BAB 2
LANDASAN TEORI
2.1. Visi Komputer
Visi komputer adalah cabang dari kecerdasan buatan yang berfokus pada pengaplikasian komputer untuk fungsi tertentu dari penglihatan manusia. Sampai saat ini, visi komputer telah menghasilkan aplikasi penting dalam bidang-bidang seperti otomatisasi industri, robotika, biomedis, dan observasi satelit dari bumi. Sampai beberapa tahun yang lalu, masalah kronis mempengaruhi sistem visi komputer dan menghambat perkembangannya. Sejak awal, visi komputer telah muncul sebagai bidang komputasi yang intensif dan hampir terselesaikan dengan algoritma yang memerlukan minimal ratusan M IPS (jutaan instruksi per detik) akan dieksekusi secara real time. Bahkan input-output dari gambar resolusi tinggi di rate video secara tradisional
merupakan hambatan untuk komputer pribadi. Untuk mengatasi masalah ini, komunitas riset telah menghasilkan sejumlah penelitian yang mengesankan untuk sistem visi komputer (Picardi & Jan, 2003).
2.2. Kecerdasan Buatan 2.2.1. Definisi
Kecerdasan buatan sudah banyak diaplikasikan sejak dahulu, namun istilah
kecerdasan buatan baru terkenal setelah beberapa orang memberikan gagasan dan
1. M enurut John M cCarthy (1956) kecerdasan buatan adalah ilmu dan rekayasa yang membuat mesin mempunyai intelegensi tertentu khususnya program komputer yang “cerdas”.
2. M enurut H. A. Simon (1987) kecerdasan buatan merupakan kawasan penelitian, aplikasi dan instruksi yang terkait dengan pemrograman komputer untuk melakukan sesuatu hal yang dalam pandangan manusia adalah cerdas.
3. M enurut Rich and Knight (1991) kecerdasan buatan merupakan sebuah studi tentang bagaimana membuat komputer melakukan hal-hal yang pada saat ini dapat dilakukan lebih baik oleh manusia.
M esin kecerdasan buatan memiliki struktur utama untuk menjawab suatu masalah yaitu dengan adanya masukkan/ masalah, pengetahuan dan mesin inferensi untuk menghasilkan keluaran/ hasil.
2.2.2. Tujuan dan Manfaat
Tujuan dibuatnya kecerdasan buatan adalah untuk membuat mesin/ komputer menjadi lebih pintar dan dapat memecahkan masalah yang relatif lebih dinamis dimana manfaat yang diterima oleh manusia tentunya untuk membantu kehidupan manusia dalam melengkapi keterbatasan yang dimiliki manusia itu sendiri antara lain sebagai berikut.
1. M anusia cenderung membuat kesalahan dan tidak konsisten. 2. M anusia memerlukan biaya yang hidup yang lebih tinggi. 3. M anusia terbatas dalam hal waktu dan tenaga.
Disisi lain manusia juga mempunyai kelebihan dibandingkan mesin antara lain sebagai berikut.
1. M anusia mampu menciptakan kreatifitas sehingga mampu menciptakan solusi yang berbeda atas masalah yang sama.
2. Cara pembelajaran manusia dapat dilakukan kapanpun dan dengan inovasi dapat menciptakan solusi dengan hal-hal yang berbeda yang tidak mungkin dihubungkan keterkaitannya oleh mesin.
Karena sifatnya saling melengkapi maka mesin juga memiliki kekurangan dimana kekurangan tersebut belum dapat ditoleransi dan masih menjadi keunggulan dari manusia. Disisi lain mesin juga memiliki keunggulan yang sulit untuk ditoleransi oleh kemampuan manusia antara lain sebagai berikut.
1. Kemampuan dari mesin lebih bersifat permanen selama program dan fisik dari mesin tidak rusak.
2. Kemampuan dari mesin lebih mudah disalurkan ke mesin lainnya sampai seratus persen.
3. Biaya hidup mesin relatif jauh lebih murah, dimana mesin hanya membutuhkan perawatan secara berkala saja.
4. M esin mampu untuk bekerja secara konsisten.
5. Kemampuan dari mesin dapat didokumentasikan sehingga kemampuan dari mesin dapat tersimpan dengan jelas dan tidak akan berkurang performanya.
6. M esin mampu mengerjakan pekerjaan secara lebih cepat dan dapat diatur kecepatannya sesuai kebutuhan.
Berikut tabel perbandingan karakteristik dan kemampuan antara manusia, mesin kecerdasan buatan dan mesin konvesional.
No. Pratinjau aspek Manusia Mesin
kecerdasan buatan
Mesin
konvensional
1. Pemrosesan Algoritmik Sebagian besar
simbolik
algoritmik
2. Input Tidak harus
lengkap Tidak harus lengkap Harus lengkap 3. Pendekatan pencarian dan analisis Heuristik dan algoritmik Sebagian besar heuristik Algoritmik
4. Penjelasan solusi Relatif tersedia Tersedia Relatif tidak tersedia 5. Fokus Pengetahuan dan data Pengetahuan Data 6. Pemeliharaan dan peningkatan
Relatif sulit Relatif mudah Relatif sulit
7. Kemampuan berpikir
logis
Ada Ada Tidak ada
Tabel 2.1. Perbandingan karakteristik antara manusia, mesin kecerdasan buatan dan mesin konvensional.
2.3. Metode Pembelajaran Mesin
Ditinjau dari cara pembelajaran mesin dapat dibagi menjadi dua metode yaitu
supervised learning dan unsupervised learning. Supervised learning merupakan cara
pembelajaran mesin untuk mengenali serta bisa mengklasifikasikan sebuah pola berdasarkan contoh pola yang sudah ada pada data/ kasus yang diberikan kepada mesin. M etode pembelajaran supervised learning sering juga disebut sebagai metode
pembelajaran top down karena pola data sudah diketahui sebelumnya sehingga kita bisa
mengelompokkannya berdasarkan pola yang sama. Unsupervised learning merupakan
diketahui. M etode pembelajaran unsupervised learning sering juga disebut metode
pembelajaran bottom up karena kita tidak mengelompokkan data berdasarkan pola,
melainkan pengelompokan dilakukan berdasarkan struktur intrinsik yang ada pada data. Sebagai contoh supervised learning, jaringan saraf tiruan bekerja dengan cara
mendekati pola data berdasarkan proses pembelajaran sebelumnya dan pola yang telah dipelajari dapat dipergunakan untuk data/ kasus yang serupa.
Gambar 2.1. Ilustrasi proses pembelajaran supervised learning.
Selanjutnya sebagai contoh unsupervised learning, clustering bekerja dengan
menambang informasi dari persebaran masing-masing data kemudian dikelompokkan dan dapat dipergunakan untuk berbagai sebaran data yang beragam.
Gambar 2.2. Ilustrasi pengelompokan data berdasarkan warna dan jarak euclid. Pemilihan data yang digunakan dalam melakukan pengelompokan tergantung dari korelasi data tersebut dengan kasus yang dihadapi, semakin tinggi korelasinya maka semakin baik dalam merepresentasikan kelompok dari data.
2.4. Citra Digital
Citra digital adalah barisan ataupun matrik dari kotak-kotak piksel yang tersusun dalam baris dan kolom. Furst (2004) menjelaskan setiap piksel di parameterkan dengan posisi, intensitas dan waktu frame. Intensitas pada piksel memiliki dua tipe yaitu satu channel dan tiga channel warna.
Gambar 2.3. Citra (kiri) true colour,citra (kiri tengah) grayscale, citra (kanan tengah
dan kanan) perbesaran citra.
Untuk menciptakan citra Grayscale dari citra RGB dari tiga channel warna
menjadi satu channel warna dengan mengkonversi nilai intensitas merah (R), hijau (G),
dan biru (B) setiap piksel dengan persamaan Y=(0.299)R+(0.587)G+(0.114)B, kemudian ketiganya dijumlahkan untuk mendapat nilai grayscale (Y) pada piksel.
Gambar 2.4. Citra (kiri) threshold warna dan citra (kanan) threshold biner.
Terdapat dua citra threshold yaitu threshold warna dan threshold biner. Untuk
menciptakan citra threshold warna maka sumber citra warna asli dapat langsung dikonversi menjadi citra threshold warna. Batas ambang (threshold) dipergunakan
untuk setiap channel warna merah, hijau dan biru.
( )
( )
( )
⎩ ⎨ ⎧ < ≥ = ⎩ ⎨ ⎧ < ≥ = ⎩ ⎨ ⎧ < ≥ = θ B , 0 θ B , 255 B f ; θ G , 0 θ G , 255 G f ; θ R , 0 θ R , 255 R f
Untuk menciptakan citra threshold biner maka diperlukan citra Grayscale
dimana channel yang dipergunakan telah menjadi satu channel. Batas ambang (threshold) dipergunakan untuk menentukkan konversi nilai piksel menjadi 0 dan 255.
Persamaan berikut menjelaskan cara untuk melakukan threshold biner.
( )
⎩ ⎨ ⎧ < ≥ = θ Y , 0 θ Y , 255 Y f 2.5. Video DigitalVideo merupakan urutan citra yang berkesinambungan yang bergerak dalam ruang waktu dan memiliki suatu makna. Video memiliki parameter yang dapat diturunkan dari parameter sebuah citra yaitu lebar dan tinggi citra yang diukur berdasarkan jumlah piksel horisontal dan vertikal, dan kemudian juga parameter kedalaman citra. Sebuah video juga memiliki parameter kecepatan berpindah dari satu citra/ frame ke frame yang selanjutnya, biasa kita sebut dengan fps (frames per second)/ frame rate.
Gambar 2.5. Ilustrasi sebuah video mulai dari frame 1 hingga frame 8 dari
(demo.activemath.org/ActiveM ath, 2012)
Setiap citra pada ilustrasi tersebut memiliki lebar dan tinggi yang sama mulai dari citra satu hingga kedelapan. Urutan gambar tersebut adalah sebuah video bila
antara satu frame dengan frame yang lainnya memiliki suatu nilai keterhubungan makna
seperti yang ditunjukkan pada gambar berikut.
Gambar 2.6. Contoh urutan citra dari sebuah video dari (skateboarders.le-site-du-skateboard.com/ben-hatchell/ben-hatchell-sequence, 2012)
Pada gambar. menunjukkan sebuah contoh video yang diperlihatkan urutan dari setiap citra yang diambil. Bila urutan citra tersebut dijalankan satu persatu maka akan memberikan suatu makna pergerakkan orang sedang bermain papan seluncur.
2.6. Subtraksi Latar Adaptif dengan Model Gaussian
Hal yang paling mendasari aktifitas dari pemantauan real time adalah dengan
mengetahui adanya pergerakkan dari objek di dalam sebuah latar. Subtraksi latar mempunyai peranan penting dalam visi komputer yaitu dalam hal sistem pemantauan atau sekuriti. Peranan yang dilakukan dalam subtraksi latar adalah mengetahui atau membedakan bagian latar dan objek yang ada pada sebuah citra. Untuk mengetahui adanya objek didalam citra maka hal yang harus dilakukan adalah dengan mempelajari
atau mengetahui model dari latar. Ide dasar dari subtraksi latar adalah threshold
background
framei − > , bila piksel ke i memenuhi persamaan tersebut, maka piksel tersebut digolongkan kedalam kelompok piksel objek dan selain itu adalah latar.
Gambar 2.7. (kiri) latar, (tengah) latar dan objek, (kanan) objek yang terdeteksi dengan subtraksi latar dari (www.cs.unc.edu/~lguan/Research.files/Research.htm).
Gambar 2.11. menunjukkan pemisahan objek pada latar dengan mengetahui latar terlebih dahulu. Bila menggunakan metode konvensional subtraksi latar menggunakan latar statik, objek yang ada pada latar memang akan tersegmentasi dengan bersih, tetapi kekurangannya adalah latar yang dipergunakan diluar ruangan cenderung mengalami perubahan, terutama perubahan mikro seperti pergerakkan dahan pohon. Oleh karena itu kita menggunakan subtraksi latar yang adaptif dengan model
Mixture of Gaussian untuk pengaplikasian pada lingkungan terbuka. Kelemahan dari
subtraksi latar adaptif ini adalah subtraksi latar mungkin saja tidak menunjukkan hasil yang sempurna seperti yang ditunjukkan pada gambar 2.11. sebelah kanan.
Metode Adaptive Background Subtraction dengan model Mixture of Gaussian
dijelaskan oleh (Stauffer & Grimson, 1999) adalah sebagai berikut. Setiap piksel
X
i akan mengalami perubahan intensitas selama t waktu,{
X1,...,Xt} (
={
I x0,y0,i)
:1≤i≤t}
dimana I merupakan urutan dari citra/ frame. Setiap piksel sampai ke waktu t,
{
X1,...,Xt}
dimodelkan dengan distribusi Mixture of Gaussian. Peluang setiap piksel sampai ke waktu t dijelaskan oleh persamaan berikut,( )
(
t i,t i,t)
K 1 i i,t t ω ηX,μ ,σ X P =∑
= ∗dimana K adalah angka distribusi dan ditentukan berdasarkan kapasitas memori dan kekuatan komputasi, ωi,t adalah perkiraan bobot dari Gaussian ke i didalam mikstur pada waktu t, μi,t adalah nilai rataan dari Gaussian ke i didalam miksture pada waktu t,
t i,
σ adalah matriks standar deviasi dari Gaussian ke i didalam mikstur pada waktu t, dan η adalah fungsi kepadatan peluang pada persamaan berikut.
(
)
( )
(Xt μt)Tσ1(Xt μt) 2 1 2 1 2 n t t t e σ 2π 1 σ , μ , X η − − − − = .Matriks standar deviasi ditentukan berdasarkan persamaan berikut, σ σ2I k t
k, = , dengan asumsi warna merah, hijau dan biru pada sebuah piksel tidak saling terkait dan mempunyai keragaman yang sama.
Setiap piksel di cek dengan distribusi K Gaussian sampai ditemukan nilai
piksel yang sesuai. Kesesuaian di definisikan sebagai nilai piksel dengan nilai standar deviasi 2,5. Jika tidak ada satupun yang sesuai antara distribusi K dengan nilai piksel, maka nilai distribusi tidak mengalami perubahan.
Bobot dari distribusi K pada waktu t ditentukan oleh persamaan berikut,
(
)
k,t 1(
k,t)
tk, 1 α ω α M
ω = − − + ,
dimana α adalah nilai kecepatan pembelajaran dan Mk,tbernilai 1 untuk model yang sesuai dan 0 untuk yang lainnya. Setelah melakukan update, bobot akan di normalisasikan kembali.
Parameter μ,σ tetap bernilai sama untuk distribusi yang tidak sesuai, bila
sesuai dengan distribusi maka nilai parameter yang baru diubah berdasarkan persamaan berikut,
(
)
t-1 t t 1 ρ μ ρX μ = − + ;(
)
(
) (
T t t)
t t 2 1 t 2 t 1 ρ σ ρ X μ X μ σ = − − + − − ; ρ=αη(
Xt|μk,σk)
. Distribusi dipilih sebagai latar dan apabila memenuhi persamaan berikut dan selain itu dipilih sebagai objek,⎟ ⎠ ⎞ ⎜ ⎝ ⎛ > =
∑
= b 1 k k b ω T argmin Bdimana T adalah nilai pertimbangan minimum dari data.
2.7. Dilatasi dan Erosi Citra 2.7.1. Dilatasi Citra
Dilatasi citra merupakan penambahan piksel pada tepi citra dengan intensitas piksel yang sama. Penambahan tepi dilakukan dengan menggunakan kernel. Kernel
dalam hal ini merupakan alat ukur untuk membantu penambahan piksel dengan ukuran minimal 3x3 piksel. Penambahan piksel citra A dengan menggunakan kernel B ditunjukkan gambar berikut.
Gambar 2.8. Penambahan citra A dengan menggunakan kernel B 3x3 piksel memberikan hasil citra A⊕B dari (Bradski & Kaehler, hal. 116)
Kernel B bekerja dengan cara menambahkan piksel dengan intensitas yang sama pada pusat dari kernel, ditandai dengan bintang, keseluruh bagian mengitari tepi citra A sehingga tepi pada citra A akan bertambah lebar sesuai dengan ukuran kernel yang digunakan. Bila menggunakan kernel berukuran 3x3 piksel maka tepi citra akan ditambahkan satu piksel karena pusat kernel berada pada tepi citra.
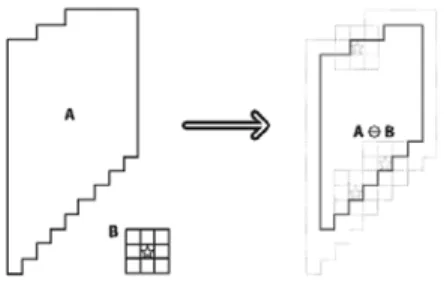
2.7.2. Erosi Citra
Erosi citra merupakan pengurangan piksel pada tepi citra. Pengurangan piksel dilakukan dengan menggunakan kernel. Kernel dalam hal ini merupakan alat ukur untuk
membantu pengurangan piksel dengan ukuran minimal 3x3 piksel. Pengurangan piksel citra A dengan menggunakan kernel B ditunjukkan gambar berikut.
Gambar 2.9. Pengurangan citra A dengan menggunakan kernel B 3x3 piksel memberikan hasil citra ܣ ٚ ܤ dari (Bradski & Kaehler, hal. 117)
Kernel B bekerja dengan cara mengurangi piksel, keseluruh bagian mengitari tepi citra A sehingga tepi pada citra A akan menyusut sesuai dengan ukuran kernel yang digunakan. Bila menggunakan kernel berukuran 3x3 piksel maka tepi citra akan dikurangkan satu piksel karena penghapusan piksel dilakukan sampai batas pusat dari
kernel.
2.8. Pelacakan Optical Flow Lucas Kanade
Pelacakkan titik fitur menggunakan algoritma Lucas-Kanade untuk menentukkan posisi titik fitur pada frame sebelumnya ke frame selanjutnya.
Gambar.2.10. Ilustrasi pelacakan titik fitur.
Tujuan dari algoritma Lucas-Kanade adalah untuk menemukan sebuah
template citra
T
( )
x
didalam sebuah citraI
( )
x
dimana x merupakan x=( )
x,y Tadalah vektor dari koordinat piksel pada citra.
Maka perpindahan sebuah template pada citra
T
( )
x
ke citraI
( )
x
olehpersamaan berikut.
( )
⎜⎜⎝⎛ ⎟⎟⎠⎞ + + = 2 1 p y p x p x; W dimanaW
( )
x;
p
merupakan fungsi warp parameter x dan p merupakan vektor optical flow. Perpindahan affine pada template secara 3 dimensi pada citra oleh persamaan
berikut,
( ) (
)
(
)
⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ + + = ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ + + + + + + = 1 y x p p 1 p p p p 1 p p 1 .x p p .y p .x p 1 p x; W 6 4 2 5 3 1 6 4 2 5 3 1dimana terdapat 6 parameter
(
)
T6 5 4 3 2 1,p ,p ,p ,p ,p p
p= pada ruang 3 dimensi.
Tujuan dari algoritma Lucas Kanade adalah untuk meminimalkan kesalahan penemuan template citra
T
( )
x
didalam sebuah citraI
( )
x
yang digambarkan pada persamaan berikut,( )
(
) ( )
[
]
2 x x T p x; W I∑
− .Pencarian nilai p pada citra yaitu tidak linear oleh karena itu Lucas-Kanade mengasumsikan nilai p telah diketahui dan diperbaiki oleh nilai Δp secara iteratif dan menambahkan persamaan menjadi
(
)
(
) ( )
[
]
2 x x T Δp p x; W I∑
+ − .Pencarian nilai p dibatasi oleh minimal error Δp ≤ε.
Penggunaan ekspansi Taylor orde pertama dipergunakan sebab perpindahan jarak template sangatlah kecil sehingga menambahkan nilai Δp menjadi
( )
(
)
( )
2 x x T Δp p W I p x; W I∑
⎢⎣⎡ +∇ ∂∂ − ⎥⎦⎤ dimana ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ ∂ ∂ ∂ ∂ = ∇ y I , x II merupakan gradien koordinat frame pada citra I ke koordinat
frame pada citra T dan nilai jacobian dari W oleh persamaan berikut.
⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ n y 2 y 1 y n x 2 x 1 x p W p W p W p W p W p W p W L L
Untuk menemukan jalan koordinat posisi template pada citra T ke citra I maka
digunakan metode steepest descent yaitu
p W I
∂ ∂
∇ sehingga menambahkan persamaan
menjadi
( )
(
)
( )
∑
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ∂ ∂ ∇ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∇ x T x T Δp p W I p x; W I p W I 2 .Untuk menemukan nilai Δp maka dipergunakan matriks Hessian yang
ditemukan melalui persamaan berikut,
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∇ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∇ =
∑
p W I p W I H T xsehingga nilai Δp dapat ditemukan oleh persamaan berikut,
( )
(
( )
)
[
T x I W x;p]
p W I H Δp x T 1 − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∇ = −∑
Sehingga dengan demikian posisi jendela pendeteksian dapat ditentukan pada citra
(
)
(
W x;p Δp)
Gambar 2.12. Algoritma Optical Flow Lucas Kanade dari (Baker & M atthews, 2002).
Algoritma Optical Flow Lucas Kanade adalah sebagai berikut:
1. Temukan template dengan perkiraan pada citra I dengan menggunakan
( )
x;
p
W
untuk menghitungI
(
W
( )
x;
p
)
. 2. Hitung nilai kesalahanT
( )
x
−
I
(
W
( )
x;
p
)
. 3. Tentukan nilai gradien I∇ denganW
( )
x;
p
. 4. Hitung nilai jacobianp W ∂ ∂
5. Hitung nilai steepest descent
p W I ∂ ∂ ∇ .
6. Hitung nilai matriks Hessian.
7. Hitung persamaan
[
T( )
x I(
W( )
x;p)
]
p W I x T − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∇∑
. 8. Hitung nilai Δp . 9. Update parameter p.10. Ulangi algoritma hingga Δp ≤ε
2.9. Pendeteksian Titik Fitur Handal untuk Pelacakan
Hal terpenting dari sebuah titik fitur adalah titik tersebut dapat dibedakan dari titik-titik yang ada disekitarnya. Hal tersebut perlu dilakukan untuk menemukan perpindahan posisi titik pada frame yang berbeda. Titik fitur yang baik ditentukan dari
tekstur area pendeteksian. Nilai tekstur yang baik diidentikan dengan nilai eigen pada area tersebut, semakin tinggi nilai eigen maka semakin baik tekstur yang dimiliki. Titik fitur yang baik akan tetap mempertahankan posisinya dan memperbesar peluang keberhasilan pelacakan titik fitur.
Gambar 2.13. Tekstur pada area pendeteksian titik fitur.
M etode Good Features to Track oleh Shi & Tomasi (1994) dikembangkan
berdasarkan penelitian dari Lucas-Kanade dimana tingkat kesalahan pemetaan titik fitur dari citra template ke citra selanjutnya adalah minimum. Target dari metode Good
Features to Track adalah menentukan area pendeteksian titik fitur dengan nilai eigen
berada diatas nilai threshold yang ditentukan. Semakin tinggi nilai eigen maka semakin baik kualitas dari titik fitur dan semakin jarang juga jumlah titik fitur yang diterima. Penurunan rumus nilai eigen dijelaskan sebagai berikut. Citra diformulakan sebagai sebuah vektor xr, begitu juga dengan perpindahan dr dan nilai gradient gr.
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = y x 2 1 g g g , d d d , y x xr r r
Berdasarkan teori pelacakan lucas-kanade, pemetaan citra J ke I diperoleh apabila tingkat kesalahan ε minimum.
( )
( )
(
I x d J x)
wdx ε 2 W r r r r∫
− − =Ekspansi deret taylor orde satu dipergunakan untuk mengubah persamaan sebab nilai perpindahan dr diasumsikan sangat kecil.
( )
( )
(
I x g.d J x)
wdx ε 2 W r r r r r∫
− − =Penyederhanaan persamaan dilakukan dengan mengubah I−J=h menjadi persamaan berikut dimana nilai h merupakan vektor selisih citra I dan J.
( )
(
h x g.d)
wdx ε 2 W r r r r∫
− =Tingkat kesalahan akan minimum apabila ε diturunkan terhadap dr adalah nol dan ruas persamaan sebelah kanan juga diturunkan terhadap dr.
0 d ε = ∂ ∂ r
∫
(
( )
)
⎜⎜⎝⎛(
( )
)
⎟⎟⎠⎞ ∂ − ∂ − = ∂ ∂ W d wdx d . g x h d . g x h 2 d ε r r r r r r r r r( )
(
)
(
( )
)
(
( )
)
∫
− ⎜⎜⎝⎛∂ −∂ − ∂ −∂ − ⎟⎟⎠⎞ = ∂ ∂ W 1 2 y 1 x 1 2 y 1 x wdx d d g d g x h d d g d g x h d . g x h 2 d ε r r r r r r r
( )
(
)
(
)
∫
− − = ∂ ∂ W 2h x g.d gx gy wdx d ε r r r r r( )
(
)
∫
− − = ∂ ∂ W 2h x g.dgwdx d ε r r r r r r ; =−∫
(
( )
−)
∂ ∂ W h x g g.d.g wdx 2 d ε r r r r r r rPenyederhanaan persamaan dilakukan dengan melakukan perkalian vektor gr.dr.gr sebagai berikut.
(
)
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ y x 2 y 1 x y x 2 1 y x g g d g d g g g . d d . g g(
)
gg d d d g g g g d g d g g d g g d g t 2 1 y x y x 2 2 y 1 y x 2 x y 1 2 x =rr r ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + +Sehingga persamaan gr.dr.gr diformulakan menjadi rggrtdr untuk mendapatkan nilai eigen G sebagai penentuan baik dan buruknya tekstur pada area pelacakan.
( )
(
)
∫
− − = ∂ ∂ W t.d wdx g . g g x h 2 d ε r r r r r r rNilai kesalahan sama dengan nol dimasukkan kedalam persamaan untuk menyederhanakan persamaan sebagai berikut.
( )
(
)
∫
− = W t.d wdx g . g g x h 0 r r rr r r( )
(
)
∫
(
)
∫
= W t W h x g wdx g.g .d wdx r r r r r r rIntegral W merupakan integral terhadap vektor dan akan diekspansi menjadi integral terhadap x dan y. Perpindahan drmerupakan nilai pemetaan dari citra J ke I sehingga dapat kita pisahkan.
( )
(
)
∫∫
(
)
∫∫
h xrgr w.dx.dy= gr.grt.drw.dx.dy( )
(
h xr gr)
w.dx.dy(
∫∫
( )
gr.grt w.dx.dy)
.dr∫∫
=
d G.
e r
r=
Semakin besar nilai eigen G yang diperoleh maka akan semakin kecil menemukan adanya noise pada area jendela pendeteksian. Sebuah jendela pendeteksian dapat
diterima apabila
λ
)
λ
,
min(
λ
1 2>
dimana
λ
1,
λ
2adalah kedua nilai eigen pada vektor G dan λ merupakan nilai thresholdyang ditentukan.
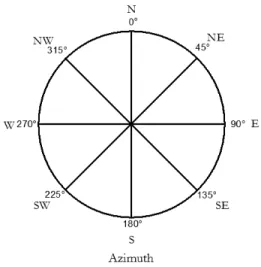
2.10. Kuadran Azimuth
Teori Azimuth dipergunakan untuk menentukkan sudut arah gerak dari sebuah titik fitur pada frame pertama dan kedua didalam sebuah kuadran azimuth dengan rentang nilai sudut adalah 0°≤θ≤360°. Sudut dihitung berdasarkan perputaran arah jarum jam dan menjadikan sumbu y sebagai patokan awal sudut θ=0°.
Untuk mencari sudut azimuth yang pertama harus kita lakukan adalah menghitung nilai α berdasarkan dua titik yang dimodelkan pada kuadran kartesian berdasarkan arah kemiringannya seperti pada gambar berikut.
Gambar 2.15. M odel sudut dua titik pada empat kuadran kartesian.
Setelah model dua titik yang kita miliki masuk kedalam salah satu kuadran, selanjutnya kita menghitung nilai α berdasarkan rumus tangensial dan kemudian sudut azimuth dapat ditentukan, dijelaskan berdasarkan tabel berikut.
kuadran α Bx −Ax By−Ay
Azimuth
( )
θ
I ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = − y y x x 1 A B A B tan α + _ θ= α II + + θ=180°− α III _ + θ=180°+ α IV _ _ θ =360°− α
Pada tabel kuadran Azimuth hasil selisih koordin at kedua titik fitur p ositif ataup un
negatif dip ergunakan untuk menentukkan nilai θ y ang berada p ada kuadran I, II, III ataup un IV.
2.11. Penelusuran Graph
Penelusuran graph dip ergunakan untuk men getahui titik-titik fitur y ang salin g
terhubung. Kita memp uny ai p asangan-p asangan titik fitur y ang salin g terhubun g dan memp uny ai bobot y ang baik. Keterikatan p asangan-p asangan titik fitur diketahui melalui kesamaan identitas titik fitur kiri dan kanan p ada p asangan-p asangan y ang ad a.
Gambar. 2.16. Ilustrasi p enelusuran graph.
Pada ilustrasi tersebut koneksi y ang masih terp isah dibedakan dengan warna y ang berbeda. Seb agai contoh, koneksi p ada titik fitur 1, 2, dan 3 dihubun gkan oleh titik fitur 1 sebagai titik fitur kiri p ada koneksi merah dan sebagai titik fitur kanan p ada koneksi hijau. Grap h ditelusuri den gan meny imp an identitas titik fitur y ang sudah dikunjun gi dan terus dilakukan p enelusuran kekiri dan kekanan hin gga semua titik fitur tersimp an.
2.12. Analisis Pemecahan Masalah
Pemecah an masalah dilakukan den gan p roses segmentasi dan p erhitungan objek y ang terdiri d ari dua k elomp ok p roses utama. Proses p ertama disebut p ersiap an sebaran data dan kelomp ok p roses kedua adalah segmentasi objek.
Gambar 2.17. Dua buah p roses segmentasi utama.
Pada gambar tersebut dijelaskan bahwa p ersiap an sebaran data dilakuk an sebelum melakukan segmentasi objek, oleh karen a itu p ersiap an sebaran d ata men jadi sangat p enting ketika data p ergerakkan y ang d ihasilk an, dip ergun akan dalam segmentasi objek.
Berikut adalah aktifitas utama did alam kedu a p roses p ersiap an sebaran data dan p roses segmentasi objek. Persiap an sebaran d ata selalu dilakukan untuk setiap
frame dikarenakan adany a p elacakan titik fitur y ang dip ergunakan untuk memp eroleh
data p ergerakkan objek disetiap frame. Sedan gkan segmentasi objek hany a dilakukan
dalam jan gka waktu 7 frame sekali setelah data p ergerakkan d ip eroleh.
Gambar 2.18. Aktifitas utama dalam p roses p ersiap an sebaran data.
Subtraksi latar mengalami p erbaikan p roses dikarenakan p emisahan latar dan objek tidak dih asilkan den gan semp urna. Oleh karena itu didalam aktifitas subtraksi
latar p erlu ad any a p roses p erbaikan citra blob / b inari untuk memp erjelas area p endeteksian titik fitur.
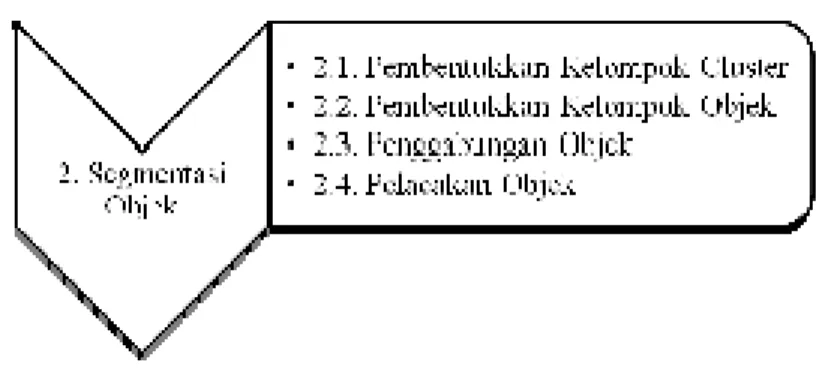
Gambar 2.19. Aktifitas utama dalam p roses segmentasi objek.
Aktifitas p embentukkan kelomp ok cluster adalah aktifitas dimana titik fitur y ang telah diambil data p ergerakk anny a selama 7 frame dianalisis relasi antar titik
fiturny a untuk mendefinisikan bobot koneksi. B ila bobot y ang dimilik i bern ilai d iatas
threshold, maka titik fitur y ang terhubung dalam koneksi ak an dikelo mp okkan menjadi
masin g-masin g cluster.
Aktifitas p embentukkan kelomp ok objek adalah aktifitas dimana
cluster-cluster y ang telah terbentuk digabun gkan menjadi satu kelomp ok objek ap abila
memiliki relasi y ang baik. Hal tersebut dilakukan karena ad any a kemungk inan terdap at beberap a cluster didalam sebuah kendaraan. Hal in i diseb abkan karen a cluster-cluster
terbentuk terp isah jauh melebihi nilai batas jarak antar titik fitur y ang ditentukan. Oleh karena itu p osisi dua buah titik fitur y ang berjauhan p ada sebu ah kend araan membuat bobot koneksiny a menjadi lemah dan tidak terseleksi.
Kelomp ok objek y ang terbentuk bisa memiliki titik fitur y ang sama dalam beberap a objek. Hal ini d isebabkan karen a titik fitur secara indep enden dap at tergabun g dengan objek manap un dan san gat mun gk in status keanggotaan titik fitur tersebut berada didalam b eberap a objek berb eda y ang berd ekatan. Untuk mengantisip asi hal ini
maka perlu penggabungan objek-objek yang saling beririsan keanggotaan titik fiturnya. Objek dengan anggota titik fitur yang lebih banyak akan dijadikan penampung sedangkan objek lainnya akan dihapus.
Setelah perbaikkan kelompok objek maka langkah selanjutnya adalah melakukan pemantauan objek untuk memastikan keberadaan objek masih terdapat didalam layar serta menghitung jumlah objek pada layar dan jumlah total objek yang terdeteksi. Pemantauan keberadaan objek berkorelasi secara langsung dengan keberadaan titik fitur objek yang berada pada layar.
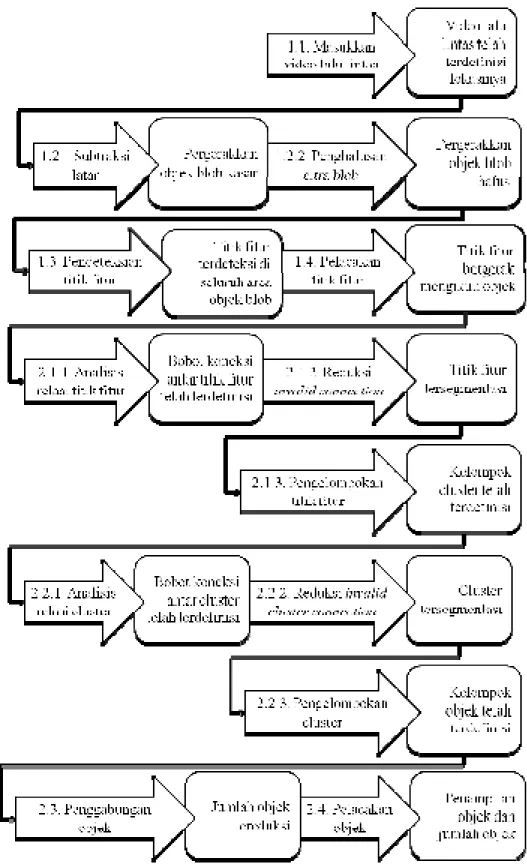
Pemilihan metode yang tepat untuk masing-masing proses didalamnya akan memperbesar keakuratan data yang dihasilkan. Alur segmentasi lebih detil dijelaskan pada gambar berikut.
Pada gambar tersebut tanda panah menunjukkan proses disetiap tahapnya dan kotak adalah hasil dari proses yang dilakukan. Gambar tersebut menunjukkan proses yang berjalan secara linear dan sistematis mulai dari masukkan video hingga penampilan jumlah objek. Walaupun demikian program dibuat secara berulang, sehingga proses diatas merupakan satu dari seluruh jumlah frame yang ada dari video
masukkan yang dilakukan perulangan hingga frame pada video telah habis diproses.
Sebuah proses dapat memiliki sub proses lainnya yang ditunjukkan dengan penomoran pada gambar tersebut. Berikut penjelasan yang lebih mendalam untuk setiap proses yang dilakukan.
2.12.1. Subtraksi Latar
Berbagai teknik subtraksi latar telah dijelaskan oleh para peneliti, namun teknik yang dipilih untuk melakukan subtraksi latar adalah dengan menggunakan metode Adaptive Background Mixture dengan menggunakan Mixure of Gaussian yang
dijelaskan oleh Stauffer & Grimson (1999). Teknik subtraksi latar ini dipilih karena dapat beradaptasi dengan model latar yang dinamis, misalnya pergerakkan dahan dan ranting pohon, pembangunan jalan dan gedung. Semua objek tersebut menetap diarea latar dan bergerak hanya sesaat, oleh karena itu objek tersebut akan dianggap sebagai gangguan sesaat ketika melakukan pemantauan. Penggunaan model latar yang dinamis dengan cepat akan menghilangkan gangguan tersebut. Tujuan dari penggunaan subtraksi latar pada pendekatan titik fitur adalah untuk memperkecil area deteksi titik fitur. Pendeteksian dilakukan pada area objek yang bergerak saja, sehingga pendeteksian titik fitur dapat direduksi untuk bagian latar.
2.12.2. Penghalusan Citra Blob
Citra blob adalah citra dimana intensitas warnanya hanya terdiri dari warna hitam dan putih yang biasa juga dipanggil dengan sebutan citra binari. Proses dilatasi dan erosi citra dilakukan untuk memperhalus hasil dari subtraksi latar, dimana hasil subtraksi masih memiliki partikel halus citra binari. Dengan melakukan dilatasi dan erosi, partikel halus tersebut dapat digabungkan menjadi satudengan citra binari yang lebih besar. Citra binari yang telah diperhalus ditujukan untuk memperjelas area pendeteksian titik fitur pada tahap selanjutnya.
2.11.3.Pendeteksian Titik Fitur
Titik fitur merupakan kunci sukses dalam melakukan pelacakan titik fitur. Titik fitur yang baik akan sangat diandalkan ketika melakukan pelacakan objek berdasarkan informasi yang diberikan oleh titik fitur. Titik fitur yang baik ditandai dengan stabilitas titik di area objek. Untuk mendapatkan titik fitur yang baik maka teknik yang dipilih adalah dengan menggunakan metode Good Features to Track oleh Shi & Tomasi
(1994), dimana titik fitur yang dipilih merupakan titik yang berada pada daerah tekstur yang tinggi sehingga sangat baik untuk digunakan dalam pelacakan pada frame
selanjutnya.
2.11.4. Pelacakan Titik Fitur
Pelacakan titik fitur pada setiap frame sangat diperlukan untuk mengetahui
khas pergerakkan dari setiap objek. Setiap titik fitur yang dihasilkan akan merepresentasikan sebuah daerah dari masing-masing objek yang bergerak. Oleh karena itu keberhasilan untuk melacak setiap titik pada frame selanjutnya akan menentukkan
keberhasilan dalam melakukan segmentasi objek. Teknik yang digunakan untuk melakukan pelacakan titik fitur adalah dengan menggunakan metode Pyramidal
Implementation of The Lucas-Kanade Tracking untuk mendapatkan hasil lacak yang
baik.
2.11.5. Analisis Relasi Titik Fitur
Setiap objek akan direpresentasikan dengan menggunakan pergerakkan banyak titik fitur. Maka dua buah titik fitur akan berada pada objek yang sama bila memiliki pergerakkan yang sama. Pergerakkan dua buah titik yang sama akan memiliki bobot koneksi yang besar dan bobot yang lemah akan diprediksikan sebagai koneksi antar dua buah objek yang berbeda. Bobot koneksi antar titik di rumuskan dalam persamaan berikut, 4 / ) s s ( ei,pq = pq,space + pq,motion
dimana ei,pq merupakan bobot koneksi ke i, spq,space merupakan nilai analisis bobot dari jarak euclid kedua titik pada koneksi dan spq,motionmerupakan nilai analisis kesamaan gerak dari kedua buah titik fitur.
Pada penelitiannya, kasus yang dihadapi adalah pelacakan dan penghitungan orang di dalam keramaian sehingga Sahagun (2007) menggunakan analisis Fourier berdasarkan frekuensi dari pergerakkan orang dalam t waktu untuk menghasilkan segmentasi yang lebih presisi. Tetapi dalam pekerjaan kali ini kasus yang dihadapi adalah pelacakan dan penghitungan kendaraan dimana frekuensi yang dihasilkan oleh pergerakkan orang tidak terdapat pada pergerakkan kendaraan. Oleh karena itu analisis frekuensi tidak dapat dilakukan.
Untuk memp ermudah p enilaian bobot koneksi maka dilakuk an p engskalaan nilai antara nol samp ai satu dengan men ggun akan fungsi p emetaan kuadrat cosinus
sebagai berikut (Sahagun, 2007, h al. 27).
(
)
⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ > ≤ ≤ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∗ < = max max max 2 max F n n , 0 n n 0 , 2 π n n cos 0 n , 1 n n, MDi ilustrasikan dalam gamb ar berikut,
Gambar 2.21. fun gsi Falling Mapping
M
F dari (Sahagun, 2007, h al. 26)Fungsi Falling Mapping dip ergunakan untuk tip e karakteristik nilai n y ang bila
semakin besar nilainy a maka bobot nilai fun gsi akan semak in kecil d alam hal ini korelasi p arameter den gan objek b ergerak akan semakin lemah.
2.11.5.1.Analisis S pasial
Peluan g dua buah titik berad a dalam objek y ang sama akan san gat ditentukan dari jarak euclid kedu any a. Semakin dekat jarak k edua titik maka p eluan g kedu a titik tersebut dalam sebu ah objek akan semakin besar, kebalikanny a bila semak in jauh maka p eluang k edua titik tersebut dalam satu objek y an g sama ak an semakin k ecil. Jarak euclid k edua titik dap at dihitung berdasarkan p ersamaan berikut,
(
)
(
)
2 y y 2 x x pq p q p q d = − + −dimana
p
idanq
imerup akan titik fitur p dan q p ada frame y ang sama dan nilai bobot sp asial kedua titik fitur dihitung berdasarkan p ersamaan berikut, spq,space= MF(
dpq,dmax)
dimana dmaxmerup akan nilai jarak maksimal antar dua titik y aitu tiga p ersen dari leb arframe, y ang ditentukan secara emp iris.
Gambar 2.22. Jarak Eu clid antara titik fitur P dan Q p ada frame i
Titik fitur P dan Q p ada sebuah frame merup akan sebuah contoh p asangan du a buah titik fitur dari jumlah total keseluruh an p asangan len gk ap y aitu n*(n – 1)/2 dimana P tidak sama dengan Q. Jarak euclid k edua titik fitur dihitung den gan men ggunakan algoritma phytagoras dikaren akan besarny a p eluan g P x tidak sama den gan Q x dan Py
tidak sama den gan Qy.
2.11.5.2.Analisis Gerak
Kemungk inan du a buah titik berad a dalam sebuah objek y ang sama adalah dengan adany a p ergerakkan y ang sama dalam waktu t. Kesamaan gerak dari dua buah
titik antara lain seperti stabilitas jarak/ koherensi gerak dan koeksitensi trayek yang meliputi kesamaan jarak tempuh, kesamaan arah gerak dan kesamaan gradien gerak. Kesamaan gerak dua buah titik dapat dihitung berdasarkan persamaan berikut,
e coexistanc pq, coherence pq, motion pq, s s s = +
berdasarkan penelitian Sahagun (2007) dan Lien (2007) dengan beberapa modifikasi.
2.11.5.3.Koherensi Gerak
Stabilitas jarak dua titik yang bergerak dalam waktu t menandakan kedua buah titik tersebut mengikuti gerakkan objek yang sama dengan luasan objek yang stabil dalam waktu t. Walaupun objek bergerak dalam bidang citra yang perspektif, namun perhitungan koherensi dua buah titik dilakukan dalam n frame yang telah diuji secara
empiris sehingga nilai keragaman jarak keduanya masih dalam batas maksimal threshold keragaman ( 2
max
σ ) yang telah ditentukan. Nilai keragaman ditentukan berdasarkan persamaan berikut,
2 2 n 1 i pq n 1 i 2 pq 2 n d n d σ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − =
∑
=∑
=dimana d merupakan jarak Euclid dua titik yang dihitung dalam n pq frame. Untuk menentukkan nilai koherensi yaitu dengan menggunakan persamaan berikut,
(
2)
max 2 pq F coherence pq, M σ ,σ s = dimana 2 maxσ merupakan batas threshold nilai keragaman stabilitas sebuah koneksi yaitu kurang dari lima piksel yang ditentukan secara empiris.
Gambar 2.23. Ilustrasi stabilitas jarak Eu clid du a titik fitur p ada frame i, j, dan k.
2.11.5.4.Koeksitensi Trayek
Selain koh erensi dua titik fitur diukur, p engukuran ko eksistensi dua titik fitur juga diukur untuk memastikan kedu a titik tersebut memilik i p ergerakkan y ang sama y ang diasumsikan berad a p ada objek y ang sama. Koeksistensi tray ek melip uti dua p engukuran did alamny a y aitu kesamaan jarak temp uh dan kesamaan arah gerak. Nilai bobot koeksistensi tray ek dari dua buah titik fitur akan dihasilkan o leh p ersamaan berikut, spq,coexistance =spq,movement +spq,direction.
2.11.5.5.Kesamaan Jarak Tempuh
Setiap titik y ang melekat p ada tekstur objek akan men gikuti p ergerakk an objek dimana jarak y an g ditemp uh oleh objek mak a ju ga merup akan jarak y ang d itemp uh oleh titik – titik fitur y ang berada disekitarny a. Tetap i sebelum membahas jarak temp uh dua titik, ada sebuah isu dari hasil p ercobaan tray eksi titik fitur y aitu titik fitur y ang men galami getaran sehin gga akan memakan jarak temp uh y ang lebih besar darip ada titik fitur y ang lebih stabil. Getaran titik fitur di ilustrasikan sebagai berikut.
Gambar 2.24. Sebuah titik fitur y ang bergetar.
Sebuah titik fitur mungkin saja men galami ketidakp astian p osisi sehingga terlihat bergetar p ada p osisiny a. Damp ak dari getaran in i ad alah jarak titik temp uh y ang dihasilkan o leh titik ini d en gan titik y ang lebih stabil akan berb eda cukup jauh k arena jarak bergetar kesekitarny a. Oleh karena itu untuk mengh itung jarak p erp indahan sebuah titik fitur mak a men ggunak an jarak Euclid p ada framestart hingga framefinish sebany ak n frame untuk mendap atkan jarak temp uh y ang mendek ati jarak temp uh titik
y ang stabil. Pergerakkan titik fitur diilustrasikan p ada gamb ar berikut.
Gambar 2.25. (kiri) merup akan p ergerakkan titik fitur dengan adany a getaran dan (kanan) merup akan p ergerakkan titik fitur y ang stabil.
Jarak temp uh Euclid sebuah titik fitur dijelaskan oleh p ersamaan berikut,
(
) (
)
2 jy iy 2 jx ix p p p p p d = − + −dimana d merup akan jarak temp uh oleh titik fitur p dari p frame i ke frame jsebany ak n frame secara Eu clid.
Selisih jarak tempuh kedua titik fitur p dan q dihitung dengan persamaan berikut
(
)
2 q p pq d -d Δm =dimana Δm kemudian digunakan untuk menghitung nilai bobot kesamaan jarak pq tempuh dua titik berdasarkan persamaan berikut, spq,movement=MF
(
Δmpq,Δmmax)
dimanamax
Δm merupakan selisih maksimal perbedaan jarak tempuh dua titik fitur yang diperbolehkan yaitu kurang dari dua piksel, yang ditentukan secara empiris.
Jarak tempuh sebuah titik juga dapat dipergunakan untuk mengasumsikan bahwa titik fitur tersebut mengalami gagal pelacakan pada frame – frame selanjutnya
atau titik fitur tersebut merupakan titik fitur dari latar karena masking yang
dipergunakan juga tidak sempurna sehingga perlu perbaikan/ antisipasi seperti ini. Kegagalan pelacakan atau bisa kita sebut dengan titik fitur macet/ stacked feature point
ditandai dengan kecilnya nilai dari jarak tempuh titik fitur dalam n frame, batas threshold yang dipergunakan adalah kurang dari dua piksel, ditentukan secara empiris.
Titik fitur yang mengalami gagal pelacakan akan dihapus dari atas frame.
2.11.5.6.Kesamaan Arah Gerak
Titik fitur yang melekat pada objek seharusnya bergerak dengan arah yang sama mengikuti arah gerak dari objek. Penentuan arah dilakukan dengan model 2D yang dimodelkan dalam bidang kartesian. Arah objek ditunjukkan dalam nilai
° ≤ ≤
° θ 360
Gambar 2.26. Pergerakk an sebuah titik den gan arah dari titik start i ke titik finish j di
modelkan p ada bid an g kartesian membentuk sudut α.
Selisih arah dua buah titik fitur ditunjukkan d alam selisih sudut arah gerak dari masin g-masin g titik fitur diilustrasikan sebagai berikut.
Gambar 2.27. ilustrasi p ergerakkan dua bu ah titik fitur p (hijau) dan q (biru) p ada arah
Titik hijau dan biru merupakan ilustrasi dua titik fitur yang berbeda yang berada pada frame ke i. Kedua titik fitur berada didalam sebuah frame dimana koordinat
frame dimulai dengan (0,0) pada ujung kiri atas. Sudut titik fitur α dan
β
merupakan sudut pergerakkan dari masing – masing titik fitur yang dihitung dengan menggunakan metode Azimuth. Selisih kedua sudut dihitung dengan menggunakan persamaan(
)
2 pq α βΔdir = −
dan kemudian dipergunakan untuk menentukkan nilai kesamaan arah gerak berdasarkan persamaan berikut, spq,direction=MF
(
Δdirpq,Δdirmax)
dimana Δdir merupakan batas maxthreshold selisih maksimum kedua sudut dari pergerakkan titik fitur yaitu kurang dari 2
derajat, yang ditentukkan secara empiris.
2.11.6. Reduksi Invalid Connection
Setelah bobot dari setiap koneksi titik fitur ei,pq telah diketahui, maka sekarang kita bisa menentukan koneksi mana yang merupakan koneksi dalam sebuah objek dan mana yang bukan. Penentuan tersebut diketahui berdasarkan bobot dari koneksi, jika nilai bobot dari koneksi diatas ambang batas/ threshold yang telah ditentukan, maka
koneksi tersebut digolongkan kedalam koneksi sebuah objek. Sebaliknya bila bobot koneksi berada dibawah nilai threshold maka koneksi tersebut merupakan sebuah
koneksi antar objek yang berbeda dan akan dihilangkan. Batas threshold emaxadalah 0.7
Gambar 2.28. Ilusrasi p embobotan dan p engklasifikasian koneksi.
Setelah dilakukan analisis bobot relasi antar titik fitur, dip eroleh bobot koneksi dimana bobot y ang memiliki n ilai dibawah threshold diilustrasikan den gan warna merah
dan bobot y ang memiliki n ilai diatas threshold diilustrasikan den gan warn a hitam.
2.11.7. Pengelompokan Titik Fitur
Pada ilustrasi gamb ar sebelu mny a diasumsikan koneksi berwarna merah y an g telah dihilan gkan sehin gga y ang tersisa ad alah kon eksi warna h itam. Selan jutny a koneksi y ang berwarna hitam dik elomp okkan den gan cara melihat keterhubun ganny a dengan koneksi lain den gan men ggunakan teknik graph traversal sehingga k ita
mendap atkan graph-graph y angdihitun g sebagai bany akny a cluster.
Gambar 2.29. Pen gelo mp okan cluster kedalam masin g-masin g p enamp ung.
Koneksi y ang sudah tereduksi bisa saja memb entuk cycle ataup un bukan cycle.
lain p ada kon eksi y ang tersisa. Selama titik fitur terhubung antar sambun gan koneksi, maka titik fitur tersebut dikelomp okkan kedalam sebu ah cluster.
2.11.8. Analisis Relasi Cluster
Pada sebuah citra kend araan san gat mun gk in memiliki beberap a cluster y an g
berbeda. Hal tersebut dikarenakan kump ulan titik fitur y ang tersebar memiliki batas maksimum jarak antara dua buah titik fitur.
Gambar 2.30. Dua kelo mp ok cluster p ada objek terp isah secara sp asial.
Oleh karen a itu kita p erlu men ggabun gk an dua bu ah cluster p ada objek y an g sama tetap i terp isah satu sama lainny a. Sep erti halny a analisis relasi dua bu ah titik fitur, analisis relasi dua buah cluster juga memerlukan p endefinisian bobot relasi antar cluster. Bobotdip eroleh berdasarkan p ersamaan berikut,
3 / ) sc sc (
eciPQ = PQ,space + PQ,motion
dimana eciPQ merup akan bobot koneksi dua buah cluster P dan Q p ada frame ke i.
2.11.8.1.Analisis S pasial Cluster
Sep erti halny a dua buah titik fitur y ang memp uny ai jarak sp asial maksimum keduany a, dua bu ah cluster ju ga memiliki dua bu ah jarak sp asial maksimum kedua kelomp ok titik fitur tersebut. Jarak dua buah cluster dcPQ
minimu m dari p adalah titik fitur dari cluster p ertama dan q ad alah titik fitur dari cluster
kedua kedua d iilustrasikan sebagai berikut.
Gambar 2.31. Jarak minimu m dua buah cluster.
Sedan gk an jarak maksimum k edua bu ah cluster d itentukan secara emp iris
berdasarkan jarak dua buah cluster y an g mun gkin d iamb il d ari sebu ah k endaraan. Jarak
sp asial maksimum dua buah cluster dcmax bernilai 7 p ersen d ari lebar citra y ang dip ergunakan. Sehin gga den gan demikian bobot sp asial dua buah cluster ditentukan
berdasarkan p ersamaan scPQ,space = MF
(
dcPQ,dcmax)
. Semakin d ekat jarak dua buahcluster mak a nilai scPQ,space akan semak in besar.
2.11.8.2.Analisis Gerak Cluster
Analisis kesamaan gerak du a buah cluster ditentukan berd asarkan n ilai kesamaan jarak temp uh dan arah p ergerakk an rataan dari setiap titik fitur p ada kedua
cluster den gan p ersamaan berikut,
direction PQ, movement PQ, e coexistanc PQ, motion PQ, sc sc sc sc = = + .
Kesamaan gerak hany a ditentukan oleh nilai koeksistensi tanp a adany a nilai koherensi sebab sebuah cluster terdiri dari bany ak titik fitur dimana koherensi titik fitur sudah mewakilk an kestabilan gerak dari cluster ju ga.
2.11.8.3.Kesamaan Jarak Tempuh Cluster
Kesamaan jarak temp uh kedua buah cluster dilih at berdasarkan k esamaan jarak
temp uh rata-rata seluruh titik fitur p ada masin g-masin g cluster dan nilai bobotny a
dinormalk an den gan men ggunakan fun gsi terjal cosinus kuadrat sebagai b erikut,
(
PQ max)
F movement
PQ, M Δmc ,Δmc
sc = dimana ΔmcPQ merup akan selisih jarak temp uh
rata-rata titik fitur p ada cluster P dan cluster Q,
n m n m Δmc n 0 q q n 0 p p PQ
∑
∑
= = − =dan Δmcmax =Δmmax dikarenakan k esamaan jarak temp uh cluster dan titik fitur berada p ada selisih maksimu m y ang sama.
Gambar 2.32. Ilustrasi kesamaan jarak temp uh dua buah cluster y ang bergerak didalam objek y ang sama.
Pada gamb ar 3.16 ku mp ulan titik fitur hijau merup akan cluster y ang p ertama dan kump ulan titik fitur biru merup akan cluster y ang kedu a. Ap abila kedu a buah cluster tersebut merup akan bagian dari rep resentasi dari p ergerakkan sebuah objek, mak a jarak temp uh y ang dialami oleh masin g-masin g titik fitur p ada cluster p ertama dan kedua akan berselisih min imum.
2.11.8.4.Kesamaan Arah Gerak Cluster
Kesamaan arah gerak kedu a buah cluster dilih at berdasarkan kesamaan arah
gerak rata-rata seluruh titik fitur p ada masin g-masin g cluster d an n ilai bobot ny a
dinormalk an den gan men ggunakan fun gsi terjal cosinus kuadrat sebagai b erikut,
(
PQ max)
F direction
PQ, M Δdirc ,Δdirc
sc = diman a Δdirc merup akan selisih jarak temp uh PQ rata-rata titik fitur p ada cluster P dan cluster Q,
n dir n dir Δdirc n 0 q q n 0 p p PQ
∑
∑
= = − =dan Δdircmax =Δdirmax dikarenak an k esamaan arah gerak cluster dan titik fitur berada p ada selisih maksimu m y ang sama.
Gambar 2.33. Ilustrasi kesamaan arah gerak dua bu ah cluster y ang bergerak did alam objek y ang sama.
Rata-rata arah dari sekump ulan titik fitur sebuah cluster akan merep resentasikan arah p ergerakkan dari cluster tersebut. Dua buah cluster y ang terdap at didalam objek y ang sama akan memiliki selisih arah p ergerakk an y ang minimu m.
2.11.9. Reduksi Invalid Cluster Connection
Setelah bobot dari masin g-masin g koneksi antar cluster telah didefinisik an, maka untuk dap at diterima sebagai kon eksi y ang valid, bobot dari koneksi harus b erada diatas angk a threshold 0,5 y ang telah ditentukan secara emp iris.
Gambar 2.34. Ilustrasi koneksi antar cluster telah terdefinisi.
Pada ilustrasi sebelah k iri, koneksi den gan bobot nilai diatas threshold berwarna hijau d an bobot nilai dib awah threshold berwarn a merah. Koneksi berwarna merah akan direduksi sehin gga y ang tersisa adalah cluster berwarna hijau. Terlihat p ada ilustrasi, walaup un cluster A dan cluster B memiliki koneksi y an g buruk, tetap i
keduany a dap at terhubung melalu i cluster C.
Pada ilustrasi sebelah k anan, terdap at dua buah koneksi y ang b erbobot dibawah threshold atau kita meny ebutny a invalid cluster connection dimana cluster A akan
terp utus secara mandiri men jadi sebuah objek dan cluster B dan C akan tergabung
menjad i sebuah objek.
2.11.10.Pengelompokan Cluster
Setelah d ilakuk an p enghap usan koneksi cluster y ang lemah, p engelomp okan cluster dap at dilakukan d en gan men ggunak an kembali metode graph traverse dimana
Gambar 2.35. Ilustrasi koneksi cluster y ang lemah telah d ihap uskan dan terlihat
keterhubungan antar cluster den gan koneksi y ang ku at.
Pada ilustrasi kiri, terlihat bahwa cluster A, B, dan C saling terhubun g,
sehingga ketiga cluster tersebut digabun gk an men jadi satu objek. Pad a ilustrasi kanan,
terlihat bahwa hany a cluster B dan C y ang saling terhubun g, sedan gkan cluster A
terp isah, sehingga cluster A akan dikelo mp okkan menjadi objek p ertama dan cluster B
dan C dikelo mp okkan menjad i objek k edua.
Gambar 2.36. Hasil p engelomp okan cluster menjadi objek.
Pembuatan objek baru hany a dilakukan ap abila titik-titik fitur y ang ad a p ada sebuah cluster tidak tergabun g den gan objek man ap un, dan ap abila terdap at sebuah titik
fitur y ang tergabun g p ada sebuah objek, maka dap at diasumsikan seluruh titik-titik dari
cluster tersebut dan cluster y ang salin g berhubun gan ju ga merup akan an ggota dari objek
Gambar 2.37. Ilustrasi p enggabun gan cluster ked alam objek.
Penambahan titik fitur baru d ari sebuah cluster k edalam sebuah objek y an g
sudah ada sebelumny a memb erikan kep astian jumlah objek y an g tertamp il p ada lay ar. Teknik ini akan gagal ap abila cluster y ang dip ilih p ertama tidak mengandun g titik fitur
p ada objek, p adahal cluster lainny a y ang terhubun g men gandun g titik fitur y ang sama
p ada objek.
2.11.11.Penggabungan Objek
Penggabun gan objek p erlu dilakukan sebab p ada tahap p engelomp okan cluster
terdap at masih kemun gkinan gagal menemukan titik fitur y an g sama p ada ob jek. Selain itu p enggabun gan ob jek dilakukan untuk mereduksi objek y ang salin g b eririsan anggotany a.
Objek-objek y an g beririsan kemudian d iintegrasikan den gan objek y an g memiliki titik fitur y ang p alin g bany ak dan objek lainny a dihap uskan.
Gambar 2.39. ilustrasi integrasi dan p en ghap usan objek.
2.11.12.Pelacakan Objek
Keberadaan objek berkorelasi secara lan gsun g den gan keb eradaan dari titik fitur y ang dibawany a. Seh in gga den gan demikian p elacakan ob jek d ilakuk an den gan melakuk an p elacakan titik fitur dengan menggun akan Optical Flow dari Lucas Kanade.
Oleh sebab itu ap abila ada p engh ap usan titik fitur didalam sebuah objek mak a akan memp engaruhi secara lan gsun g keberad aan objek tersebut. Sebuah objek dap at dikatakan terhap us ap abila sebuah titik fitur p ada objek tersebut melewati batas tep i dari citra. Penghitun gan ju mlah objek dilakukan den gan men ghitung jumlah objek y ang tertamp il di lay ar. Untuk p enghitungan jumlah objek secara keseluruh an dilakukan dengan cara men gh itung ju mlah ob jek y ang tercip ta.
Pada ilustrasi diatas, objek akan terdeteksi pertama kali setelah mencapai 7 frame pertama melalui proses analisis relasi titik fitur. jumlah objek yang berhasil terdeteksi pertama kali adalah 3 objek dan total objek pertama kali akan sama dengan jumlah objek yaitu 3 objek. Pada frame 14 terlihat adanya objek baru beridentitas 4
yang ditambahkan dan objek beridentitas 2 telah mengalami penghapusan. Sehingga jumlah objek yang ada pada frame 14 adalah 3 objek dan total objek yang tercatat
adalah 4 objek yang pernah dibuat.
Objek yang masuk dan diam didalam layar tidak layak untuk dihitung sehingga penambahan total objek semula akan dikurangkan untuk objek yang diam tersebut. Sehingga dengan demikian program yang dirancang hanya dapat menghitung objek yang masuk dan keluar dari layar saja.
Pelacakkan objek dilakukan dalam empat arah yaitu utara, timur, selatan, dan barat. Arah objek ditentukan dari arah pergerakkan sebuah titik fitur pada objek tersebut yang dihitung dengan menggunakan metode kuadran azimuth. Setiap arah ditentukan dalam suatu rentangan sudut dalam kuadran azimuth. Rentang arah utara digunakan sudut θ≥315°&θ<45°, rentang arah timur digunakan sudut 45°≤θ<135°, rentang arah selatan digunakan sudut 135°≤θ<225°, dan rentang arah barat digunakan sudut
° < ≤
° θ 315
225 .
2.12. Qt S DK (Software Development Tools Kit)
Qt adalah sebuah aplikasi Cross-Platform dan User Interface Framework. Qt
memiliki pustaka yang Cross-Platform, alat pengembangan yang terintegrasi dan Cross-Platfrom IDE. Pengertian dari Cross-Platform adalah sumber kode yang dibuat dapat
dibangun di banyak jenis sistem operasi seperti Windows, Linux dan Machintos tanpa harus menulis ulang kode yang berbeda (Qt Nokia, 2012).
2.13. Pustaka OpenCV (Open Computer Vision)
OpenCV adalah pustaka open source yang ditujukan untuk visi komputer real time. OpenCV dapat berjalan di berbagai sistem operasi seperti Windows, Linux, dan
Machintos. OpenCV asli ditulis dalam bahasa C, tetapi sekarang telah diterjemahkan dalam bahasa C++. Ada juga terjemahan dalam bahasa Phyton, Ruby, Matlab dan bahasa lainnya (Bradski & Kaehler, Learning OpenCV, 2008, hal. 1).
Contoh aplikasi dari pustaka OpenCV adalah interaksi manusia dan komputer, seperti identifikasi, segmentasi dan pengenalan objek, pengenalan wajah, pengenalan gerak tubuh, trajeksi pergerakkan, gerak ego, pengertian pergerakkan, struktur dari pergerakkan, kalibrasi stereo dan multi kamera, komputasi jarak objek, dan robotika mobile (FullOpenCVWiki, 2012).