaraan yang keluar dari antrian di jalan-i
݀௦ሺ݊ሻ : Nilai saturasi kendaraan yang keluar dari antrian di jalan-i
ߚ : Parameter kondisi lalu lintas
݀௦.ሺ݊ሻ : Nilai batas keluar kendaraan di jalan-i ketika antrian penuh
Setiap jalan pada lalu lintas tidak selalu lancar tanpa adanya hambatan. Ada kondisi-kondisi yang membuat kelancaran pada jalan tersebut menjadi terhambat. Meskipun tidak disebutkan secara detail bagaimana kondisi hambatan tersebut, sudah sepantasnya parameter ini tetap diperhitungkan. Parameter beta (ߚ) adalah pameter yang menggambarkan kondisi tersebut pada jalan-i apakah dalam keadaan lancar atau tidak, dengan nilai antara 0 (nol) sampai dengan 1 (satu). Kondisi tersebut dibagi menjadi empat kondisi, yaitu tidak saturasi (lancar), saturasi (tidak lancar), sangat saturasi (sangat tidak lancar), dan tidak stabil. Pembagian parameter dapat dilihat pada Tabel 1. [1]
Tabel 1. Kondisi lalu lintas berdasarkan nilai ࢼ
Kondisi Lalu Lintas ࢼ ሺ࢈ࢋ࢚ࢇሻ
Tidak Saturasi ߚ ≥ 0.7
Saturasi 0.4 ≤ ߚ ≤ 0.6
Sangat Saturasi 0.1 ≤ ߚ ≤ 0.3
Tidak Stabil ߚ = 0
E. Arsitektur Model HFLC
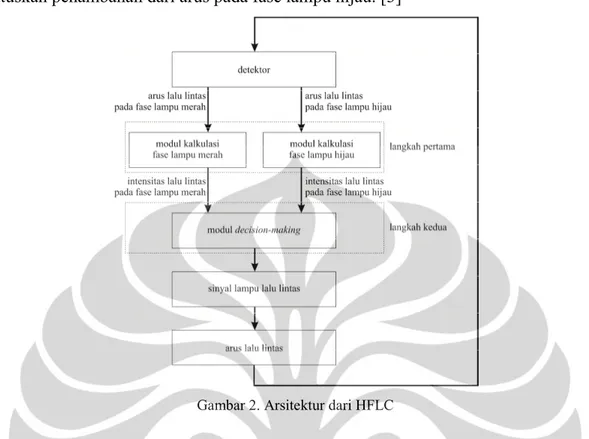
Arsitektur dari HFLC yang digunakan untuk sinyal empat-fase pada persimpangan ditunjukkan pada Gambar 2. Model ini terdiri dari dua langkah dan tiga model logika fuzzy. Langkah pertama terdapat dua modul logika fuzzy untuk mengkalkulasi intensitas lalu lintas
di jalan yang sedang berada pada fase lampu hijau dan berikut jalan yang berada pada fase lampu merah berturut-turut. Langkah kedua terdapat satu modul logika fuzzy untuk memutuskan penambahan dari arus pada fase lampu hijau. [3]
Gambar 2. Arsitektur dari HFLC
Modul kalkulasi fase lampu hijau mempertimbangkan intensitas lalu lintas dari jalan yang mengalami fase lampu hijau menurut informasi dari detektor dan mengirimkannya ke modul decision-making (pengambil keputusan). Modul kalkulasi fase merah juga mempertimbangkan intensitas lalu lintas mengikuti jalan yang sedang mengalami fase lampu merah menurut informasi dari detektor dan mengirimkannya ke modul pengambil keputusan. Menurut data yang diterima mengenai intensitas lalu lintas, modul pengambil keputusan akan menentukan berapa banyak penambahan pada jalan yang mengalami fase lampu hijau.
F. Desain Modul Kalkulasi
Persimpangan sinyal empat-fase seperti yang ditunjukkan pada Gambar 1, untuk semua fase memiliki arus saturasi yang mungkin saja berbeda antara satu dengan yang lainnya. Baik arus lalu lintas maupun antrian kendaraan akan secara penuh menggambarkan kondisi nyata permintaan lalu lintas dari setiap fase. Maka menjadi penting memperkenalkan intensitas lalu lintas untuk menggambarkan permintaan lalu lintas dari setiap fase.
Modul kalkulasi lalu lintas logika fuzzy merupakan salah satu bagian dari model HFLC. Tujuan dari modul ini adalah untuk dengan teliti mengkalkulasi intensitas dari arus lalu lintas pada jalan yang mengalami fase lampu hijau dan berikut fase lampu merah. Nilai masukan dan keluaran dari modul kalkulasi logika fuzzy akan dijelaskan dibawah ini.
1) Nilai masukan dari modul kalkulasi logika fuzzy: Nilai masukan dari modul kalkulasi fase lampu hijau adalah sebagai berikut:
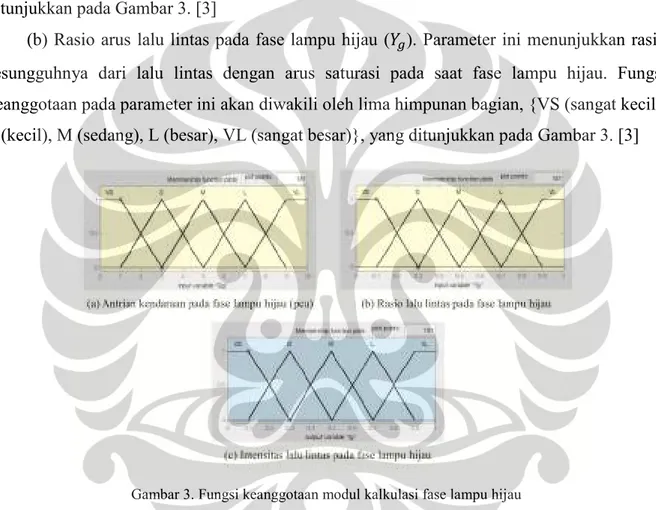
(a) Antrian kendaraan pada fase lampu hijau (ܳ). Parameter ini menunjukkan banyaknya kendaraan yang menunggu diantara dua detektor untuk melintasi persimpangan pada saat fase lampu hijau. Faktor skalanya adalah ܭ = 10/ܳ, dimana ܳ adalah batas tertinggi kendaraan yang dapat dideteksi diantara dua detektor. Fungsi membership
(keanggotaan) pada parameter ini akan diwakili oleh lima sub-sets (himpunan bagian), {VS (sangat pendek), S (pendek), M (sedang), L (panjang), VL (sangat panjang)}, yang ditunjukkan pada Gambar 3. [3]
(b) Rasio arus lalu lintas pada fase lampu hijau (ܻ). Parameter ini menunjukkan rasio sesungguhnya dari lalu lintas dengan arus saturasi pada saat fase lampu hijau. Fungsi keanggotaanpada parameter ini akan diwakili oleh lima himpunan bagian, {VS (sangat kecil), S (kecil), M (sedang), L (besar), VL (sangat besar)}, yang ditunjukkan pada Gambar 3. [3]
Gambar 3. Fungsi keanggotaan modul kalkulasi fase lampu hijau
Nilai masukan dari modul kalkulasi fase lampu merah adalah sebagai berikut:
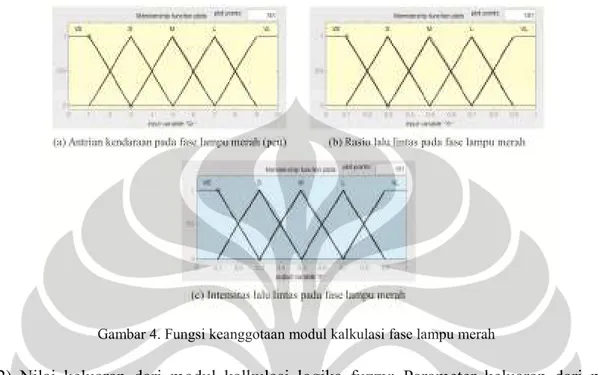
(a) Antrian kendaraan pada fase lampu hijau (ܳ). Parameter ini menunjukkan banyaknya kendaraan yang menunggu diantara dua detektor untuk melintasi persimpangan pada saat fase lampu merah. Faktor skalanya adalah ܭ = 10/ܳ, dimana ܳ adalah batas tertinggi kendaraan yang dapat dideteksi diantara dua detektor. Fungsi keanggotaan pada parameter ini akan diwakili oleh lima himpunan bagian, {VS (sangat pendek), S (pendek), M (sedang), L (panjang), VL (sangat panjang)}, yang ditunjukkan pada Gambar 4. [3]
(b) Rasio arus lalu lintas pada fase lampu hijau (ܻ). Parameter ini menunjukkan rasio sesungguhnya dari lalu lintas dengan arus saturasi pada saat fase lampu merah. Fungsi keanggotaanpada parameter ini akan diwakili oleh lima himpunan bagian, {VS (sangat kecil), S (kecil), M (sedang), L (besar), VL (sangat besar)}, yang ditunjukkan pada Gambar 4. [3]
Gambar 4. Fungsi keanggotaan modul kalkulasi fase lampu merah
2) Nilai keluaran dari modul kalkulasi logika fuzzy: Parameter keluaran dari modul kalkulasi fase lampu hijau adalah intensitas lalu lintas dari fase lampu hijau (ܫ). Parameter ini menunjukkan urgensi dari permintaan lalu lintas pada fase lampu hijau. Fungsi keanggotaan pada parameter ini akan diwakili oleh lima himpunan bagian, {VS (sangat kecil), S (kecil), M (sedang), L (besar), VL (sangat besar)}, yang ditunjukkan pada Gambar 3. Parameter keluaran dari modul kalkulasi fase lampu merah adalah intensitas lalu lintas dari fase berikutnya (ܫ). Parameter ini menunjukkan urgensi dari permintaan lalu lintas pada fase lampu merah. Fungsi keanggotaan pada parameter ini akan diwakili oleh lima himpunan bagian, {VS (sangat kecil), S (kecil), M (sedang), L (besar), VL (sangat besar)}, yang ditunjukkan pada Gambar 4. [3]
G. Desain Modul Pengambil Keputusan
Modul pengambil keputusan logika fuzzy adalah salah satu bagian yang juga penting dari model HFLC. Tujuan dari bagian ini adalah untuk mengoptimalkan pemilihan sinyal waktu (memperpanjang sinyal waktu pada fase lampu hijau atau tidak dari nilai minimum lama lampu hijau) dengan mempertimbangkan intensitas lalu lintas dari fase lampu hijau dan fase lampu merah. Nilai masukan dan keluaran dari parameter pada modul ini akan dijelaskan sebagai berikut.
1) Nilai masukan dari modul pengambil keputusan logika fuzzy: Nilai masukan dari modul ini adalah nilai keluaran dari modul kalkulasi lalu lintas logika fuzzy. Fungsi keanggotaan ditunjukkan berturut-turut pada Gambar 3 dan Gambar 4.
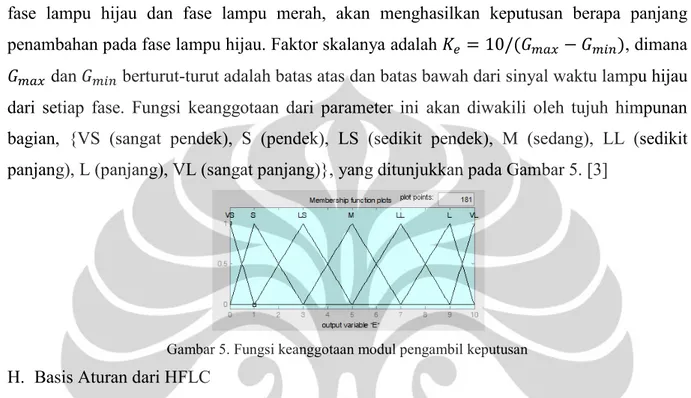
2) Nilai keluaran dari modul pengambil keputusan logika fuzzy: Nilai keluaran dari modul ini adalah perpanjangan dari fase lampu hijau (ܧ). Menurut intensitas lalu lintas dari fase lampu hijau dan fase lampu merah, akan menghasilkan keputusan berapa panjang penambahan pada fase lampu hijau. Faktor skalanya adalah ܭ = 10/ሺܩ௫− ܩሻ, dimana
ܩ௫ dan ܩ berturut-turut adalah batas atas dan batas bawah dari sinyal waktu lampu hijau dari setiap fase. Fungsi keanggotaan dari parameter ini akan diwakili oleh tujuh himpunan bagian, {VS (sangat pendek), S (pendek), LS (sedikit pendek), M (sedang), LL (sedikit panjang), L (panjang), VL (sangat panjang)}, yang ditunjukkan pada Gambar 5. [3]
Gambar 5. Fungsi keanggotaan modul pengambil keputusan
H. Basis Aturan dari HFLC
Terdapat tiga basis aturan dari model HFLC. Dua diantaranya memiliki hubungan dengan modul kalkulasi logika fuzzy dan yang lainnya dengan modul pengambil keputusan logika fuzzy. Basis aturan dibangun atas kombinasi dari variabel masukan dan keluaran. Secara umum metode modus Ponens digunakan untuk membuat basis aturan. Hasil basis aturandari modul kalkulasi logika fuzzy terbentuk 25 aturan. Contoh basis aturandari modul kalkulasi disajikan pada Tabel 2 dan Tabel 3. [3]
Tabel 2. Aturan modul kalkulasi pada fase lampu hijau
Tabel 3. Aturan modul kalkulasi pada fase lampu merah
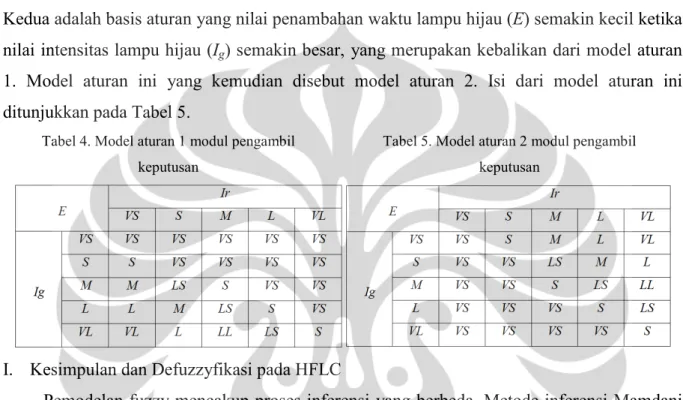
Terdapat 25 aturan juga di dalam basis aturan dari modul pengambil keputusan logika fuzzy. Aturan dari modul pengambil keputusan yang akan digunakan terdapat dua macam.
Pertama adalah model basis rules yang nilai penambahan waktu lampu hijau (E) semakin kecil ketika nilai intensitas lalu lintas dari fase lampu merah (Ir) semakin besar. Jadi, saat nilai
Ir dan Ig kecil, maka waktu lama lampu hijau akan ditambahkan sangat sedikit. Ketika nilai Ig
semakin besar, maka penambahan dari waktu minimal lama lampu hijau akan semakin besar saat nilai Ir kecil. Sedangkan saat nilai Ir semakin besar saat nilai Ig besar, penambahan
terhadap waktu minimal lama lampu hijau akan semakin kecil. Model aturan ini yang kemudian disebut model aturan 1. Isi dari model aturan ini ditunjukkan pada tabel 4 [3]. Kedua adalah basis aturan yang nilai penambahan waktu lampu hijau (E) semakin kecil ketika nilai intensitas lampu hijau (Ig) semakin besar, yang merupakan kebalikan dari model aturan
1. Model aturan ini yang kemudian disebut model aturan 2. Isi dari model aturan ini ditunjukkan pada Tabel 5.
Tabel 4. Model aturan 1 modul pengambil keputusan
Tabel 5. Model aturan 2 modul pengambil keputusan
I. Kesimpulan dan Defuzzyfikasi pada HFLC
Pemodelan fuzzy mencakup proses inferensi yang berbeda. Metode inferensi Mamdani (maksimium-minimum) diterapkan dalam model HFLC. Dalam proses maksimum-minimum, nilai-nilai minimal keanggotaan keluaran aturan yang digunakan adalah yang pertama dipilih, kemudian maksimum dari minimum tersebut telah ditetapkan. Proses ini diterapkan pada semua aturan yang berlaku dan bentuk geometris yang diperoleh. Maka proses defuzzifikasi diterapkan untuk mendapatkan nilai crisp. Defuzzifikasi berarti pemetaan nilai-nilai fuzzy untuk nilai crisp. Disebabkan masalah pada struktur, metode Center of Gravity digunakan untuk defuzzifikasi dari model HFLC.
III. METODE PENILITIAN
Pada skripsi ini, perancangan dibagi menjadi dua model besar. Pertama adalah model perancangan dengan menggunakan sistem kendali tetap untuk melihat waktu tunggu rata-rata dari kendaraan untuk bisa keluar dari perempatan. Kedua adalah model perancangan dengan menggunakan sistem kendali fuzzy, yaitu kendali HFLC, untuk melihat waktu tunggu
rata-rata dari kendaraan untuk bisa keluar dari perempatan. Semua perancangan dilakukan dengan menggunakan program Simulink MATLAB.
Perancangan sistem ini secara umum adalah penggabungan dari seluruh model untuk melakukan simulasi sistem kendali pada lalu lintas di persimpangan terisolasi. Baik itu komponen perhitungan panjang antrian (ܳ), jumlah keterlambatan kendaraan di jalan (ܹ), waktu tunggu (ܦ), pergantian sinyal tiap fase (ܵ), pola kedatangan kendaraan (ݍ), pola keluaran kendaraan (݀) dan sistem kendali yang digunakan baik kendali tetap maupun kendali fuzzy.
A. Sistem Kendali Tetap
Lampu lalu lintas dengan menggunakan kendali tetap adalah dimana lampu lalu lintas disetiap jalur di perempatan menggunakan nilai tetap untuk lama waktu lampu hijau disetiap fase yang ada. Lama lampu hijau pada setiap fase bisa jadi sama atau juga berbeda. Hal ini tergantung berapa nilai yang ingin diberikan pada fase tersebut, dan nilai tersebut berubah. Kita bisa memberikan nilai lama lampu hijau sesuai dengan data masukan kendaraan yang biasanya masuk pada jalur di perempatan tersebut. Akan tetapi pada sistem kendali tetap ini tidak dapat menyesuaikan lama waktu lampu hijau jika terjadi perbedaan masuk kendaraan pada suatu jalur yang tidak sesuai dengan prediksi awal ketika memberikan nilai pada kendali tersebut.
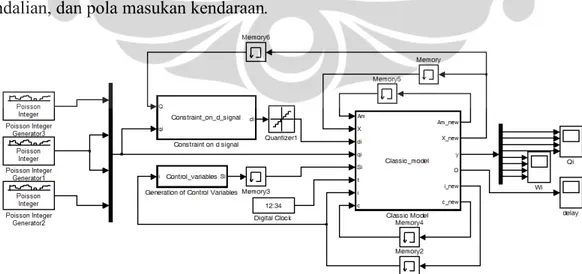
Dari perancangan secara keseluruhan, sistem kendali tetap ini dibagai menjadi empat perancangan bagian yang mempunyai peran masing-masing dari simulasi ini. Hal tersebut dilakukan untuk memudahkan pembagian peran dari sistem. Hal ini dilakukan juga untuk mempermudah jika sistem ini akan diterapkan pada sistem lalu lintas yang sesungguhnya. Empat bagian tersebut adalah model klasik,batasan pada sinyal-d, perubahan variabel pengendalian, dan pola masukan kendaraan.
B. Sistem HFLC
Lampu lalu lintas dengan menggunakan HFLC adalah dimana lampu lalu lintas disetiap jalur di perempatan nilainya ditentukan dari prediksi yang dilakukan oleh sistem HFLC, dengan membandingkan panjang antrian (Qi) dan juga rasio arus lalu lintas (Yi) pada jalan
yang mengalami kondisi lampu hijau dan lampu merah. Lama lampu hijau pada setiap fase bisa jadi sama atau juga berbeda. Hal ini tergantung dengan hasil keluaran kendali fuzzy dengan melihat nilai dari Qi dan Yi. Aturan yang digunakan untuk kendali fuzzy terdapat dua
model yang dimana akan menentukan waktu tunggu dari kendaraan.
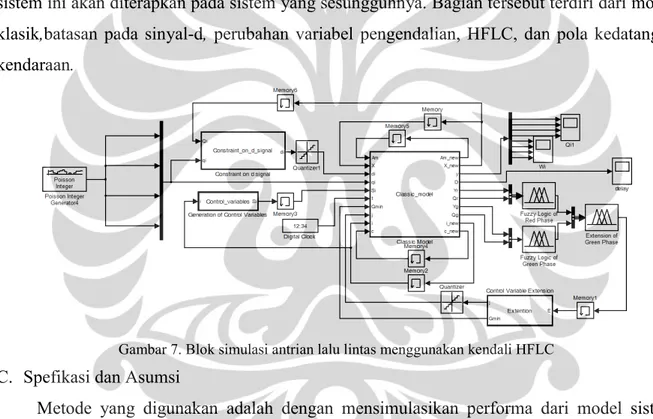
Dari perancangan secara keseluruhan, sistem HFLC ini dibagai menjadi lima perancangan bagian yang mempunyai peran masing-masing dari simulasi ini. Hal tersebut dilakukan untuk memudahkan pembagian peran dari sistem. Hal ini juga mempermudah jika sistem ini akan diterapkan pada sistem yang sesungguhnya. Bagian tersebut terdiri dari model klasik,batasan pada sinyal-d, perubahan variabel pengendalian, HFLC, dan pola kedatangan kendaraan.
Gambar 7. Blok simulasi antrian lalu lintas menggunakan kendali HFLC
C. Spefikasi dan Asumsi
Metode yang digunakan adalah dengan mensimulasikan performa dari model sistem kendali tetap dan model sistem HFLC. Dengan menggunakan model lalu lintas empat-fase, berikut asumsi yang digunakan pada simulasi.
1) Perempatan dengan empat arah jalan dan setiap jalan memiliki 6 buah jalur dengan dua arah.
2) Jumlah masukan kendaraan yang diuji adalah 1452 kendaraan/jam/jalan sampai 3483 kendaraan/jam/jalan dengan kenaikan jumlah masukan kendaraan 100 sampai 120 kendaraan/jam/jalan.
3) Masukan kendaraan menggunakan distribusi Poisson. 4) Penyeberang jalan tidak diperhitungkan pada simulasi ini.
5) Model simulasi berdasarkan waktu, dan simulasi dilakukan selama 3600 detik dengan lama cuplik (T) adalah satu detik.
6) Nilai minimal dari lampu hijau adalah 10 sampai 40 detik, dan nilai maksimal dari lama lampu hijau adalah 40 sampai 70 detik.
7) Waktu untuk berhenti dipertimbangkan masuk pada perhitungan waktu tunggu model simulasi ini.
8) Waktu yang hilang dari setiap fase adalah 3 detik, dan total waktu yang hilang dalam satu putaran signal (cycle) adalah 12 detik.
9) Lampu kuning pada lalu lintas dimasukkan pada lama lampu hijau pada setiap fasenya.
10) Kondisi jalan lalu lintas (ߚ) pada simulasi adalah 0.3 atau sangat saturasi.
11) Nilai keluaran kendaraan (݀௦.) berubah pada saat simulasi berjalan 1200 detik, dan kembali kepada kondisi semula saat simulasi sampai pada 3000 detik.
IV. HASIL PENILITIAN
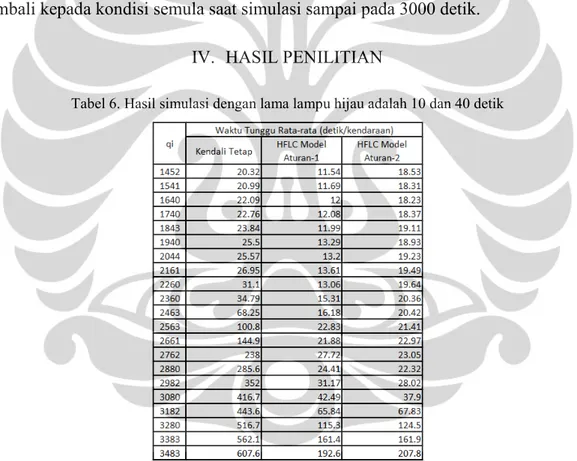
Tabel 6. Hasil simulasi dengan lama lampu hijau adalah 10 dan 40 detik
Dari hasil data yang didapat, terlihat kendalan dari model sistem HFLC dibandingkan dengan model sistem kendali tetap untuk menghadapi kondisi dinamis dari lalu lintas. Hasil simulasi dengan lama waktu lampu hijau 10 dan 40 detik seperti yang ditampilkan pada Tabel 6, terlihat bahwa model sistem kendali tetap waktu tunggu rata-rata kendaraan sudah melewati 50 detik saat jumlah masukan kendaraan 2463 kendaraan/jam/jalan. Sedangkan dengan
menggunakan model sistem HFLC baru melewati 50 detik waktu tunggu rata-rata kendaraannya saat masukan kendaraan 3182 kendaraan/jam/jalan.
Waktu tunggu rata-rata kendaraan pada saat jumlah masukan kendaraan kurang dari 2463 kendaraan/jam/jalan pun model sistem HFLC lebih andal dibandingkan dengan model sistem kendali tetap, yaitu waktu tunggu rata-rata kendaraan yang lebih kecil.
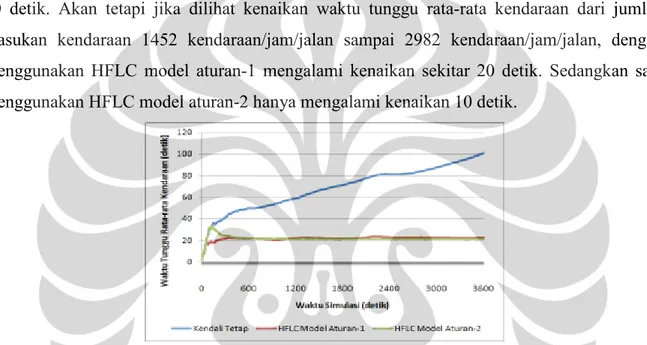
Model sistem HFLC model aturan-1 dibandingkan dengan HFLC model aturan-2, sampai dengan jumlah masukan kendaraan 2463 kendaraan/jam/jalan, masih lebih baik. Karena waktu tunggu rata-rata kendaraan dengan menggunkan HFLC model aturan-1 masih kurang dari 17 detik. Sedangkan dengan menggunakan HFLC model aturan-2 sudah mencapai 20 detik. Akan tetapi jika dilihat kenaikan waktu tunggu rata-rata kendaraan dari jumlah masukan kendaraan 1452 kendaraan/jam/jalan sampai 2982 kendaraan/jam/jalan, dengan menggunakan HFLC model aturan-1 mengalami kenaikan sekitar 20 detik. Sedangkan saat menggunakan HFLC model aturan-2 hanya mengalami kenaikan 10 detik.
Gambar 8. Grafik waktu tunggu rata-rata kendaraan hasil simulasi model sistem kendali tetap (biru), HFLC model aturan-1 (merah) dan model aturan-2 (hijau) dengan arah masukan jalan sama sebanyak 2563 kendaraan
Hasil simulasi model sistem kendali tetap, HFLC model aturan-1 dan model aturan-2, dilihat dari waktu tunggu rata-rata selama dimulasi 3600 detik dengan jumlah masukan kendaraan 2563 dan saat nilai keluaran kendaraan (݀௦.) berubah saat simulasi berjalan terlihat pada Gambar 8. Terlihat bahwa model sistem HFLC begitu baik dalam menangani waktu tunggu rata-rata kendaraan dibandingkan dengan sistem kendali tetap. Model sistem kendali tetap tidak dapat menangani jumlah masukan kendaraan yang masuk, sehingga waktu tunggu rata-rata kendaraan untuk bisa kelar pada perempatan tersebut terus meningkat. Pada Gambar 9 pun terlihat panjang antrian dari setiap jalan saat simulasi berjalan (dari paling atas ke bawah berturut-turut adalah dari arah W, N, E, dan S). Terlihat dengan jelas bagaimana model HFLC menangani panjang antrian dari setiap jalan yang ada.
Gambar 9. Grafik besar antrian hasil simulasi model sistem kendali tetap (biru), HFLC model aturan-1 (merah) dan model aturan-2 (hijau) dengan arah masukan jalan sama sebanyak 2563 kendaraan
Dilihat dari kenaikan lama lampu hijau dari setiap model, untuk model sistem HFLC, didapatkan bahwa seiring dengan naiknya lama lampu hijau maka waktu tunggu rata-rata kendaraan akan semakin bertambah. Sedangkan untuk model sistem kendali tetap, sampai saat masukan kendaraan 2360 kendaraan/jam/jalan waktu tunggu rata-rata kendaraan akan naik seiring dengan bertambahnya lama lampu hijau. Lebih dari itu, maka waktu tunggu rata-rata kendaraan akan mengalami penurunan seiring dengan bertambahnya lama waktu lampu hijau. Meskipun penurunan ini ada batas maksimumnya. Sampai titik tertentu, penurunan yang dialami oleh model sistem kendali tetap seiring dengan bertambahnya lama waktu lampu hijau akan mengalami titik balik dan terus bertambah seiring dengan naiknya lama waktu lampu hijau.
Sistem HFLC model aturan-1 dibandingkan dengan sistem HFLC model aturan-2, jika dilihat dari kenaikan lama waktu lampu hijau, yang lebih baik adalah sistem HFLC model aturan-2. Terlihat bahwa beda waktu tunggu rata-rata kendaraan saat lama waktu lampu hijau
naik, HFLC model aturan-2 mengalami kenaikan waktu tunggu rata-rata kendaraan yang lebih kecil dibandingkan dengan sistem HFLC model aturan-1.
Tabel 7. Hasil simulasi model sistem kendali tetap Tabel 8. Hasil simulasi HFLC model aturan-1
V. PEMBAHASAN
Dari hasil simulasi yang sudah dilakukan, terlihat jelas bahwa lalu lintas dengan menggunakan sistem HFLC lebih baik dibandingkan dengan model sistem kendali tetap. Disaat keluaran kendaraan lalu lintas dinamis, model sistem kendali tetap tidak dapat menangani jumlah masukan kendaraan yang ada. Karena model sistem kendali tetap, menetapkan lama lampu hijau dari setiap fase yang ada dengan data asumsi jumlah keluaran kendaraan yang ada. Jika keluaran kendaraan pada fase tersebut besar, maka lama lampu hijau akan diperbesar, jika sedikit lama lampu hijau pun akan sedikit. Jika mengalami perubahan jumlah keluaran kendaraan, maka model sistem kendali tetap tidak dapat menangani hal tersebut.
Berbeda dengan model sistem kendali tetap, model sistem HFLC lebih andal dalam menangani model lalu lintas yang dinamis. Karena lama lampu hijau ditentukan dari kondisi lalu lintas dari setiap fase yang ada. Sehingga, meskipun jumlah keluaran kendaraan dinamis atau berubah, model sistem HFLC masih andal untuk menangani hal tersebut. Karena yang dilihat pada model sistem HFLC adalah kondisi jalan pada setiap fasenya.
VI. KESIMPULAN
Dari simulasi yang sudah dilakukan, jelas terlihat bahwa sistem lalu lintas dengan menggunakan model sistem HFLC lebih baik dalam menangani waktu tunggu rata-rata kendaraan untuk bisa keluar dari perempatan terisolasi dibandingkan dengan model sistem kendali tetap. Terlihat bahwa model sistem kendali tetap sudah mulai tidak stabil waktu tunggu rata-rata kendaraannya saat jumlah masukan kendaraan 2463 kendaraan/jam/jalan. Sedangkan untuk model sistem HFLC masih cukup stabil waktu tunggu rata-rata kendaraannya sampai 3080 kendaraan/jam/jalan, lebih baik sekitar 600 kendaraan/jam/jalan dibandingkan dengan model sistem kendali tetap. Jika dilihat seiring dengan lama lampu hijau yang semakin diperbesar pun, model sistem HFLC tetap stabil dengan terus mengalami kenaikan hampir secara linear. Sedangkan modeil sistem kendali tetap mengalami kenaikan secara linear sampai dengan titik tertentu, dan kemudian mengalami penurunan seiring dengan kenaikan lama lampu hijau. Dari hasil simulasi ini terlihat jelas bahwa model sistem HFLC baik digunakan pada sistem lalu lintas dinamis dibandingkan model sistem kendali tetap.
VII. SARAN
Model sistem ini coba disimulasikan dengan data kondisi lalu lintas yang sesungguhnya, terutama untuk nilai keluaran kendaraan pada setiap fasenya. Agar terlihat keandalan model sistem HFLC dengan kondisi dinamis lalu lintas yang sesungguhnya. Coba juga dikembangkan model sistem ini dengan model jalan yang terintegrasi (bukan perempatan terisolasi), karena pada kondisi sesungguhnya sangat jarang terdapat sebuah perempatan yang terisolasi.
VIII. KEPUSTAKAAN
[1] Azimirad, E., Pariz, N., & Sistani, M. B. (2010). A Novel Fuzzy Model and Control of Single Intersection at Urban Traffic Network. IEEE , 107-111.
[2] Papageorgiou, M., Diakaki, C., Dinopoulou, V., Kotsialos, A., & Wang, Y. (2003). Review of Road Traffic Control Strategies. IEEE , 2043-2067.
[3] Yang, Z., Huang, X., Du, C., Tang, M., & Yang, F. (2008). Hierarchical Fuzzy Logic Traffic Controller for Urban Signalized Intersections. IEEE , 5203-5207.
[4] McNeil. 1968. A Solution to The Fixed-Cycle Traffic Light Problem for Compound Poisson Arrivals. Israel. Journal of Applied Probability. Vol. 5, No. 3 (Dec., 1968), pp. 624-635.
[5] Rouphail, Tarko, & Li. 2001. Traffic Flow at Signalized Intersection. Traffic Flow Theory Monograph, Chapter 9.
[6] Webster, F. V. (1958). Traffic Signal Settings. Road Research Laboratory Technical Paper No. 39, HMSO. London.