Manipulator Pergerakan Kaki Manusia Dengan Kontrol
Mikrokontroller
Edilla
1), Agus Wijianto
2), Adi Sucipto
3)1) Jurusan Teknik Elektro, Politeknik Caltex Riau, Pekanbaru 28265, email: [email protected] 2) Jurusan Teknik Elektro, Politeknik Caltex Riau, Pekanbaru 28265, email: [email protected]
3) Jurusan Teknik Elektro, Politeknik Caltex Riau, Pekanbaru 28265, email: [email protected]
Abstrak – Manipulator pergerakan kaki manusia dengan kontrol mikrokontroller adalah suatu alat yang menirukan pergerakan kaki manusia. Sensor yang digunakan pada Manipulator pergerakan kaki manusia ini adalah sensor flex. Sensor flex diletakan pada kaos kaki jari dan dikenakan pada kaki manusia, sehingga ketika sensor flex mendeteksi adanya gerakan pada jari dan sendi kaki menyebabkan perubahan tegangan dari sensor flex
yang kemudian dimanfaatkan sebagai input dari mikrokontroller. Mikrokontroller akan memproses data yang diperoleh dari sensor flex yang outputnya menggerakkan motor servo. Motor Servo yang digerakkan ada 8 buah 5 terpasang pada jari-jari dan 3 terpasang pada sendi kaki. Dengan mengunakan tali sebagai penghubung jari-jari kaki dan pegas sebagai pengembali posisi awal jari. Secara fungsi jari dapat bergerak sesuai perintah yang diberikan dengan persentase 100% dan untuk sendi kaki 94% dengan rata-rata waktu respon jari kaki sebesar 1,3 detik serta rata-rata waktu respon sendi kaki adalah sebesar 2,02 detik.
Kata Kunci : Kaki, Mikrokontroller, Motor Servo, Sensor Flex
Abstract - Manipulator of human foot with microcontroller as controller is a device that can mimics the
movement of the human foot. The sensor used in this device is the flex sensor. The flex sensor is placed on the
socks, so when the user moving then flex sensor will produce a resistance change and will further produce a voltage change. Next step, this voltage change will deliver to microcontroller as analog input. Microcontroller will proses this input to drive servo motors. Servo motors connected mechanically with fingers and joints of the feet. A spring is used to restore finger’s original position faster. From fingers function test result, this device perform 100% and for joint of feet function test its perform 94%. The average response time of the toes is 1,3 seconds and average response time for joint of foot is 2,02 second.
Keywords: Foot, Microcontroller, Servo motor, Flex sensor
1. PENDAHULUAN
Pada saat ini perkembangan robot semakin berkembang pesat. Perkembangan ini dapat dilihat dari teknologi industri – industri besar yang sudah menggunakan robot sebagai pekerja utamanya. Robot diciptakan karena dapat mengerjakan pekerjaan manusia yang memerlukan ketelitian dan ketepatan yang tinggi dan dapat melakukan pekerjaan yang berisiko tinggi (pekerjaan yang menyebabkan kematian), beberapa robot yang digunakan memiliki bentuk seperti bagian tubuh manusia salahnya satunya yang paling banyak digunakan adalah robot tangan
(leg robot). Proses kerja robot meliputi serangkaian
sistem kontrol yang memungkinkan robot dapat menerima perintah dan menjalankan program kerjanya dan menghasilkan proses yang baik yang dapat
diprogram secara berulang-ulang sesuai dengan kebutuhan, untuk itu penulis akan mencoba membuat kaki robot dengan model kaki manusia, kaki adalah titik terendah dari bagian tubuh manusia, kaki berfungsi sebagai penyimbang tubuh saat manusia berdiri, sehingga kaki merupakan bagian yang sangat penting, tanpa adanya kaki manusia tentunya akan kesulitan melakukan aktivitasnya. Pada saat ini banyak penderita cacat kaki hanya menggunakan alat bantu seperti kaki palsu dan kayu penyanga untuk dapat berjalan kembali, kebanyakan dari penderita cacat kaki mengalami kesulitan untuk berjalan menggunakan kaki palsu karena harus beradapatasi dengan kaki palsu yang cukup lama. Pada Gambar 1.1 merupakan gambar dari struktur tulang kaki manusia. Pada penelitian ini nantinya akan dibuat sebuah kaki robot yang menyerupai kaki manusia.
Gambar 1.1. Struktur tulang kaki manusia Manipulator kaki ini nantinya dikontrol menggunakan mikrokontroller ATMega 8535 dengan sensor flek sebagai input dan sebagai aktuatornya adalah motor servo, sehingga pergerakan dari robot ini diharapkan mampu menyerupai pergerakan dari kaki manusia. Sistem robotika ini dikembangkan agar dapat membantu manusia menciptakan sebuah inovasi dari kaki palsu yang akan berguna untuk penderita cacat kaki dengan kontrol yang canggih sehingga penderita cacat kaki dapat berjalan kembali dengan normal dalam waktu yang singkat.
2. LANDASAN TEORI 2.1. Penelitian Terdahulu
Rian Rivandi, mahasiswa Teknik Mekatronika Politeknik Caltex Riau, pada tugas akhirnya yang berjudul Manipulator Robot Tangan Dengan Flex Sensor berhasil merancang bentuk robot tangan yang dapat bergerak mengikuti setiap pergerakan jari manusia. Jenis sensor yang digunakan adalah sensor flex. Pada setiap derajat kebebasan robot dihubungkan dengan tali, dan pada setiap jari menggunakan motor servo. Masing-masing motor servo memiliki torsi 9kg.cm [1]. Pada penelitian lain yang berjudul Robot Tangan, robot tersebut berhasil mengangkat benda dengan berat 300g, dengan tingkat keberhasilan 70% dan waktu yang dibutuhkan untuk menempuh waktu 1 pemindahan dari posisi benda awal dengan memutar base 90 derajat dengan rata – rata waktu 11.34 detik [2].
Gambar 2.1. Robot tangan
Pada penelitian ini akan dibuat sebuah manipulator dari robot kaki, dimana sistem mekanisme dari manipulator kaki akan menggunakan spring atau per pada setiap sambungan pada jari – jari kaki dan menggunakan bahan kayu agar pada pembuatannya mirip dengan model kaki manusia, sehingga bentuk dari manipulator ini lebih mirip kaki manusia dari pada menggunakan bahan kayu. 2.2. Kaki
Kaki adalah titik terendah dari kaki manusia. Bentuk kaki, bersama dengan sistem keseimbangan-menjaga alami tubuh, membuat manusia mampu tidak hanya berjalan, tetapi juga memanjat, dan banyak kegiatan lainnya. Kaki manusia merupakan bagian yang luar biasa kompleks dalam tubuh. Menyerap dan mendistribusikan tekanan dengan setiap langkah yang diambil. Cidera ringan pada kaki dapat mempengaruhi keseimbangan seseorang, postur, dan keselarasan tulang belakang. Kaki dibutuhkan setiap harinya untuk dapat berjalan tegap, anatomi kaki terdiri dari 26 tulang, 33 sendi, dan ratusan tendon, ligamen, dan otot-otot yang saling berhubungan [3].
2.3. Mikrokontroller Atmega 8535
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya mikrokontroller sangat banyak digunakan terutama dalam pengendalian robot. Pada penelitian ini akan digunakan mikrokontroller Atmega 8535 sebagai kontroller robot manipulator kaki [4].
2.4. Sensor Flex
Flex sensor adalah Sensor dua terminal dimana
tahanan dari sensor akan berubah berdasarkan lengkungan yang terjadi pada sensor tersebut. Bentuk fisik flex sensor dapat dilihat pada Gambar
2.3. Flex sensor jarang digunakan untuk
Mengendalikan daya tinggi (lebih dari 1 Watt) secara langsung. Flex sensor digunakan untuk mengatur taraf isyarat analog, dan sebagai pengendali masukan untuk sirkuit elektronik. Flex sensor yang di gunakan pada penelitian ini adalah flex sensor dengan panjang 2,2” dengan range hambatan 45 KOhm-125 Kohm [5].
Gambar 2.1. Sensor flex 2.5. Motor Servo
Motor servo adalah sebuah motor dengan sistem umpan balik tertutup yang artinya posisi motor servo akan di informasikan kembali dalam rangkaian kontrol
yang ada pada rangkaian motor servo [6]. Motor servo terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi sebagai batas sudut putaran motor servo [7].
Gambar 2.2. Motor servo 3. HASIL DAN PEMBAHASAN 3.1 Perancangan dan hasil
Perancangan manipulator kaki ini dimulai dengan perancangan diagram blok, flowchart dan desain alat. Sedangkan untuk pengujian pada alat dilakukan pada pengujian perubahan nilai sensor, pengujian fungsi manipulator kaki serta kecepatan respon manipulator. Blok diagram dan flowchart sistem dapat dilihat pada gambar 3.1 dan gambar 3.2 sedangkan untuk perancangan desain mekanik manipulator kaki ini dapat dilihat pada gambar 3.3. setelah melewati proses perancangan dan pembuatan maka hasil manipulator kaki ini dapat dilihat pada gambar 3.4 dan gambar 3.5.
Gambar 3.1 Blok diagram manipulator kaki
Gambar 3.2 Flowchart sistem
Gambar 3.3 Perancangan mekanik manipulator kaki
Gambar 3.4 Hasil implementasi perancangan
Gambar 3.5 Detail telapak dan jari kaki
Manipulator kaki ini dibuat dengan bahan kayu jabon. Spesifikasi motor servo yang digunakan untuk pergerakan sendi adalah motor servo dengan torsi 3Kg.cm (kebutuhan berdasarkan perhitungan adalah 2,89 Kg.cm) sedangkan untuk penggerak jari diguna- kan motor servo dengan torsi 1Kg.cm (kebutuhan berdasarkan perhitungan 0,78Kg.cm). Pada per-gerakan jari kaki menggunakan tali sebagai penghubung ke motor servo, jika motor servo bergerak 90° tali tertarik dan jari kaki akan bergerak, untuk mengembalikan posisi semula menggunakan pegas sehingga jika motor servo kembali ke posisi 0° pegas akan menarik kembali jari pada posisi semula. 3.2 Pengujian sensor dan respon manipulator Pengujian pertama adalah perubahan resistansi dan tegangan terhadap kelengkungan sensor flex. Pengu-jian ini dilakukan melakukan pengukuran hambatan dan tegangan pada 4 titik dari sensor flex , mulai dari 25% ( 20mm), 50% (40mm), 75% (60mm), 100% (80mm) pada perlakukan sudut tertentu.
Dari hasil pengujian diketahui pada Tabel 3.1,Tabel 3,2, Tabel 3.3, dan Tabel 3.4 perubahan resistansi dan tegangan akan semakin besar jika sudut lengkungan pada sensor flex semakin besar. Pada rangkaian sensor digunakan resistor 100 KΩ sebagai tahanan pembanding maka secara teori nilai tegangan keluaran (Vout) dari sensor flex adalah mengikuti persamaan (1).
𝑉𝑜𝑢𝑡 = 𝑉𝑖𝑛( 𝑅 𝑆𝑒𝑛𝑠𝑜𝑟
𝑅 𝑃𝑒𝑚𝑏𝑎𝑛𝑑𝑖𝑛𝑔+𝑅 𝑆𝑒𝑛𝑠𝑜𝑟)
(1)
Tabel 3.1 Perubahan hambatan dan tegangan pada titik tekuk 25%
Tabel 3.2 Perubahan hambatan dan tegangan pada titik tekuk 50%
Tabel 3.3 Perubahan hambatan dan tegangan pada titik tekuk 75%
Tabel 3.3 Perubahan hambatan dan tegangan pada titik tekuk 75%
Dari data nilai tegangan output rata-rata dapat dilihat bahwa output maksimum (4,14 V) diperoleh pada titik tekuk 50% dengan sudut lengkungan 180° dan output minimum (3,16 V) diperoleh pada pengukuran titik tekuk 75% dengan sudut 0° maka dengan menggunakan persamaan (1) dapat diperoleh :
Vout Max = 6V(69,94 KΩ /100KΩ+69,94 KΩ) = 2.47 v
Vout Min = 6V(38,46 KΩ /100KΩ+38,46KΩ) = 1.66 V
Pengujian berikutnya adalah pengujian fungsi dan waktu respon antara jari dan sendi kaki dengan input sudut yang diberikan pada sensor flex. Percobaan dilakukan sebanyak 10 kali dan waktu waktu yang dihitung adalah setiap 1 kali dari pergerakan jari atau sendi kembali pada posisi semula.
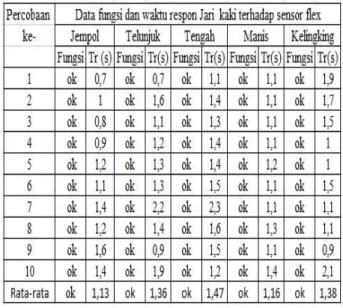
Tabel 3.5 Fungsi dan waktu respon jari kaki
Pada Tabel 3.5 dapat dilihat fungsi dan waktu respon jari kaki secara fungsi jari kaki mulai dari jempol sampai kelingking sudah berfungsi dengan baik, dengan waktu respon tercepat 1,13 detik oleh jari jompol dan terlama jari 1,47 detik oleh jari tengah dari 10 kali percobaan, salah satu hal yang mempengaruhi waktu respon adalah terjadinya gesekan antara jari sehingga memperlambat gerak jari untuk kembali pada posisi semula.
Tabel 3.6 Fungsi dan waktu respon sendi kaki dengan beban
Pada data Tabel 3.6 adalah data dari fungsi dan waktu respon sendi kaki dengan beban telapak kaki dan sendi lutut, dapat dilihat dari 10 kali percobaan berdasarkan fungsi pada pergerakan sendi vertikal dengan tingkat persentase keberhasilan 70%, pada percobaan keenam, delapan dan kesepuluh tidak berhasil hal ini dikarenakan servo mengalami beban berlebih sehingga sering terjadi servo tidak sanggup untuk mengangkat sendi vertikal atas hal ini diperjelas pada data tabel 3.7 sendi vertikal atas apabila tanpa adanya beban secara fungsi berjalan baik.
Tabel 3.7 Fungsi dan waktu respon sendi kaki tanpa beban
Pada Tabel 3.7 adalah data pengujian fungsi dan waktu respon dari sendi kaki tanpa beban atau
tanpa telapak kaki sebagai beban, terlihat secara fungsi berjalan dengan baik, untuk waktu respon
lebih cepat karena servo berjalan tanpa adanya beban, pada waktu respon sendi vertikal atas adalah waktu rata-rata tercepat yaitu 1,375 detik, jika dibandingkan dengan respon menggunakan beban yaitu 3,38 detik maka selisih nya adalah 2,002 detik, sehingga dari keseluruhan pergerakan sendi dapat diketahui bahwa beban terbesar berada pada sendi vetikal atas.
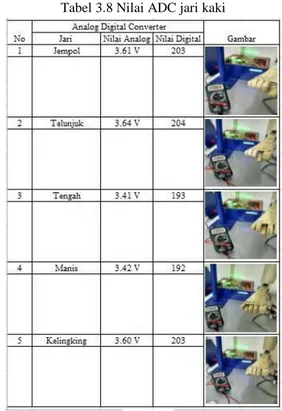
Pengujian berikutnya adalah pengujian terhadap nilai ADC (analog digital converter) motor servo.
Tabel 3.8 Nilai ADC jari kaki
Tegangan refferensi yang digunakan pada ADC adalah sebesar 5 Volt. Dengan menggunakan rumus dasar nilai ADC maka dapat diketahui nilai persen error dari nilai ADC tersebut.
𝐴𝐷𝐶 = 𝑉𝑖𝑛 ( 𝑉 𝑟𝑒𝑓𝑓𝑉𝑖𝑛 ) 𝑥255 (2)
𝐸𝑟𝑟𝑜𝑟 = ( 𝑃𝑒𝑚𝑏𝑎𝑐𝑎𝑎𝑛 𝐴𝐷𝐶−𝑁𝑖𝑙𝑎𝑖 𝑇𝑒𝑜𝑟𝑖𝑁𝑖𝑙𝑎𝑖 𝑇𝑒𝑜𝑟𝑖 ) 𝑥100% (3)
Dari persamaan (3) dapat diketahui bahwa error nilai ADC untuk masing-masing pergerakan adalah sebagai berikut :
Tabel 3.10 Nilai error ADC jari kaki
No. Bagian Nilai Error
[%] 1 Jari jempol 10,3 2 Jari telunjuk 9,89 3 Jari tengah 10,97 4 Jari manis 10,07 5 Jari kelingking 10,56 Rata-rata error 10,36
Dari data tabel 3.10 tersebut diketahui bahwa rata-rata error ADC jari kaki adalah 10,36%, angka ini
menunjukkan sebesar itu juga ketidakakuratan pergerakan jari kaki manipulator dalam mengikuti pergerakan data aktual jari kaki penggunanya.
4. KESIMPULAN
Adapun kesimpulan yang dapat ditarik dari penelitian ini adalah :
1. Pada jenis sensor flex yang digunakan diperoleh karakteristik output maksimum diperoleh pada titik tekuk 50% dengan sudut lengkungan 180° dan output minimum diperoleh pada pengukuran titik tekuk 75% dengan sudut 0°
2. Unjuk kerja manipulator pada bagian jari kaki memberikan kinerja yang baik dengan tingkat keberhasilan fungsi jari 100% dan respon waktu rata-rata untuk respon jari kaki adalah 1,3 detik. 3. Salah satu faktor yang mempengaruhi waktu
respon jari kaki adalah adanya gesekan antar jari. 4. Untuk pergerakan fungsi sendi kaki rata-rata
tingkat keberhasilannya 94% dengan rata-rata respon waktu pergerakan 2,02 detik
Adapun beberapa saran perbaikan pengem-bangan kedepan terkait penelitian manipulator kaki ini adalah menggunakan material yang lebih kuat dan ringan sehingga beban yang ditanggung motor lebih kecil dan memperhalus permukaan antar jari sehingga dapat mengurangi efek gesekan antar jari sehingga dapat meningkatkan waktu respon.
DAFTAR REFERENSI
[1] Rian Rivandi, "Manipulator Robot Tangan dengan Flex Sensor".Proyek Akhir Mekatronika Politeknik Caltex Riau 2014 [2] Daud, "Robot Tangan", Proyek Akhir Elektronika Politeknik Caltex Riau 2013
[3] Prijo Sudibjo. (2015). "Anatomi Tubuh Manusia". Hal 105. Diakses 11 Maret 2016 dari http://staff.uny.ac.id /sites/default/files/ANATOMI%20MANUSIA%20(ILMU%20URA I).pdf.
[4] Whardana, L, "Belajar Sendiri mikrokontroler AVR Seri ATMega8535". Penerbit Andi: Yokyakarta, 2006
[5] Spectra Symbol, Data Sheet Sensor Flex, hal 1. Diakses 15 Juli 2015 dari https://www. sparkfun. com/datasheets/Sensors/ Flex/flex22.pdf
[6] Syahrul. "Pemograman Mikrokontoller AVR", Informatika Bandung, 2014
[7] Tianur, "Diktat Praktikum Mikrokontroller AVR", Politeknik Caltex Riau, 2013