Abstract – In general, all movements can be grouped into 2, namely upper limb and lower limb movements. All movements, including walking, is a complicated process which involves human’s brain, spinal cord, peripheral nerves, muscles, bones and joints. Paralyzed lower limbs is a patient’s clinical condition in which he suffers from the paralysis on the lower parts of the body. FES (Functional Electrical Stimulator) is one of the method that can be used as the restoration theraphy for the patient’s suffering from paralyzed lower limbs. It is aimed to activate the motor nerve, so that the patients can walk. The expectation from this research is the design of FES system using data communications. Wireless FES which uses X-Bee Pro is expected to be helpful in making the restoration process of the patients suffer from lower paralysis easier and faster.
Key Words — Peripheral nerve, paralyzed lower limbs, Functional Electrical Stimulator, restoration.
Abstrak–- Secara garis besar semua jenis gerakan itu
dapat dikelompokkan menjadi dua bagian besar, yaitu gerakan tubuh bagian atas (upper limb) dan bawah (lower limb). Semua jenis gerakan, termasuk berjalan, merupakan hasil dari sebuah proses rumit yang melibatkan otak, sumsum tulang belakang, saraf perifer, otot, tulang dan sendi. Paralyzed lower limbs adalah suatu kondisi klinis pada pasien yang berupa kelumpuhan anggota tubuh bagian bawah. FES (Functional Electrical Stimulator) adalah merupakan salah satu divais yang dipergunakan sebagai metode terapi restorasi gerakan pasien dengan paralyzed lower limbs untuk mengaktifkan jaringan motoriknya, sehingga pasien dapat berjalan. Harapan utama dari penelitian ini adalah adanya disain sistem FES dengan komunikasi data tanpa kabel. Dengan Wireless FES yang menggunakan X-Bee Pro, diharapkan dapat semakin memudahkan dan mempercepat proses restorasi kelumpuhan pasien bagian bawah.
Kata Kunci— Saraf perifer, paralyzed lower limbs, Functional Electrical Stimulator, restorasi.
I. PENDAHULUAN
unctional electrical stimulator (FES) telah banyak diteliti untuk digunakan dalam merestorasi kemampuan motorik pada pasien yang mengalami kerusakan pada susunan syaraf pusat yang diakibatkan oleh spinal cord injury (SCI) maupun stroke. Penelitian mengenai FES pada level klinis mencakup restorasi
kemampuan gerak dari alat-alat gerak manusia bagian atas (upper limb) maupun bawah (lower limb) dalam kehidupan sehari-hari, seperti menggenggam (grasping) [1], [2], berdiri (standing) dan berjalan (gait) [2], [3]. Di Indonesia, banyak penderita kelumpuhan yang mengalami kehilangan kemampuan berjalan yang diakibatkan oleh gangguan sistem syaraf motorik akibat
spinal cord injury atau kerusakan pada otak (brain damage). Oleh karena itu FES sangat potensial untuk dikembangkan di Indonesia sebagai salah satu metode rehabiltasi sistem motorik.
Aplikasi FES untuk restorasi kemampuan berjalan pada level klinis pada umumnya menggunakan sistem yang ditrigger secara manual dengan menerapkan kendali open-loop. Sistem ini banyak diapakai karena sederhana dan mudah diaplikasikan. Pada dasarnya, sebuah open-loop FES tidak memanfaatkan muscle model untuk memprediksi pola dari intensitas stimulasi listrik. FES sistem dengan kendali open-loop dapat menghasilkan gerakan yang baik hanya dalam kondisi
musculo-skeletal system yang dikontrol tidak mengalami gangguan. Gerakan organ tubuh manusia yang diaktifkan oleh FES membutuhkan suatu metode pengendalian yang handal sehingga dapat menghasilkan gerakan yang diinginkan. Akan tetapi mengendalikan gerakan organ tubuh manusia yang diaktifkan oleh FES adalah sulit dan sangat kompleks dikarenakan nonlinearitas dari respon neuro-muscular system, variasi dari respon musculo- skeletal system terhadap stimulasi listrik, time delay yang panjang, dan gejala kelelahan (muscle fatigue). Oleh karena itu, untuk mengatasi kesulitan- kesulitan dalam pengendali FES maka digunakan closed-loop control untuk menghasilkan gerakan yang akurat.
Pengembangan FES system dalam penelitian ini dalam rangka menjawab permasalahan kurangnya sarana rehabilitasi motorik dan merupakan tindak lanjut dalam memasyrakatkan FES ke level klinis dengan cara menggunakan closed-loop control. Sistem typical closed-loop FES terdiri dari kontroler, stimulator dan sistem sensor, seperti pada Gambar 1. Sistem yang akan dikembangkan dalam penelitian ini meliputi beberapa subsistem yang digambarkan dalam Gambar 2.
Disain Wireless Functional Electrical Stimulator
menggunakan X-Bee Pro
Bambang Supeno*, Rachmad Setiawan, Achmad Arifin
Bidang Keahlian Teknik Elektronika, Program Pascasarjana Teknik Elektro
Institut Teknologi Sepuluh Nopember Surabaya
*
[email protected]
error Musculo-skeletal System Controller target Stimulator Sensor
Gambar 1. Diagram sebuah closed-loop FES system
Closed-loop FES System
Sensor System
Control Method Stimulator & Controller
Gambar 2. Sistem yang akan dikembangkan
Permasalahan yang diangkat dalam penelitian ini adalah perancangan dan implementasi subsistem pendukung dari closed-loop FES system yang meliputi: - Perancangan dan implementasi metode kendali FES. - Perancangan dan implementasi portable sensor
system dengan menggunakan fusi sensor-sensor mekanik dengan ukuran miniatur, yakni gyroscope
dan accelerometer.
- Perancangan dan implementasi portable electrical stimulator dan rangkaian pengendali berbasis mikrokontroler ATMega8.
II. TINJAUAN PUSTAKA
Hilangnya sinyal perintah motorik dari otak menuju otot pada pasien lumpuh dapat diatasi dengan menggantikan sinyal perintah tersebut dengan sinyal stimulasi elektrik buatan (artificial electrical stimulation) yang diaplikasikan pada susunan syaraf tepi (peripheral nervous system) atau otot. Stimulasi elektrik buatan ini bekerja dengan cara yang sama dengan sinyal perintah motorik dari otak, menghasilkan kontraksi otot untuk menghasilkan gaya otot yang dibutuhkan untuk gerakan. Metoda ini disebut dengan functional electrical stimulation, selanjutnya disebut FES, dengan tujuan untuk menghasilkan kontraksi muskular dan mengembalikan fungsional gerakan [1]. Secara klinis FES digunakan sebagai ortosis yang menghasilkan efek terapi terhadap kelumpuhan yang diderita pasien. FES dapat menghasilkan indirect control terhadap kontraksi otot dan gerakan, dan berkontribusi untuk normalisasi sistem neural yang mengalami kerusakan [2]. Kontribusi FES dalam normalisasi sistem neural tersebut disebabkan motorik respon yang terprogram dan berulang terhadap sinyal stimulasi elektrik yang diterapkan secara terprogram dan berulang dalam jangka yang panjang. Riset klinis dasar mengenai restorasi gerakan dengan FES melibatkan beberapa tipe gerakan fungsional dalam kehidupan sehari-hari, seperti menggenggam (grasping)[3],[4], berdiri dan berjalan (standing and gait) [1], [4].
Gerakan manusia yang diimbas oleh FES membutuhkan metoda kendali yang cocok sehingga dapat merestorasi kemampuan gerak seperti yang diinginkan. Akan tetapi mengendalikan gerakan anggota
Gambar 3.Diagram konseptual control cycle-to-cycle [24]
badan dengan FES adalah tugas yang sulit dan kompleks, dikarenakan oleh nonlinearitas dari sistem
neuro-musculo-skeletal [5]-[7], varibalitas respon otot [8], waktu jeda dan kelelahan otot [6],[9]. Oleh karena faktor inter-subject variability, maka parameter FES yang tepat untuk seorang pasien hanya cocok untuk dirinya sendiri dan dapat diperoleh melalui identifikasi melalui langkah eksperimen. Penelitian mengenai aplikasi metoda kendali FES untuk restorasi gerakan meliputi metoda kendali open-loop control [1], [4], [10]-[14], dan closed-loop control [15]-[19]. Walaupun
closed-loop control telah dan sedang diteliti, namun aplikasi FES pada level klinis pada umumnya menggunakan sistem sederhana dan dikendalikan
open-loop control. Hal ini dikarenakan closed-loop FES system yang sedang diteliti masih belum memenuhi keseluruhan kriteria kehandalan dan integrasi dalam aplikasi klinis. Sistem dengan open-loop control banyak dipakai karena sederhana dan mudah diaplikasikan. Secara konseptual, diagram control cycle-to-cycle
diperlihatkan pada Gambar 3. Dengan FES gait pattern
yang sudah ada dan dikontrol dengan metode
cycle-to-cycle tersebut, diharapkan penderita paralyzed
dapat bergerak sesuai dengan gerakan individu normal. Aturan burst duration stimulasi TB[n] pada cycle saat ini yang dihasilkan:
TB[n] = TB[n-1] + ∆TB[n]
Dimana TB[n-1] adalah besar burst duration pada cycle sebelumnya, ∆TB[n] adalah nilai yang dihasilkan oleh kontroler.
Pencarian metode kendali untuk FES gait yang efektif melibatkan dua metoda kendali yakni
trajectory-based control dan cycle-to-cycle control.
Trajectory-based control, walau dapat dibuktikan stabil oleh Kubo dkk [15], namun itu terbatas untuk pengendalian single-joint (knee joint control). Pada pengujian dengan two-joint movements (knee and ankle joints), tidak bisa mengkompensasi pengaruh gerakan satu joint terhadap joint yang lain. Hasil pengujian pada penelitian Hatwell dkk [16] menunjukkan bahwa
feasibility dari trajectory-based control masih belum jelas, dalam beberapa kasus mengalami osilasi, walaupun metode ini diwujudkan dengan adaptive controller.
Boost Converter atau step up converter adalah dc to dc converter yang berfungsi menaikkan level tegangan dc menjadi level tegangan dc yang lebih tinggi. Prinsip kerja dari rangkaian ini adalah, ketika
Gambar 4. Rangkaian dasar boost converter
saklar S tertutup, sebagaimana terlihat pada Gambar 4 di atas, arus akan mengalir melewati induktor L dan energi akan tersimpan di induktor L. Pada saat saklar S terbuka, arus akan mengalir melewati diode D menuju kapasitor C sehingga kapasitor tersisi sebesar Vs. Induktor L berfungsi sebagai pompa yang menerima energi pada saat saklar S tertutup dan mengalirkan energi ke kapasitor C ketika saklar S terbuka. Ketika saklar S kembali tertutup maka akan terjadi penyimpanan energi pada induktor L dan energi ini akan dialirkan ke kapasitor C saat saklar S terbuka, sehingga tegangan kapasitor menjadi 2 Vs. Kenaikan tegangan pada kapasitor C akan terus bertambah dengan pemberian energi yang dialirkan dari induktor.
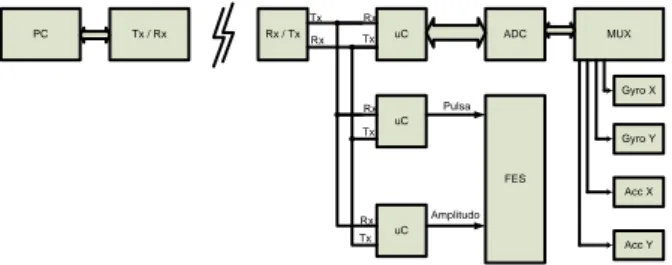
III. PERANCANGANALAT WIRELESS-FES Berikut adalah diagram blok dari sistem Wireless
FES, terlihat pada Gambar 5, yang terbagi dalam dua bagian utama. Bagian pertama adalah yang terhubung dengan PC (personal computer), sedangkan bagian ke dua terhubung ke kaki pasien dengan lower limb paralyzed. Kontrol utama atau start awal terletak pada PC, sehingga selama tombol start belum diaktifkan, walau sistem FES sudah standby, tidak terjadi proses pengiriman dan penerimaan data.
Proses penerimaan dan pengiriman data terjadi dengan menggunakan protokol untuk setiap mikrokontroler yang menangani pengambilan data sensor dan pengiriman perintah ke mikrokontroler yang menangani kontrol FES. Adapun protokol yang digunakan adalah sebagai berikut:
Pada saat komputer mengirimkan data serial dengan huruf ’a’, maka mikrokontroler slave akan mengambil data dari gyro untuk sumbu x dan mengirimkannya ke komputer dengan data biner.
Pada saat komputer mengirimkan data serial dengan huruf ’b’, maka mikrokontroler slave akan mengambil data dari gyro untuk sumbu y dan mengirimkannya ke komputer dengan data biner.
Pada saat komputer mengirimkan data serial dengan huruf ’c’, maka mikrokontroler slave akan mengambil data dari accelerometer untuk sumbu x dan mengirimkannya ke komputer dengan data biner. Pada saat komputer mengirimkan data serial dengan
huruf ’d’, maka mikrokontroler slave akan mengambil data dari accelerometer untuk sumbu y dan mengirimkannya ke komputer dengan data biner. Pada saat komputer mengirimkan data serial dengan
huruf ’e’ dan diikuti oleh data, maka komputer memerintahkan mikrokontroler slave yang menangani lebar pulsa FES untuk mengeluarkan pulsa-pulsa FES dengan lebar seperti yang diperintahkan komputer.
PC Tx / Rx Rx / Tx uC uC uC ADC MUX FES Gyro X Gyro Y Acc X Acc Y Rx Tx Rx Tx Rx Tx Rx Tx Pulsa Amplitudo
Gambar 5. Diagram Blok Sistem Wireless FES
Pada saat komputer mengirimkan data serial dengan huruf ’f’ dan diikuti oleh data, maka komputer memerintahkan mikrokontroler slave yang menangani amplitudo FES untuk mengeluarkan tegangan FES sesuai dengan yang diperintahkan komputer.
IV. HASIL DISAINDAN PENGUJIANALAT
Selanjutnya, berdasarkan diagram blok disain pada Gambar 5, dibuat rangkaian wireless FES dengan menggunakan komponen utama IC X-Bee Pro sebagai tranciever data. Bagian pertama adalah mewujudkan rangkaian interface yang akan menghubungkan PC dengan bagian transceiver X-Bee Pro, sebagaimana terlihat pada Gambar 6 dan 7. IC TC232CPE merupakan perangkat yang memiliki dual transceiver RS-232, yang sesuai dengan pedoman EIA/TIA RS232E serta ideal untuk semua jenis link komunikasi yang menggunakan RS232. Perangkat ini beroperasi dengan catu daya 5V dan berisi dua konverter tegangan yang menghasilkan pasokan listrik ± 10V. TC232CPE ini memiliki empat tingkat translator/konverter. Dua diantaranya adalah pemancar RS-232 yang mengkonversi tingkat masukan TTL/CMOS ke tingkat keluaran RS-232. Dua konverter lainnya adalah penerima RS-232 yang mengkonversi masukan RS-232 untuk tingkat keluaran 5V pada TTL/CMOS. Penerima memiliki ambang batas nominal 1.3V, histeresis tipikal 0.5V, dan dapat beroperasi dengan range tegangan input sampai ± 30V. Foto dari alat Interface to RS 232 diperlihatkan pada Gambar 8.
Gambar 6. Interface RS232 dan Tx-Rx X-Bee Pro (master)
Gambar 8. Foto Rangkaian Interface RS232 dan Tx-Rx X-Bee Pro (master)
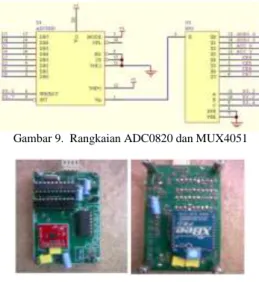
Gambar 9. Rangkaian ADC0820 dan MUX4051
Gambar 10. Foto Rangkaian Rx-Tx X-Bee Pro (slave) dan ADC0820/MUX4051
Tabel 1. Logika sekuensial pada multiplekser 4051
RF Module merupakan sebuah wireless embedded
modul yang dapat dengan mudah di-interface-kan dengan berbagai macam mikrokontroler. Radio
frequency tranciever ini merupakan sebuah modul yang terdiri dari RF receiver dan RF transmitter dengan sistem interface serial UART asynchronous. Langkah pertama yang harus dilakukan dalam menggunakan RF Module agar dapat melakukan komunikasi point to point
adalah melakukan setting konfigurasi alamat (address). Proses konfigurasi ini dapat dilakukan melalui software X-CTU yang merupakan software aplikasi khusus untuk
RF Module. Cara lain untuk melakukan setting dapat dilakukan melalui hyperterminal. Untuk melakukan
setting konfigurasi address melalui hyperterminal ada dua metode. Metode pertama disebut one line percommand dan metode kedua disebut multiple command on one line.
ADC0820 mempunyai data 8-bit, berkecepatan tinggi dan catu daya tunggal. Adapun fitur & spesifikasi teknis ADC0820 adalah sebagai berikut. Tegangan kerja (VCC) = Tegangan referensi (Vref) = +5VDC. Fungsi
track-and-hold yang terintegrasi. Tidak memerlukan
clock eksternal. Memiliki tiga operasi: RD (Read)
Mode,WR-RD (Write-Read) Mode, WR-RD Stand Alone Operation. Waktu Konversi 2,5 ms pada Read
Mode dan 1,5 ms pada Write-Read Mode dan WR-RD
Stand Alone Operation. Range input 0 VDC hingga +5 V
(dengan VCC = +5 VDC). Selisih hasil pengukuran dan
penghitungan maksimum 1 LSB (sekitar 20 mV dengan menggunakan VCC = +5 VDC). Tidak membutuhkan
pengaturan zero atau full-scale adjust. Antarmuka paralel dengan level tegangan CMOS atau TTL.
Multiplekser analog 4051 adalah suatu sistem penyaluran data (analog) dari sejumlah n kanal ke satu kanal keluaran. Pemilihan salah satu kanal untuk dihubungkan ke saluran ditentukan oleh kode biner yang spesifik, yang ditunjukkan pada Tabel 1. Misalnya, saat kode biner menunjukkan atau mempunyai kombinasi 001 maka berarti sinyal yang dihubungkan ke saluran keluaran adalah sinyal informasi yang kedua yaitu dalam pencacah biner 3 bit. Dalam hal ini pin 14 (GYRO Y). Bagian multiplekser ini menerima beberapa masukan, yaitu pin 13 dan 14 menerima masukan dari gyrometer (GYRO X dan Y) sedangkan pin 12 dan 15 menerima masukan dari accelerator (ACC X dan Y). Baik gyro mau acc, keduanya tertempel pada bagian otot kaki pasien. Rangkaian ADC0820 dan MUX4051 diperlihatkan pada Gambar 9, dan foto alat diperlihatkan pada Gambar 10.
Berikutnya adalah rangkaian pembangkit stimulator/FES. Bagian ini adalah merupakan rangkaian inti dari Functional Electrical Stimulator (FES), yang mampu menghasilkan sinyal keluaran dalam bentuk pulsa. Sebagai pulse generator, digunakan sebuah mikrokontroler 892051, khususnya pada pin 11 (P3.7). Skema rangkaian pembangkit pulsa FES ditunjukkan pada Gambar 11 dan pembangkit amplitudo FES pada Gambar 12 di bawah ini. Foto dari alat FES diperilhatkan pada Gambar 13.
Gambar 11. Rangkaian Pembangkit Pulsa FES
Gambar 12. Rangkaian Pembangkit Amplitudo FES
Gambar 13. Foto rangkaian pembangkit pulsa dan amplitudo FES
Keluaran pin 11 dari mikrokontroler langsung dipisah menjadi 2 jalur, salah satunya disalurkan melalui
sebuah transistor penguat npn tipe BD139 (Q4).
Sedangkan yang lain, lebih dahulu dibalik oleh inverter CMOS 4069 (U4A) sebelum akhirnya dilewatkan ke
penguat npn BD139 juga (Q3). Bedanya, pada bagian
kedua ini keluaran kolektor Q3 dibalik lagi
menggunakan penguat pnp dari 2SA1265 (P2).
Akibatnya, bagian ini dikombinasikan dengan Q4 dan
P2, sehingga mengasilkan pulsa keluaran yang lebih
besar, dan difungsikan sebagai sebuah boost converter. Sebagai alat pendeteksi gerakan lower limb, dipergunakan sensor gyro-accelerometer ADXL335, diperlihatkan pada Gambar 14. Sensor ini mempunyai bentuk kecil 4 mm x 4 mm x 1.45 mm, tipis, konsumsi daya rendah, 3 aksis dengan output yang sudah melewati pengkondisi sinyal. Sensor ini mengukur akselerasi dengan range full scale minimum 3g. Sensor ini juga dapat mengukur akselerasi statis dari gravitasi dalam aplikasi tilt sensing sama baiknya dalam pengukuran akselerasi dinamis dari motion, shock atau vibration. Foto rangkaian sensor diperlhatkan pada Gambar 15.
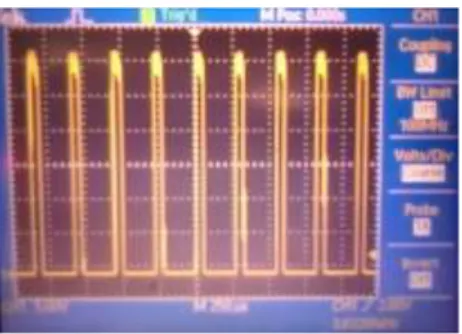
Sebelum Wireless-FES diaplikasikan secara eksperimen kepada pasien, maka terlebih dahulu perangkat tersebut harus diuji-coba. Tahap awal adalah dilakukan beberapa pengukuran rangkaian. Hasil Pengukuran FES dengan menggunakan osiloskop digital TDS 2014 ditunjukkan pada Gambar 16.
Gambar 14. Sensor Gyro-Accelerometer dan diagram blok fungsional ADXL335
Gambar 15. Foto rangkaian sensor Gyro-Accelerometer ADXL335 bagian pertama dan kedua
Gambar 16. Output dari FES menggunakan osiloskop
0 10 20 30 40 50 60 70 80 90 0 20 40 60 80 100 120 140 160 180 200 S umbu X S umbu Y S udut ( ⁰) Grafik 1. Sudut accelerometer terhadap sumbu X dan Y
untuk perubahan tiap 10 derajat.
0 10 20 30 40 50 60 70 80 90 0 20 40 60 80 100 120 140 160 180 200 S umbu X S umbu Y S udut ( ⁰) Grafik 2. Sudut accelerometer terhadap sumbu X dan Y
untuk perubahan tiap 5 derajat.
V. KESIMPULAN
Dari hasil pengukuran pada stimulator dengan menggunakan osiloskop digital, terlihat bahwa keluaran FES berupa pulsa, yang lebar dan level pulsanya dapat diatur dengan menggunakan PC. Kemudian pengukuran juga dilakukan pada bagian sensor ADXL335, yang dilakukan dalam dua macam perubahan sudut. Pada Grafik 1, diperlihatkan adanya pengukuran denan perubahan tiap 10⁰, dan pada Grafik 2, diperlihatkan adanya pengukuran denan perubahan tiap 5⁰. Akhirnya, diperoleh adanya perubahan sudut yang lebih maksimal pada perubahan sudut setiap 5⁰. Dari dua hasil pengukuran tersebut, terbukti pula bahwa perangkat
tranciever X-Bee Pro dapat berfungsi dan berhasil mentransfer data dengan baik. Yaitu, dari PC (master) menuju pasien (slave) dan sebaliknya.
REFERENCES
[1] A Kralj and T Bajd, “Functional Electrical Stimulation: Standing
and Walking after Spinal Cord Injury,” CRC Press, Boca Raton, 1989.
[2] L. Vodovnik, T. Bajd, A. Kralj, F. Gracanin, P. Strojnik,
“Functional Electrical Stimulation for Control of Locomotor System,” CRC Critical Review in Biengineering, pp. 63-131, 1981.
[3] N. Hoshimiya, A. Naito, M. Yajima, and Y. Handa, “A
Multichannel FES System for the Restoration of Motor Function in High Spinal Cord Injury Patients,” IEEE Trans. Biomed. Eng., vol. 36, pp. 754-760, 1989.
[4] A. Arifin, T. Watanabe, and N. Hoshimiya, ''Design of Fuzzy Controller of the Cycle-to-Cycle Control for Multi-joint Movements of Swing Phase of Hemiplegic Gait Induced by FES,'' IEICE Trans. Information and Systems, Vol. E89-D, No. 4, pp.1525-1533.
[5] P.E. Cargo, P. H. Peckam, and G. B. Thrope, “Modulation of
Muscle Force by Rectruitment During Intrmuscular
Stimulation,” IEEE Trans. Biomed. Eng., vol. BME-27, pp. 679-1980.
[6] M. Levy, J. Mizrahi, and Z. Susak, “Recruitment, Force, and Fatigue Characteristics of Quadriceps Muscles of Paraplegics Isometrically Activated by Surface Functional Electrical Stimulation,” J. Biomed. Eng.., vol. 12, pp. 150-156, 1990. [7] M. Ferrarin, A. Pedotti, “The Relationship between Electrical
Stimulus and Joint Torque: A Dynamic Model,” IEEE Trans. Rehabl. Eng., vol. 8, pp. 342-352, 2000.
[8] A. Trnkoczy, “Varibiality of Electrically Evoked Muscle
Contraction with Special Regard to Closed-loop Control Orthosis,” Ann. Biomed. Eng., vol. 2, pp. 226-238, 1974.
[9] B.J. Bigland-Ritchie, F. Fulbrush, and J. J. Woods, “Fatigue of
Intermittent Sub-maximal Voluntary Controctions: Central and Peripheral Factors,” J. App. Physiol., vol. 61, pp. 421-429, 1986.
[10] D. R. Mc Neal, R. J. Nakai, P. Meadow, and W. Tu, “Open-loop Control of Freely-swinging Paralyzed Leg,” IEEE Trans. Biomed. Eng., vol. 36, pp. 895-905, 1989.
[11] H. J. Chizeck, R. Kobetic, E. B. Morales, J. J. Abbas, I. H. Donner, and E. Simon, “Control of Functional Neuromuscular Stimulation System for Standing and Locomotion in Paraplegics,” Proc. IEEE, vol. 76, pp. 1155-1165, 1988.
[12] G. T. Yamaguchi, and T. Zajack, “Restoring Unassisted
Natural Gait to Paraplegia via Functional Neuromuscular Stimualtion: A Computer Simulation Study,” IEEE Trans. Biomed. Eng., vol. 37, pp. 886-902, 1990.
[13] J. M. Hausdroff and W. K. Durfee, “Open-loop Position
Control of the Knee Joint Using Electrical Stimulation of the Quadriceps and Hamstrings,” Med. & Biol. Eng. & Computing., vol. 29, pp. 269-280, 1991.
[14] R. Kobetic and E. B. Marsolais, “Synthesis of Paraplegic Gait
with Multichannel Functional Neuromuscular Stimulation,” IEEE Trans. Rehabl. Eng., vol. 2, pp. 66-78, 1994.
[15] K. Kubo, K. Fujita, N. Itakhura, Y. Iguchi, and H. Minatami,
“Simultaneous Closed-loop Control of Knee and Ankle Joints Using Functional Electrical Stimulation,” IEICE Trans. Inf. &. Syst., vol. J71D, pp. 2197-2204, 1998 (in Japanese).
[16] M. S. Hatwell, B. J. Oderkerk, C. A. Sacher, and G. F. Inbar,
“The Development of a Model Target Adaptive Controller to Control Knee Joint of Paraplegic,” IEEE Trans. Automatic Control, vol. 36, pp. 683-691, 1991.
[17] J. J. Abbas and H. J. Chizeck, “Neural Network Control of Functional Neuromuscular Stimulation System: Computer Simulation Studies,” IEEE Trans. Biomed. Eng., vol. 42, pp. 1117-1127, 1995.
[18] G. W. Chang, J. Luh, G. Liao, J. Lai, C. Cheng, B. Kuo, and T.
Kuo, “A Neuro-Control System for the Knee Joint Position Control with Quadriceps Stimulation,” IEEE Trans. Rehabl. Eng. Vol. 5, pp. 2-10, 1997.
[19] Y. Chen, S. Chen, W. Chen, C. Hsiao, T. Kuo, and J. Lai, “Neural Network and Fuzzy Control in FES-assisted Locomotion for the Hemiplegic,” J. Med. Eng. & Tech., vol. 28, pp. 32-38, 2004.
[20] J. Xu, T. H. Lee, H. W. Zhang, “Analysis and Comparison of
Iterative Learning Control Schemes,”Eng. App. AI., vol. 17, pp.
675–686, 2004.
[21] H Dou, K. K. Tan, T. H. Lee, and, Z. Zhou, “Iterative learning
feedback control of human limbs via functional electrical stimulation,” Control Engineering Practice, vol. 7, pp. 315-325, 1999.
[22] A. Arifin, H. Saito, T. Watanabe, “An Error Reduction
Method of Portable, Low-Cost Joint Angle Sensor System for Human Movement Measurement and Control,” IEICE Technical Report, MBE2008-69, pp.31-34, 2008.
[23] H. Saito, T. Watanabe, A. Arifin, “Ankle and Knee Joint
Angle Measurements during Gait with Wearable Sensor System for Rehabilitation,” Proc. World Congress on Medical Physics and Biomedical Engineering 2009, Munich, Germany, pp. 506-509, 2009.
[24] Arifin, Ahmad, Watanabe, Takashi, Matsuko, “Application of
Knowledge Engineering and Fuzzy System in Realizing Cycle-to-Cycle Control Method for Swing Phase of FES-Induced
Gait,” 3rd International Symposium on Medical, Bio and